Изобретение относится к области транспортного машиностроения и может быть использовано при синтезе систем управления движением быстроходных гусеничных машин (БГМ), оснащенных дизельным двигателем со всережимным регулятором, гидромеханической трансмиссией (ГМТ) и дифференциальным механизмом поворота с гидрообъемным приводом.
Известна система управления движением танка Ml-Abrams фирмы Allison (аналог, Теория и конструкция танка. - Т. 5. Трансмиссии военных гусеничных машин. - М.: Машиностроение, 1985. 367 с. Рис. 2.25, стр. 55), которая содержит тепловой двигатель со всережимным регулятором, входной редуктор, соединяющий двигатель с гидромеханической трансмиссией состоящей из гидротрансформатора и механической коробки передач. Ведомый вал гидромеханической трансмиссии соединен с эпициклическими шестернями двух суммирующих планетарных рядов. Водила этих рядов соединены с ведущими колесами. Солнечные шестерни суммирующих рядов соединены через дифференциальный механизм с гидромотором гидрообъемной передачи, который в свою очередь гидравлически соединен с регулируемым гидронасосом. Регулирование скорости поступательного движения машины осуществляется изменением подачи топлива, выбором номера передачи. Регулирование кривизны траектории движения и угловой скорости поворота (соответственно и курсового угла) осуществляется изменением передаточного числа регулируемой гидрообъемной передачи. Привод гидронасоса этой передачи осуществляется от ведомого вала гидромеханической трансмиссии, что, по мнению специалистов США, обеспечивает высокую управляемость.
Недостаток этой системы состоит в том, что при движении гусеничной машины со значительным сопротивлением, например на подъемах, частота вращения турбины снижается и производительность гидронасоса может быть не достаточной для выполнения поворота машины.
Наиболее близкой по технической сути и достигаемому результату является система управления поворотом БМП-3, прототип (Боевая машина пехоты БМП-3. Руководство по эксплуатации. 4.1. Техническое описание. - Ростов-на-Дону: Изд-во ООО БелРусь, 2010 г. - рис. 6.6, стр. 295, рис. 7.5, стр. 327-329). В этой системе привод гидронасоса гидрообъемного привода осуществляется от вала двигателя.
Регулирование кривизны траектории движения и угловой скорости поворота (соответственно, и курсового угла) осуществляется изменением передаточного числа регулируемого насоса гидрообъемной передачи. Управление гидрообъемным приводом осуществляется командным органом (штурвалом). Особенность этой системы управления состоит в том, что при заблокированном гидротрансформаторе чувствительность кривизны траектории движения машины к управляющему воздействию снижается с ростом номера передачи включенной в трансмиссии. При уменьшении частоты вращения вала двигателя при возрастании сопротивления движению машины или при уменьшении подачи топлива водителем происходит разблокировки гидротрансформатора. В этих условиях кривизна траектории движения машины существенно возрастает. Регулирование скорости поступательного движения машины осуществляется водителем путем изменением подачи топлива, выбором номера передачи, а также автоматически гидротрансформатором.
Водитель, воздействуя посредством приводов управления на гидропривод, изменяет режим его работы и тем самым изменяет направление движения машины. При этом контроль за поведением машины осуществляет водитель. Для компенсации возникающих отклонений траектории водитель воздействует на органы управления, пытаясь реализовать требуемую траекторию движения с необходимой для безопасности точностью. Однако вследствие ограниченности психофизиологических свойств водителя, его утомляемости в процессе длительного движения, принятые решения и реализуемое им управляющее воздействие характеризуется большим количеством ошибок. В частности, в процессе движения машины на определенной передаче при изменении направления дороги водитель оценивает ситуацию, прогнозирует траекторию движения машины и принимает решение, поворачивая штурвал на некоторый угол. Для ограничения скоростного режима по условиям безопасности движения в повороте водитель интуитивно снижает скорость движения машины уменьшением подачи топлива и (или) включением остановочных тормозов. При этом снижается угловая скорость вала двигателя и его мощность. Снижение угловой скорости двигателя приводит к разблокировке гидротрансформатора. В соответствии со свойствами рассматриваемой системы управления поворотом, приведенными выше, возрастает чувствительность кривизны траектории к управляющему воздействию. Увеличение кривизны траектории сопровождается ростом мощности сопротивления повороту, приводит к перегрузке, заглоханию двигателя и остановке машины. Следовательно, управляющее действие по снижению скорости движения перед входом в поворот является ошибочным. В этом и состоит основной недостаток системы. Для устранения этого недостатка - предотвращения заглохания двигателя при ошибочных действиях водителя, в привод управления топливным насосом высокого давления дополнительно включается мотор-редуктор, который крепится через подшипниковую опору к неподвижному основанию, образуя двуплечий дифференциальный рычаг. Кроме того, в привод управления золотниковой коробкой переключения передач в трансмиссии включается второй мотор-редуктор. Блоки управления мотор-редукторов электрически соединяются с бортовым компьютером информационно-измерительной и управляющей системы трансмиссии.
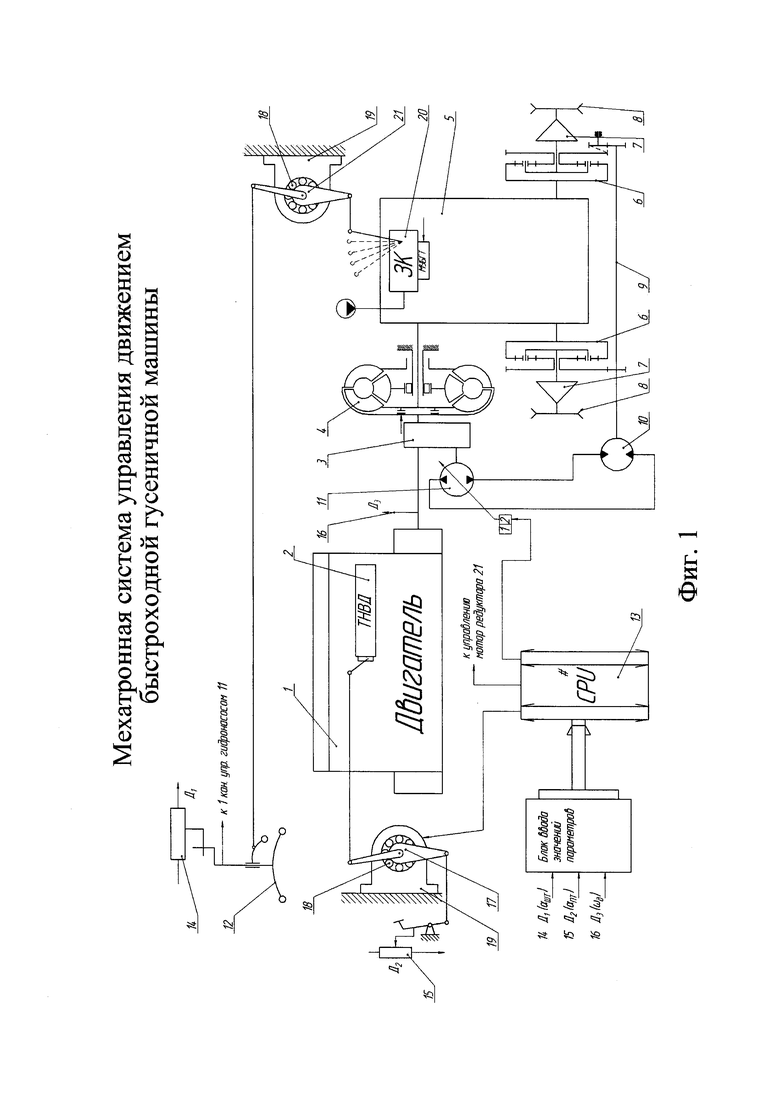
Схема предложенной системы управления движением приведена на фиг. 1. Система содержит дизельный двигатель 1 со всережимным регулятором топливного насоса высокого давления 2, входной редуктор 3, соединяющий двигатель 1 с гидромеханической трансмиссией, состоящей из гидротрансформатора 4 и механической коробки передач 5. Ведомый вал гидромеханической трансмиссии соединен с эпициклическими шестернями двух суммирующих планетарных рядов (СПР) 6. Водила этих рядов через бортовой редуктор 7 соединены с ведущими колесами 8, которые через гусеницы соединяются с грунтом. Солнечные шестерни суммирующих рядов 6 соединены через вал 9 дифференциального механизма с гидромотором 10 гидропривода, который в свою очередь гидравлически соединен с регулируемым гидронасосом 11. Ведущий вал гидронасоса 11 кинематически соединен с валом двигателя 1, а ведомый вал гидромотора 10 кинематически соединен с валом 9 дифференциального механизма поворота. На валу 9 расположены шестерни, кинематически соединенные с солнечными шестернями СПР 6 одного борта БГМ через промежуточную шестерню, а второго борта - непосредственно.
Первый канал управления гидронасоса 11 - (1) кинематически, через систему тяг соединен с задающим (командным) органом управления поворотом 12 (штурвалом). С бортовым компьютером 13 электрически соединены сенсоры положения и перемещения штурвала 14 (αшт), педали подачи топлива 15 (αпт), частоты вращения вала двигателя 16 (nд). Ведомые элементы дифференциального механизма кинематически соединены с солнечными шестернями СПР 6. В привод управления топливным насосом высокого давления 2 дополнительно включается мотор-редуктор 17, который крепится через подшипниковую опору 18 к неподвижному основанию 19, образуя двуплечий дифференциальный рычаг. Кроме того, в привод управления золотниковой коробкой 20 переключения передач в трансмиссии включается второй мотор-редуктор 21. Блоки управления первым и вторым мотор-редукторами 17 и 21 электрически соединяются с выходом бортового компьютера 13 информационно-измерительной и управляющей системы трансмиссии.
Работает предлагаемая система следующим образом. При вращении вала двигателя 1 с угловой скоростью (ωд), при включенной определенной передачи в коробке передач 5, гидротрансформатор 4 заблокирован, гидронасос 11 гидропривода вращается, но при положении штурвала 14 (αшт=0) солнечные шестерни суммирующих планетарных рядов 6, как и выходной вал гидромотора 10, остановлены. Гусеничная машина движется прямолинейно с определенной скоростью. При изменении направления дороги водитель, анализируя характер изменения траектории дороги и прогнозируя реакцию машины на управляемое воздействие, при отклонении дороги от выбранного ранее направления движения, создает в соответствии с навыками вождения упреждающее управляющее воздействие - поворачивает штурвал 14 на некоторый угол αшт. Соответствующий сигнал сенсора 14, как и положение педали подачи топлива αпт 15, частоты вращения вала двигателя nд 16 поступают в бортовой компьютер 13.
При повороте штурвала 12 соответствующий сигнал поступает на первый канал блока управления гидронасоса 11. Насос начинает подавать рабочую жидкость по силовым магистралям в гидромотор 10, его выходной вал и вал 9 дифференциального механизма начинают вращаться. Учитывая, что солнечные шестерни суммирующих планетарных рядов 6 соединены с валом 9 одного борта непосредственно, а второго - через паразитную шестерню, солнечные шестерни обоих бортов начинают вращаться в разные стороны. При этом гусеничная машина входит в поворот. При интуитивном ошибочном уменьшении водителем подачи топлива уменьшается угловая скорость и мощность на выходном валу двигателя 1. Это приводит к разблокировке трансформатора 4. Вследствие свойств системы управления поворотом с приводом гидронасоса 11 от вала двигателя 1 повышается чувствительность кривизны траектории к управляющему воздействию. При этом кривизна траектории и мощность сопротивления повороту машины возрастают, что может привести к заглоханию двигателя. Для предотвращения заглохания двигателя 1 по сигналам датчиков угла поворота штурвала 14, угловой скорости вращения вала двигателя 16 бортовой компьютер 13 подает команду на блок управления первого мотор-редуктора 17 для увеличения подачи топлива, компенсирующую ошибочные действие водителя. Кроме того, бортовой компьютер 13 подает команду на второй мотор-редуктор 21 золотниковой коробки 20 для включения передачи на номер ниже. В этом случае заглохание двигателя предотвращается и осуществляется движение машины с требуемой кривизной траектории.
Эффективность предложенного решения заключается в исключении заглохания двигателя и остановки машины при ошибочных управляющих действиях водителя. Это обеспечивает подвижность машины независимо от квалификации водителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2529929C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДВИЖЕНИЯ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2011 |
|
RU2480361C1 |
| ДВУХПОТОЧНАЯ ТРАНСМИССИЯ ТАНКА | 2017 |
|
RU2652542C1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| Гидромеханическая трансмиссия транспортного средства | 1975 |
|
SU610689A1 |
| Гидромеханическая трансмиссия транспортного средства | 1975 |
|
SU598781A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2224678C1 |
| Трансмиссия гусеничной машины | 1987 |
|
SU1523409A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ПОВОРОТА МОБИЛЬНОЙ МАШИНЫ И СПОСОБ УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫМ МЕХАНИЗМОМ ПОВОРОТА | 2019 |
|
RU2721207C1 |
Изобретение относится к области транспортного машиностроения. Мехатронная система управления движением быстроходной гусеничной машины содержит дизельный двигатель со всережимным регулятором, входной редуктор, соединяющий двигатель с гидромеханической трансмиссией, состоящей из гидротрансформатора и механической коробки передач, управляемой золотниковой коробкой. Ведомый вал гидромеханической трансмиссии соединен с эпициклическими шестернями двух суммирующих планетарных рядов, водила этих рядов соединены с ведущими колесами, солнечные шестерни суммирующих рядов соединены через дифференциальный механизм с гидромотором гидрообъемной передачи, который в свою очередь гидравлически соединен с регулируемым гидронасосом, гидронасос которого кинематически через механический редуктор соединен с валом двигателя машины. В привод управления топливного насоса высокого давления включен мотор-редуктор. В привод управления золотниковой коробкой переключения передач трансмиссии включен второй мотор-редуктор. Блоки управления мотор-редукторов электрически соединены с выходом бортового компьютера информационно-измерительной управляющей системы трансмиссии. Достигается возможность исключения заглохания двигателя и остановки машины при ошибочных управляющих действиях водителя. 1 ил.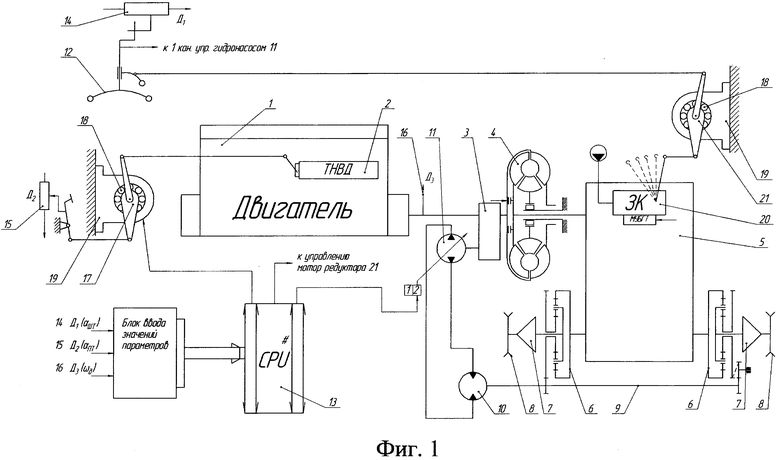
Мехатронная система управления движением быстроходной гусеничной машины, содержащая дизельный двигатель со всережимным регулятором, входной редуктор, соединяющий двигатель с гидромеханической трансмиссией, состоящей из гидротрансформатора и механической коробки передач, управляемой золотниковой коробкой, ведомый вал гидромеханической трансмиссии соединен с эпициклическими шестернями двух суммирующих планетарных рядов, водила этих рядов соединены с ведущими колесами, солнечные шестерни суммирующих рядов соединены через дифференциальный механизм с гидромотором гидрообъемной передачи, который в свою очередь гидравлически соединен с регулируемым гидронасосом, гидронасос которого кинематически через механический редуктор соединен с валом двигателя машины, а первый канал управления - с задающим органом управления поворотом, например штурвалом, а второй канал - с бортовым компьютером, со входом которого соединены сенсоры положения и перемещения: штурвала, педали топлива, числа оборотов двигателя, отличающаяся тем, что в привод управления топливного насоса высокого давления включен мотор-редуктор, в привод управления золотниковой коробкой переключения передач трансмиссии включен второй мотор-редуктор, а блоки управления мотор-редукторов электрически соединены с выходом бортового компьютера информационно-измерительной управляющей системы трансмиссии.
| Упругое экипажное колесо | 1925 |
|
SU7823A1 |
| US 20090301797 A1, 10.12.2009 | |||
| Сепаратор к автоматической письмосортировочной машине | 1960 |
|
SU134502A1 |
| Автоматический сдвоенный монжус | 1960 |
|
SU134136A1 |
| US 6095945 A1, 01.08.2000. | |||

