Настоящее изобретение относится к поверхностям управления самолетом, более конкретно к системе приведения в действие поверхностей управления самолетом таким образом, что максимальная механическая эффективность исполнительного механизма достигается тогда, когда поверхность управления также достигает своего максимально отклоненного положения.
Обычная конструкция крыла самолета включает основную поверхность крыла или аэродинамический профиль, имеющий переднюю кромку и заднюю кромку, причем на передней и задней кромках расположены поверхности управления. Примерами поверхностей управления могут служить поверхности закрылков и элеронов, причем закрылки служат для увеличения подъемной силы крыла, а элероны используются для управления по осевому крену. Закрылки на каждом крыле действуют синхронно, увеличивая подъемную силу крыла за счет увеличения кривизны его профиля. Для сравнения, элероны отклоняются в противоположные стороны для увеличения подъемной силы одного крыла и одновременного уменьшения подъемной силы другого крыла для создания момента крена. Подобно этому, секции руля высоты горизонтального хвостового оперения шарнирно подвешены на неподвижной части хвоста для изменения подъемной силы и обеспечения управления по тангажу.
Когда закрылок или элерон приводится в действие, поверхность управления поворачивается относительно задней кромки крыла. Закрылки или элероны, как элементы управления, обычно представляют собой жесткие конструкции, при повороте сохраняющие свою конфигурацию. Поэтому в области шарнирного соединения обычной поверхности управления появляются щели или резкие изменения контура. Такая щель приводит к увеличению сопротивления и снижению эффективности элемента управления. Кроме того, когда элементы управления поворачиваются, формируются разрывы между концами поворачивающейся поверхности управления и примыкающими неподвижными частями поверхности крыла.
Имеется большое количество запатентованных конструктивных решений, служащих типичными примерами текущего состояния известного уровня техники как в отношении приводных механизмов, так и в отношении необходимости минимизировать влияние разрывов, возникающих между поверхностью управления и поверхностью крыла или неподвижной аэродинамической поверхностью, с которой с возможностью движения соединена поверхность управления. Например, патенты США №№2670909 (Replogle) и 5161757 (Large) описывают приводные механизмы для поверхности управления самолетом в форме закрылка. Этот закрылок одновременно поворачивается и выдвигается относительно основной аэродинамической поверхности. В каждом приведенном примере в приводном механизме использован роговой компенсатор или коленчатый рычаг, расположенный внутри корпуса закрылка и поворачивающийся вокруг оси, перпендикулярной к задней кромке крыла. Однако в каждом случае запатентованный механизм работает только по направлению вниз.
Патенты США №№3944170 и 4286761 (Musgrove) описывают эксцентрический привод, обеспечивающий повороты корпуса закрылка.
Патент США №5222699 (Albach и др.), переуступленный правопреемнику настоящего изобретения, описывает элемент управления изменяемой геометрии, которая содержит эластомерные переходные секции между внутренней и внешней кромками элемента управления изменяемой геометрии и собственно крылом. Переходные секциивключают толстые слоиэластомерного материала с увеличенными отверстиями, и в эти увеличенные отверстия помещены стержни. Часть стержней прикреплена к основной части крыла, а другая часть стержней прикреплена к элементу управления.
Патент США №3109613 (Bryant и др.) описывает устройство для изменения кривизны профиля, которое изменяет кривизну профиля всей задней части конструкции крыла. Это позволяет создать "бесшовную" линию шарнирного поворота благодаря использованию стыка со скользящим уплотнением, но не обеспечивает неразрывности кромок.
Знание известного уровня техники в данной области позволило разработать и осуществить на практике настоящее изобретение.
Настоящее изобретение относится к системе управления полетом, обеспечивающей максимизацию механической эффективности, когда нагрузка от воздушного потока на аэродинамическую поверхность также достигает максимума. Элемент управления установлен на крыле для поворотного перемещения вокруг оси, ориентированной вдоль размаха крыла, в диапазоне положений от нейтрального положения, в котором нагрузка на него от воздушного потока минимальна, до отклоненного вверх положения, в одном случае, и до отклоненного вниз положения, в другом случае, в которых нагрузка от воздушного потока на поверхность элемента управления максимальна как в отклоненном вверх положении, так и в отклоненном вниз положении. Исполнительный механизм для перемещения элемента управления между отклоненным вверх и отклоненным вниз положениями включает ротор, установленный на неподвижной части крыла для поворота вокруг оси, ориентированной вдоль хорды крыла, и имеет коленчатый элемент с оконечностью, смещенной от оси вращения. Оконечность коленчатого элемента с возможностью скольжения соединена с направляющей, расположенной, по существу, в плоскости крыла, и привод служит для вращения ротора вокруг оси вращения и, благодаря скользящему соединению оконечности коленчатого элемента с направляющей, таким образом, перемещает элемент управления между отклоненным вверх и отклоненным вниз положениями.
Основной отличительный признак настоящего изобретения состоит в том, что получена система управления полетом для самолета, благодаря которой достигается максимальная механическая эффективность приводного механизма для поверхности элемента управления самолета, когда поверхность элемента управления также находится в максимально отклоненном положении.
Другим отличительным признаком настоящего изобретения является получение такой системы управления полетом, согласно которой конструкция крыла самолета включает элемент управления, который обеспечивает изменяемую кривизну профиля крыла с одновременным устранением любого разрыва или резкого изменения профиля между задней кромкой крыла и примыкающими кромками элемента управления.
Другие и дополнительные признаки и преимущества изобретения будут понятны при ознакомлении с нижеследующим описанием, данным в сочетании с прилагаемыми чертежами. Следует понимать, что нижеследующее общее описание и подробное описание имеют пояснительный и иллюстративный характер и не ограничивают объем защиты изобретения. Прилагаемые чертежи, включенные в это описание и составляющие его часть, иллюстрируют один из вариантов осуществления изобретения и, совместно с описанием, служат для пояснения принципов изобретения в общих чертах. Во всем описании одинаковые ссылочные номера относятся к одинаковым деталям.
Указанные выше аспекты и другие признаки настоящего изобретения раскрыты в нижеследующем описании, данном в связи с сопутствующими чертежами, на которых:
фиг.1 изображает вид в перспективе самолета, на котором применена система управления полетом согласно настоящему изобретению;
фиг.2 изображает вид в перспективе части фиг.1;
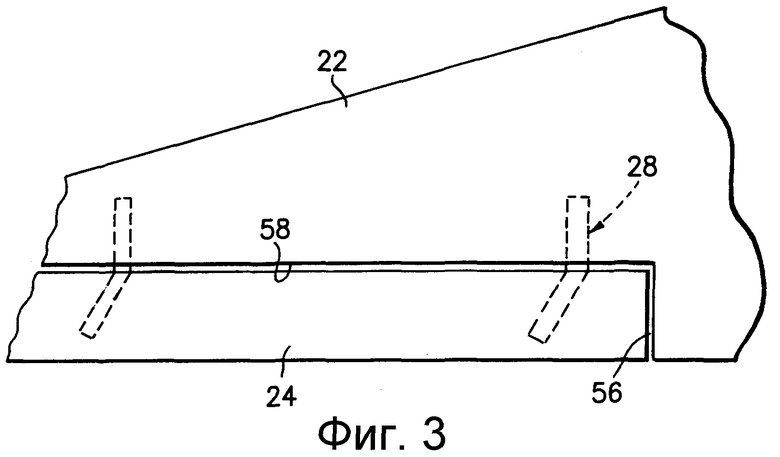
фиг.3 изображает вид сверху части фиг.1;
фиг.4 изображает вид сверхув плане с частичным сечением и с удалением некоторых деталей, иллюстрирующий более подробно внутреннее устройство узла, показанного на фиг.3;
фиг.5 изображает вид поперечного сечения, выполненного по линии 5-5 на фиг.1;
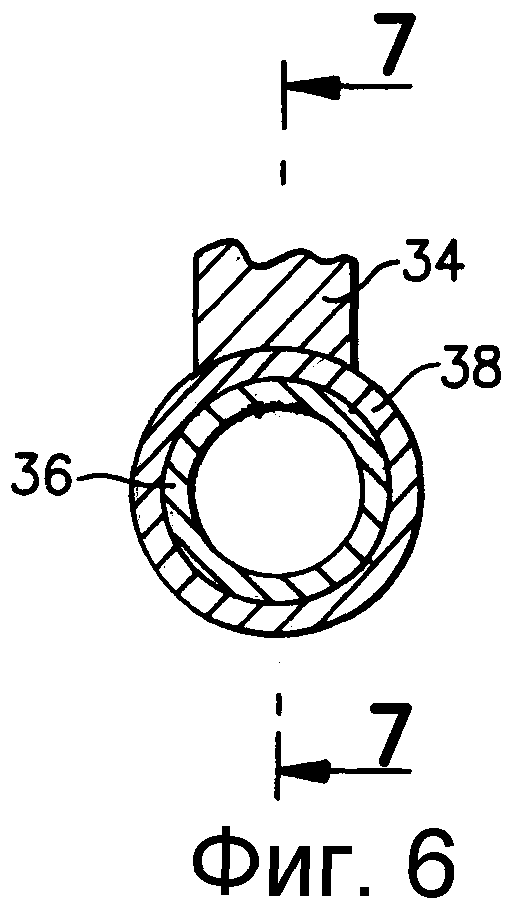
фиг.6 изображает вид поперечного сечения, выполненного по линии 6-6 на фиг.4;
фиг.7 изображает вид сечения, выполненного по линии 7-7нафиг.6;
фиг.8 изображает вид поперечного сечения, выполненного по линии 8-8 на фиг.4;
фиг.9А, 9В и 9С изображают подробные схематические вертикальные виды сбоку, иллюстрирующие последовательные положения компонентов известной системы управления полетом;
фиг.10, 11 и 12 изображают подробные схематические виды в плане, иллюстрирующие последовательные положения основного компонента согласно изобретению;
фиг.10А, 11А и 12А изображают подробные схематические вертикальные виды, иллюстрирующие соответствующие последовательные положения основного компонента, показанного на фиг.10, 11 и 12;
фиг.13 изображает подробный перспективный вид, в целом подобный изображенному на фиг.2, но иллюстрирующий другой вариант осуществления изобретения;
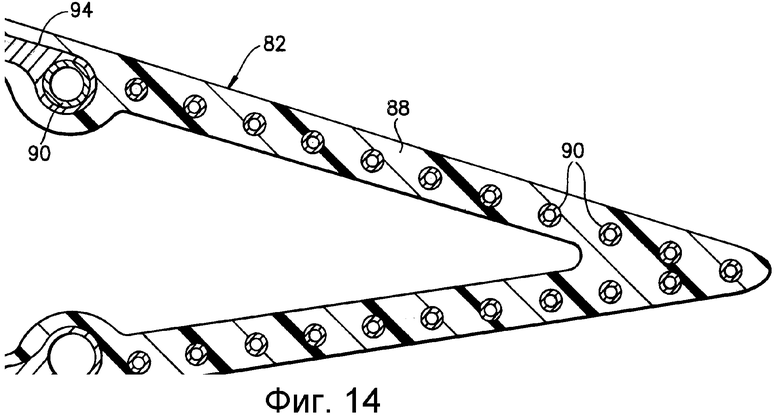
фиг.14 изображает вид поперечного сечения, выполненного по линии 14-14 на фиг.13;
фиг.15 изображает вид сверху в плане, в целом подобный показанному на фиг.4, но иллюстрирующий другой вариант осуществления изобретения;
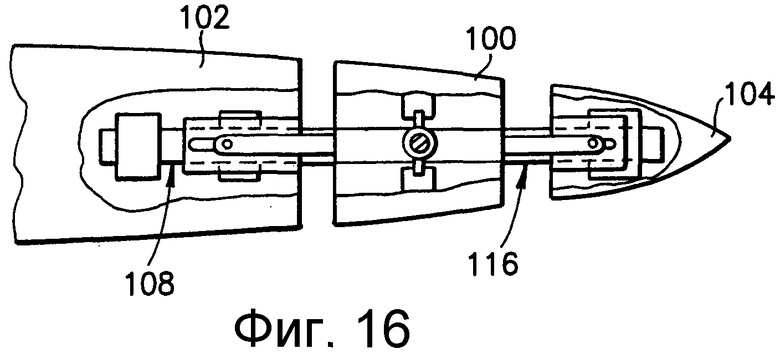
фиг.16 изображает вертикальный вид сбоку варианта осуществления изобретения, показанного на фиг.15, в его нейтральном положении; и
фиг.17 изображает вертикальный вид сбоку, подобный показанному на фиг.16, но иллюстрирующий компоненты в отклоненном вниз положении.
На фиг.1 показан вид в перспективе самолета 20, содержащего признаки настоящего изобретения. Хотя настоящее изобретение будет описано со ссылками на варианты его осуществления, изображенные на фигурах, следует понимать,что данное изобретение может быть осуществлено во многих других вариантах. Кроме того, могут быть применены любые пригодные размеры, конфигурация или тип элементов или материалов.
При рассмотрении фиг.1 и обращении также к фиг.2, 3, 4 и 5 отметим, что в обычном исполнении самолет 20 включает крыло или аэродинамический профиль 22 и элемент 24 управления. Элемент 24 управления смонтирован на крыле так, что он может поворачиваться вокруг оси, ориентированной вдоль размаха крыла, в диапазоне положений от нейтрального (показанного сплошной линией) положения, которое можно видеть на фиг.5, в котором нагрузка на его поверхность от воздушного потока минимальна, и до отклоненного вверх (показанного прерывистой линией) положения, в одном случае, и отклоненного вниз (показанного прерывистой линией) положения, в другом случае. Нагрузка от воздушного потока на поверхность элемента управления как в отклоненном вверх положении, так и в отклоненном вниз положении имеет номинальное максимальное значение.
Исполнительный механизм 26 (фиг.4) служит для перемещения элемента 24 управления между отклоненным вверх и отклоненным вниз положениями. Исполнительный механизм 26 включает пару разнесенных в направлении размаха крыла роторов 28, каждый из которых необходимым образом смонтирован на крыле 22 с возможностью вращения вокруг оси 30, ориентированной вдоль хорды крыла, и имеет коленчатый элемент 32 с оконечностью 34, смещенной от оси вращения в направлении размаха крыла. На элементе 24 управления необходимым образом закреплена удлиненная направляющая штанга 36, расположенная так, что она соединяется с ротором 28 и находится, по существу, в одной плоскости с плоскостью управления. Оконечность 34 коленчатого рычага 32 с возможностью вращения прикреплена к муфте 38, которая с возможностью скольжения и вращения соединена с наружной периферийной поверхностью направляющей штанги. Эта конструкция более подробно представлена на фиг.6 и 7. В предпочтительном варианте осуществления изобретения направляющая штанга 36 имеет форму трубы круглого сечения, и муфта 38 может скользить вдоль этой трубы.
На фиг.4 показано, что на крыле 22 расположены разнесенные в направлении хорды крыла подшипники 44, 46 для удерживания ротора 28 с возможностью его вращения вокруг оси 30 вращения. Исполнительный механизм 26 также включает вращающийся привод 48, например, для вращения каждого ротора 28 вокруг его оси 30 вращения. Это осуществляется при помощи приводного вала 50, предусмотренного для каждого ротора 28. Как лучше видно на фиг.8, цилиндрическое зубчатое колесо 52 закреплено соосно на роторе 28, и червячное колесо 54 установлено как единое целое с приводным валом 50 соосно с ним так, что оно как ведущее колесо входит в зацепление с цилиндрическим зубчатым колесом 52.
Благодаря соединению с возможностью скольжения муфты 38 на оконечности 34 коленчатого элемента 32 с направляющей штангой 36 и с только что описанным узлом, когда вращающийся привод 48 начинает работать, элемент 24 управления перемещается между отклоненными вверх и вниз положениями, показанными на фиг.5.
Конечно, для того, чтобы исполнительный механизм 26 надлежащим образом выполнял свои функции, необходимо, чтобы элемент 24 управления был правильно смонтирован на крыле 22. Таким образом, как хорошо видно на фиг.2 и 3, крыло имеет вырез 56 для надлежащего приема элемента управления. Часть выреза 56 образована проходящей в направлении размаха крыла монтажной поверхностью 58, обращенной к элементу 24 управления. Система управления полетом для самолета 20 включает также шарнирный механизм 60, позволяющий сообщать поворотное движение элемента 24 управления для отклонения его в верхнее и нижнее положения. Шарнирный механизм 60 включает пару разнесенных в направлении размаха крыла первых шарнирных элементов 62, смонтированных на монтажной поверхности 58 и отступающих от нее и имеющих в целом удлиненные сквозные отверстия 64, находящиеся, по существу, в плоскости крыла 22. Пара разнесенных в направлении размаха крыла вторых шарнирных элементов 66 подобным образом смонтирована на элементе 24 управления и отступает от него в направлении монтажной поверхности 58. Каждый из вторых шарнирных элементов 66 включает составляющий с ним единое целое монтажный штифт 68 для введения в зацепление с удлиненным отверстием 64 соответствующего одного из первых шарнирных элементов. Удлиненные отверстия 64 в шарнирных элементах 62 допускают необходимое движение элемента 24 управления по направлению хорды крыла относительно поверхности крыла 22, в частности шарнирного элемента 66 и штифта 68, когда элемент управления перемещается между нейтральным положением и либо отклоненным вверх, либо отклоненным вниз положениями.
Как уже было показано на фиг.4, направляющая штанга 36 имеет продольную ось, которая проходит, по существу, по направлению размаха крыла в элементе 24 управления. При такой конструкции могут быть получены отклонения поверхности элемента 24 управления вверх и вниз, показанные на фиг.5, при заданных поворотах роторов 28 вокруг осей 30 вращения.
С применением описанной конструкции главное преимущество, предлагаемое изобретением, относится к тому факту, что механическая эффективность, обеспечиваемая исполнительным механизмом 26, максимальна, когда нагрузка, прилагаемая воздушным потоком к поверхности элемента 24 управления, также доходит до максимума. Для пояснения этого явления теперь сначала обратимся к фиг.9А, 9В и 9С, которые схематически иллюстрируют обычное приведение в действие элемента управления. В этом случае, обычное крыло 70 снабжено связанным с ним обычным элементом 72 управления, который перемещается между отклоненным вверх (фиг.9А), нейтральным (фиг.9В) и отклоненным вниз (фиг.9С) положениями в результате работы привода 74. Плечо рычага в нейтральном или неотклоненном положении элемента 72 управления, как можно видеть на фиг.9В, обозначено символом МА0. Плечо рычага в отклоненном вверх положении, показанном на фиг.9А, обозначено символом МАUP и в отклоненном вниз положении, показанном на фиг. 9С, обозначено символом МАDOWN. Таким образом, видно, что МА0, как правило, больше МАUP и МАDOWN; другими словами, максимальная механическая эффективность возникает, когда элемент 72 управления находится в нейтральном или неотклоненном положении. К сожалению, при этой обычной конструкции, аэродинамические нагрузки возрастают при перемещении элемента управления в направлении смещенных положений, показанных на фиг.9А и 9С. В традиционных средствах управления механическая эффективность прямо пропорциональна величине плеча рычага.
Как можно видеть на этих фигурах, номинально максимальные воздушные нагрузки на поверхность элемента 72 управления возникают, когда элемент управления находится в максимально отклоненном вверх (фиг.9А) или вниз (фиг.9С) положении, но, к сожалению, оно также является положением, в котором получают наименьшую механическую эффективность. Для преодоления этого недостатка необходимо иметь приводное средство 74 очень большого размера.
В противоположность этому согласно изобретению механическая эффективность обратно пропорциональна величине плеча рычага. В частности, с исполнительным механизмом 26 согласно изобретению в нейтральном положении элемента 24 управления поворот ротора, показанный на фиг.10 и 10А поз.76, максимален, при этом плечо рычага ротора 28 максимально, а нагрузки от воздушного потока минимальны. При повороте ротора 28 на 45°, показанном на фиг.11 и 11А, элемент 24 управления отклонен приблизительно на 75%. Хотя нагрузки от воздушного потока возрастают, поворот ротора, показанный поз.78, уменьшается относительно обозначенного поз.76 с сопутствующим этому уменьшением плеча рычага, в результате чего механическая эффективность повышается. В максимально отклоненном положении элемента управления, показанном на фиг.12 и 12А, нагрузки от воздушного потока максимальны, при этом угол поворота ротора, обозначенный поз.80, равен нулю, в результате чего механическая эффективность максимальна или даже стремится к бесконечности.
В другом варианте осуществления изобретения, показанном на фиг.13 и 14, система управления полетом для самолета 20 включает эластомерные переходные секции 82, соединяющие крыло 84 и соответствующий элемент 86 управления, благодаря чему устраняется какой бы то ни было разрыв между крылом и поверхностью элемента управления. В этом отношении делается ссылка на передоверенный патент США №5794893 (Diller и др.). Эластомерные переходные секции 82 включают эластомерный материал 88 из силиконового каучука или другого пригодного материала, содержащий множество первых и вторых стержней 90, 92 соответственно, заделанных в него и проходящих между крылом и элементом управления, причем первые стержни 90 проходят, по существу, по направлению размаха крыла, а вторые стержни 92 проходят, по существу, по направлению хорды крыла. Стержни 90, 92, предпочтительно, выполнены из материала, выбранного из группы, состоящей из стекловолокна, графита, стали и алюминия.
Как показано на фиг.14, эластомерные переходные секции 82 также включают множество переходных соединений 94, шарнирно соединенных, соответственно, по направлению размаха крыла с множеством первых стержней 90, относящихся к расположенным ближе к фюзеляжу и дальше от фюзеляжа эластомерным переходным секциям, и с множеством вторых стержней 92 в районе границы между элементом 86 управления и крылом 84.
На фиг.15, 16и 17 показан еще один вариант осуществления изобретения. В этом случае, как и в предыдущих вариантах, первая плоскость 100 элемента управления установлена на крыле 102 для совершения поворотного движения вокруг оси, проходящей, по существу, по направлению размаха крыла и так, как описано в отношении элемента 24 управления и крыла 22. Вторая плоскость 104 элемента управления также установлена на крыле 102 с помощью первой плоскости 100 элемента управления для совершения поворотного движения вокруг оси, проходящей по направлению размаха крыла. Вторая плоскость 104 элемента управления, по существу, параллельна первой плоскости элемента управления и отнесена от первой плоскости элемента управления по направлению хорды крыла.
Первая и вторая плоскости элемента управления могут двигаться в диапазоне положений между нейтральным положением (фиг.16), в котором воздействующая на них нагрузка от воздушного потока минимальна, и отклоненным вверх положением, в одном случае, и отклоненным вниз положением (фиг.17), в другом случае. Нагрузка от воздушного потока на плоскости 100, 104 элемента управления максимальна, когда плоскости элемента управления занимают либо отклоненное вверх положение, либо отклоненное вниз положение.
Исполнительный механизм 106, по существу, подобный исполнительному механизму 26, предназначен для перемещения первой и второй плоскостей 100, 104 элемента управления, соответственно, между отклоненным вверх и отклоненным вниз положениями. Исполнительный механизм 106 содержит пару разнесенных по направлению размаха крыла активных роторов 108, причем каждый ротор установлен на крыле 102 с возможностью вращения вокруг проходящей по направлению хорды крыла оси 110 и имеет активный коленчатый элемент 112 с оконечностью 114, смещенной относительно оси вращения. Пара разнесенных по направлению размаха крыла пассивных роторов 116 установлена на второй плоскости 104 элемента управления с возможностью вращения вокруг проходящей по направлению хорды крыла оси 118. Каждый пассивный ротор 116 имеет пассивный коленчатый элемент 120 с оконечностью 122, смещенной относительно оси 118 вращения. С каждой парой роторов 108, 116 связана удлиненная, проходящая по направлению размаха крыла направляющая штанга 124, составляющая единое целое с плоскостью 100 элемента управления и находящаяся в одной плоскости с ней. Оконечности 114, 122 активного и пассивного коленчатых элементов, соответственно, шарнирно соединены друг с другом, и обе с возможностью скольжения соединены с направляющей штангой 124. Проходящая по направлению размаха крыла передаточная штанга 126 соединяет два комплекта активных роторов 108 и пассивных роторов 116 для обеспечения их синхронного движения.
Привод, не показанный в этом случае, но, по существу, подобный вращающемуся приводу 48, показанному на фиг.4, снабжен связанными с ним валами и зубчатыми передачами для вращения каждого активного ротора 108 вокруг оси 110 вращения. Благодаря скользящему соединению оконечностей 114, 122 активных и пассивных коленчатых элементов 112, 120 с направляющими штангами 124, первая и вторая плоскости 100, 104 элемента управления, таким образом, перемещаются между отклоненным вверх и отклоненным вниз положениями. Как и в случае с вариантом осуществления изобретения, описанным со ссылками на фиг.1-8, механическая эффективность, достигаемая исполнительным механизмом 106, максимальна, когда нагрузка от воздушного потока, воздействующая на плоскости 100, 104 элемента управления, также максимальна.
Резюмируя сказанное выше, отметим, что аэродинамика самолета, в котором применено настоящее изобретение, улучшена благодаря выдвигающимся элементам управления, которые обеспечивают лучшую управляемость, в том числе управляемость по крену, и большую подъемную силу, поскольку длина хорды крыла прямо пропорциональна подъемной силе. Кроме того, в отношении СМТ (технологии получения непрерывной поверхности крыла), изобретение обеспечивает желательное постоянное натяжение эластомерных переходных элементов посредством выдвижения и поворота элементов управления.
Следует понимать, что предшествующее описание дано только для иллюстрации изобретения. Специалист в данной области техники может вносить в него различные изменения и модификации без отхода от объема изобретения. Соответственно, настоящее изобретение охватывает все такие изменения, модификации и варианты, которые входят в объем прилагаемой формулы изобретения.
















Изобретение относится к области авиации. Система управления содержит элемент управления, исполнительный механизм для перемещения элемента управления и привод. Элемент управления установлен с возможностью поворота для перемещения в диапазоне положений между нейтральным положением, в котором нагрузка на его поверхность от воздушного потока минимальна, и отклоненными вверх и вниз положениями, в каждом из которых нагрузка от воздушного потока максимальна. Исполнительный механизм включает ротор, установленный на крыле для вращения вокруг оси, проходящей по направлению хорды крыла, и имеет коленчатый элемент с оконечностью, смещенной относительно оси вращения. Оконечность коленчатого элемента с возможностью скольжения соединена с направляющей штангой. Привод предназначен для вращения ротора и, благодаря скользящему соединению коленчатого элемента с направляющей, перемещения элемента управления. Технический результат - максимальная механическая эффективность при максимальной нагрузке от воздушного потока на крыло. 4 н. и 11 з.п. ф-лы, 17 ил.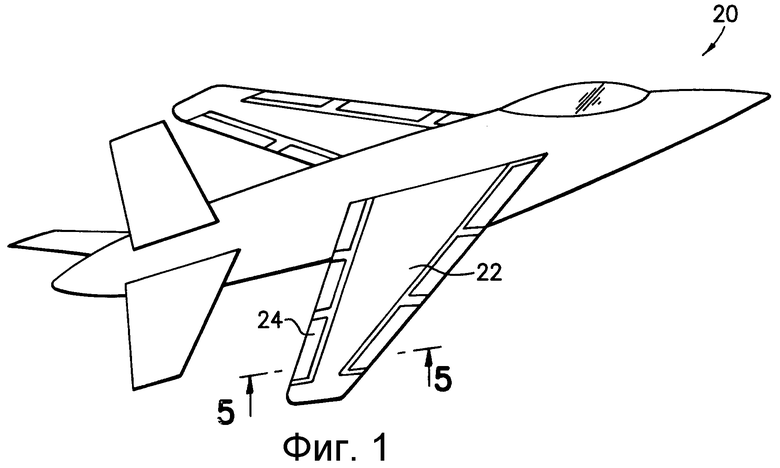
элемент управления, установленный на крыле для совершения поворотного движения вокруг оси, проходящей по направлению размаха крыла, в диапазоне положений между нейтральным положением, в котором нагрузка на него от воздушного потока минимальна, и отклоненным вверх положением в одном случае и отклоненным вниз положением в другом случае, при этом нагрузка на поверхность элемента управления от воздушного потока максимальна как в отклоненном вверх положении, так и в отклоненном вниз положении; и
исполнительный механизм для перемещения элемента управления между отклоненным вверх и отклоненным вниз положениями, причем исполнительный механизм включает
ротор, установленный на крыле для вращения вокруг оси, проходящей по направлению хорды крыла, и имеющий коленчатый элемент с оконечностью, смещенной относительно оси вращения;
удлиненный передаточный элемент, прикрепленный к элементу управления и находящийся, по существу, в одной плоскости с элементом управления, при этом оконечность коленчатого элемента с возможностью вращения прикреплена к муфте, с возможностью скольжения соединенной с передаточным элементом для движения по нему; и
привод для вращения ротора вокруг оси вращения и благодаря скользящему соединению муфты с передаточным элементом для перемещения элемента управления между отклоненным вверх и отклоненным вниз положениями;
посредством чего механическая эффективность исполнительного механизма максимальна, когда нагрузка от воздушного потока на поверхность элемента управления также максимальна.
разнесенные по направлению хорды крыла подшипники для установки в них с возможностью вращения ротора и
в которой исполнительный механизм включает
вращающийся привод, установленный на крыле;
приводной вал;
цилиндрическое зубчатое колесо, закрепленное на роторе и соосное с ним; и
червячное колесо, закрепленное на приводном вале и входящее в ведущее зацепление с цилиндрическим зубчатым колесом.
включающая шарнирный механизм, обеспечивающий поворотное перемещение элемента управления между отклоненным вверх положением и отклоненным вниз положением.
пару разнесенных по направлению размаха крыла первых шарнирных элементов, выступающих от монтажной поверхности и имеющих, по существу, удлиненные по направлению хорды крыла сквозные отверстия, находящиеся, по существу, в плоскости крыла; и
пару разнесенных по направлению размаха крыла вторых шарнирных элементов, выступающих от элемента управления в направлении монтажной поверхности, причем каждый из вторых шарнирных элементов включает составляющий с ним единое целое монтажный штифт для вставки с зацеплением в удлиненное отверстие соответствующего одному из первых шарнирных элементов.
эластомерные переходные секции, соединяющие крыло и элемент управления с предотвращением какого-либо разрыва между крылом и поверхностью элемента управления.
элемент управления, установленный на крыле с возможностью совершения поворотного движения вокруг оси, проходящей по направлению размаха крыла, в диапазоне положений между нейтральным положением, в котором нагрузка на него от воздушного потока минимальна, и отклоненным вверх положением в одном случае и отклоненным вниз положением в другом случае, при этом нагрузка на поверхность элемента управления от воздушного потока максимальна как в отклоненном вверх положении, так и в отклоненном вниз положении; и
исполнительный механизм для перемещения элемента управления между отклоненным вверх и отклоненным вниз положениями, причем исполнительный механизм включает
пару разнесенных по направлению размаха крыла роторов, причем каждый ротор установлен на крыле с возможностью вращения вокруг оси, проходящей по направлению хорды крыла, и имеет коленчатый элемент с оконечностью, смещенной относительно оси вращения;
удлиненный передаточный элемент, связанный с каждым ротором, причем передаточный элемент прикреплен к элементу управления и находится в целом в одной плоскости с элементом управления, при этом оконечность коленчатого элемента с возможностью вращения прикреплена к муфте, с возможностью скольжения соединенной с передаточным элементом для движения по нему; и
привод для вращения каждого ротора вокруг оси вращения и, благодаря скользящему соединению муфты с передаточным элементом, таким образом, для перемещения элемента управления между отклоненным вверх и отклоненным вниз положениями;
посредством чего механическая эффективность исполнительного механизма максимальна, когда нагрузка от воздушного потока на поверхность элемента управления также максимальна.
разнесенные по направлению хорды крыла подшипники для установки в них ротора с возможностью вращения и
в которой исполнительный механизм включает
вращающийся привод, установленный на крыле;
первый и второй выровненные в осевом направлении приводные валы;
первое цилиндрическое зубчатое колесо, закрепленное на первом роторе и соосное с ним;
второе цилиндрическое зубчатое колесо, закрепленное на втором роторе и соосное с ним;
первое червячное колесо, закрепленное на первом приводном валу и входящее в ведущее зацепление с первым цилиндрическим зубчатым колесом; и
второе червячное колесо, закрепленное на втором приводном валу и входящее в ведущее зацепление со вторым цилиндрическим зубчатым колесом.
первую плоскость элемента управления, установленную на крыле с возможностью поворотного перемещения вокруг оси, проходящей по направлению размаха крыла;
вторую плоскость элемента управления, установленную на крыле с возможностью поворотного перемещения вокруг оси, проходящей по направлению размаха крыла, причем вторая плоскость элемента управления в целом параллельна первой плоскости элемента управления и отнесена от нее по направлению хорды крыла;
первая и вторая плоскости элемента управления могут перемещаться в диапазоне положений между нейтральным положением, в котором нагрузка на них от воздушного потока минимальна, и отклоненным вверх положением в одном случае и отклоненным вниз положением в другом случае, причем нагрузка от воздушного потока на плоскости элемента управления максимальна как в отклоненном вверх положении, так и в отклоненном вниз положении; и
исполнительный механизм для перемещения первой и второй плоскостей элемента управления между отклоненным вверх и отклоненным вниз положениями, причем исполнительный механизм включает
пару разнесенных по направлению размаха крыла активных роторов, причем каждый ротор установлен на крыле с возможностью вращения вокруг оси, проходящей по направлению хорды крыла, и имеет активный коленчатый элемент с оконечностью, смещенной относительно оси вращения;
пару разнесенных по направлению размаха крыла пассивных роторов, причем каждый ротор установлен на второй плоскости элемента управления с возможностью вращения вокруг оси, проходящей по направлению хорды крыла, и имеет пассивный коленчатый элемент с оконечностью, смещенной относительно оси вращения;
удлиненный передаточный элемент, связанный с каждым ротором, причем передаточный элемент прикреплен к элементу управления и находится в целом в одной плоскости с элементом управления, при этом оконечности активных и пассивных коленчатых элементов с возможностью вращения прикреплены к муфте, с возможностью скольжения соединенной с передаточным элементом для движения по нему; и
привод для вращения каждого активного ротора вокруг оси вращения и, благодаря скользящему соединению муфты с передаточным элементом, таким образом, для перемещения первой и второй плоскостей элемента управления между отклоненным вверх и отклоненным вниз положениями;
посредством чего механическая эффективность исполнительного механизма максимальна, когда нагрузка от воздушного потока на первую и вторую плоскости элемента управления также максимальна.
элемент управления, установленный на крыле в районе монтажной поверхности с возможностью осуществления поворотного перемещения вокруг оси, проходящей по направлению размаха крыла, в диапазоне положений между нейтральным положением, в котором нагрузка от воздушного потока на него минимальна, и отклоненным вверх положением в одном случае, и отклоненным вниз положением в другом случае, при этом нагрузка от воздушного потока на поверхность элемента управления максимальна как в отклоненном вверх положении, так и в отклоненном вниз положении;
шарнирный механизм, с возможностью поворота удерживающий элемент управления на крыле для перемещения между отклоненным вверх положением и отклоненным вниз положением, а также обеспечивающий перемещение элемента управления по направлению хорды крыла, когда он перемещается между отклоненным вверх положением и отклоненным вниз положением;
ротор, установленный на крыле с возможностью вращения вокруг оси вращения, проходящей по направлению хорды крыла, и имеющий коленчатый элемент с оконечностью, смещенной относительно оси вращения;
передаточный элемент, прикрепленный к элементу управления, в рабочем положении соединенному с коленчатым элементом; и
привод для вращения ротора вокруг оси вращения и, благодаря передаточному элементу, таким образом, для перемещения элемента управления между отклоненным вверх и отклоненным вниз положениями;
посредством чего механическая эффективность исполнительного механизма максимальна, когда нагрузка от воздушного потока, воздействующая на поверхность элемента управления, также максимальна.
пару разнесенных по направлению размаха крыла первых шарнирных элементов, выступающих от монтажной поверхности и имеющих в целом удлиненные сквозные отверстия, находящиеся в целом в плоскости крыла; и
пару разнесенных по направлению размаха крыла вторых шарнирных элементов, выступающих от элемента управления в направлении монтажной поверхности, причем каждый из вторых шарнирных элементов включает составляющий с ним единое целое монтажный штифт для вставки с зацеплением в удлиненное отверстие соответствующего одного из первых шарнирных элементов.
| US 3109613 А, 05.11.1963 | |||
| US 6244542 А, 12.06.2001 | |||
| УСТРОЙСТВО ВЫДВИЖЕНИЯ ЗАКРЫЛКА | 1984 |
|
SU1246516A1 |

