Изобретение относится к области управления сложными и быстродействующими технологическими процессами на предприятиях химической, нефтеперерабатывающей и нефтехимической промышленности, которые не удается описать системой линейных дифференциальных уравнений малого порядка, что вынуждает такие процессы представлять в виде вербальных или нелинейных моделей высокого порядка, реализованных программно или аппаратно на нечеткой микропроцессорной элементной базе.
К настоящему времени разработаны многочисленные модели нечетких регуляторов для управления сложными технологическими процессами (Круглов В.В., Дли М.И. Интеллектуальные информационные системы: компьютерная поддержка систем нечеткой логики и нечеткого вывода. - М.: Издательство физико-математической литературы, 2002. - 256 с.: ил., стр.73; Леоненков А.В. Нечеткое моделирование в среде MATLAB и fuzzy TECH. - СПб.: БХВ-Петербург, 2005. - 736 с.: ил., стр.225). Однако в целом ряде случаев применить их для управления быстродействующими технологическими процессами не представляется возможным из-за недопустимо большого времени отклика. Увеличение этого времени обусловлено тем, что первый вход автономного четкого сравнивающего устройства соединен с источником задающего сигнала, второй вход - с выходом датчика обратной связи, а его выход, на котором формируется сигнал рассогласования (ошибки), соединен с одним из входов фаззификатора, вследствие чего в известных нечетких регуляторах заданное и текущее значения регулируемой величины сравниваются дважды: вначале в автономном четком сравнивающем устройстве, а затем - в условной части продукционных правил блока нечеткого логического вывода. Дополнительным фактором увеличения времени отклика известный нечетких регуляторов является то обстоятельство, что в каждом цикле сканирования безусловно (независимо от текущего значения регулируемой величины) отрабатывается вся система продукционных правил, содержащаяся в блоке логического вывода. К тому же автономное четкое сравнивающее устройство обладает структурной избыточностью, которая, прежде всего, выражается в том, что в существующих нечетких регуляторах автономное четкое сравнивающее устройство предназначено для сравнения непрерывных функций, тогда как алгоритм нечеткого логического вывода оперирует термами лингвистических переменных, то есть не всеми, а только фиксированными значениями интерпретируемых функций.
Время отклика нечетких регуляторов еще увеличивается и из-за того, что в ряде структур существующих нечетких регуляторов выход сравнивающего устройства соединен с входами блоков дифференцирования и интегрирования, выходы которых соединены с отдельными входами фаззификатора и которые также увеличивают (особенно интегрирующие устройства) время отклика нечеткого регулятора. Кроме того, наличие первой производной от функции рассогласования в информационной среде нечеткого регулятора существенно сужает область применения нечетких регуляторов, так как сложные объекты управления, как правило, описываются не только функциями, не имеющими первую производную, но и представляются в виде вербальных моделей, мало что напоминающих о классических математических моделях.
Наиболее близким к заявленному техническому решению (прототип) является контроллер с нечеткой логикой и устройство для управления смешиванием горячей и холодной воды (Патент №JP3110442, кл. 7 G05D 23/13, опубл. в 2000 г.), содержащее четкое сравнивающее устройство, блоки дифференцирования и интегрирования, фаззификатор, блок нечеткого логического вывода, дефаззификатор, исполнительный орган, объект управления и датчик обратной связи.
Однако известный нечеткий регулятор обладает большим временем отклика, что в ряде случаев делает невозможным его применение для управления быстродействующими технологическими процессами, в математических моделях которых нет первой производной от функции рассогласования.
Предлагаемое изобретение решает техническую задачу снижения времени отклика нечеткого регулятора и расширения области его применения за счет преобразования регулируемой величины нечеткого регулятора в лингвистическую переменную, представленную термами «Нижнее допустимое», «Нижнее», «Номинальное», «Верхнее» и «Верхнее допустимое» с заданными функциями принадлежности и сравнения этих термов с текущим значением регулируемой величины в условной части продукционных правил нечеткого регулятора.
Указанная задача решается тем, что в структуре нечеткого регулятора с лингвистической обратной связью для управления технологическими процессами, состоящей из сравнивающего устройства, блока нечеткого логического вывода, дефаззификатора, исполнительного органа, объекта управления и датчика обратной связи, согласно изобретению выход датчика обратной связи соединен с первым входом фаззификатора, а его входы со второго по шестой соединены с автономными источниками, идентифицирующими верхнее допустимое, верхнее, номинальное, нижнее и нижнее допустимое значения регулируемой величины, что позволило сигналы задания и обратной связи сравнивать в нечетком формате в виде термов соответствующих лингвистических переменных и, таким образом, отказаться от четкого сравнивающего устройства (а значит, и от дублирующих процедур сравнения), и передать его функции условной части нечетких продукционных правил блока нечеткого логического вывода, вследствие чего из операционной среды предлагаемого нечеткого регулятора исключены такие параметры, как рассогласование (ошибка), ее первая производная и интеграл от функции рассогласования, что напрямую способствует снижению времени отклика предлагаемого нечеткого регулятора и расширению его области применения (отпадает надобность в существовании первой производной в математической модели объекта регулирования), при этом сравнивающее устройство реализовано в составе условной части продукционных правил блока нечеткого логического вывода так, что функции сравнения текущего значения регулируемой величины с термами входной лингвистической переменной и генерирования соответствующих текущей ситуации управляющих воздействий в виде термов выходной лингвистической переменной по результатам упомянутого сравнения выполняются последовательно друг за другом в пределах каждого продукционного правила, а для дополнительного снижения времени отклика нечеткого регулятора система продукционных правил построена так, что в любой момент времени истинной является условная часть только в одном продукционном правиле и в начало системы продукционных правил помещены правила с наибольшей частотой срабатывания.
На фиг.1 изображена структурная схема нечеткого регулятора с лингвистической обратной связью для управления технологическими процессами.
Схема нечеткого регулятора с лингвистической обратной связью для управления технологическими процессами содержит: фаззификатор 1, блок нечеткого логического вывода 2, дефаззификатор 3, исполнительный орган 4, объект управления 5 и датчик отрицательной обратной связи 6. Для параметров на фиг.1 введены следующие обозначения: b - текущее значение управляющей величины, р - текущее значение регулируемой величины,  - верхнее допустимое значение регулируемой величины р, Рверх - верхнее значение регулируемой величины р, Рном - номинальное значение регулируемой величины р, Рниж - нижнее значение регулируемой величины p,
- верхнее допустимое значение регулируемой величины р, Рверх - верхнее значение регулируемой величины р, Рном - номинальное значение регулируемой величины р, Рниж - нижнее значение регулируемой величины p,  - нижнее допустимое значение регулируемой величины p.
- нижнее допустимое значение регулируемой величины p.
Выход фаззификатора 1 соединен с входом блока нечеткого логического вывода 2, выход блока нечеткого логического вывода 2 соединен с входом блока 3, выход дефаззификатора 3 соединен с входом исполнительного органа 4, выход исполнительного органа 4 соединен с входом объекта управления 5, выход объекта управления 5 соединен с входом датчика обратной связи 6, выход датчика обратной связи 6 соединен с первым входом фаззификатора 1.
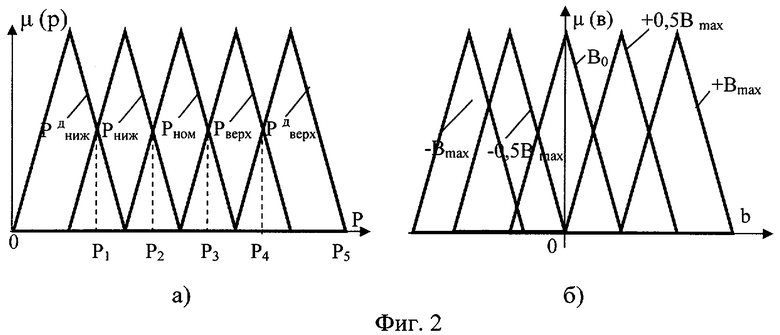
На фиг.2,а представлены функции принадлежности термов  Рверх, Рном, Рниж,
Рверх, Рном, Рниж,  регулируемой величины р, представленной в виде лингвистической переменной Р, а на фиг.2,б - функции принадлежности термов {-Вmax, -0,5Вmax, В0, +0,5Вmax, +Вmax,) управляющей величины b, представленной в виде лингвистической переменной В. Функции принадлежности лингвистических переменных хранятся в базе данных нечеткого регулятора. Принципиальных ограничений на количество термов лингвистических переменных на фиг.2 нет, однако в целях сокращения объема вычислений рекомендуется ограничивать их количество до семи. На вход фаззификатора 1 подаются в четком формате следующие величины: текущее значение регулируемой величины р (сигнал обратной связи); верхнее допустимое значение р - ; верхнее значение р - Pверх; номинальное значение р - Рном; нижнее значение р - Рниж; нижнее допустимое значение p -
регулируемой величины р, представленной в виде лингвистической переменной Р, а на фиг.2,б - функции принадлежности термов {-Вmax, -0,5Вmax, В0, +0,5Вmax, +Вmax,) управляющей величины b, представленной в виде лингвистической переменной В. Функции принадлежности лингвистических переменных хранятся в базе данных нечеткого регулятора. Принципиальных ограничений на количество термов лингвистических переменных на фиг.2 нет, однако в целях сокращения объема вычислений рекомендуется ограничивать их количество до семи. На вход фаззификатора 1 подаются в четком формате следующие величины: текущее значение регулируемой величины р (сигнал обратной связи); верхнее допустимое значение р - ; верхнее значение р - Pверх; номинальное значение р - Рном; нижнее значение р - Рниж; нижнее допустимое значение p -  . В зависимости от текущего значения регулируемой величины р фаззификатор преобразует это значение в нечеткий формат - в один из термов , Pверх, Рном, Рниж, лингвистической переменной Р, которой присваивается имя регулируемой величины.
. В зависимости от текущего значения регулируемой величины р фаззификатор преобразует это значение в нечеткий формат - в один из термов , Pверх, Рном, Рниж, лингвистической переменной Р, которой присваивается имя регулируемой величины.
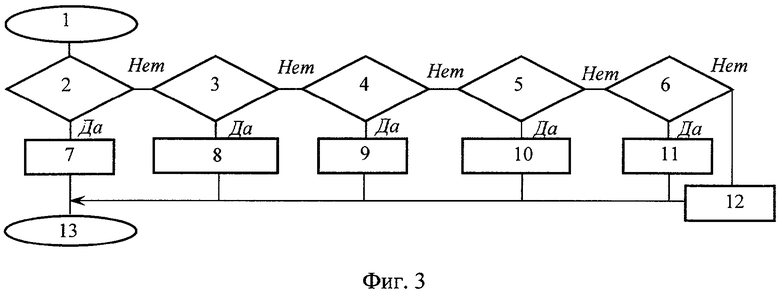
На фиг.3 представлена логическая схема алгоритма блока нечеткого логического вывода 2 нечеткого регулятора с лингвистической обратной связью для управления технологическими процессами. Логическая схема алгоритма блока нечеткого логического вывода 2 нечеткого регулятора с лингвистической обратной связью для управления технологическими процессами состоит из следующих операторов: 1 - начало и 13 - окончание алгоритма; (2÷6) - операторы условного перехода, проверяющие соответственно следующие условия:  Р=Рниж,
Р=Рниж,  Р=Рверх, Р≤Рном; (7÷11) - операторы присваивания, присваивающие лингвистической переменной В соответственно значения: +Вmax, +0,5Вmax, -Вmax, -0,5Вmax, В0; 12 - исполняемый оператор, сигнализирующий о выходе регулируемой величины за допустимые пределы.
Р=Рверх, Р≤Рном; (7÷11) - операторы присваивания, присваивающие лингвистической переменной В соответственно значения: +Вmax, +0,5Вmax, -Вmax, -0,5Вmax, В0; 12 - исполняемый оператор, сигнализирующий о выходе регулируемой величины за допустимые пределы.
Выход оператора 1 соединен с входом оператора 2. Выход «Нет» оператора 2 соединен с входом оператора 3, а его выход «Да» - с входом оператора 7. Выход «Нет» оператора 3 соединен с входом оператора 4, а его выход «Да» - с входом оператора 8. Выход «Нет» оператора 4 соединен с входом оператора 5, а его выход «Да» - с входом оператора 9. Выход «Нет» оператора 5 соединен с входом оператора 6, а его выход «Да» - с входом оператора 10. Выход «Нет» оператора 6 соединен с входом оператора 12, а его выход «Да» - с входом оператора 11. Выходы операторов (7÷12) соединены с входом оператора 13. В любой момент времени истинным является условие только в одном из операторов 2÷6 схемы на фиг.3. В этом ее принципиальное отличие от аналогичных схем существующих нечетких регуляторов.
Система продукционных правил блока нечеткого логического вывода 2, реализующая логическую схему алгоритма на фиг.3, имеет следующий вид:
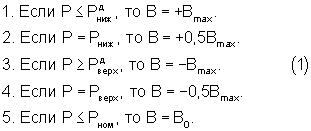
Система (1) предлагаемого нечеткого регулятора построена так, что в любой момент времени условная часть истинна только в одном продукционном правиле и ложна во всех остальных правилах этой системы. Вследствие этого в каждом цикле сканирования системы нечетких правил обрабатывается не вся система (это имеет место в известных нечетких регуляторах), а только та ее часть, которая в системе (1) расположена выше сработавшего в текущем цикле сканирования продукционного правила.
Нечеткий регулятор с лингвистической обратной связью для управления технологическими процессами функционирует следующим образом. На входах 2÷6 фаззификатора устанавливается четкое значение величины сигналов, идентифицирующих следующие фиксированные значения регулируемой величины:  Рверх, Рном, Рниж,
Рверх, Рном, Рниж,  При этом предполагается, что текущее значение регулируемой величины находится в пределах допустимых значений.
При этом предполагается, что текущее значение регулируемой величины находится в пределах допустимых значений.
Микропроцессор с заданной периодичностью непрерывно сканирует систему правил (1). В зависимости от четкого текущего значения регулируемой величины р фаззификатор преобразует его в один из термов лингвистической переменной Р. Например, если значение р (фиг.2,а) находится в диапазоне 0÷p1, то его четкое значение преобразуется в терм Рниж. Если р2>р>p1, то р преобразуется в терм Рниж. Аналогично, при условии р2>р>р3 р преобразуется в терм Рном, при р4>р>р3 - в терм Рверх, а при р5>р>р4 - в терм . Таким образом, в любой момент времени с выхода фаззификатора на вход блока нечеткого логического вывода 2 поступает только один терм, причем тот, который идентифицирует четкое текущее значение регулируемой величины р в данном цикле сканирования базы правил (1). Поскольку в этой системе в любой момент времени условная часть истинна только в одном продукционном правиле и ложна во всех остальных правилах этой системы, то в каждом цикле сканирования системы нечетких правил обрабатывается не вся система (это имеет место в известных нечетких регуляторах), а только та ее часть, которая в системе (1) расположена выше сработавшего в текущем цикле сканирования продукционного правила. Поэтому в каждом цикле сканирования микропроцессор будет отрабатывать не всю схему на фиг.3 (это имеет место в классических нечетких регуляторах), а только ту ее часть, которая расположена левее условного оператора, имеющего истинное условие в данный момент времени.
Если в системе продукционных правил (1) сработало первое продукционное правило, то текущее значение регулируемой величины меньше или равно предельно допустимому значению. Поэтому управляющему воздействию b в такой ситуации присваивается значение терма +Вmax, при котором исполнительный орган 4 воздействует на объект управления таким образом, что происходит интенсивное увеличение значения регулируемой величины. При этом в рассматриваемом цикле сканирования системы (1) микропроцессор отработает только первое правило, а правила 2÷5 пропускаются, после чего приступает к выполнению следующего цикла сканирования. На логической схеме алгоритма (фиг.3) в этой ситуации последовательно отрабатываются блоки 1, 2, 7 и 13.
Если в системе правил (1) сработало второе продукционное правило, то текущее значение регулируемой величины равно своему нижнему значению. Поэтому управляющему воздействию b в такой ситуации присваивается значение терма +0,5Вmax, при котором исполнительный орган 4 воздействует на объект управления таким образом, что происходит плавное увеличение значения регулируемой величины. При этом в рассматриваемом цикле сканирования системы (1) микропроцессор отработает первое и второе правила, а правила 3÷5 пропускает, после чего приступает к выполнению следующего цикла сканирования. Причем в первом правиле анализируется только условная часть. На логической схеме алгоритма (фиг.3) в этой ситуации последовательно отрабатываются блоки 1, 2, 3, 8 и 13.
Если в системе правил (1) сработало третье продукционное правило, то текущее значение регулируемой величины больше или равно своему верхнему предельно допустимому значению. Поэтому управляющему воздействию b в такой ситуации присваивается значение терма -Вmax, при котором исполнительный орган 4 воздействует на объект управления 5 таким образом, что происходит интенсивное снижение значения регулируемой величины. При этом в данном цикле сканирования системы (1) микропроцессор отработает первое, второе и третье, а четвертое и пятое правила пропускает, после чего приступает к выполнению следующего цикла сканирования. Причем в первом и втором правиле анализируется только условная часть. На логической схеме алгоритма (фиг.3) в этой ситуации последовательно отрабатываются блоки 1, 2, 3, 4, 9 и 13.
Если в системе правил (1) сработало четвертое продукционное правило, то текущее значение регулируемой величины равно своему верхнему значению. Поэтому управляющему воздействию b в такой ситуации присваивается значение терма -0,5Вmax, при котором исполнительный орган 4 воздействует на объект управления 5 таким образом, что происходит медленное снижение значения регулируемой величины. При этом в данном цикле сканирования системы (1) микропроцессор отработает первые четыре правила, а пятое правило пропустит, после чего приступает к выполнению следующего цикла сканирования. Причем в первом, втором и третьем правилах анализируется только условная часть. На логической схеме алгоритма (фиг.3) в этой ситуации последовательно отрабатываются блоки 1, 2, 3, 4, 5, 10 и 13.
Наконец, если в системе правил (1) сработало пятое продукционное правило, то текущее значение регулируемой величины меньше или равно своему номинальному значению. Поэтому управляющему воздействию b в такой ситуации присваивается значение терма В0, при котором исполнительный орган 4 воздействует на объект управления 5 таким образом, что происходит поддержание значения регулируемой величины на номинальном уровне. При этом в данном цикле сканирования системы (1) микропроцессор отработает все пять правил, после чего приступает к выполнению следующего цикла сканирования. Причем в первых четырех правилах анализируется только условная часть. На логической схеме алгоритма (фиг.3) в этой ситуации последовательно отрабатываются блоки 1, 2, 3, 4, 5, 6, 11 и 13.
В блоке нечеткого логического вывода 2 происходит непрерывное сканирование системы правил (1). Из-за того, что в системе (1) в любой момент времени имеется только одно правило с истинной условной частью, система (1) сканируется не полностью, а только до продукционного правила с истинной условной частью, после чего микропроцессор переходит к отработке следующего цикла сканирования. Это приводит к снижению времени отклика предлагаемого нечеткого регулятора. Причем этот эффект проявится в большей степени, если продукционные правила с наибольшей частотой срабатывания поместить в начало системы правил (1).
В случае срабатывания (истинности условной части) продукционного правила выполняется ее заключительная часть и на выход блока нечеткого логического вывода 2 выдается соответствующий терм выходной лингвистической переменной b и на этом текущий цикл сканирования системы правил (1) заканчивается. В итоге продукционные правила, расположенные ниже сработавшего правила, не выполняются. В этом принципиальная особенность предлагаемого нечеткого регулятора по сравнению с известными, благодаря которой обеспечивается снижение времени отклика. Например, если в системе (1) сработало правило 3, то выходной лингвистической переменной В присваивается значение терма B0, после чего процессор без отработки правил 4 и 5 (они отрабатывались бы в классических нечетких регуляторах) сразу переходит к выполнению следующего цикла сканирования. Хотя в системе (1) правила (в данном случае правила 1 и 2), расположенные до третьего, процессором в данном цикле сканирования были отработаны, но без изменения значения выходной лингвистической переменной, то есть заключительная часть этих правил процессором не отрабатывалась.
Таким образом, в результате непрерывного сканирования системы продукционных правил (1) и вследствие того, что в ней в любой момент времени имеется только одно продукционное правило, условная часть которого истинна, значение регулируемой величины р в предлагаемом нечетком регуляторе с высоким быстродействием и без четкого сравнивающего устройства поддерживается около номинального уровня.
Результат нечеткого логического вывода в виде одного из термов выходной лингвистической переменной В (фиг.2,б) с выхода блока 2 подается на вход дефаззификатора 3, в котором преобразуется в четкий формат, например, методом максимума и передается на исполнительный орган 4 для совершения управляющих воздействий на объект управления 5.
Использование данного изобретения позволит расширить область применения, а также снизить время отклика существующих нечетких регуляторов, используемых для управления сложными быстродействующими технологическими объектами с быстро протекающими процессами, которые описываются нелинейными интегродифференциальными уравнениями высокого порядка. Такие системы управления находят все большее применение в машиностроении (станкостроение, авиастроение, робототехника, космическая и автомобильная отрасли), пищевой, нефтяной и газовой промышленности в тех случаях, когда объект управления не имеет приемлемой математической модели.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧЕТКИЙ ЛОГИЧЕСКИЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 2010 |
|
RU2445669C2 |
| АДАПТИВНЫЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ЛОГИЧЕСКИЙ РЕГУЛЯТОР, РАБОТАЮЩИЙ В УСЛОВИЯХ НЕЧЕТКО ЗАДАННОЙ ИНФОРМАЦИИ | 2014 |
|
RU2579987C2 |
| Многопараметрический нечеткий процессор для автоматических регуляторов и способ синтеза управляющего сигнала | 2017 |
|
RU2649791C1 |
| СПОСОБ И УСТРОЙСТВО СТАБИЛИЗАЦИИ ПРОЦЕССА РЕЗАНИЯ НА ТОКАРНОМ ОБОРУДОВАНИИ С ЧПУ | 2010 |
|
RU2465116C2 |
| СПОСОБ ОЦЕНКИ ПСИХОФИЗИЧЕСКОГО СОСТОЯНИЯ СПЕЦИАЛИСТА | 2021 |
|
RU2799620C2 |
| Способ оценки мышечной усталости на основе контроля паттернов синергии и устройство для его осуществления | 2021 |
|
RU2766764C1 |
| СПОСОБ СУШКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2020 |
|
RU2743979C1 |
| СБОРНАЯ ПРОСТРАНСТВЕННАЯ ЖЕЛЕЗОБЕТОННАЯ ФУНДАМЕНТНАЯ ПЛАТФОРМА НА МНОГОЛЕТНЕМЕРЗЛОМ ГРУНТЕ | 2022 |
|
RU2784509C1 |
| СПОСОБ СУШКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2020 |
|
RU2751325C1 |
| СПОСОБ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ С ПОДДЕРЖАНИЕМ РАБОЧЕЙ ТОЧКИ ИНЕРЦИОННОГО ОБЪЕКТА НА ЗАДАННОМ РАССТОЯНИИ ОТ ЭКСТРЕМУМА | 2005 |
|
RU2298821C2 |
Изобретение относится к области управления технологическими процессами. Технический результат заключается в снижении времени отклика и расширении области применения нечетких регуляторов. Нечеткий регулятор включает фаззификатор с шестью входными каналами, блок нечеткого логического вывода, состоящий из базы правил, базы функций принадлежности и программно реализованного нечеткого сравнивающего устройства, дефаззификатор, исполнительный орган, объект управления и датчик обратной связи. В перечисленной последовательности они соединены в контур. При этом вход датчика обратной связи соединен с выходом объекта управления, а его выход - с одним из входов фаззификатора. Остальные входы фаззификатора по отдельности соединены с автономными источниками сигналов, идентифицирующих следующие фиксированные значения регулируемой величины: верхнее допустимое, верхнее, номинальное, нижнее и нижнее допустимое. Сравнивающее устройство реализовано в составе условной части продукционных правил блока нечеткого логического вывода. Изобретение обеспечивает автоматическое управление сложными быстродействующими технологическими процессами, не имеющими классических математических моделей, постоянная времени которых соизмерима или меньше времени отклика известных нечетких регуляторов. 3 з.п. ф-лы, 3 ил.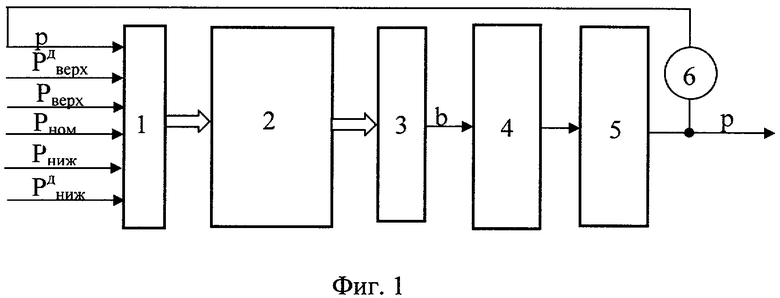
 («Верхнее допустимое»), Рверх («Верхнее»), Рном («Номинальное»), Рниж («Нижнее») и
(«Верхнее допустимое»), Рверх («Верхнее»), Рном («Номинальное»), Рниж («Нижнее») и  («Нижнее допустимое»), а сравнивающее устройство реализовано в составе условной части продукционных правил блока нечеткого логического вывода, причем система продукционных правил блока нечеткого логического вывода имеет следующий вид:
(«Нижнее допустимое»), а сравнивающее устройство реализовано в составе условной части продукционных правил блока нечеткого логического вывода, причем система продукционных правил блока нечеткого логического вывода имеет следующий вид: , то В=+Вmax;
, то В=+Вmax; , то В=-Вmax;
, то В=-Вmax;
| JP 4069714 А, 04.03.1992 | |||
| СПОСОБ ФОРМИРОВАНИЯ НЕЧЕТКОГО УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ, УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ, СПОСОБ УПРАВЛЕНИЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 1990 |
|
RU2110826C1 |
| US 6310454 А, 30.10.2001 | |||
| БОРЦОВ Ю.А | |||
| и др | |||
| Синтез адаптивного нечеткого регулятора электропривода | |||
| - Электричество, 1997, №11, с.27-29, рис.1. | |||

