Изобретение относится к области автоматики и вычислительной техники и может быть использовано для управления технологическими процессами в различных областях промышленности, в том числе газовой промышленности. Технический результат заключается в достижении нового качества и надежности управления технологическими объектами.
Известен способ /1/ автоматического управления агрегатом на всех режимах работы оборудования путем сбора и алгоритмической обработки медленноменяющихся технологических параметров, включения/отключения с пульта дистанционного управления подачей сигналов управления в исполнительные механизмы, отображения технологических параметров и информации функциональной диагностики, сигнализации по нештатным ситуациям, автоматической защиты по критическим технологическим параметрам. Недостатком способа является его узкая специализация для решения задач антипомпажной защиты проточных частей объектов.
Известно устройство /2/ комплексного контроля исправности датчиков измерения медленноменяющихся параметров в составе системы управления самолета без избыточного контрольного оборудования на его борту путем сравнения разности векторов измеренной и вычисленной по показаниям датчиков перегрузки, действующей на самолет, с ее заранее известным значением. При отличии этой разности от известного значения срабатывает сигнализация об отказе датчиков системы автоматического управления. Недостатком устройства является узкая специализация устройства и диагностирование отказов в целом всего пакета датчиков, существенно снижающее гибкость использования системы автоматического управления.
Известен способ контроля и поэтапного диагностирования состояния пневмогидравлического объекта /3/ и системы измерения текущих значений его медленноменяющихся параметров путем фиксирования очередности и направлений выхода параметров за их пороговые уровни. Недостатками способа являются отсутствие методики обоснованного формирования пороговых уровней, неопределенность в отношении алгоритмов идентификации дефектов и трудность практической реализации способа, особенно на переходных режимах работы объекта.
Целью предлагаемого изобретения является повышение качества автоматического управления за счет обнаружения, идентификации и учета в алгоритмах управления влияния смежных объектов, самопроизвольного изменения характеристик рабочего тела, текущего функционального состояния системы измерения параметров, рабочих и технологических процессов, протекающих в объекте.
В представленном изобретении - интегрированная система автоматического координированного управления объектом 1 - поставленная цель достигается тем, что в зависимости от состояния протекающих в нем рабочих и технологических процессов при выходе за границы допусков хотя бы одного из формируемых в блоках 5 и 6 признаков динамической активности (ПДА) объекта в блоке 7 контроля соответствия ПДА установленным границам допусков вырабатывается команда об активизации цепи интеллектуальной обратной связи путем подключения блоков 8, 9, 10 и 11 последовательного решения четырех задач разграничения альтернативных гипотез при принятии решений о нормальном или ненормальном состоянии объекта, базы данных 12, блока-корректора 13 математической модели объекта, блоков-идентификаторов 15 и 17 соответственно эволюционирующих и скачкообразно развивающихся нарушений функционального состояния объекта, блоков 14, 16 и 18 формирования сигналов управления. В целом введение цепи интеллектуальной обратной связи имеет целью реализацию алгоритмов координированного управления объектом в зависимости от результатов идентификации его текущего функционального состояния на основе математической модели, описывающей динамику объекта в низкочастотной области спектра.
Система измерения 2 медленноменяющихся параметров объекта (давление, температура и расход рабочих тел в проточных частях, обороты ротора и т.п.), выбирается избыточной в том смысле, что число измеряемых параметров объекта должно быть большим числа его степеней свободы (числа параметров, замыкающих систему уравнений математической модели). Это дает возможность формировать и нормировать основную группу признаков его динамической активности - ПДА-1 р11, р12,...,р1m в виде невязок между вычисленными и измеренными значениями параметров. Кроме того, формируется и нормируется вторая вспомогательная группа признаков ПДА-2 р21, р22,...,р2n в виде невязок между регламентированными (эталонными) значениями и измеренными значениями параметров.
Формально фиксируемые по исходным данным об измеряемых параметрах нарушения математической модели нормального функционирования объекта на практике могут быть обусловлены разными причинами, в том числе и прямо не связанными с функциональным состоянием объекта. К ним относятся:
- неисправности в системе измерения параметров объекта, обнаружение которых в ходе эксплуатации представляет собой достаточно сложную задачу, так как чаще всего неисправность проявляется не в форме простого прерывания сигнала от датчика, а в виде неточно измеренного сигнала. В этих условиях формальная увязка параметров системой уравнений математической модели объекта, естественно, приведет к невязке (нарушению норм у ПДА-1 и/или у ПДА-2) и ложному выводу о нарушении модели;
- влияние на основной объект управления других взаимодействующих с ним смежных объектов. На практике данная ситуация встречается наиболее часто (например, при работе турбодетандерных агрегатов, как объектов управления, по коллекторной схеме в условиях газовых промыслов) и требует при идентификации функционального состояния объекта упреждающего решения, позволяющего математическими методами «отсечь» оказываемое стороннее влияние;
- самопроизвольное изменение в объекте управления гидро- и термодинамических характеристик его рабочего тела (например, газа в проточных частях оборудования установок комплексной подготовки газа на газовых промыслах). И в этом случае математическая модель нормального функционирования объекта также окажется нарушенной, хотя функциональное состояние самого объекта может быть как нормальным, так и нарушенным;
- нарушение функционального состояния самого объекта, которое в свою очередь может быть параметрическим (чаще всего эволюционирующим), когда самопроизвольно изменяются только коэффициенты (параметры) в системе уравнений математической модели, или структурным (чаще всего внезапным, аварийно опасным), когда самопроизвольно видоизменяется сама структура системы уравнений модели.
Предлагаемая система автоматического координированного управления базируется на обычном в теории надежности предположении ординарности процесса возникновения дефектов в элементах сложного технического объекта, в соответствии с которым вероятность наступления более одного такого события на любом относительно малом интервале времени Δt (в контексте данного материала Δt - характерное время принятия решения о текущем функциональном состоянии объекта, составляющее обычно доли секунды) есть величина более высокого порядка малости, чем Δt.
Измеряемые параметры объекта подаются в блоки 5 и 6 формирования ПДА-1 и ПДА-2. В свою очередь ПДА-1 подаются в блоки 7, 8, 9, 10, 11, а ПДА-2 - в блоки 7 и 9. В блоке 7 реализуются алгоритмы контроля соответствия сформированных признаков ПДА-1 и ПДА-2 установленным границам допусков. При обнаружении в некоторый момент времени t выхода любого из сформированных признаков р11, p12,...,p1m или p21, р22,...,p2n за границы допускового контроля осуществляется запуск процедур идентификации вызвавшей его причины путем разложения соответствующего правила принятия решения по принципу бинарного дерева с последовательным решением в блоках 8, 9, 10, 11 четырех задач разграничения альтернативных гипотез. В блоке 8 решается первая их них - в отношении исправности или неисправности системы измерения объекта, выбранной исходно избыточной с числом каналов n>s+1 (для определенности полагаем n=s+2), где s - число степеней свободы объекта (число замыкающих уравнения его математической модели фазовых координат). С этой целью в текущем времени t формируются пары признаков динамической активности объекта в виде невязок между вычисленными xi(t), xj(t) и измеренными x°i(t), x°j(t), i≠j значениями фазовых координат
и реализуются для них процедуры допускового контроля. При этом, если для заданного 5 в момент времени t p1i<δ и p1j<δ, то принимается решение об исправности всех измерительных каналов. Если p1i>δ и p1j<δ (или p1i<δ и p1j>δ), то i-ый канал (или j-ый канал) считается неисправным при исправных остальных каналах. Если p1i>δ и p1j>δ, то каналы i, j считаются исправными при неисправном канале в составе оставшейся группы измерительных каналов. Последовательное повторение данной процедуры для второй, третьей и т.д. формируемых новых пар признаков динамической активности либо однозначно идентифицирует неисправный измерительный канал, либо подтверждает факт нарушения в момент времени t рабочих и технологических процессов в объекте, но без идентификации его функционального состояния. В первом случае производится блокировка дальнейшего использования неисправного канала, а во втором осуществляется переход к решению в блоке 9 второй задачи разграничения. Она состоит в определении возможного влияния на объект управления или отсутствии такового со стороны динамически взаимосвязанных с ним смежных объектов, обусловившего эффект нарушения ПДА границ допускового контроля. При этом, если хотя бы один из признаков р21, р22,...,р2n оказывается не в норме при всех признаках р11, р12,...,р1m в норме, в блоке 9 принимается решение о нормальном в момент времени t функциональном состоянии объекта управления, но оказываемом на него влиянии смежных взаимосвязанных с ним объектов. Одновременно производится формирование в блоке 14 сигнала управления объектом по парированию его динамической активности или переводу на щадящий режим работы. Если же хотя бы один из признаков в группе р11, р12,...,р1m оказывается не в норме, осуществляется переход к решению в блоке 10 третьей задачи разграничения в отношении неизменности или возможного самопроизвольного изменения характеристик рабочего тела объекта управления. Для этого производится автоматический перевод его на специальный диагностический переходный режим работы (например, медленного дросселирования с последующим форсированием и возвратом на исходный установившийся режим). На этом режиме по цепочке 10-13-5-7-10 решается задача минимизации признаков группы р11, р12,...,р1m при условии, что вариантами в уравнениях его математической модели являются коэффициенты-характеристики рабочего тела объекта (на установившихся режимах решение данной задачи, вообще говоря, невозможно). При этом, если найденные минимальные значения признаков р11, р12,...,р1m оказываются в норме, принимаются решения о самопроизвольном изменении в момент времени t характеристик рабочего тела при нормальном функциональном состоянии самого объекта и продолжении работы с новой, адекватной объекту математической моделью. Если же нормализации признаков р11, р12,...,р1m не произошло, в блоке 10 принимаются решения о реализовавшемся в момент времени t нарушении нормального функционального состояния объекта и переходе к решению в блоке 11 четвертой задачи разграничения. Она состоит в определении принадлежности обнаруженной неисправности к одному из двух возможных типов - параметрическому (без нарушения структуры математической модели объекта) или структурному (с нарушением структуры математической модели объекта). Для этого также осуществляется автоматический перевод объекта на описанный выше специальный диагностический переходный режим работы, на котором по цепочке 11-13-5-11 решается задача минимизации признаков группы р11, р12,...,р1m, но при условии, что вариантами в уравнениях его математической модели являются коэффициенты-характеристики собственно конструкции объекта. При этом, если найденные минимальные значения признаков р11, р12,...,р1m оказываются в норме, в блоке 11 принимается решение о развитии в объекте в момент времени t неисправности параметрического типа. Ее идентификация в блоке 15 производится по найденным коэффициентам-вариантам, реализовавшим минимум признаков р11, р12,...,р1m, физическая интерпретация которых обычно не встречает затруднений. Одновременно в блоке 16 осуществляется формирование (в зависимости от полученного результата идентификации) сигналов управления объектом о переводе его на щадящий режим или аварийной защите. Если же нормализации найденных минимизированных признаков группы р11, р12,...,р1m не произошло, то в блоке 11 принимаются решения о самопроизвольном развитии в объекте в момент времени t неисправности структурного типа и запуске по цепочке 11-12-13-5-11 процедур ее идентификации. Производится формирование признаков основной группы р11, р12,...,р1m для априори сформированных в блоке 12 математических моделей, соответствующих возможным формам неисправностей объекта структурного типа (обычно их перечень может быть получен по статистическим данным штатной эксплуатации заданного типоразмера объектов, специальным ресурсным испытаниям или даже умозрительно). При этом решение о виде развившейся неисправности объекта структурного типа принимается по критерию минимума этих признаков. Одновременно в блоке 18 осуществляется формирование сигналов управления объектом по его аварийной защите.
В предлагаемом изобретении поставленная цель достигается тем, что система автоматического координированного управления объектом 1 содержит систему измерения медленно меняющихся параметров 2, органы управления объектом 4, систему автоматического управления 3 с активизированной цепью интеллектуальной обратной связи, включающую блок формирования признаков динамической активности первого рода 5, блок формирования невязок между регламентированными и измеренными значениями параметров 6, блок контроля соответствия признаков установленным границам допусков 7, блоки идентификации причин невязок методом последовательного разграничения альтернативных гипотез 8, 9, 10, 11, блок базы данных объекта управления 12, блок коррекции математической модели объекта 13, первый блок формирования сигналов управления объектом по парированию его динамической активности или переводу на щадящий режим работы 14, блок идентификации неисправностей параметрического типа 15, второй блок формирования сигналов управления объектом по его переводу на щадящий режим или аварийной защите 16, блок идентификации неисправностей структурного типа 17, третий блок формирования сигналов управления объектом по его аварийной защите 18, причем выходы системы измерения 2 соединены с системой управления 3 объекта и параллельно с блоками 5,6 цепи обратной связи, ко входу которых подключен выход блока 13, выход блока 5 подключен ко входу блоков 7, 8, 9, 10, 11, выход блока 6 подключен ко входу блоков 7 и 9, выход блока 7 подключен к входу блока 8, один из выходов которого подключен к входу блока 9, а другой к входу блока 13, один из выходов блока 9 подключен к входу блока 10, а другой к входу блока 13, один из выходов блока 10 подключен к входу блока 11, другой к входу блока 13, а третий к входу блока 14, выходы блока 11 подключены к входам блоков 13, 15 и 17, при этом выход блока 15 подключен к входу блока 16, а выходы блока 17 подключены к входам блоков 13 и 18, причем выходы блоков 16 и 18 подключены к входу блока 3, а блоки 11 и 13 имеют каналы обмена информацией с блоком 12.
Описанная система работает следующим образом.
При отклонении хотя бы одного сигнала, соответствующего одному из измеряемых параметров управляемого объекта 1, активизируется цепь интеллектуальной обратной связи и сигналы от датчиков системы измерений поступают на входы блоков 5, 6, где производится формирование невязок между регламентированными и измеренными значениями параметров, а также на вход блока 7, где осуществляется контроль соответствия признаков динамической активности установленным границам допусков. Далее сигнал с выходов блока 5 подается на входы блоков 7, 8, 9, 10 и 11, соединенных между собой последовательно, а сигнал с выхода блока 6 подается на один из входов блоков 7 и 9, где производится контроль соответствия признаков установленным границам допусков (блок 7) и идентификация причин невязок методом последовательного разграничения альтернативных гипотез (блоки 8, 9, 10 и 11 соответственно) об исправности или неисправности системы измерения объекта, о влиянии на основной объект управления других взаимодействующих с ним объектов, о самопроизвольном изменении в объекте управления гидро- и термодинамических характеристик его тела и о нарушении функционального состояния самого объекта. При этом блоки 11 и 13, обеспечивающие определение нарушения функционального состояния самого объекта и коррекцию его математической модели, соединены для обмена информацией с блоком базы данных объекта управления 12. В блоке 13, к входам которого также подключены выходы блоков 8, 10 и 11, производится коррекция математической модели процесса в соответствии с базой данных в блоке 12. Один из выходов блока 9 подключен к входу блока 14, в котором осуществляется формирование сигналов управления объектом и выход которого соединен с входом системы управления 3. В блоках 15 и 17, соединенных с выходами блока 11, производится идентификация неисправностей параметрического типа и идентификация структурного типа соответственно, что позволяет обеспечить формирование сигнала по переводу объекта на щадящий режим или по аварийной защите в блоке 16 или формирование сигнала по аварийной защите в блоке 18, выходы которого соединены с входами системы управления объектом, что и позволяет обеспечить достижение цели настоящего изобретения.
Литература
1. Заявка РФ №2001125078.
2. Патент РФ №2103718.
3. Патент РФ №2133952.
Изобретение относится к области автоматики и вычислительной техники и может быть использовано для управления технологическими процессами в различных областях промышленности, в том числе газовой промышленности. Технический результат заключается в повышении качества и надежности управления технологическими объектами. Технический результат достигается тем, что система автоматического координированного управления базируется на обычном в теории надежности предположении ординарности процесса возникновения дефектов в элементах сложного технического объекта, в соответствии с которым вероятность наступления более одного такого события на любом относительно малом интервале времени Δt (в контексте данного материала Δt - характерное время принятия решения о текущем функциональном состоянии объекта, составляющее обычно доли секунды) есть величина более высокого порядка малости, чем Δt. 1 ил.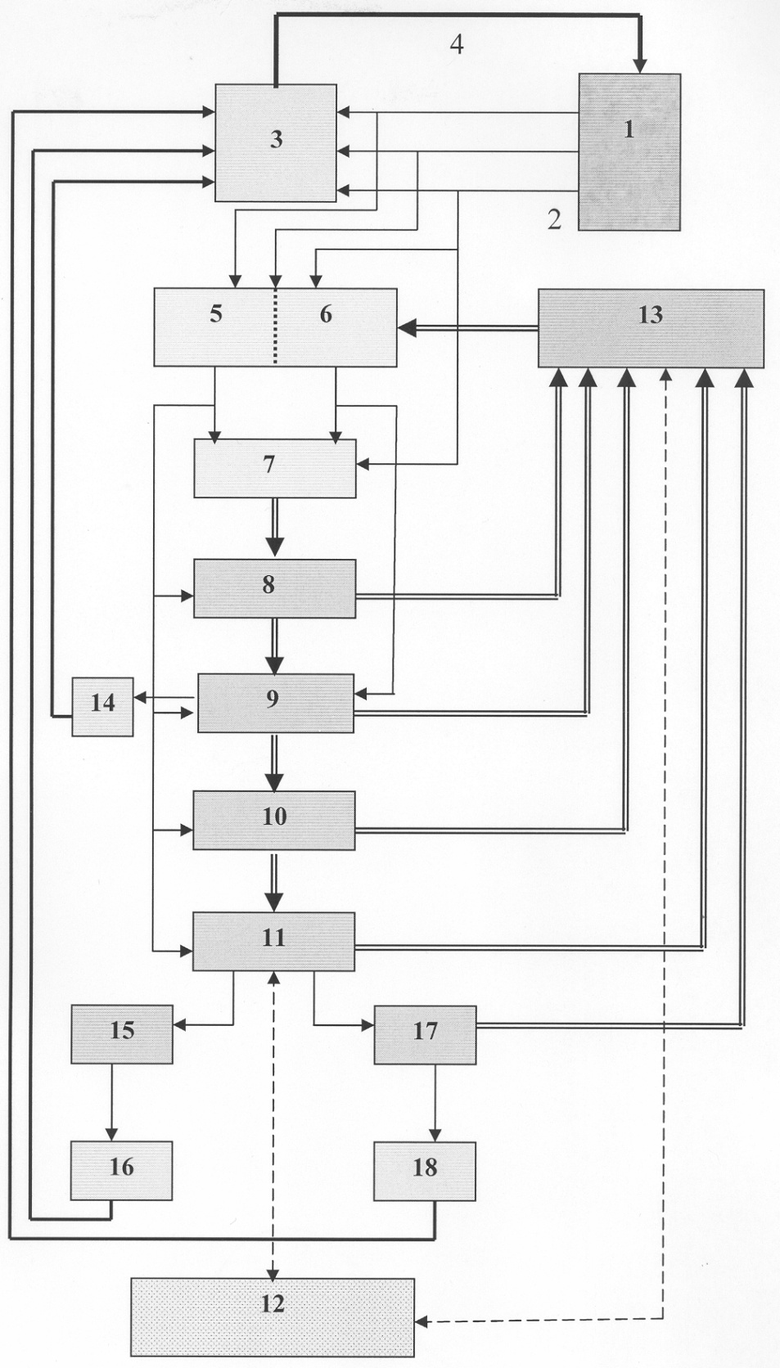
Интегрированная система автоматического координированного управления объектом, взаимодействующим в общем случае с другими смежными объектами, содержащая систему измерения его медленноменяющихся параметров (давления, температуры и расходы рабочих тел в проточных частях, обороты ротора и т.п.), увязанных системой уравнений, описывающих динамику протекающих в объекте рабочих процессов в низкочастотной области спектра, систему автоматического управления с цепью обратной связи, отличающаяся тем, что цепь обратной связи активизируется интеллектуально и включает блок формирования признаков динамической активности первого рода в виде невязок между вычисленными и измеренными параметрами объекта, блок формирования признаков динамической активности второго рода в виде невязок между регламентированными и измеренными значениями параметров, блок контроля соответствия сформированных признаков установленным границам допусков, блоки идентификации причин невязок методом последовательного разграничения альтернативных гипотез, блок базы данных объекта управления, блок коррекции математической модели объекта, блок формирования сигналов управления объектом, блок идентификации неисправностей параметрического типа, блок формирования сигналов управления объектом по его переводу на щадящий режим или аварийной защите, блок идентификации неисправностей структурного типа, блок формирования сигналов аварийной защиты, причем выходы системы измерения 2 соединены с системой управления объекта 3, с входом блока контроля соответствия признаков установленным границам допусков 7 и с входами блоков формирования признаков динамической активности первого и второго рода 5 и 6, ко входам которых подключен выход блока коррекции математической модели объекта 13, выход блока формирования признаков динамической активности первого рода 5 подключен ко входу блока контроля соответствия признаков установленным границам допусков 7 и блоков идентификации причин невязок методом последовательного разграничения альтернативных гипотез 8, 9, 10, 11, выход блока формирования признаков динамической активности второго рода 6 подключен ко входу второго блока идентификации причин невязок методом разграничения второй пары альтернативных гипотез 9 и ко входу блока контроля соответствия признаков установленным границам допусков 7, выход которого подключен к входу первого блока идентификации причин невязок методом разграничения первой пары альтернативных гипотез 8, один из выходов которого подключен к входу второго блока идентификации причин невязок методом разграничения второй пары альтернативных гипотез 9, а другой к входу блока коррекции математической модели 13, один из выходов второго блока идентификации причин невязок 9 методом последовательного разграничения альтернативных гипотез подключен к входу третьего блока идентификации причин невязок 10 методом последовательного разграничения альтернативных гипотез, а другой к входу блока коррекции математической модели 13, а третий к входу первого блока формирования сигналов управления объектом по парированию его динамической активности или переводу на щадящий режим работы 14, один из выходов третьего блока идентификации причин невязок 10 методом последовательного разграничения альтернативных гипотез подключен к входу четвертого блока идентификации причин невязок методом разграничения четвертой пары альтернативных гипотез 11, другой к входу блока коррекции математической модели 13, выходы четвертого блока идентификации причин невязок методом последовательного разграничения альтернативных гипотез 11 подключены к входу блока коррекции математической модели 13, к входу блока идентификации неисправностей параметрического типа 15 и к входу блока идентификации неисправностей структурного типа 17, при этом выход блока идентификации неисправностей параметрического типа 15 подключен к входу второго блока формирования сигналов управления объектом по его переводу на щадящий режим или аварийной защите 16, а выходы блока идентификации неисправностей структурного типа 17 подключены к входам блока коррекции математической модели 13 и третьего блока формирования сигналов управления объектом по его аварийной защите 18, причем к входу системы автоматического управления 3 подключены выход первого блока формирования сигналов управления объектом по парированию его динамической активности или переводу на щадящий режим работы 14, выход второго блока формирования сигналов управления объектом по переводу его на щадящий режим или аварийной защите 16 и выход третьего блока формирования сигналов управления объектом по его аварийной защите 18, а четвертый блок идентификации причин невязок методом разграничения альтернативных гипотез 11 и блок коррекции математической модели 13 имеют каналы обмена информацией с блоком базы данных 12 объекта управления.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АГРЕГАТОМ | 2001 |
|
RU2213889C2 |
| СПОСОБ МНОГОКАНАЛЬНОГО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ГРУППОЙ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 2001 |
|
RU2224278C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2132079C1 |
| US 5513095 А, 30.04.1996 | |||
| DE 4236856, 05.05.1994. | |||

