Изобретение относится к транспортному машиностроению и, в частности, может быть использовано в тракторах, самоходных машинах, автомобилях, колесно-гусеничных тягачах и транспортерах.
Известна самоходная машина (патент СССР 1039746, МПК В 60 К 17/34, 1982), содержащая привод дополнительного ведущего моста, который состоит из элемента скольжения, выполненного в виде дифференциала, одно звено которого соединено с вторичным валом коробки передач, второе звено через передачу с постоянным передаточным числом (карданный вал и главная передача) - с межколесным дифференциалом дополнительного ведущего моста, а реактивное звено соединено с валом насоса скольжения, в напорной магистрали которого установлен регулируемый дроссель, управляемый регулятором тягового усилия, в котором установлено сравнивающее устройство, один вход которого соединен с измерителем разности частоты вращения входного и выходного валов элемента скольжения, а второй - с измерителем крутящего момента на дополнительном мосту.
Указанное техническое решение является наиболее близким к заявленному по технической сущности и достигаемому результату. Однако недостатком данной самоходной машины является то, что величина передаваемого на дополнительный ведущий мост крутящего момента пропорциональна буксованию движителя основного ведущего моста, что ведет к нерациональному распределению крутящего момента при малых величинах или отсутствии буксования движителя основного ведущего моста. Кроме того, при движении в обычных дорожных условиях крутящий момент, передаваемый на дополнительный ведущий мост, постоянен и, как правило, направлен только на преодоление сопротивления качению колес, что отрицательно сказывается на управляемости самоходной машины. К недостаткам данной конструкции необходимо отнести и то, что при различных коэффициентах сцепления колес на основном и дополнительном движителях с опорной поверхностью конструкция не обеспечивает оптимального распределения мощности между движителями до тех пор, пока колеса основного движителя не начнут буксовать.
Технический результат изобретения направлен на повышение проходимости машины, оптимизации распределения продольно-толкающих усилий развиваемых различными видами движителей, а также повышения ходимости менее износостойкого (гусеничного) движителя за счет регулирования величины кинематического рассогласования между разнотипными движителями.
Технический результат достигается тем, что транспортное средство, содержащее двигатель, связанный через коробку передач, планетарную передачу, дифференциал с приводом ведущих мостов колесного движителя и планетарную передачу с приводом ведущего моста гусеничного движителя, снабжена гидрообъемной передачей с регулируемым гидромотором, которая включается в работу автоматически после подачи сигнала на электромагнитный распределитель от сравнивающего устройства, при этом последний получает сигналы о нагруженности валов привода колесного и гусеничного движителей от датчиков, установленных на соответствующих валах, либо вручную после отключения из системы сравнивающего устройства и непосредственного воздействия на золотник электромагнитного распределителя. Сравнивающее устройство выполнено электронным, а гидрообъемная передача с регулируемым гидромотором.
На чертеже дана принципиальная схема предлагаемого транспортного средства.
Транспортное средство содержит двигатель 1, коробку передач 2, выходной вал которой соединен с солнечной шестерней 3 двух планетарных механизмов I, II. Эпициклические шестерни 4 и 5 находятся в постоянном зацеплении с шестерней 6 вала гидромотора 7. На колесный движитель 8 крутящий момент передается от солнечной шестерни 3, через сателлиты 9, водило 10 второго планетарного механизма, дифференциал 11 и валы привода ведущих колес 12. На гусеничный движитель 13 крутящий момент передается от солнечной шестерни 3, через сателлиты 14, водило 15 первого планетарного механизма и вал привода гусеничного движителя 16. Для регулирования величины кинематического рассогласования, обеспечивающее равномерность продольно-толкающих усилий, предназначено устройство, состоящее из гидромотора 7, к которому подводятся нагнетающая и отводящая магистрали от насоса 17, последний получает вращение от вторичного вала коробки передач 2, а также магистраль подпитки 18. Для регулирования гидромотора 7 предназначено устройство, состоящее из датчиков 19 и 20 крутящего момента на выходных валах колесного 8 и гусеничного 13 движителей, согласующего устройства 21, и гидравлического привода, состоящего из гидроцилиндров 22 и 23, штоки которых связаны с люлькой 24, электромагнитного распределителя 25, включающего золотник 26, устройство управления золотником 27, рычаг 28 для ручного управления золотником, питание гидропривода и подпитка магистрали гидромотора 7 осуществляется насосом 29 по магистралям 18, 30, 31, масло подается и сливается в бак 32.
Работает силовая передача следующим образом. При движении в условиях, когда при распределении крутящего момента нагрузка на валы приводов 12, 16 колесного 8 и гусеничного 13 движителей равна. В этом случае сигналы от датчиков 19, 20 на сравнивающее устройство 21 будут поступать равными. В результате этого сравнивающее устройство через устройство управления золотником 27 установит золотник 26 электромагнитного распределителя 25 в положение, обеспечивающее подачу масла насосом 29 из бака 32 в цилиндры 22, 23 таким образом, что люлька 24 будет находиться в нейтральном положении, тем самым обеспечивая нулевую подачу гидромотора 7, который в свою очередь через вал и шестерню 6 будет удерживать эпициклические шестерни 4, 5 в неподвижном состоянии.
Таким образом, крутящий момент от двигателя 1 через коробку передач 2 подводится к солнечной шестерне 3. От солнечной шестерни крутящий момент распределяется через обкатывающиеся по эпициклу 4 сателлиты 9, увлекая за собой водило 10 второго планетарного механизма, через дифференциал 11, валы 12 привода на колесный движитель 8 и через обкатывающиеся по эпициклу 5 сателлиты 14, увлекая за собой водило 15 первого планетарного механизма, через вал 16 привода на гусеничный движитель 13. В этом случае крутящий момент распределяется симметрично на колесный и гусеничный движители.
При движении в условиях, когда при распределении крутящего момента нагрузка, допустим, на вал 16 привода гусеничного движителя 13 больше, чем на вал 12 привода колесного движителя 8, то, соответственно, и сигналы от датчиков 19, 20 на сравнивающее устройство 21 будет поступать разными по величине. Сравнивающее устройство 21, обработав эти сигналы, подает управляющее воздействие на устройство управления золотником 27 электромагнитного распределителя 25, обеспечивающее перемещение золотника 26 для соединения нагнетающей магистрали 30 с цилиндром 23, а сливной магистрали 31 с цилиндром 22 с целью перемещения люльки 24 регулируемого гидромотора 7. Гидромотор, получая давление масла от насоса 17, приводит во вращение шестерню 6 в направление, обеспечивающее вращение эпициклической шестерни 4 по направлению вращения водила 10, тем самым увеличивая частоту вращения водила 10 второго планетарного механизма, а вращение эпициклической шестерни 5 против направлению вращения водила 15 первого планетарного механизма, тем самым уменьшая частоту вращения последнего. Таким образом, от водила 15 крутящий момент, реализуемый гусеничным движителем 13, уменьшается, а значит, и уменьшается нагрузка на вал 16 привода гусеничного движителя, от водила 10 крутящий момент, реализуемый колесным движителем 8, увеличивается, тем самым больше нагружая вал 12 привода колесного движителя. Это будет происходить до тех пор, пока сигналы от датчиков 19, 20 не будут приходить равными на сравнивающее устройство 21 и система не начнет работать при равных нагрузках на валы 12 и 16, как было описано в первом случае. В результате этого происходит автоматическое регулирование величины кинематического рассогласования с целью выравнивания нагрузок на валах привода колесного и гусеничного движителей, тем самым обеспечивая равномерное распределение продольно-толкающих усилий развиваемых различными видами движителей, а также повышение ходимости гусеничного движителя.
Система предусматривает ручное управление золотником 26 в случаях, когда необходимо реализовать подводимую мощность на обладающем меньшим удельным давлением на опорную поверхность гусеничном движителе. Для этого выключается из схемы сравнивающее устройство 21 при помощи выключателя 33. Воздействуя вручную на золотник 26 таким образом, чтобы гидропривод управления гидромотором сработал для вращения шестерни 6 гидромотора 7, обеспечивающей вращение эпициклической шестерни 5 по направлению вращения водила 15 первого планетарного механизма, тем самым увеличивая частоту вращения этого водила, а вращение эпициклической шестерни 4 - против направления вращения водила 10 второго планетарного механизма, уменьшая частоту вращения последнего. Таким образом, происходит изменение величины кинематического рассогласования с целью реализации большей части крутящего момента на гусеничном движителе, тем самым повышая проходимость машины. Для работы силовой передачи в автоматическом режиме регулирования величины кинематического рассогласования включается в систему сравнивающее устройство 21 при помощи выключателя 33.
Технико-экономические показатели предлагаемого транспортного средства с регулируемой величиной кинематического рассогласования в приводе: уменьшение расхода топлива на 3-5%; износа шин на 15-20%.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОАВТОМАТИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2011 |
|
RU2517025C2 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРООБЪЕМНЫМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА ВСПОМОГАТЕЛЬНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2003 |
|
RU2293030C2 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДИНАМИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2003 |
|
RU2292271C2 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОДИНАМИЧЕСКИМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА КОЛЕСНО-ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2276019C1 |
| СИЛОВОЙ БЛОК ДЛЯ ТРАНСПОРТНОЙ МАШИНЫ | 2002 |
|
RU2261815C2 |
| Трансмиссия гусеничной машины | 1984 |
|
SU1162628A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ДВУМЯ И БОЛЕЕ ДИАПАЗОНАМИ | 1995 |
|
RU2148503C1 |
Изобретение относится к транспортному машиностроению и, в частности, может быть использовано в тракторах, самоходных машинах, автомобилях, колесно-гусеничных тягачах и транспортерах. Транспортное средство содержит двигатель, который связан через коробку передач и первый планетарный механизм с приводом ведущего моста гусеничного движителя. Двигатель еще связан через упомянутую коробку передач, второй планетарный механизм и дифференциал с приводом ведущих мостов колесного движителя. Транспортное средство снабжено гидрообъемной передачей с регулируемым гидромотором. Гидромотор связан через шестерню, установленную на его валу, с эпициклическими шестернями вышеуказанных планетарных механизмов. Гидрообъемная передача включается в работу автоматически, после подачи сигнала на электромагнитный распределитель от сравнивающего устройства, которое получает сигналы о нагруженности валов привода колесного и гусеничного движителей от датчиков, установленных на соответствующих валах. Гидрообъемная передача также может включаться в работу и вручную, после отключения из системы сравнивающего устройства и непосредственного воздействия на золотник электромагнитного распределителя. В результате достигается повышение проходимости машины, оптимизация распределения продольно-толкающих усилий, развиваемых различными видами движителей, а также повышение ходимости менее износостойкого (гусеничного) движителя за счет регулирования величины кинематического рассогласования между разнотипными движителями. 1 ил.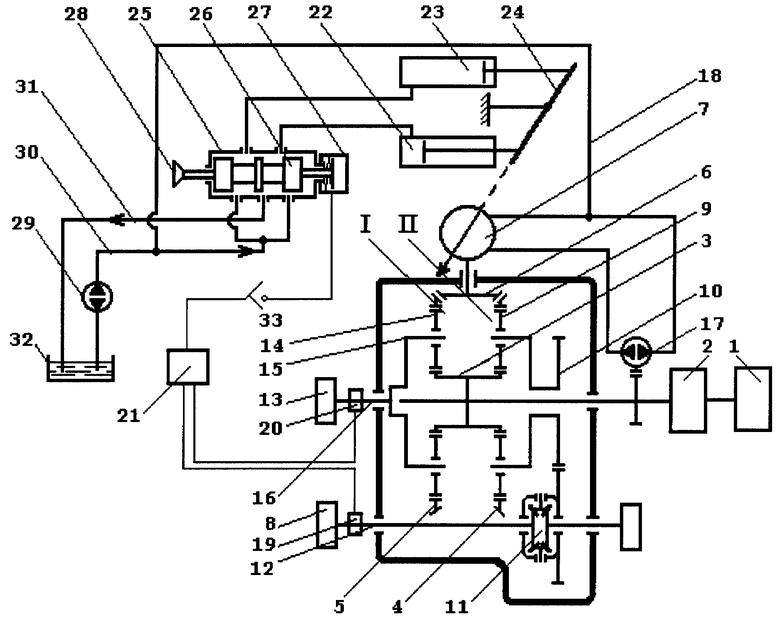
Транспортное средство, содержащее двигатель, связанный через коробку передач и первый планетарный механизм с приводом ведущего моста гусеничного движителя и через упомянутую коробку передач, второй планетарный механизм и дифференциал - с приводом ведущих мостов колесного движителя, отличающееся тем, что оно снабжено гидрообъемной передачей с регулируемым гидромотором, связанным через шестерню, установленную на его валу, с эпициклическими шестернями вышеуказанных планетарных механизмов, причем гидрообъемная передача включается в работу либо автоматически после подачи сигнала на электромагнитный распределитель от сравнивающего устройства, которое получает сигналы о нагруженности валов привода колесного и гусеничного движителей от датчиков, установленных на соответствующих валах, либо вручную после отключения из системы сравнивающего устройства и непосредственного воздействия на золотник электромагнитного распределителя.
| Самоходная машина и ее варианты | 1982 |
|
SU1039746A1 |
| ПРИВОД ПЕРЕДНЕГО ВЕДУЩЕГО МОСТАТРАКТОРА | 1971 |
|
SU431043A1 |
| Механизм для перераспределения нагрузки между ведущими мостами транспортного средства | 1980 |
|
SU944955A1 |
| Привод переднего ведущего моста трактора | 1982 |
|
SU1049276A2 |
| Полуавтоматический гидропривод объемного регулирования | 1982 |
|
SU1043397A1 |
| US 3869013 A1, 04.03.1975 | |||
| 0 |
|
SU189176A1 | |
| US 4874059 A, 17.10.1989. | |||

