Устройство относится к несущим винтам с механизмом управления общим и циклическим шагом несущего винта аппарата. Может быть использован в малогабаритных летательных аппаратах с вертикальным взлетом индивидуального назначения.
Известные несущие винты /см. с.73 "Политехнический словарь". Издательство "Советская энциклопедия". Вертолет, а также с.8 и с.166 "Словарь-справочник по механизмам" А.Ф.Крайнева. - М.: Машиностроение/, включающие в себя несколько прямых ножикообразных лопастей, шарнирно связанных с крестовиной, закрепленной на несущем валу. Каждая лопасть связана посредством штанг и шарниров с механизмом управления общим и циклическим шагом несущего винтa, позволяющим путем соответствующего изменения углов установки лопастей изменять величину и направление равнодействующей аэродинамических сил несущего винта /см. Автомат перекоса/.
Недостатками известных несущих винтов является то, что, имея длинные прямые лопасти, при вращении они описывают большой круг, чем создают большую опасность при приближении к нему и, наоборот, сам аппарат требует при посадке большую свободную площадь. Кроме того, узкие ножикообразные лопасти не могут создать над винтом область разрежения, а внизу, под винтом, область избыточного давления по той причине, что воздух беспрепятственно может перемещаться вокруг лопастей, и среда быстро восстанавливается. Тяга создается только за счет удара лопастями по воздуху, т.е. используется только реактивная сила при ударах лопастями. Узкие прямые лопасти не могут эффективно использовать воздушный поток, отсекаемый лопастями еще по той причине, что воздушная среда /как опора/ прессуется лопастями в двух направлениях: в вертикальном и горизонтальном.
Вертикальная реактивная сила используется, а горизонтальная - уходит вдоль лопастей, создавая бесполезный ветер.
С целью уменьшения габаритов несущего винта и увеличения подъемной силы в предлагаемом движителе лопасти выполнены полусферическими и установлены горбом вверх, образуя поверхность полусферы, и практически отсутствует свободное пространство между лопастями.
В данном варианте полусфера разделена в диаметральной плоскости на две равные части /лопасти/, которые снабжены несущими дугами, установленными друг от друга на минимальном расстоянии и шарнирно закрепляющимися в средней своей части к головке несущего вала и связаны через систему штанг и шарниров с автоматом перекоса и управления.
Каждая лопасть охвачена по кромкам, образующим полукруг, окружной дугой жесткости, которая жестко связана с внешними концами несущих дуг, а в средней ее, части, дополнительно, установлена поперечная дуга жесткости, которая также жестко связана с несущей дугой и окружной дугой жесткости.
Образовавшиеся окна между дугами закрываются с внутренней стороны плотным и прочным материалом.
В результате образования лопастями купола полусферической формы, установленного горбом вверх, и устранения свободных промежутков между лопастями, воздушный поток, отсекаемый лопастями, будет полностью опрокидываться вертикально вниз, создавая этим самым повышенное давление воздуха под винтом и разрежение над винтом. При этом обратный переход воздушной среды будет более длительным и затруднительным по сравнению с переходом этой же среды у известных прямых и узких лопастей с свободными промежутками между ними.
В данной конструкции движителя используется эффект паруса или зонта. За счет большой площади и выгнутого профиля лопастей создается возможность "загнать" всю отсекаемую массу воздуха под плоскость лопастей, и за счет этого возникает увеличение подъемной силы.
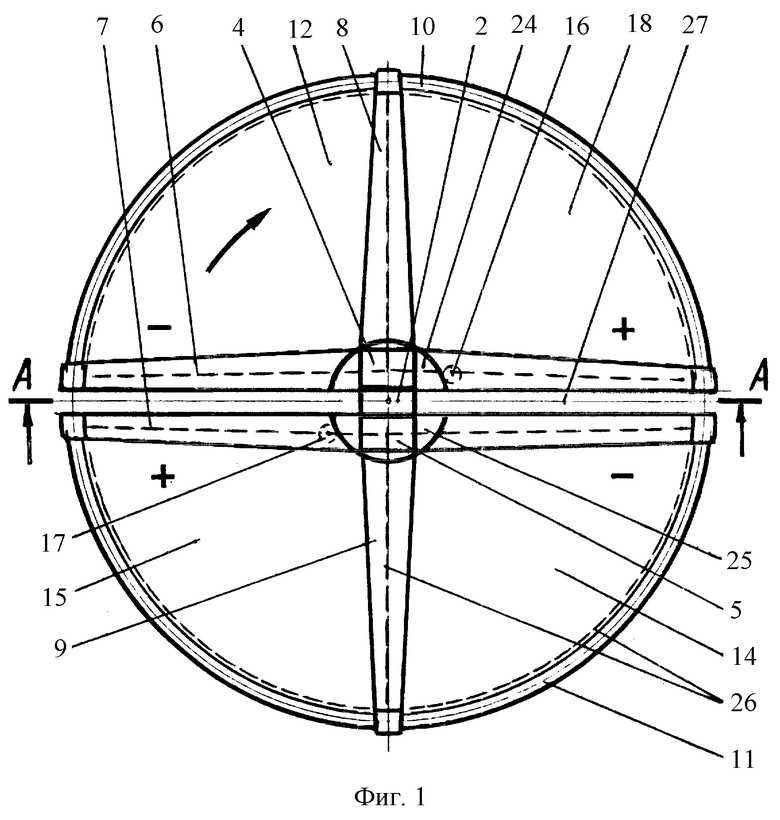
На фиг.1 показан движитель, вид сверху.
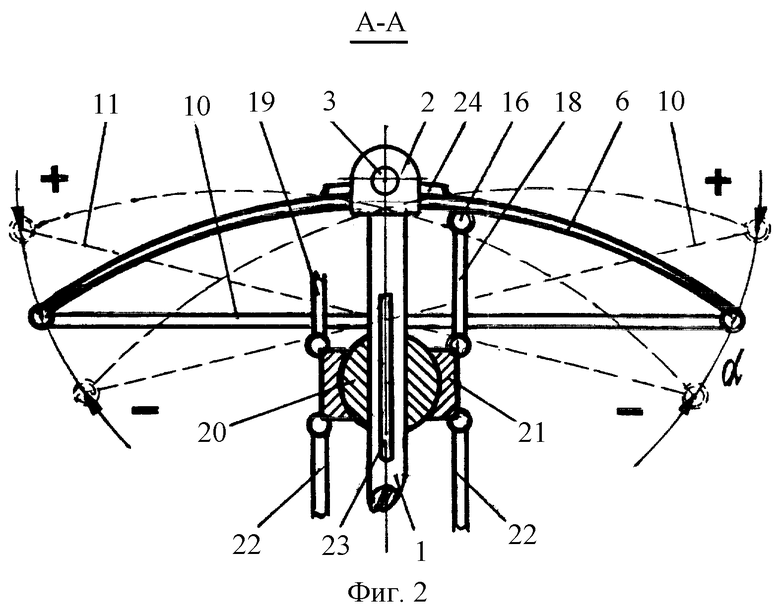
На фиг.2 показан разрез по А-А на фиг.1.
Движитель содержит несущий вал 1, на выходном конце которого выполнена головка вала 2, сплюснутая с боков с диаметрально расположенными осями 3, на которых установлены шарнирно втулки 4 и 5 лопастей.
Каждая лопасть /две шт./ включает в себя несущую дугу 6 и 7, жестко связанную с втулками 4 и 5, свободно вращающихся на осях 3, дополнительную поперечную дугу 8 и 9, жестко связанную с несущими дугами 6 и 7 и с окружными дугами жесткости 10 и 11, которые своими концами жестко соединяются с наружными концами несущих дуг 6 и 7. Образовавшиеся окна 12, 13, 14 и 15 между дугами закрываются плотной и прочной материей /тканью, пленкой или листом из легких металлов/.
Каждая лопасть соединяется посредством шарниров 16 и 17 и штанг 18 и 19 с автоматом перекоса, представляющим собой шаровой шарнир 20 с обоймой 21, который, в свою очередь, соединяется штангами 22 с механизмом управления /не показано/. Шаровой шарнир 20 установлен с наружной стороны несущего вала 1 и сводно может перемещаться вдоль шлица 23, установленного на валу.
Для более прочного соединения между несущими дугами 6 и 7 и поперечными дугами 8 и 9 установлены пластины 24 и 25. Пунктирные линии 26 указывают места креплений материала к дугам. Цифра 27 указывает место свободного пространства между несущими дугами 6 и 7.
Угол α показывает размер максимального поворота лопастей относительно друг друга вокруг осей 3.
Знак плюс /+/ указывает на край лопасти, который поднимается вверх. Знак минус /-/ указывает на край лопасти, который опускается вниз. Движитель может создавать подъемную силу с равным успехом как при левом, так и при правом вращении несущего винта.
Работает следующим образом.
Для вертикального подъема аппарата штанги 22 натягиваются равномерно, при этом шаровой шарнир 20 перемещается вдоль шлица 23 вниз или вверх. Штанги 18 и 19 будут воздействовать через шарниры 16 и 17 на несущие дуги 6 и 7 и лопасти повернутся вокруг осей 3 на одинаковый угол. При правом вращении, как показано стрелкой на фиг.1, передние края лопастей будут подниматься вверх, как показано на фиг.2 знаками /+/, на максимальный угол α.
При опускании аппарата вниз штанги 22 перемещают шаровой шарнир в обратном направлении, вниз, при этом лопасти будут поворачиваться вокруг осей 3 в обратном направлении. Таким образом осуществляется общая установка углов лопастей.
При повороте аппарата вправо, влево, назад и вперед задающий механизм перекоса /не показано/ устанавливает соответствующий перекос в шаровом шарнире 20, и лопасти будут совершать циклический шаг, т.е. увеличивать угол поворота от минимального размера угла до максимального α в том направлении, какое будет задано автоматом перекоса.
Изобретение относится к несущим винтам, использующимся в летательных аппаратах с вертикальным взлетом. Движитель содержит лопасти, шарнирно установленные на несущем валу и соединенные посредством штанг и шарниров с механизмом управления общим и циклическим шагом несущего винта. При этом движитель представляет собой полусферу, обращенную горбом вверх и разделенную в диаметральной плоскости на две равные части, являющиеся лопастями. Лопасти образованы плотным и прочным материалом, закрепленным с внутренней стороны на несущих дугах, дугах жесткости и дополнительных поперечных дугах. Несущие дуги установлены на минимальном расстоянии друг от друга и шарнирно закреплены средними своими частями на головке несущего вала. Дуги жесткости выполнены в форме полукругов, жестко связанных с внешними концами несущих дуг. Дополнительные поперечные дуги жесткости жестко связаны с несущими дугами и дугами жесткости в виде полукругов, причем несущие дуги связаны посредством штанг и шарниров с автоматом перекоса и механизмом управления. Изобретение позволяет уменьшить габариты несущего винта и увеличить подъемную силу. 2 ил.
Движитель, содержащий лопасти, шарнирно установленные на несущем валу и соединенные посредством штанг и шарниров с механизмом управления общим и циклическим шагом несущего винта, отличающийся тем, что представляет собой полусферу, обращенную горбом вверх и разделенную в диаметральной плоскости на две равные части, являющиеся лопастями, которые образованы плотным и прочным материалом, закрепленным с внутренней стороны на несущих дугах, установленных на минимальном расстоянии друг от друга и шарнирно закрепленных средними своими частями на головке несущего вала, дугах жесткости в форме полукругов, жестко связанных с внешними концами несущих дуг, и дополнительных поперечных дугах жесткости, жестко связанных с несущими дугами и дугами жесткости в виде полукругов, причем несущие дуги связаны посредством штанг и шарниров с автоматом перекоса и механизмом управления.
| АВТОМАТ ПЕРЕКОСА НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2088479C1 |
| ВОЗДУШНЫЙ ДВИЖИТЕЛЬ ДЛЯ СОЗДАНИЯ ВОЗВРАТНОГО ПОТОКА И СПОСОБ ЕГО СОЗДАНИЯ | 1996 |
|
RU2145295C1 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| US 3603700 А, 07.09.1971. | |||

