Изобретение относится к области железнодорожного транспорта, в частности к автоматизации управления тормозами поезда.
Известно устройство для автоматического управления торможением поезда (Ав. св. СССР №658017, МПК B60T 8/00), содержащее схему управления трехпозиционным элементом на основе цифроаналогового блока программной скорости, выход которого связан с входом операционного усилителя, подключенного к вентилям торможения и отпуска тормозной системы поезда, с которыми соединен вход датчика давления в тормозной магистрали и регулятора коэффициента усиления, включенного в обратную связь операционного усилителя и соединенного с измерителем пути и блоком программной скорости. Недостатком известного технического решения является то, что аналоговая схема может обеспечить только простые законы управления трехпозиционным элементом, а также затруднена адаптация к условиям движения и отсутствует возможность дистанционного управления.
Известен способ управления тормозами поезда (Ав. св. СССР №658017, МПК B60T 8/00), при котором трехпозиционный релейный элемент управляет работой вентилей торможения и отпуска в зависимости от напряжения на выходе операционного усилителя и реализует режимы наполнения, перекрытия и отпуска тормозных цилиндров. Недостатком данного способа управления является низкая точность регулирования скорости, обусловленная возможными отклонениями расчетных и фактических параметров.
Наиболее близким по технической сущности к заявляемому, взятым за прототип является устройство для автоматического управления торможением поезда (Патент РФ №2283786, МПК B60T 8/172, B61L 3/12), содержащее расположенную в начале каждого блок-участка пути передающую антенну, соединенную с генератором, и расположенные на локомотиве приемную антенну, соединенную с блоком приема информации, датчик угла поворота, установленный на буксе колеса и соединенный с входами измерителя пути и измерителя скорости, измеритель эффективности тормозов, подключенный к выходам измерителя ускорения и датчика давления в тормозной магистрали, блок программной скорости, первый вход которого соединен с выходом измерителя пути, второй вход - с выходом блока приема информации, третий вход - с выходом блока автоматической локомотивной сигнализации, четвертый вход - с выходом измерителя эффективности тормозов, трехпозиционный релейный элемент, подключенный к вентилям торможения и отпуска тормозной системы поезда, измеритель диаметра бандажа колесной пары, первый вход которого соединен с выходом датчика давления в тормозной магистрали, второй вход - со вторым выходом блока приема информации, третий вход - с первым выходом блока постоянно запоминающего устройства, а его выходы подключены к входам измерителя пути и измерителя скорости; второй выход блока постоянно запоминающего устройства соединен с входом измерителя эффективности тормозов, третий выход - с пятым входом блока программной скорости, а каждый из двух его входов соединен соответственно с третьим выходом блока приема информации и выходом формирователя границ блок-участков пути, вход формирователя границ блок-участков пути связан с выходом блока автоматической локомотивной сигнализации.
Недостатком указанного устройства являются ограниченные возможности его использования при реализации режима автоведения для современных типов локомотивов с модульным принципом построения, при котором подсистемы тяги, торможения, локомотивной безопасности, управления локомотивом и автоведения реализуются в виде законченных модулей со встроенными электронными устройствами управления, связь между которыми должна осуществляться дистанционно с помощью коммуникационных каналов связи и шлюзов, обеспечивающих управление электропневматическими тормозами поезда с помощью передачи команд управления в цифровом коде без непосредственного воздействия на трехпозиционный релейный элемент.
Известен также способ автоматического управления тормозами поезда, взятый за прототип (Никифоров Б.Д., Головин В.И., Кутыев Ю.Г. Автоматизация управления торможением поездов. - М.: Транспорт, 1985, - 263 с.), заключающийся в том, что с помощью блока программной скорости на основании полученной от подключенных к его входу устройств информации вычисляют программное значение скорости, и по формуле:

где vп, v - программная и текущая скорость; Ртц - давление в тормозных цилиндрах; k - коэффициент передачи корректирующего звена, вычисляются ошибку регулирования и выдают команду трехпозиционному релейному элементу, с помощью которого управляют вентилями торможения и отпуска тормозной системы поезда по следующему правилу:
где 2b - выбранная заранее зона нечувствительности регулятора.
Недостатком известного способа управления являются ограниченные возможности его использования применительно к современным типам локомотивов с модульной архитектурой и дистанционным управлением электропневматическими тормозами поезда в режиме автоведения, поскольку задержки при передаче команд в канале связи и вычисление ошибки регулирования по линейному закону ведут к ухудшению качества управления с частым переключением режимов работы тормозного оборудования, а также к избыточным тормозным усилиям при малых скоростях поезда вследствие нелинейной зависимости тормозного коэффициента от скорости, что снижает его надежность, приводит к дополнительным износу тормозных колодок, воздействиям на конструкцию подвижного состава, нарушению плавности снижения скорости вплоть до остановки и снижению комфортных условий движения для пассажиров.
Задачей изобретения является расширение функциональных возможностей прототипа для реализации дистанционного управления электропневматическими тормозами поезда в режиме автоведения с обеспечением качества управления, которое определяется отсутствием частого переключения режимов работы тормозного оборудования, дополнительного износа тормозных колодок и воздействий на конструкцию подвижного состава, а также плавным снижением скорости вплоть до остановки.
Сущность изобретения в части устройства заключается в том, что в устройство, включающее с учетом существенных признаков блок программной скорости, к входам которого подключены блок постоянного запоминающего устройства, блок автоматической локомотивной сигнализации, блок приема информации, измеритель пути, измеритель скорости, измеритель ускорения, измеритель эффективности тормозов, трехпозиционный релейный элемент, вентили торможения и отпуска тормозной системы поезда введены второй выход блока программной скорости, формирующий текущее рассогласование программной и фактической скоростей, блок дифференцирования для вычисления производной рассогласования, блок корректировки рассогласования по давлению в тормозных цилиндрах, нечеткий контроллер для нахождения требуемого давления в тормозных цилиндрах по нелинейному закону на основе процедуры нечеткого вывода, включающий блоки фуззификации, нечеткого вывода, базы правил, а также дефуззификации, коммуникационный канал связи для передачи значения найденного давления от нечеткого контроллера в блок регулирования давления в тормозных цилиндрах, управляющий вентилями отпуска и торможения для установления требуемого давления, датчик давления в тормозных цилиндрах, подсоединенный к вентилям отпуска и торможения, причем первый выход блока программной скорости отображает значение текущей скорости, получаемой от измерителя скорости, и соединен с первым входом нечеткого контроллера, второй выход блока программной скорости связан со входами соответственно блока дифференцирования, выход которого соединен со вторым входом нечеткого контроллера, и блока корректировки рассогласования по давлению в тормозных цилиндрах, выход которого соединен с третьим входом нечеткого контроллера, а второй вход - с датчиком давления в тормозных цилиндрах, выход нечеткого контроллера соединен с помощью коммуникационного канала связи с первым входом блока регулирования давления в тормозных цилиндрах, второй вход которого соединен с выходом датчика давления в тормозных цилиндрах, а выход - с трехпозиционным релейным элементом, выход которого, в свою очередь, связан со входом вентилей отпуска и торможения, своим выходом связанного с датчиком давления в тормозных цилиндрах.
Сущность изобретения в части способа заключается в том, что блоком программной скорости на основании информации о текущей скорости, расстоянии до места остановки или следующего ограничения скорости, кодах сигналов светофоров, профиле пути на участке, действительном значении тормозного коэффициента в каждый момент времени вычисляют программную скорость, соответствующую необходимому замедлению, и рассогласование текущей и программной скоростей, корректируют рассогласование на величину давления в тормозных цилиндрах, дополнительно блоком дифференцирования вычисляют производную рассогласования, нечетким контроллером на основании текущей скорости, скорректированного рассогласования и производной рассогласования с помощью блоков фуззификации, нечеткого вывода, базы правил и дефуззификации вычисляют по нелинейному закону на основании процедуры нечеткого вывода требуемое значение давления в тормозных цилиндрах для реализации необходимого замедления, которое передают с помощью коммуникационного канала связи в блок регулирования давления в тормозных цилиндрах, с помощью которого на основе сравнения текущего и требуемого значений давления в тормозных цилиндрах формируют команды управления трехпозиционным элементом, с помощью которого управляют вентилями отпуска и торможения.
Техническим результатом является возможность дистанционного автоматического управления электропневматическими тормозами поезда при передаче команд управления в виде цифровых кодов с помощью коммуникационного канала связи с отсутствием частого переключения режимов работы тормозного оборудования, а также избыточных тормозных усилий за счет нелинейного закона управления на основе процедуры нечеткого вывода.
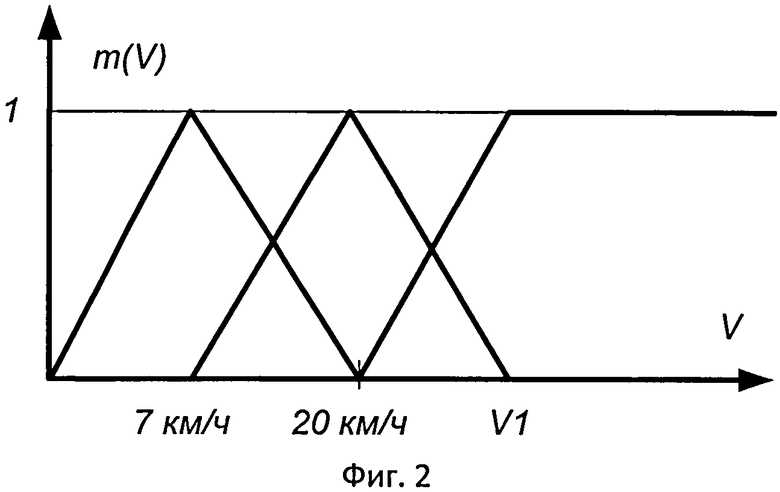
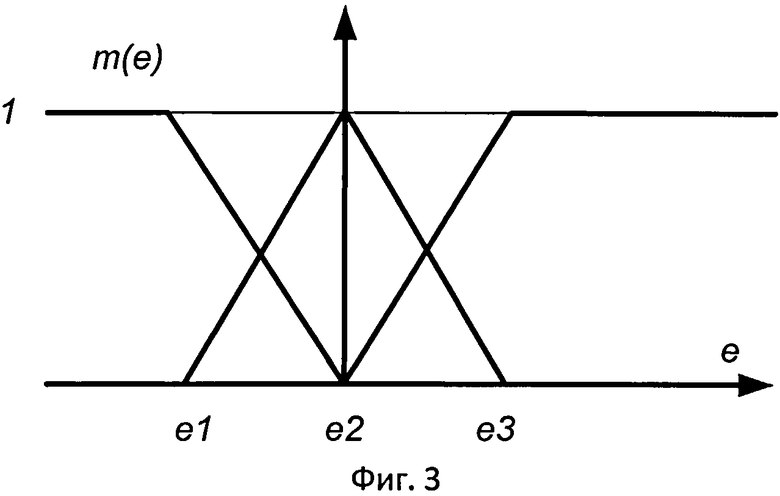
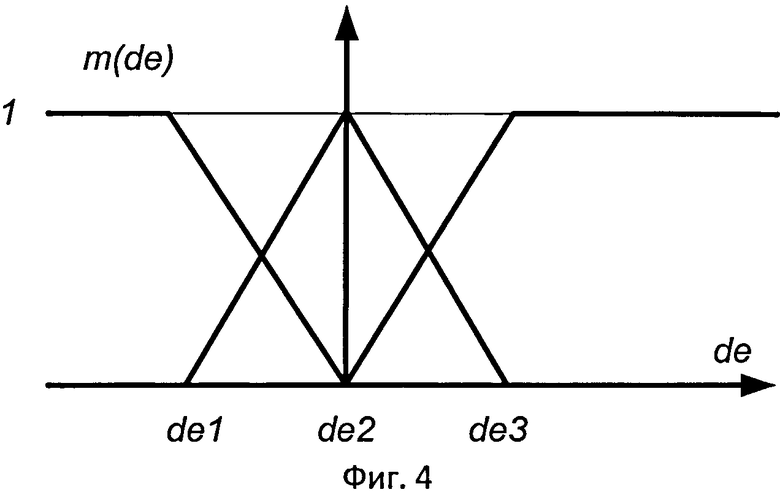
На фиг.1 представлена блок-схема заявляемого устройства для автоматического управления электропневматическими тормозами поезда. На фиг.2 представлены функции принадлежности термов «больше 20 км/ч», «около 20 км/ч», «около 7 км/ч» лингвистической переменной «скорость», на фиг.3 и фиг.4 - функции принадлежности термов «положительное», «примерно нуль», «отрицательное» лингвистических переменных «рассогласование» и «производная рассогласования», используемых в процедуре нечеткого вывода для определения требуемого давления в тормозных цилиндрах.
Устройство для автоматического управления электропневматическими тормозами поезда содержит блок программной скорости 1, первый, второй, третий, четвертый, пятый, шестой и седьмой входы которого соединены соответственно с блоком постоянного запоминающего устройства 2, блоком автоматической локомотивной сигнализации 3, блоком приема информации от путевых устройств 4, измерителем пути 5, измерителем скорости 6, измерителем ускорения 7, а также измерителем эффективности тормозов 8, нечеткий контроллер 9, включающий блоки фуззификации 10, нечеткого вывода 11, базы правил 12 и дефуззификации 13, первый вход нечеткого контроллера 9 соединен с первым выходом блока программной скорости 1, блок дифференцирования 14. вход которого соединен со вторым выходом блока программной скорости 1, а выход - со вторым входом нечеткого контроллера 9, блок корректировки рассогласования по давлению в тормозных цилиндрах 15. первый вход которого соединен со вторым выходом блока программной скорости 1, второй вход - с выходом датчика давления в тормозных цилиндрах 16, а выход - с третьим входом нечеткого контроллера 9, коммуникационный канал связи 17, предназначенный для передачи в цифровом коде значения требуемого давления, связывающий выход нечеткого контролера 9 и первый вход блока регулирования давления в тормозных цилиндрах 18, второй вход которого связан с выходом датчика давления в тормозных цилиндрах 16, трехпозиционный релейный элемент 19, вход которого соединен с выходом блока регулирования давления в тормозных цилиндрах 18, а выход - со входом блока вентилей отпуска и торможения 20, выход которого подключен ко входу датчика давления в тормозных цилиндрах 16.
Рассмотрим работу устройства на примере конкретного выполнения способа автоматического управления электропневматическими тормозами поезда.
Блоком программной скорости 1 на основании информации о текущей скорости, расстоянии до места остановки или следующего ограничения скорости, кодах сигналов светофора, профиле пути на участке, действительном значении тормозного коэффициента, получаемой от блоков постоянного запоминающего устройства 2, автоматической локомотивной сигнализации 3, приема информации от путевых устройств 4, измерителя пути 5, измерителя скорости 6, измерителя ускорения 7, измерителя эффективности тормозов 8 в каждый момент времени рассчитывают программную скорость vп, соответствующую заданному замедлению, а также рассогласование программной vп и фактической v скоростей движения e1=vп-v. Блоком дифференцирования 14 вычисляют производную рассогласования de, а блоком корректировки рассогласования по давлению в тормозных цилиндрах 15 рассогласование корректируют на величину давления в тормозных цилиндрах по формуле:
e=e1+kPтц,
аналогично формуле (1). Полученные значения vп, е, de передают на вход нечеткого контроллера 9. С помощью блока фуззификации 10 их подвергают процедуре фуззификации с использованием заранее определенных термов лингвистических переменных «скорость», «текущее рассогласование», «производная рассогласования». Лингвистическая переменная «скорость» включает лингвистические термы «больше 20 км/ч», «около 20 км/ч», «около 7 км/ч». Лингвистические переменные «текущее рассогласование» и «производная рассогласования» имеют лингвистические термы «положительное», «примерно нуль», «отрицательное». При этом используют функции принадлежности, относящиеся к типу кусочно-непрерывных функций, их графики представлены на фиг.2-4. С помощью процедуры фуззификации определяют значения функций принадлежности каждого лингвистического терма. После выполнения процедуры фуззификации осуществляют процедуру нечеткого вывода с помощью блока нечеткого вывода 11 на основе базы правил, содержащихся в блоке базы правил 12 и включающих следующие правила:
Правило 1: ЕСЛИ v «больше 20 км/ч» И е «отрицательное» И de «отрицательное», ТО 
Правило 2: ЕСЛИ v «больше 20 км/ч» И е «положительное» И de «отрицательное», ТО 
Правило 3: ЕСЛИ v «около 20 км/ч» И е «отрицательное» И de «отрицательное», ТО 
Правило 4: ЕСЛИ v «около 20 км/ч» И е «отрицательное» И de «отрицательное», ТО 
Правило 5: ЕСЛИ v «около 7 км/ч» И е «отрицательное» И de «отрицательное», ТО 
Линейные функции f1(e), f2(e), f3(e), f4(e) служат для вычисление величин ступеней торможения и отпуска для различных ситуаций в зависимости от рассогласования.
Блоком дефуззификации 13 рассчитывают значение требуемой величины давления в тормозных цилиндрах на основании результатов нечеткого вывода. Для этого используются метод взвешенного среднего 

- торможение, если ΔP>b,
- отпуск, если ΔP<-b;
- перекрыша, если -b<ΔP<b,
где ΔP=Pз-Pтц - рассогласование давления в тормозных цилиндрах, 2b - зона нечувствительности. В результате обеспечивают реализацию требуемого давления в тормозных цилиндрах.
Блок корректировки рассогласования по давлению в тормозных цилиндрах позволяет при нахождении управляющего воздействия учесть уже созданное тормозное усилие, а блок дифференцирования -динамику изменения рассогласования. Нечеткий контроллер реализует нелинейный закон нахождения требуемого давления в тормозных цилиндрах, что способствует повышению качества управления. Наличие блока регулирования давления в тормозных цилиндрах, встроенного в модуль тормозного оборудования, и непосредственно управляющего трехпозиционным элементом, позволяет решить проблему задержек передачи команд от верхнего уровня (системы автоведения) к тормозной системе по каналам связи.
Таким образом, использование предложенного устройства для автоматического управления электропневматическими тормозами и способа его осуществления позволяет решить поставленную задачу, расширив функциональные возможности устройства для осуществления дистанционного управления тормозами поезда при реализации режима автоведения с обеспечением допустимого числа переключений режимов работы тормозного оборудования и плавного снижения скорости вплоть до остановки, что увеличивает его надежность, снижает износ и воздействия на конструкцию подвижного состава, не нарушает комфортность движения для пассажиров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство и способ автоматического управления электропневматическими тормозами пассажирских поездов в процессе реализации служебного торможения | 2022 |
|
RU2822934C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| БЛОК АДАПТИВНОГО УПРАВЛЕНИЯ ТОРМОЗОМ ТЕЛЕЖКИ | 2012 |
|
RU2524751C1 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2422314C1 |
| Устройство для автоматического управления торможением поезда | 1980 |
|
SU925709A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДА С ЛОКОМОТИВНОЙ ТЯГОЙ | 2003 |
|
RU2232692C1 |
| Устройство для автоматического управления торможением поезда | 1977 |
|
SU658017A1 |
| Система управления автоматическим тормозом железнодорожного транспорта и блок защиты отключения экстренного автоматического тормоза железнодорожного транспорта этой системы | 2021 |
|
RU2770430C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМИ ТОРМОЗАМИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2017 |
|
RU2715915C2 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444454C1 |

Изобретение относится к области построения бортовых систем автоматического управления подвижного состава железных дорог. Устройство автоматического управления электропневматическими тормозами поезда включает блоки программной скорости, постоянного запоминающего устройства, автоматической локомотивной сигнализации, приема информации от путевых устройств, измерители пути, скорости, ускорения, эффективности тормозов, трехпозиционный релейный элемент, вентили отпуска и торможения. Нечеткий контроллер соединен с блоком программной скорости, блоком дифференцирования, блоком корректировки рассогласования по давлению в тормозных цилиндрах, который также подключен к блоку программной скорости и к датчику давления в тормозных цилиндрах. Блок регулирования давления в тормозных цилиндрах соединен с выходом нечеткого контроллера с помощью коммуникационного канала связи и с датчиком давления в тормозных цилиндрах. Трехпозиционный релейный элемент соединен с блоком регулирования давления в тормозных цилиндрах и с блоком вентилей отпуска и торможения, который подключен к датчику давления в тормозных цилиндрах. Способ заключается в том, что на основании информации о текущей скорости, расстоянии до места остановки или следующего ограничения скорости, кодах сигналов светофора, профиле пути на участке, действительном значении тормозного коэффициента вычисляют программную скорость, определяют рассогласование программной и фактической скоростей движения, корректируют рассогласование с учетом величины давления в тормозных цилиндрах, выполняют управление вентилями отпуска и торможения тормозной системы поезда, рассчитывают производную рассогласования программной и фактической скоростей движения, с помощью нечеткого контроллера на основании процедуры нечеткого вывода определяют требуемое значение давления в тормозных цилиндрах, которое передают в блок регулирования давления в тормозных цилиндрах, проводят сравнение требуемого и фактического значений давлений, на основании которого выбирают режим работы тормозной системы. Достигается повышение надежности торможения. 2 н.п. ф-лы, 4 ил.
1. Устройство автоматического управления электропневматическими тормозами поезда, включающее блок программной скорости, первый, второй, третий, четвертый, пятый, шестой и седьмой входы которого соединены соответственно с блоком постоянного запоминающего устройства, блоком автоматической локомотивной сигнализации, блоком приема информации от путевых устройств, измерителем пути, измерителем скорости, измерителем ускорения, измерителем эффективности тормозов, а также трехпозиционный релейный элемент и вентили отпуска и торможения тормозной системы поезда, отличающееся тем, что дополнительно содержит блок корректировки рассогласования по давлению в тормозных цилиндрах, блок дифференцирования, нечеткий контроллер, включающий блоки фуззификации, нечеткого вывода, блок базы правил, а также блок дефуззификации, коммуникационный канал связи, блок регулирования давления в тормозных цилиндрах, датчик давления в тормозных цилиндрах, причем первый вход нечеткого контроллера соединен с первым выходом блока программной скорости, передающим текущую скорость от измерителя скорости, второй вход - с выходом блока дифференцирования, соединенным со вторым выходом блока программной скорости, передающим рассогласование текущей и программной скоростей, третий вход - с выходом блока корректировки рассогласования по давлению в тормозных цилиндрах, первый вход которого также подключен ко второму выходу блока программной скорости, а второй - к выходу датчика давления в тормозных цилиндрах, первый вход блока регулирования давления в тормозных цилиндрах соединен с выходом нечеткого контроллера с помощью коммуникационного канала связи, а второй вход - с выходом датчика давления в тормозных цилиндрах, вход трехпозиционного релейного элемента соединен с выходом блока регулирования давления в тормозных цилиндрах, а выход - с входом блока вентилей отпуска и торможения, выход которого подключен ко входу датчика давления в тормозных цилиндрах.
2. Способ автоматического управления электропневматическими тормозами поезда, заключающийся в том, что на основании информации о текущей скорости, расстоянии до места остановки или следующего ограничения скорости, кодах сигналов светофора, профиле пути на участке, действительном значении тормозного коэффициента вычисляют программную скорость, определяют рассогласование программной и фактической скоростей движения, корректируют рассогласование с учетом величины давления в тормозных цилиндрах, выполняют управление вентилями отпуска и торможения тормозной системы поезда, отличающийся тем, что рассчитывают производную рассогласования программной и фактической скоростей движения, с помощью нечеткого контроллера на основании процедуры нечеткого вывода определяют требуемое значение давления в тормозных цилиндрах, которое передают в блок регулирования давления в тормозных цилиндрах, проводят сравнение требуемого и фактического значений давлений, на основании которого выбирают режим работы тормозной системы.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| Вяжущее | 1976 |
|
SU585134A1 |
| 0 |
|
SU321556A1 | |
| Устройство для огневого обезвреживания жидких отходов | 1981 |
|
SU985586A1 |

