Изобретение относится к области авиастроения и может быть использовано в системах управления несущими винтами.
Известна трансмиссия вертолета, имеющая автоматы перекоса, связанные механически посредством тяги с рычагами, соединенными с опорными узлами лопастей несущего винта (см. кн. Вахитов А.В. Вертолет Ка-26. - М.: Транспорт, 1973, стр. 61). Автомат перекоса содержит тарелку с рычагами продольного и поперечного управления и ротор с рычагами для связи посредством тяг с лопастями несущего винта, а также шлиц-шарниры.
Недостатком этого устройства является сложность, плохая защищенность узлов трения и подшипников от воздействия окружающей среды.
Наиболее близким по технической сущности и достигаемому результату к заявляемому является автомат перекоса (RU 2402457 C1, В64С 27/32, 27.10.2010), включающий корпус, якорь, колонку несущего винта, вал на роликовых подшипниках, установленный внутри колонки, шаровой подшипник, радиально-упорный подшипник скольжения, а также тяги управления.
Недостатком этого устройства является плохая защищенность узлов трения, большие фрикционные потери и невысокий КПД.
Снижение трудоемкости обслуживания и сокращение времени, затрачиваемого на регламентные работы за счет использования герметичного исполнения.
Задачей данного изобретения является создание автомата перекоса для управления лопастями несущего винта вертолета конструктивно простого и обладающего высокой надежностью.
Технический результат - увеличение ресурса, повышение надежности.
Указанная задача решается применением автомата перекоса, включающего корпус, якорь, колонну несущего винта, вал, установленный внутри колонны, шаровые подшипники, а также тяги управления, а технический результат достигается тем, что он содержит установленный в расточке якоря шариковый однорядный подшипник с разрезным внутренним кольцом, опирающимся на заплечик корпуса и на навинченную на корпус гайку, внутри упомянутого корпуса размещены два сухаря из антифрикционного материала со сферическими внутренними поверхностями, контактирующие с ползуном и зафиксированные упором с резьбой, причем наружное кольцо шарикового радиально-упорного однорядного подшипника установлено в отверстии якоря и, посредством винтов, зажато между двумя дисками, плоские наружные поверхности которых контактируют с лабиринтами, которые имеют кольцевые канавки для размещения колец из эластичного материала, контактирующие с кольцевыми проточками в корпусе и в гайке, отверстия в двух стеблях корпуса для соединения с тягами продольного и поперечного управления и отверстия в проушинах якоря для шарниров тяг управления шагами лопастей несущего винта размещены в одной общей плоскости, а корпус связан шарнирно реактивной тягой с корпусом вертолета.
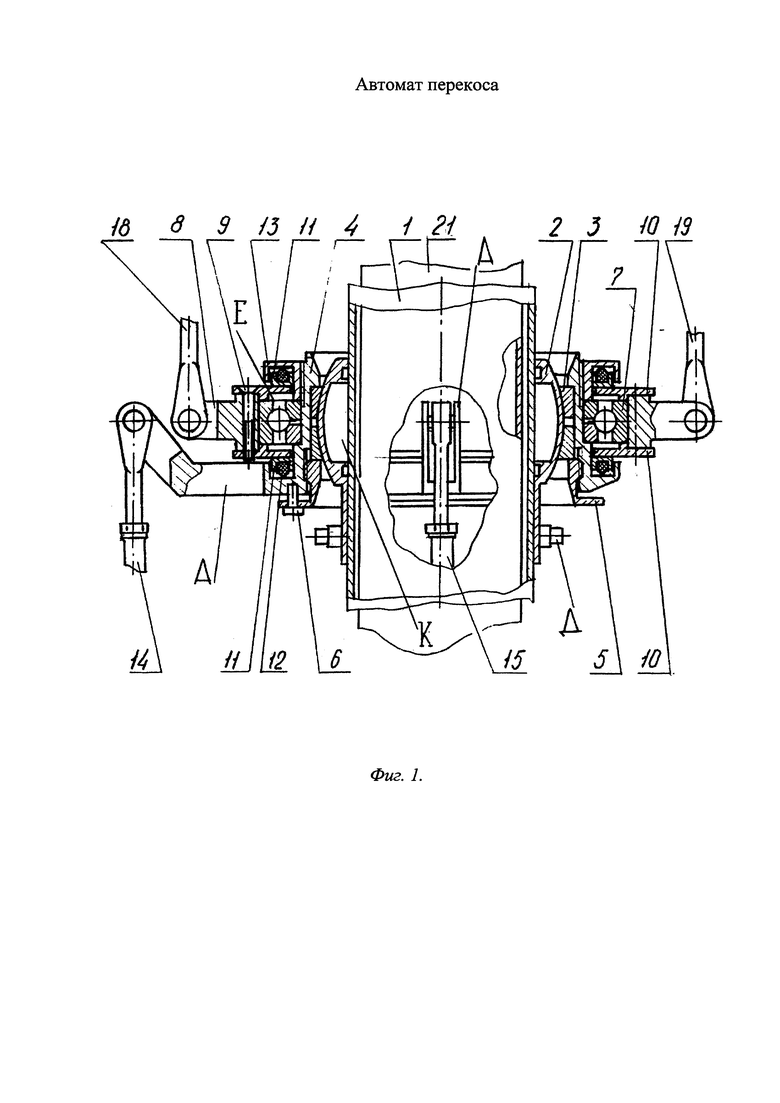
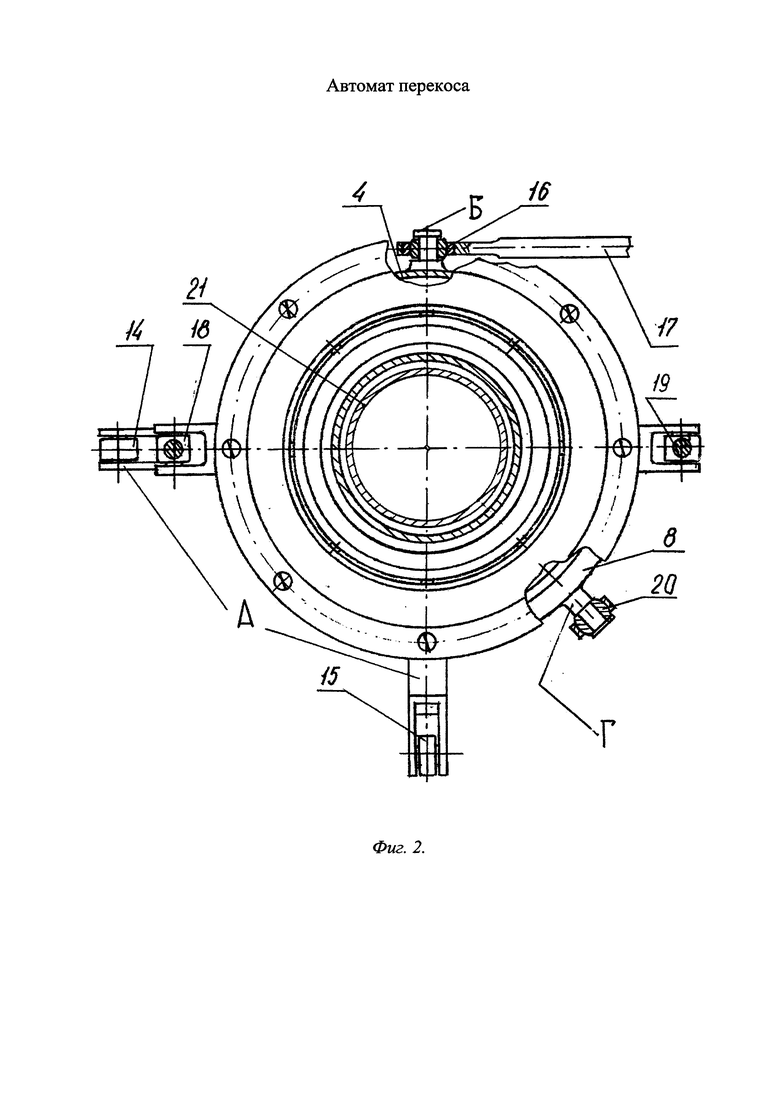
Конструкция автомата перекоса поясняется чертежами: на фиг. 1 показан вертикальный разрез автомата перекоса; на фиг. 2 - вторая проекция устройства.
Автомат перекоса установлен на колонне 1 (фиг. 1), связанной с редуктором несущего винта вертолета (на чертеже не показан) посредством сферического шарнирного подшипника, образованного ползуном 2 и двумя сухарями 3 из антифрикционного материала со сферическими внутренними поверхностями, размещенными в расточке корпуса 4 и фиксированными при помощи упора 5 с резьбой, ввинченного в соответствующее отверстие корпуса 4 с возможностью воздействия на величину зазора между сухарями 3 и сферической поверхностью ползуна 2. Упомянутый упор 5 установлен и закреплен в нужном положении фиксатором 6.
На наружной цилиндрической поверхности корпуса 4 размещен шариковый однорядный радиально-упорный подшипник 7 с разрезным внутренним кольцом. Наружное кольцо шарикового радиально-упорного однорядного подшипника установлено в отверстии якоря 8 и, посредством винтов 9, зажато между двумя дисками 10, плоские наружные поверхности которых контактируют с лабиринтами 11, которые имеют кольцевые канавки для размещения колец 12 из эластичного материала, например резины.
Части внутреннего кольца шарикового радиально-упорного однорядного подшипника 7 опираются на заплечик корпуса 4 и на гайку 13, проточка которой использована для размещения лабиринта 11 и кольца 12. Аналогично размещены лабиринт 11 и кольцо 12 в соответствующей расточке корпуса 4. Корпус 4 имеет два взаимно перпендикулярных стебля А, предназначенных для взаимодействия с тягой продольного управления 14 и тягой поперечного управления 15, а цапфа Б сферическим шарнирным подшипником 16 соединена с реактивной тягой 17, связанной шарнирно с корпусом вертолета или редуктора его несущего винта.
Якорь 8 имеет две спицы с пазами, шарнирно связанные с тягами 18 и 19 управления основным и дифференциальным шагами лопастей несущего винта, а также прилив Г (фиг. 2) и сферический шарнирный подшипник 20 для взаимодействия со шлиц-шарниром (на чертеже не показан), допускающим перемещение ползуна 2 вдоль колонны 1 за счет воздействия на его цапфы Д системой управления винтом вертолета и исключающим возможность вращения якоря 8 относительно вала 21 и ступицы несущего винта. Детали шлиц-шарнира и ступицы винта на чертеже не показаны.
Внутренние полости Е заполнены пластичным смазочным материалом. Отверстия в стеблях корпуса для шарниров тяг продольного и поперечного управления и отверстия в проушинах якоря для шарниров тяг управления шагом лопастей размещены в одной общей плоскости.
Работает автомат перекоса следующим образом.
Вращение вала 21, связанного со ступицей несущего винта и, посредством шлиц-шарнира, с якорем 8 приводит несущий винт в движение, при этом тяги 18 и 19, связанные шарнирно с соответствующими рычагами лопастей несущего винта, поворачивают лопасти на угол атаки, определяемый осевым положением ползуна 2, управляемого через цапфы Д рукояткой управления вертолета (на чертеже не показана), которая соединена также с тягами продольного управления 14 и поперечного управления 15 кинематически, воздействием на которые устанавливается дифференциальный угол атаки лопастей, соответствующий выбранному режиму полета вертолета за счет наклона якоря 8 на требуемый угол. Синхронность вращения якоря 8 и вала 21 обеспечивается шлиц-шарниром.
Герметизация полости Е осуществляется лабиринтами 11 за счет упругой деформации колец 12 прижатыми к дискам 10 и образующими торцевые уплотнения. Возникающие в этих уплотнениях моменты трения воспринимаются посредством сферического шарнирного подшипника 16 через тягу 17 корпусом (фюзеляжем) вертолета.
В процессе сборки автомата перекоса зазор между сухарями 3 и сферой ползуна 2 регулируется ввинчиванием упора 5. Зазор в радиально-упорном подшипнике 7 устанавливается гайкой 13.
Применение предложенного автомата перекоса обеспечивает повышение надежности. Кроме того, упрощается система управления вертолетом за счет расположения шарниров тяг продольного и поперечного управления в общей плоскости с шарнирами управления основным и дифференциальным шагами лопастей несущего винта.
Таким образом, осуществляется надежное воздействие на углы атаки лопастей несущего винта вертолета и обеспечение необходимого шага лопастей на всех режимах полета вертолета.
Итак, заявленное изобретение позволяет повысить надежность. Кроме того, упрощается система управления вертолетом за счет расположения шарниров тяг продольного и поперечного управления в общей плоскости с шарнирами управления основным и дифференциальным шагами лопастей несущего винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛОНКА НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2013 |
|
RU2559677C2 |
| Несущая система винтокрылого летательного аппарата | 2020 |
|
RU2751654C1 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2088479C1 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2004 |
|
RU2261822C1 |
| Колонка соосных несущих винтов | 1988 |
|
SU1824346A1 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2371351C2 |
| ВТУЛКА ВОЗДУШНОГО ВИНТА С АВТОМАТОМ ПЕРЕКОСА | 2018 |
|
RU2746024C2 |
| НЕСУЩИЙ ВИНТ | 2006 |
|
RU2338665C2 |
| СПОСОБ УПРАВЛЕНИЯ НЕСУЩИМ ВИНТОМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2203835C2 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1988 |
|
SU1828001A1 |
Изобретение относится к области авиации, в частности к конструкциям систем управления несущими винтами. Автомат перекоса содержит установленный в расточке якоря шариковый однорядный подшипник с разрезным внутренним кольцом, опирающимся на заплечик корпуса и на навинченную на корпус гайку. Внутри упомянутого корпуса размещены два сухаря из антифрикционного материал со сферическими внутренними поверхностями, контактирующие с ползуном и зафиксированные упором с резьбой. Наружное кольцо шарикового радиально-упорного однорядного подшипника установлено в отверстии якоря и посредством винтов зажато между двумя дисками, плоские наружные поверхности которых контактируют с лабиринтами, которые имеют кольцевые канавки для размещения колец из эластичного материала, контактирующие с кольцевыми проточками в корпусе и в гайке. Отверстия в стеблях корпуса для соединения с тягами продольного и поперечного управления и отверстия в проушинах якоря для шарниров тяг управления шагами лопастей несущего винта размещены в одной общей плоскости, а корпус связан шарнирно реактивной тягой с корпусом вертолета. Обеспечивается увеличение ресурса, повышение надежности. 2 ил.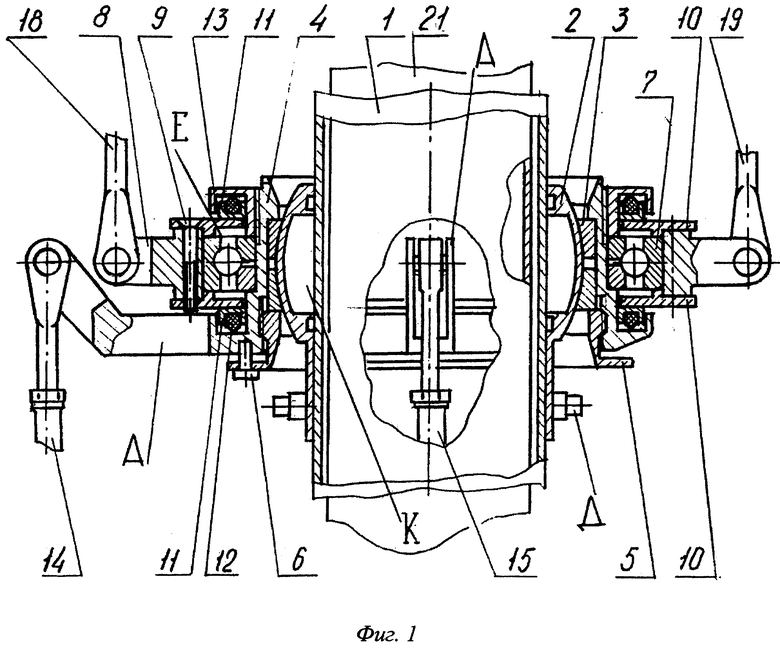
Автомат перекоса, включающий корпус, якорь, колонну несущего винта, вал на роликовых подшипниках, установленный внутри колонны, шаровой подшипник, а также тяги управления, отличающийся тем, что он содержит установленный в расточке якоря шариковый однорядный радиально-упорный подшипник с разрезным внутренним кольцом, опирающимся на заплечик корпуса и на навинченную на корпус гайку, кроме того, внутри упомянутого корпуса размещены два сухаря из антифрикционного материала со сферическими внутренними поверхностями, контактирующими с ответной сферической поверхностью ползуна, зафиксированные упором с резьбой, причем наружное кольцо шарикового радиально-упорного однорядного подшипника установлено в отверстии якоря и посредством винтов зажато между двумя дисками, плоские наружные поверхности которых контактируют с лабиринтами, которые имеют кольцевые канавки для размещения колец из эластичного материала, контактирующие с кольцевыми проточками в корпусе и в гайке, причем отверстия в стеблях корпуса для соединения с тягами продольного и поперечного управления и отверстия в проушинах якоря для шарниров тяг управления шагами лопастей несущего винта размещены в одной общей плоскости, а корпус связан шарнирно реактивной тягой с корпусом вертолета.
| КОЛОНКА ВЕРТОЛЕТА | 1999 |
|
RU2156208C1 |
| АВТОМАТ ПЕРЕКОСА | 2009 |
|
RU2402457C1 |
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА | 2004 |
|
RU2261822C1 |
| US 20150307189 A1, 29.10.2015 | |||
| US 6280141 B1, 28.08.2001. | |||

