Предлагаемое изобретение относится к оборонной технике, а именно к высокоточному управляемому оружию ближней тактической зоны, и может использоваться на ударных вертолетах и штурмовых самолетах.
В настоящее время в нашей стране и за рубежом придается большое значение ударным вертолетам, обеспечивающим эффективную огневую поддержку сухопутным войскам благодаря своей мобильности, маневренности и возможности быстрого сосредоточения на требуемых участках боевых операций.
Анализ тенденций развития авиационной техники показывает, что главными направлениями совершенствования ударных вертолетов является оснащение их высокоточным управляемым оружием, средствами автономного целеуказания и точного прицеливания. Это позволит вертолетам с высокой вероятностью поражать малоразмерные наземные и воздушные цели в любое время суток, в различных метеоусловиях при огневом и информационном противодействии противника.
В рамках программы FCS ключевым направлением работ США по созданию перспективного вертолетного управляемого вооружения является разработка управляемой ракеты JCM, предназначенной для оснащения ударных вертолетов типа AH-64D "Апач Лонгбоу" и OH-58D (журнал "Зарубежное военное обозрение" №1, 2006 г., стр.40-44). Ракета должна поступить взамен состоящих на вооружении ракет AGM-114 «Хеллфайр» и AGM-65 «Мейверик», ее дальность стрельбы составляет 16 км, максимальная скорость не более 300 м/с, первые поставки для войск начнутся в 2008 г.
Указанный комплекс вооружения является аналогом заявляемому и содержит радиолокационную станцию (РЛС) поиска, обнаружения и сопровождения целей, теплотелевизионный прицел, лазерный дальномер-целеуказатель, блок передачи на ракету команд управления по радио или по волоконно-оптической линии связи (ВОЛС), систему отображения информации (видеомониторы), датчики параметров движения вертолета, вычислитель и пусковую установку для ракет. Ракета расположена в транспортно-пусковом контейнере и содержит двигатель, аппаратуру управления, трехрежимную головку (ГСН) самонаведения (лазерную полуактивную, пассивную тепловизионную, активную радиолокационную), ВОЛС, рулевой привод и блок приема данных по радио или ВОЛС.
Система управления полетом ракеты функционирует в двух режимах: активное самонаведение при захвате ГСН цели до пуска на малых дальностях стрельбы и ручное корректирование траектории полета ракеты по радио или ВОЛС при отсутствии захвата ГСН цели до пуска с последующим переключением с ручного управления на самонаведение на конечном участке.
Основными недостатками аналога являются:
- комплекс не обеспечивает залповую стрельбу ракетами на большие дальности (более 4-5 км) из-за ручной коррекции траектории полета в случае захвата ГСН цели в процессе полета на конечном участке;
- низкая помехозащищенность от организованных радиопомех из-за наличия радиоканала связи при коррекции траектории полета ракеты.
В качестве прототипа для сравнения с заявляемым устройством принят комплекс Spike-ER (Израиль), предназначенный для поражения бронированной и другой номенклатуры целей на дальностях до 8 км и размещаемый на ударных вертолетах АН-1 Cobra, SA 330L Puma и др. (Military Technology, 1998, №4, pp.26-28; Compendium by Armada, Anti-Armour Weapons, 2000, pp.1-30).
Комплекс Spike-ER содержит обзорно-прицельную систему с теплотелевизионным прицелом, видеомонитор, вычислитель, пульт управления комплексом и пусковую установку (неподвижную) с ракетами. Ракеты размещены в транспортно-пусковом контейнере и каждая содержит стартово-маршевый двигатель, теплотелевизионную ГСН, блок электроники, рулевой привод и катушку ВОЛС.
Эффективная дальность стрельбы комплекса - 8 км, максимальная скорость полета ракеты - 180 м/с, средняя - 160 м/с, время полета ракеты на 8 км - 50 с, вероятность поражения цели типа «танк» - 0,6-0,7. Комплекс принят на вооружение ВС Израиля и будет находиться на вооружении до 2020 г.
В комплексе используются два режима управления ракетой: автономное самонаведение в случае захвата ГСН цели до пуска при стрельбе на дальности до 4-5 км и комбинированное ручное управление по ВОЛС с участием пилота (при отсутствии захвата ГСН цели до пуска) и самонаведение на конечном участке при последующем захвате ГСН цели.
Основными недостатками прототипа являются:
- не обеспечивается залповая стрельба ракетами по нескольким целям на дальностях более 4-5 км из-за ручного наведения пилотом ракеты по ВОЛС;
- не обеспечивается эффективная стрельба по скоростным воздушным и движущимся наземным целям на больших дальностях вследствие низкой скорости и большого времени полета ракеты (50 с на 8 км). Например, за это время цель типа «танк», движущаяся со скоростью 15 м/с, пройдет расстояние 750 м и с большой вероятностью может скрыться за складками местности, преграду или строение;
- наличие ручного наведения с участием пилота требует значительного снижения скорости ракеты, при этом возрастает вероятность поражения вертолета средствами ПВО противника;
- наличие комбинированной системы управления ракетой усложняет конструкцию ракеты (теплотелевизионная ГСН, катушка ВОЛС) и комплекса в целом, что значительно увеличивает их стоимость.
Задачей предлагаемого изобретения является создание вертолетного комплекса высокоточного оружия ближнего действия, обеспечивающего эффективное поражение нескольких неподвижных и движущихся малоразмерных наземных и скоростных воздушных целей залповым пуском высокоскоростных управляемых ракет в условиях действия средств ПВО противника при относительно простой конструкции ракеты.
Решение данной задачи достигается тем, что в вертолетном комплексе высокоточного оружия ближнего действия, содержащем обзорно-прицельную систему с теплотелевизионным прицелом, приводами наведения и датчиками углов поворота, вычислитель, видеомонитор, датчики параметров движения вертолета и пульт управления, а также ракеты с рулевым приводом и стартово-маршевым двигателем, размещенные в транспортно-пусковых контейнерах, которые установлены на пусковой установке, при этом выходы датчиков углов поворота обзорно-прицельной системы соединены с первым входом вычислителя, второй вход которого соединен с выходом датчиков параметров движения вертолета, третий вход - с первым выходом пульта управления, первый выход вычислителя соединен с первым входом видеомонитора, второй вход которого соединен с выходом теплотелевизионного прицела, второй выход пульта управления соединен с первым входом приводов наведения обзорно-прицельной системы, а третий выход - со входом стартово-маршевого двигателя ракеты, новым является то, что пусковая установка выполнена подъемно-поворотной и в обзорно-прицельную систему введены лазерно-лучевой блок управления ракетой и автомат сопровождения целей, при этом второй выход вычислителя соединен со входом лазерно-лучевого блока управления ракетой, третий выход вычислителя соединен со входами приводов наведения пусковой установки, вход автомата сопровождения целей соединен с выходом теплотелевизионного прицела, а выход - со вторым входом приводов наведения обзорно-прицельной системы, а на ракете введены последовательно соединенные приемник излучения и электронный блок выделения координат ракеты, выход которого соединен со входом рулевого привода.
Изобретение поясняется графическим материалом, где на чертеже представлена блок-схема предлагаемого вертолетного комплекса высокоточного оружия, содержащего 1 - обзорно-прицельную систему (ОПС), 2 - теплотелевизионный прицел, 3 - приводы наведения ОПС, 4 - датчики углов поворота ОПС, 5 - вычислитель, 6 - видеомонитор, 7 - датчики параметров движения вертолета, 8 - пульт управления, 9 - ракету, 10 - рулевой привод, 11 - стартово-маршевый двигатель, 12 - лазерно-лучевой блок управления ракетой, 13 - автомат сопровождения целей, 14 - подъемно-поворотную пусковую установку, 15 - приводы наведения пусковой установки, 16 - приемник излучения, 17 - электронный блок выделения координат ракеты.
Предлагаемый комплекс работает следующим образом.
Пилот вертолета подает с пульта управления 8 команды на приводы наведения 3 обзорно-прицельной системы 1 и осуществляет наведение линии визирования прицела 2 по азимуту и углу места. При этом на экране видеомонитора 6 воспроизводится обозреваемое прицелом пространство.
Обнаружив и распознав цели по экрану монитора 6, пилот наводит прицельную марку на приоритетную цель и переводит слежение линии визирования прицела 2 за целью в автоматический режим с помощью автомата сопровождения целей 13, который управляет приводами наведения 3 ОПС на основе обработки сигналов изображения цели с прицела 2 по контрастно-корреляционному методу.
Сигналы, пропорциональные углам и угловым скоростям линии визирования с датчиков углов поворота 4 ОПС, поступают на вход вычислителя 5, на второй вход которого подаются сигналы с датчиков параметров движения вертолета 7 (скорость, высота полета, углы курса, тангажа, крена и др.).
Вычислитель 5 по определенным алгоритмам вырабатывает сигналы управления приводами наведения 15 подъемно-поворотной пусковой установки 14, в соответствии с которыми пусковая установка следит за положением линии визирования прицела 2 с необходимыми углами упреждения для обеспечения точного встреливания ракет в луч управления лазерно-лучевого блока 12. Одновременно с вычислителя на видеомонитор подается информация о параметрах движения вертолета, цели и условиях стрельбы (сигнал «опасно», «пуск разрешен» и др.), а также с вычислителя подаются команды коррекции траектории полета ракеты на вход лазерно-лучевого блока 12, пропорциональные угловой скорости линии визирования и изменению параметров движения вертолета и цели в процессе пуска.
При устойчивом сопровождении цели автоматом 13 и наличии сигнализации на экране монитора о разрешении пуска пилот с пульта 8 подает команду на запуск стартово-маршевого двигателя 11 ракеты. После встреливания ракеты в луч, создаваемый лазерно-лучевым блоком управления 12, приемник излучения 16 ракеты осуществляет прием оптического сигнала, преобразует в электрический сигнал, декодирует его и передает в электронный блок выделения координат ракеты 17. Блок 17 вырабатывает команды управления, пропорциональные координатам ракеты относительно оси луча, съюстированной с линией визирования прицела 2, и команды коррекции траектории полета ракеты. Суммарные команды подаются в аэродинамический рулевой привод 10, в результате чего ракета наводится на цель.
Лазерно-лучевой блок управления ракетой 12 выполнен в виде формирователя узкого плоского луча, последовательно сканируемого по курсу и тангажу. Сигналы о координатах сканируемого плоского луча в поле управления ракетой и команды коррекции с вычислителя кодируются в блоке 12 и передаются в виде кодово-импульсного лазерного излучения, направленного на цель. На борту ракеты приемник 16 и электронный блок 17 осуществляют прием, декодирование сигнала, заложенного в луче, и выделяют координаты «полоски» луча в поле управления, соответствующие координатам ракеты в момент ее облучения «полоской», а также команды коррекции траектории. При залповой стрельбе несколькими ракетами по близко расположенным целям с вычислителя 5 передаются закодированные для каждой конкретной ракеты команды коррекции, соответствующие разности координат целей, наблюдаемых в прицеле 2 и вычисляемых в блоке 5.
Предлагаемый вертолетный комплекс высокоточного оружия ближнего действия по сравнению с известными обладает следующими преимуществами:
- обеспечивает точное наведение сверхскоростных ракет в залпе по неподвижным и движущимся малоразмерным наземным и воздушным целям благодаря применению системы управления ракетами в прямом луче лазера, которая не ограничивает скорость ракеты и позволяет передавать на ракеты по лучу информацию об изменении параметров движения вертолета, целей и условий стрельбы в процессе полета;
- имеет высокую помехоустойчивость от организованных помех благодаря введению в состав комплекса лазерно-лучевого блока управления ракетами в прямом луче лазера, а на ракете приемника излучения, ориентированного в пространстве в противоположную от противника сторону, что исключает попадание на него организованных радио и оптических помех;
- имеет простой аппаратурный состав ракеты, т.к. по сравнению с прототипом не содержит сложных и дорогостоящих блоков (тепловизионную ГСН и катушку ВОЛС), что значительно упрощает конструкцию ракеты и комплекса в целом;
- подъемно-поворотная пусковая установка обеспечивает стрельбу ракетами по целям, находящимся в поле зрения прицела, без изменения в полете курсового угла носителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО РУБЕЖА | 1998 |
|
RU2135391C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| Способ стрельбы телеориентируемыми в луче лазера ракетами с вертолета | 2024 |
|
RU2841348C1 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОКОРАБЕЛЬНОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2771076C1 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТ, УПРАВЛЯЕМЫХ ПО ЛУЧУ ЛАЗЕРА, И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569045C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
Изобретение относится к оборонной технике, а именно к высокоточному управляемому оружию ближней тактической зоны, и может использоваться на ударных вертолетах и штурмовых самолетах. Технический результат - эффективное поражение нескольких неподвижных и движущихся малоразмерных наземных и скоростных воздушных целей залповым пуском высокоскоростных управляемых ракет. Комплекс содержит обзорно-прицельную систему с теплотелевизионным прицелом, приводами наведения и датчиками углов поворота, вычислитель, видеомонитор, датчики параметров движения вертолета и пульт управления, а также ракеты с рулевым приводом и стартово-маршевым двигателем, размещенные в транспортно-пусковых контейнерах, которые установлены на пусковой установке. Пусковая установка выполнена подъемно-поворотной, и в обзорно-прицельную систему введены лазерно-лучевой блок управления ракетой и автомат сопровождения целей. 1 ил.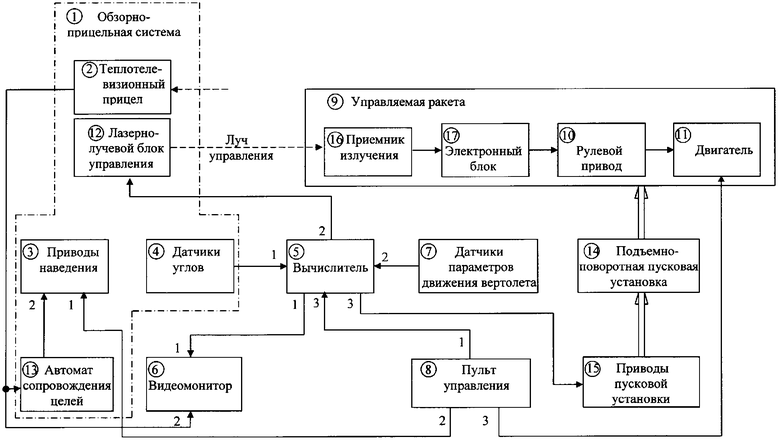
Вертолетный комплекс высокоточного оружия ближнего действия, содержащий обзорно-прицельную систему с теплотелевизионным прицелом, приводами наведения и датчиками углов поворота, вычислитель, видеомонитор, датчики параметров движения вертолета и пульт управления, а также ракеты с рулевым приводом и стартово-маршевым двигателем, размещенные в транспортно-пусковых контейнерах, которые установлены на пусковой установке, при этом выходы датчиков углов поворота обзорно-прицельной системы соединены с первым входом вычислителя, второй вход которого соединен с выходом датчиков параметров движения вертолета, третий вход - с первым выходом пульта управления, первый выход вычислителя соединен с первым входом видеомонитора, второй вход которого соединен с выходом теплотелевизионного прицела, второй выход пульта управления соединен с первым входом приводов наведения обзорно-прицельной системы, а третий выход - со входом стартово-маршевого двигателя ракеты, отличающийся тем, что пусковая установка выполнена подъемно-поворотной и в обзорно-прицельную систему введены лазерно-лучевой блок управления ракетой и автомат сопровождения целей, при этом второй выход вычислителя соединен с входом лазерно-лучевого блока управления ракетой, третий выход вычислителя соединен со входами приводов наведения пусковой установки, вход автомата сопровождения целей соединен с выходом теплотелевизионного прицела, а выход - со вторым входом приводов наведения обзорно-прицельной системы, и на ракете введены последовательно соединенные приемник излучения и электронный блок выделения координат ракеты, выход которого соединен с входом рулевого привода.
| Military Technology, 1998, №4, pp.26-28 | |||
| Compendium by Armada, Anti-Armour Weapons, 2000, pp.1-30 | |||
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ САМОЛЕТА | 2002 |
|
RU2216484C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2150070C1 |
| АВТОТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2542863C1 |

