Изобретение относится к области сигнализации и контроля и может быть использовано для повышения производительности и безопасности работы подъемных устройств для захвата, перемещения и складирования стопок изделий, преимущественно на предприятиях массового производства с большой номенклатурой изделий и полуфабрикатов, особенно на предприятиях пищевой промышленности, где готовая продукция хранится до отгрузки заказчику на поддонах или в лотках, перемещаемых погрузчиками (штабелерами) с вилочным захватом.
Известны различные датчики приближения, основанные на контроле расстояния от подвижного средства до предмета (дальномеры), основанные на различных физических принципах, например, эхо-локаторы, используемые при парковке автомобилей (см., напр., Датчик парковки (Parktronic) Rarkmaster 2-В-2). Однако это универсальное техническое решение в условиях складского хозяйства, где имеется большое число различных вариантов взаимного расположения продукции на поддонах или в лотках и различная конфигурация стеллажей, полок и т.п., не исключает появления большого числа ложных срабатываний. Кроме того, устройства такого рода не позволяют использовать повсеместно используемую технологию учета и адресации продукции с помощью оптических меток - штрих-кода, наносимого на каждый поддон, стопку продукции и место стеллажа и, соответственно, оптических считывателей этой информации.
Наиболее близким по своей технической сущности к предложенному техническому решению является считыватель с веерной диаграммой направленности, содержащий лазерный блок излучения и приема отраженного сигнала (см., напр., считыватель DS 2400а фирмы Data Logic), который обеспечивает считывание штрих-кода, расположенного в его зоне чтения (в диапазоне расстояний от считывателя до изображения штрих-кода, в котором возможно считывание этого штрих-кода). Однако это устройство не обеспечивает автоматический контроль приближения погрузчика к штабелю и правильности расположения продукции на рабочих элементах захвата. Это снижает производительность работы погрузчика и может привести к аварийным ситуациям. Кроме того, данному устройству присущи следующие недостатки - относительно большая потребляемая мощность, что приводит к повышенному энергопотреблению при постоянной включенном считывателе и практически не позволяет использовать его в автономном, беспроводном исполнении, ограниченный ресурс работы, обусловленный ресурсом лазера, а также опасность поражения глаз персонала, находящегося в зоне работы погрузчика. Дополнительным недостатком устройства является уникальность его установки на погрузчик сбоку от оснований лап погрузчика (см., напр. Проспект фирмы Datalogic S.p.A. в журнале CASE HISTORY №11, 1997 г.).
Целью предложения является расширение функциональных возможностей устройства за счет обеспечения автоматического контроля приближения и правильности расположения обрабатываемого груза на погрузчике при использовании одного считывателя с одновременным сокращением его времени работы, повышение безопасности работы устройства, а также возможность удобного размещения и монтажа устройства на погрузчике, на котором имеется только плоская зона, расположенная между основаниями и сбоку от вилочного захвата погрузчика, находящаяся вне возможного размещения груза. Предлагаемое техническое решение обеспечивает его универсальность по отношению к многообразной погрузочной технике и экономичность его использования, так как позволяет использовать радиоканал для связи с остальными блоками складского комплекса. С этой целью в устройство контроля работы погрузчиков, содержащее считыватель, выход которого соединен с вычислительным центром, введен отражатель, плоскость симметрии диаграммы направленности считывателя, расположенная в плоскости, параллельной фронтальной плоскости устройства, имеет возможность поворота вокруг горизонтальной оси, перпендикулярной фронтальной плоскости устройства, и оптически связана с отражателем, нормаль к отражающей поверхности которого образует с плоскостью симметрии диаграммы направленности считывателя угол, равный половине арктангенса отношения длины зоны чтения считывателя к ширине зоны контроля, таймер, селективный обнаружитель, ось симметрии диаграммы направленности которого наклонена относительно горизонтальной плоскости, нормальной фронтальной плоскости устройства на угол, арктангенс которого равен отношению глубины зоны обнаружения к высоте зоны обнаружения, а относительно вертикальной плоскости, нормальной фронтальной плоскости устройства на угол, арктангенс которого равен отношению глубины зоны обнаружения к ширине зоны обнаружения, максимальная дальность зоны чувствительности обнаружителя к максимальной дальности зоны чувствительности считывателя находится в соотношении 1,1-1,8, сигнальный выход обнаружителя через таймер подключен к разрешающему входу считывателя, обнаружитель максимальной дальности, ось симметрии диаграммы направленности которого нормальна к фронтальной плоскости устройства, сигнальный выход обнаружителя максимальной дальности подключен к разрешающему входу считывателя, и обнаружитель минимальной дальности, ось симметрии диаграммы направленности которого нормальна к фронтальной плоскости устройства, сигнальный выход обнаружителя минимальной дальности подключен к блокирующему входу считывателя.
Так как предложенное устройство предназначено для повышения производительности, точности и безопасности работы операторов подъемных устройств для захвата, перемещения и складирования стопок изделий (погрузчиков), преимущественно на предприятиях массового производства с большой номенклатурой изделий и полуфабрикатов, то сущность предложения поясняется на примере его использования при установке на погрузчик, содержащий транспортное средство, на котором установлен подъемник с вилочным захватом, на котором установлено предлагаемое устройство. Как известно, погрузчик-штабелер с фронтальным выдвижным грузоприемником или вилами, перемещающийся по поверхности пола на колесах из монолитной резины, пластмассы или металла, предназначен для укладки грузов в штабели или стеллажи высотой до 8 метров. Управляется из кабины (в ряде случаев подъемной). Грузоподъемность до 3,2 т (См. БСЭ, статья "Погрузчик").
Известны различные конструкции погрузчиков, содержащих транспортное средство, на котором установлен подъемник с вилочным захватом (см., напр., патент РФ №2048430, М.кл. В66F 9/06, заявл. 21.06.91). В этом устройстве вилочный захват выполнен в виде двух вертикальных симметрично расположенных профилированных стоек, установленных на каретке с возможностью регулируемого перемещения для выбора расстояния между ними.
В зависимости от формы упаковки, в которой хранятся перемещаемая продукция, форма и конструктивное выполнение вилочного захвата различны. Например, в устройстве по патенту РФ №2238237, М.кл. В66F 9/12, заявл. 14.04.2000 г. рабочий элемент вилочного захвата выполнен в виде двух игл.
Однако общим для известных устройств данного назначения является наличие двух рабочих элементов (захватов), размещенных на каретке с возможностью регулируемого перемещения для выбора расстояния между ними. При этом в конструкции известных заявителю устройств имеется примыкающее к каретке свободное пространство между рабочими элементами, не занимаемое в процессе работы устройства расположенной в стопке или на поддоне продукцией. Данное обстоятельство позволяет разместить предлагаемое устройство в этом свободном пространстве. Это также является одним из преимуществ заявленного технического решения, так как исключает какое-либо отрицательное влияние его установки на функциональные возможности и технические характеристики погрузчика и не требует модернизации последнего.
Сущность изобретения поясняется чертежами. Так как предложенное устройство предназначено для установки его на погрузчик, на чертежах поясняется его работа в составе погрузчика, напр. по пат. РФ №2048430.
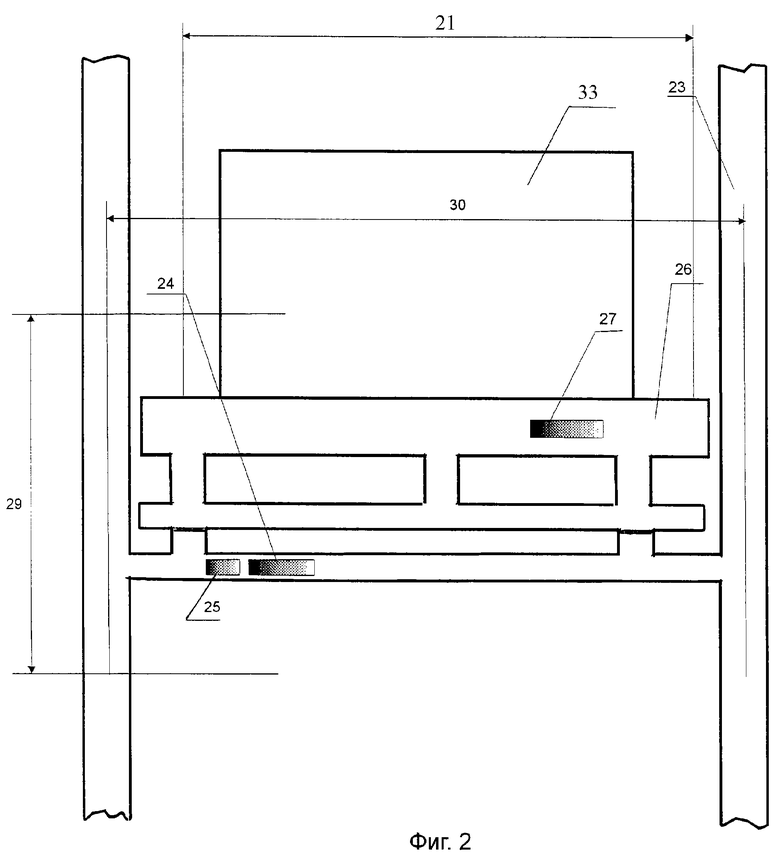
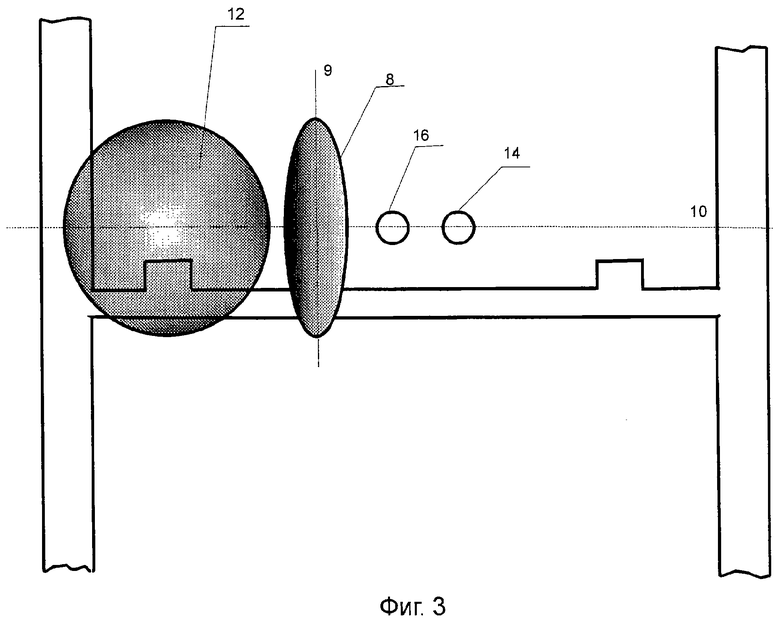
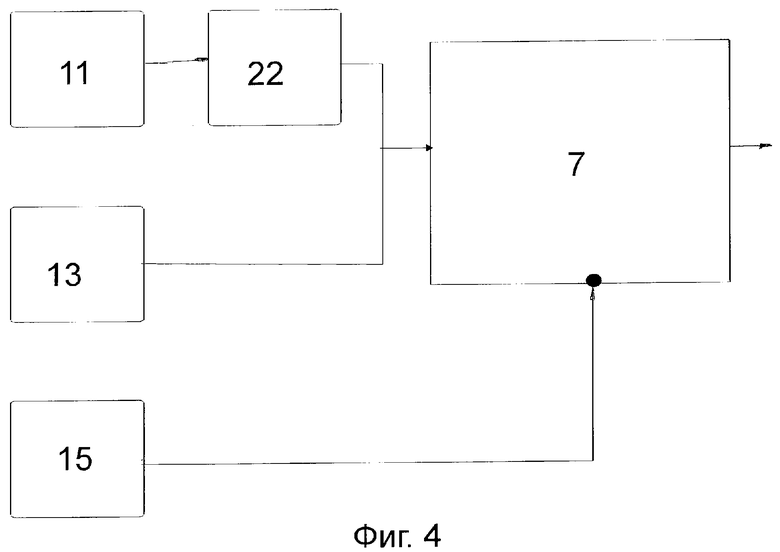
На фиг.1 показаны элементы предлагаемого устройства, расположенные в полости погрузчика (вид сверху), на фиг 2 - пример расположения поддона со складируемым товаром на стеллаже, на фиг.3 - фрагмент стеллажа с проекциями диаграмм направленности элементов устройства на фронтальную поверхность стеллажа, на фиг.4 - функциональная схема предлагаемого устройства.
На чертежах обозначено: транспортное средство 1 с подъемником 2, вилочным захватом, состоящим из рабочих элементов 3 и 4 с основаниями 5 и 6 соответственно, в совокупности представляющие собой погрузчик. Между основаниями 5 и 6 имеется свободная полость, в которой размещается предлагаемое устройство. Элементы предлагаемого устройства, расположенного в этой полости: считыватель 7 с веерной диаграммой 8 направленности, которая имеет вертикальную 9 и горизонтальную 10 плоскости симметрии, селективный обнаружитель 11, с диаграммой 12 направленности, обнаружитель 13 максимальной дальности с диаграммой 14 направленности, обнаружитель 15 минимальной дальности с диаграммой 16 направленности (на фиг.1 диаграммы направленности показаны в виде их проекций на горизонтальную плоскость, а на фиг.3 - в виде их сечений вертикальной плоскостью), отражатель 17, нормаль 18 к отражающей поверхности которого образует с вертикальной плоскостью 9 симметрии диаграммы 8 направленности считывателя 7 угол 19, равный половине арктангенса отношения длины 20 зоны чтения считывателя 7 к ширине 21 зоны контроля, таймер 22 (на фиг.1 электронный блок - таймер не показан).
На чертежах показаны также стеллаж 23 со штрихкодовой меткой 24 и селективной меткой 25, поддон 26 со штрихкодовой меткой 27. Горизонтальная плоскость совпадает с плоскостью чертежа фиг.1, а фронтальная плоскость устройства нормальна к ней и проходит через основания 5 и 6 погрузчика. Обозначены также глубина 28, высота 29 и ширина 30 зоны обнаружения обнаружителя 13, максимальная дальность 31 обнаружителя 13, максимальная дальность 32 зоны чувствительности считывателя 7, позицией 33 обозначен складируемый товар.
Устройство работает следующим образом.
Веерная диаграмма 8 направленности считывателя 7 путем поворота вокруг горизонтальной оси, перпендикулярной фронтальной плоскости устройства, располагается так, как это показано на чертеже фиг.3, т.е. чтобы она при движении транспортного средства 1 захватывала зоны расположения кодовых меток 24 и 27. Следует заметить, что для упрощения понимания на чертежах фиг.1 и 3 показано расположение диаграммы 8 направленности в горизонтальной плоскости. В этом случае сканирование лучом считывателя 7 фронтальной поверхности происходит вдоль горизонтальной линии, совпадающей с сечением горизонтальной плоскости 10, как это показано на фиг.3. Однако, так как в соответствии с указанным в формуле изобретения признаком «плоскость симметрии зоны чувствительности считывателя расположена в плоскости, параллельной фронтальной плоскости устройства с возможностью поворота вокруг горизонтальной оси, перпендикулярной фронтальной плоскости устройства» за счет поворота вокруг горизонтальной оси, перпендикулярной фронтальной плоскости устройства, обеспечивается сканирование этого луча также и в вертикальном направлении, т.е. практически всегда обеспечивается сканирование всей поверхности, на которой могут находиться искомые метки. При приближении погрузчика к стеллажу 23 или поддону 26 кодовые метки 24 или 27 последовательно попадают в зону считывания считывателя 7, определяемую диаграммой 8 направленности, так как при этом зона считывания сканирует по поверхности этих объектов. Если считыватель 7 включен постоянно (п.1 формулы изобретения), обеспечивается раздельное считывание меток 24 и 27 одним считывателем 7. Однако постоянное включение считывателя 7 приводит к быстрому расходованию его ресурса работы, повышенному расходу электропитания, что особенно существенно при автономном питании устройства, а также не защищает от возможности попадания лазерного излучения в глаза персонала, находящегося вблизи зоны работы погрузчика.
Введение в устройство селективного обнаружителя 11, сигнальный выход которого через таймер 22 подключен к разрешающему входу считывателя 7, а ось симметрии диаграммы направленности наклонена относительно горизонтальной плоскости, нормальной фронтальной плоскости устройства на угол, арктангенс которого равен отношению глубины 28 зоны обнаружения к высоте 29 зоны обнаружения, а относительно вертикальной плоскости, нормальной фронтальной плоскости устройства на угол, арктангенс которого равен отношению глубины 28 зоны обнаружения к ширине 30 зоны обнаружения, а сигнальный выход обнаружителя 11 через таймер 22 подключен к разрешающему входу считывателя 7, устраняет вышеизложенный недостаток. Использование селективного обнаружителя 11 предусматривает наличие селективной метки 25 на полке стеллажа 23. В этом случае в исходном состоянии считыватель 7 выключен. При приближении погрузчика к объекту, снабженному селективной меткой 25, селективный обнаружитель 11, ось симметрии диаграммы 12 направленности которого наклонена относительно горизонтальной плоскости, нормальной фронтальной плоскости устройства на угол, арктангенс которого равен отношению глубины 28 зоны обнаружения к высоте 29 зоны обнаружения, а относительно вертикальной плоскости, нормальной фронтальной плоскости устройства на угол, арктангенс которого равен отношению глубины 28 зоны обнаружения к ширине 30, обеспечивает сканирование фронтальной поверхности зоны обнаружения, которая параллельна фронтальной плоскости устройства, что обеспечивает обнаружение селективной метки 25, после чего селективный обнаружитель 11 подает сигнал на включение таймера 22, который обеспечивает запуск в работу считывателя 7. Так как максимальная дальность 31 зоны чувствительности обнаружителя 11 к максимальной дальности 32 зоны чувствительности считывателя 7 находится в соотношении 1,1-1,8, то запуск считывателя 7 происходит несколько раньше приближения погрузчика к стеллажу 23. Выбор указанного диапазона соотношений и конкретного соотношения максимальных дальностей 31 и 32 обеспечивает включение считывателя 4 только при приближении к полке стеллажа 23. Экспериментально установлено, что указанный диапазон обеспечивает необходимую настройку устройства. Наличие таймера 22 обеспечивает работу считывателя 7 в течение некоторого времени, достаточного для считывания информации со штрих-кодовых меток 24 и 27, если поддон 26 находится на полке стеллажа 23. Следует заметить, что выбранный алгоритм работы позволяет обеспечивать считывание информации с штрих-кодовой метки 27 поддона 26 только тогда, когда поддон 26 находится на полке стеллажа 23, что полностью исключает опасность попадания лазерного излучения считывателя 7 в глаза персонала. Селективность обнаружителя 11 может быть обеспечена самыми различными техническими средствами, например, выполнением обнаружителя 11 поляризованным, а опознаваемой селективной метки 25 - в виде светоотражателя - катафота, или обнаружителя 11 радиочастотным - а метки 25 - в виде proximity-чипа и т.п. Выбор типа считывателя и его выполнение не является предметом данного изобретения. Наличие селективного обнаружителя 11 особенно существенно при работе погрузчика с пустым местом хранения из-за того, что для запуска считывателя 4 в этом случае необходимо диаграмму направленности обнаружителя 13 ориентировать вниз, а потому он будет давать ложные запуски от пола при нижнем положении вил.
Обнаружитель 13 максимальной дальности, ось симметрии диаграммы 14 направленности которого нормальна к фронтальной плоскости устройства, сигнальный выход обнаружителя 13 максимальной дальности подключен к разрешающему входу считывателя 7, позволяет более надежно получить информацию о расстоянии до предмета. Если это стеллаж 23, то оператору, прежде чем начать подъем или опускание рабочих элементов 3 и 4 вилочного захвата, следует отодвинуть транспортное средство 1 на расстояние, при котором сигнал с выхода обнаружителя 13 максимальной дальности исчезнет, что исключит цепляние концами рабочих элементов 3 и 4 вилочного захвата за стеллаж 23 при работе подъемника 2.
Наличие в устройстве обнаружителя 15 минимальной дальности, ось симметрии диаграммы 16 направленности которого нормальна к фронтальной плоскости устройства, а сигнальный выход подключен к блокирующему входу считывателя 7, дальность обнаружения которого находится в пределах допуска установки поддона 26 на вилочном захвате, обеспечивает выключение считывателя 7 в транспортном положении поддона 26 (на погрузчике), что экономит ресурс считывателя 4 и электроэнергию на его питание, а также дополнительно аварийную сигнализацию при «сползании» поддона 26 с вилочного захвата. Информация с выхода считывателя 7 поступает на дисплей транспортного средства 1 и по радиоканалу в вычислительный центр склада (на чертежах не показаны).
Таким образом, предлагаемое конструктивное выполнение устройства позволяет обеспечить считывание информации со стеллажа 23 и поддона 26 одним считывателем 7, разместить все элементы устройства в полости между основаниями 5 и 6 рабочих элементов 3 и 4, что исключает отрицательное влияние на функциональные возможности погрузчика и позволяет повысить надежность и безопасность его работы. Кроме того, предлагаемое устройство является универсальным решением поставленной задачи, т.к. может быть установлено на всех известных конструкциях погрузчиков и позволяет без каких-либо усовершенствований использовать все дополнения, направленные на повышение надежности и качества работы собственно считывателя, как-то использование в считывателе поляризованного света, кодирование места метки, беспроводную связь считывателя с устройствами обработки его сигнала и т.д.
Конструктивно устройство представляет собой механически защищенный блок, устанавливаемый между вилами погрузчика.
Ниже описан пример конкретной реализации предложенного устройства.
При взятии поддона с места хранения, не оборудованного штрих-кодом, устройство выдает пакет сообщений из служебной информации и штрих-код поддона.
При взятии поддона с места хранения, оборудованного штрих-кодом, устройство выдает пакет сообщений из служебной информации, штрих-код поддона и штрих-код места хранения.
При установке поддона на место хранения, не оборудованное штрих-кодом, устройство выдает пакет сообщений из служебной информации и штрих-код поддона.
При установке поддона на место хранения, оборудованное штрих-кодом, устройство выдает пакет сообщений из служебной информации, штрих-код поддона и штрих-код места хранения.
Обмен данными и служебной информацией между изделием и бортовым терминалом VRC-6940 осуществляется по протоколу RS-232 со скоростью 9600 кБод. Длительность пакета сообщений 3-7 секунд. Общее количество сообщений - от 100 и более (зависит от скорости выполнения операций с паллетой и местом хранения).
При некоторых стационарных положениях погрузчика относительно других предметов возможно постоянное включение считывателя 7. Такое состояние распознается комплексом как аварийная ситуация по вине оператора. Также возможен кратковременный запуск считывателя 7 от проходящих людей или техники, передвигающейся вблизи от погрузчика. В этих случаях будет передаваться служебная информация, не содержащая данных штрих-кода. Более подробные данные о служебной информации и необходимые сведения о настройке непосредственно считывающей части содержатся в документации на используемый в качестве считывателя 7 сканер DS 2400a производства DataLogic.
Используемый радиочастотный интерфейс между блоком сканера и блоком сопряжения позволяет использовать для автономного конфигурирования и настройки сканера его штатные средства - установленную на компьютере, оборудованном СОМ-портом, программу WinHost без дополнительного оборудования и программных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерный обнаружитель оптических сигналов | 2023 |
|
RU2816284C1 |
| СПОСОБ АНТИКОЛЛИЗИОННОЙ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634308C2 |
| СПОСОБ И УСТРОЙСТВО, ПОЗВОЛЯЮЩЕЕ ИСПОЛЬЗОВАТЬ ОБЪЕКТЫ С ПРЕДВАРИТЕЛЬНО УСТАНОВЛЕННЫМИ КООРДИНАТАМИ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПРОМЫШЛЕННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2571580C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВОЗБУЖДЕНИЯ ПРИЕМОПЕРЕДАЮЩЕЙ МЕТКИ | 2012 |
|
RU2578587C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВОЗБУЖДЕНИЯ ПРИЕМОПЕРЕДАЮЩЕЙ МЕТКИ | 2015 |
|
RU2617719C2 |
| Поддон для хранения штучных грузов | 1967 |
|
SU846410A1 |
| Поперечно-выдвижная каретка погрузчика | 1973 |
|
SU492473A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТ И СПОСОБЫ УПРАВЛЕНИЯ ЕЮ | 2011 |
|
RU2555068C2 |
| СИСТЕМА ФЛИТ МЕНЕДЖМЕНТА | 2007 |
|
RU2461066C2 |
| Поддон | 1985 |
|
SU1373632A1 |
Изобретение может быть использовано при захвате, перемещении и складировании изделий с помощью погрузчиков с вилочным захватом. Техническим результатом является повышение производительности труда и безопасности работы. Сущность изобретения состоит в том, что в устройство контроля работы погрузчиков, содержащее считыватель, выход которого соединен по радиоканалу с вычислительным центром, введен отражатель, плоскость симметрии диаграммы направленности считывателя, расположенная в плоскости, параллельной фронтальной плоскости устройства, имеет возможность поворота вокруг горизонтальной оси, перпендикулярной фронтальной плоскости устройства, и оптически связана с отражателем, нормаль к отражающей поверхности которого образует с плоскостью симметрии диаграммы направленности считывателя угол, равный половине арктангенса отношения длины зоны чтения считывателя к ширине зоны контроля. В устройство может быть введен таймер и селективный обнаружитель, ось симметрии диаграммы направленности которого наклонена относительно горизонтальной плоскости, нормальной фронтальной плоскости устройства на угол, арктангенс которого равен отношению глубины зоны обнаружения к высоте зоны обнаружения, а относительно вертикальной плоскости, нормальной фронтальной плоскости устройства на угол, арктангенс которого равен отношению глубины зоны обнаружения к ширине зоны обнаружения, максимальная дальность зоны чувствительности обнаружителя к максимальной дальности зоны чувствительности считывателя находится в соотношении 1,1-1,8, сигнальный выход обнаружителя через таймер подключен к разрешающему входу считывателя. Кроме того, в устройство могут быть введены обнаружитель максимальной дальности, ось симметрии диаграммы направленности которого нормальна к фронтальной плоскости устройства, сигнальный выход обнаружителя максимальной дальности подключен к разрешающему входу считывателя, и обнаружитель минимальной дальности, ось симметрии диаграммы направленности которого нормальна к фронтальной плоскости устройства, сигнальный выход обнаружителя минимальной дальности подключен к блокирующему входу считывателя. 3 з.п. ф-лы, 4 ил.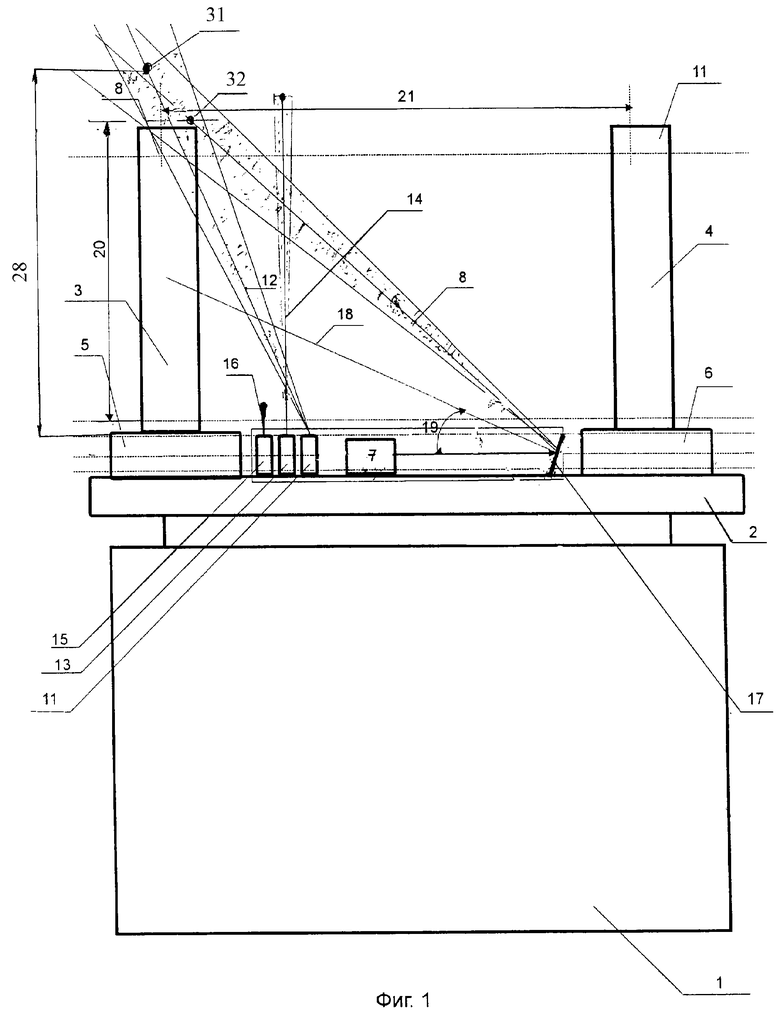
| JP 10338494, 22.12.1998 | |||
| Приводное устройство для держателя с зубилом в станках для насекания напильников путем нажима | 1934 |
|
SU44108A1 |
| СПОСОБ ПОЛУЧЕНИЯ КВЕРЦЕТИНА | 2006 |
|
RU2333207C2 |
| US 5905248, 18.05.1999. | |||

