Изобретение относится к приборостроению, а именно к измерительной технике, и может быть использовано в системах автоматического управления, где требуется бесконтактное измерение угла поворота вращающегося объекта, например вала.
Известны устройства, относящиеся к измерительной технике, например бесконтактный программируемый датчик абсолютного углового положения в 360° (патент РФ №2312363 от 10.12.2007 г., МКИ G01P 3/488).
Бесконтактный датчик углового положения ротора содержит постоянный цилиндрический магнит и датчик Холла, детектирующий компоненты магнитного поля и выдающий сигнал об угле поворота магнита. Цилиндрический магнит закреплен на роторе так, что его ось совпадает с осью вращения ротора. Датчик Холла расположен на неподвижном статоре так, что центр датчика Холла находится на оси вращения ротора.
Недостатком данного датчика является жесткое конструктивное ограничение на расположение датчика Холла относительно магнита, что снижает область применения датчика. Датчик не позволяет измерять угол поворота объекта с полой осью вращения, например, когда необходимо через ось проложить проводники или передать лазерное излучение.
Известен датчик положения дроссельной заслонки (патент РФ №2313711 от 27.12.2007 г., МКИ F16K 3/00).
Бесконтактный датчик угла поворота втулки дроссельной заслонки содержит кольцевой магнит и датчик Холла, по величине выходного сигнала которого определяют угол поворота втулки. Кольцевой магнит закреплен на вращающейся втулке так, что его ось совмещена с осью ее вращения, причем датчик Холла смещен относительно оси вращения втулки, а плоскость чувствительности датчика Холла перпендикулярна плоскости, проходящей через торцевую поверхность кольцевого магнита.
Недостатком данного устройства является высокая нелинейность выходного сигнала и ограниченный диапазон измерения углов поворота 0°…121°.
Наиболее близким аналогом заявляемого устройства является датчик углового положения с дипольным кольцевым магнитом, магнитное поле которого при вращении параллельно поверхности магнитоуправляемой интегральной схемы, так называемого датчика Холла (см. С.Сысуева. Рекомендации производителям автомобильных цифровых датчиков скорости и положения. Часть 2. Новые рекомендации по разработке датчиков с магнитным ротором. Журнал «Компоненты и технологии», №2, 2007, стр.23-28, рис.14, б).
Датчик углового положения содержит кольцевой дипольный магнит с диаметральной намагниченностью, ось которого совмещена с осью вращения объекта, например вала, и датчик Холла, детектирующий компоненты магнитного поля и выдающий сигнал об угле поворота кольцевого магнита. Причем датчик Холла смещен относительно оси вращения кольцевого магнита, а плоскость чувствительности датчика Холла параллельна плоскости, проходящей через торцевую поверхность кольцевого магнита.
Недостатком данного датчика являются высокая нелинейность выходного сигнала и изменение чувствительности более чем в 10 раз в диапазоне углов поворота 0°…360°, а также низкая чувствительность в диапазонах углов поворота 60°…160° и 220°…320°.
Целью предлагаемого технического решения является повышение линейности и выравнивание чувствительности датчика в угловом диапазоне 0°…360° при увеличении чувствительности в диапазонах углов поворота 60°…160° и 220°…320°.
Поставленная цель достигается тем, что в бесконтактном датчике углового положения, содержащем дипольный кольцевой магнит с диаметральной намагниченностью, ось которого совмещена с осью вращения объекта, и датчик Холла, смещенный относительно оси вращения кольцевого магнита, угол между плоскостью чувствительности датчика Холла и плоскостью, проходящей через торцевую поверхность кольцевого магнита, составляет 40°±10°, а расстояния от центра датчика Холла до оси вращения и до плоскости, проходящей через торцевую поверхность кольцевого магнита, составляют соответственно 0,9±0,3 и 1±0,25 внешнего радиуса кольцевого магнита.
Заявленное техническое решение поясняется графическими изображениями:
на фиг.1 показан бесконтактный датчик углового положения;
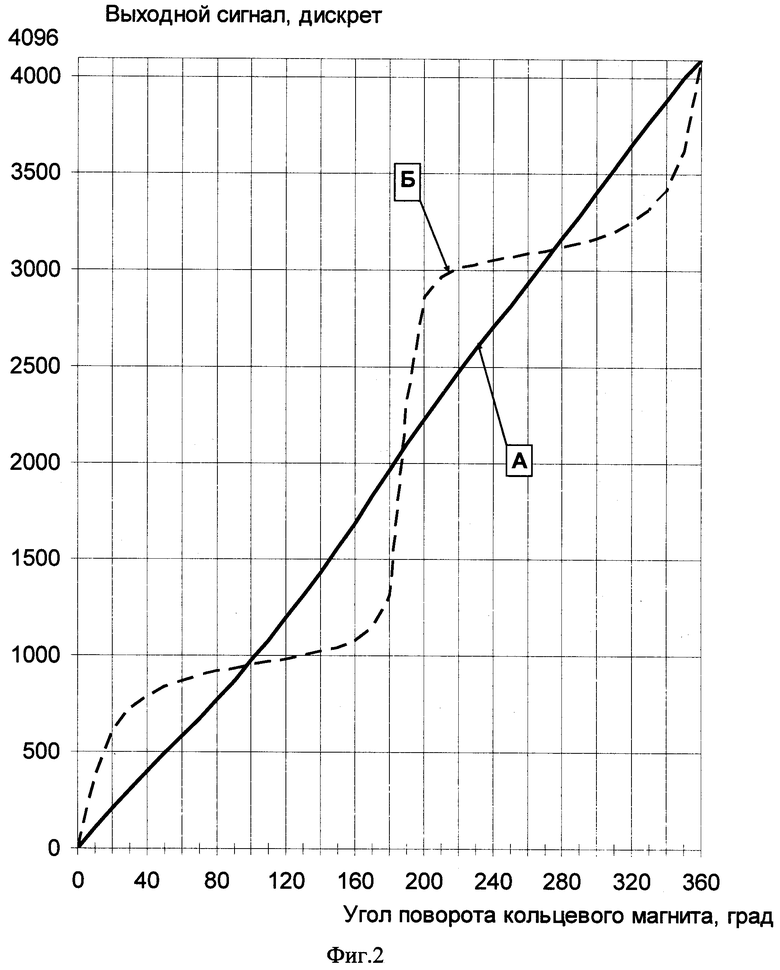
на фиг.2 приведены графики зависимостей выходного 12-битного цифрового сигнала с датчика Холла от угла поворота кольцевого дипольного диаметрально намагниченного магнита.
Заявляемый бесконтактный датчик углового положения состоит из кольцевого магнита 1 с центральным отверстием 2, который расположен на вращающемся объекте 3, и датчика Холла 4, причем ось кольцевого магнита 1 совмещена с осью вращения объекта 5.
Бесконтактный датчик углового положения работает следующим образом: датчик Холла 4 детектирует компоненты магнитного поля, создаваемого кольцевым магнитом 1, и выдает сигнал об угле его поворота.
Выравнивание чувствительности датчика (с точностью 5…7%) в диапазоне углов поворота кольцевого магнита 0°…360° обеспечивается при соблюдении следующих зависимостей:
Роси=0,9R±0,3R,
Ркм=1R±0,25R,
α=40°±10°,
где R - внешний радиус кольцевого магнита;
Роси - расстояние от центра датчика Холла до оси вращения объекта;
Ркм - расстояние от центра датчика Холла до плоскости Т, проходящей через торцевую поверхность кольцевого магнита;
α - угол между плоскостью чувствительности Н датчика Холла и плоскостью Т, проходящей через торцевую поверхность кольцевого магнита.
При Роси меньше 0,6R и Роси больше 1,2R отмечается изменение чувствительности датчика. Например, при Роси=0 мм чувствительность изменяется на 12%, при Роси=1,5R чувствительность изменяется на 20%.
При Ркм меньше 0,75R и Ркм больше 1,25R отмечается изменение чувствительности датчика. Например, при Ркм=0,5R чувствительность изменяется на 15%, при Ркм=1,5R чувствительность изменяется на 12%.
При α меньше 30° и α больше 50° отмечается изменение чувствительности датчика. Например, при α=0° чувствительность изменяется на 20%, при α=90° чувствительность изменяется на 15%.
В качестве датчика Холла 4 используется любая микросхема с функцией магнитного датчика угла. Кольцевой магнит 1 может иметь различные геометрические параметры.
Наилучшей реализацией является бесконтактный датчик углового положения, при котором угол α между плоскостью чувствительности Н датчика и плоскостью Т, проходящей через торцевую поверхность кольцевого магнита, составляет 40°, а расстояния от центра датчика Холла до оси вращения и до плоскости Т, проходящей через торцевую поверхность кольцевого магнита, составляют соответственно 18 мм и 20 мм.
Использован дипольный диаметрально намагниченный кольцевой магнит из материала NdFeB с величиной остаточной индукции, равной 1,2 Тл, с размерами ⌀40 мм × ⌀15 мм × 3 мм и датчик Холла AS5046 с выходным 12-битным цифровым сигналом.
На фиг.2 представлены графики зависимости выходного сигнала от угла поворота кольцевого магнита одного из вариантов (α=40°, Ркм=18 мм, Роси=0 мм) реализации заявленного датчика (А) и датчика-прототипа (Б). Для данного варианта вращающийся объект был выполнен из диэлектрического материала.
Зависимость выходного сигнала (Б) датчика-прототипа от угла поворота кольцевого магнита в диапазоне 0°…360° характеризуется изменением чувствительности от 2 до 30 дискрет/град, т.е. примерно в 15 раз. Причем в угловых диапазонах, лежащих между указанными диапазонами, чувствительность датчика имеет нелинейный характер. Минимальная величина чувствительности наблюдается в диапазонах углов поворота 60°-160° и 220°-320° и составляет 2 дискрет/градус. По сравнению с прототипом заявленное устройство обеспечивает постоянную чувствительность, равную 11 дискрет/град (с точностью 5…7%), в диапазоне углов поворота 0…360°.
Следовательно, обеспечивается постоянная чувствительность датчика во всем угловом диапазоне по сравнению с изменяющейся в 15 раз чувствительностью датчика-прототипа, причем в суммарном угловом диапазоне 200° чувствительность предлагаемого датчика повышена (с 2 до 11 дискрет/градус) в 5,5 раз.
Благодаря использованию простых конструктивных решений, применению в датчике кольцевого магнита с центральным отверстием, диапазону геометрических параметров расположения датчика Холла относительно оси вращения и торцевой поверхности кольцевого магнита заявляемое устройство обладает широкими функциональными, конструктивными и технологическими возможностями, что определяет промышленную полезность нового технического решения.
Простота конструкции основных элементов заявляемого устройства обеспечивает низкую себестоимость датчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ПРОГРАММИРУЕМЫЙ ДАТЧИК АБСОЛЮТНОГО УГЛОВОГО ПОЛОЖЕНИЯ В 360° | 2006 |
|
RU2312363C1 |
| Бесконтактный истинно двухосевой датчик угла поворота вала | 2014 |
|
RU2615612C2 |
| ПРОГРАММИРУЕМЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360° | 2006 |
|
RU2317522C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360 ГРАДУСОВ | 2005 |
|
RU2313763C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ПЕДАЛИ | 2005 |
|
RU2301399C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКИ | 2005 |
|
RU2298148C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2005 |
|
RU2378613C2 |
| СИНХРОННЫЙ САМОЗАПУСКАЮЩИЙСЯ ЭЛЕКТРОДВИГАТЕЛЬ | 2007 |
|
RU2342764C1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ И ЧАСТОТЫ ВРАЩЕНИЯ РАСПРЕДЕЛИТЕЛЬНОГО ВАЛА ДЛЯ СИСТЕМЫ ЗАЖИГАНИЯ | 2007 |
|
RU2364746C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УСТАНОВОЧНОГО УГЛА ЭЛЕМЕНТА, СПОСОБНОГО ВРАЩАТЬСЯ ВОКРУГ ОСИ | 2008 |
|
RU2494347C2 |
Использование: изобретение относится к приборостроению, а именно к измерительной технике, и может быть использовано в системах автоматического управления, где требуется бесконтактное измерение угла поворота вращающегося объекта. Сущность: бесконтактный датчик углового положения содержит дипольный кольцевой магнит с диаметральной намагниченностью, ось которого совмещена с осью вращения объекта, и датчик Холла, смещенный относительно оси вращения кольцевого магнита, при этом угол между плоскостью чувствительности датчика Холла и плоскостью, проходящей через торцевую поверхность кольцевого магнита, составляет 40°±10°, а расстояния от центра датчика Холла до оси вращения и до плоскости, проходящей через торцевую поверхность кольцевого магнита, составляют соответственно 0,9±0,3 и 1±0,25 внешнего радиуса кольцевого магнита. Технический результат: повышение линейности и выравнивание чувствительности датчика в угловом диапазоне от 0° до 360° при увеличении чувствительности в диапазонах углов поворота 60°-160° и 220°-320°. 2 ил.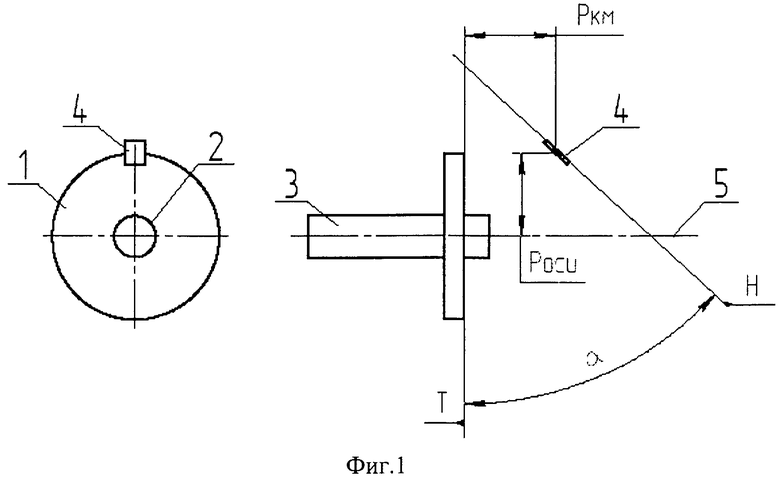
Бесконтактный датчик углового положения, содержащий дипольный кольцевой магнит с диаметральной намагниченностью, ось которого совмещена с осью вращения объекта, и датчик Холла, смещенный относительно оси вращения кольцевого магнита, отличающийся тем, что угол между плоскостью чувствительности датчика Холла и плоскостью, проходящей через торцевую поверхность кольцевого магнита, составляет 40°±10°, а расстояния от центра датчика Холла до оси вращения и до плоскости, проходящей через торцевую поверхность кольцевого магнита, составляют соответственно 0,9±0,3 и 1±0,25 внешнего радиуса кольцевого магнита.
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ И ЧАСТОТЫ ВРАЩЕНИЯ РАСПРЕДЕЛИТЕЛЬНОГО ВАЛА ДЛЯ СИСТЕМЫ ЗАЖИГАНИЯ | 2007 |
|
RU2364746C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК СКОРОСТИ АВТОМОБИЛЯ | 2004 |
|
RU2270452C2 |
| Иванов Евгений | |||
| Бесконтактный датчик угла поворота на эффекте Холла | |||
| Новости электроники, №15, 2006 | |||
| DE 19832111 А1, 04.02.1999 | |||
| US 5126663 А, 30.06.1992 | |||
| CN 101097225 А, 02.01.2008. | |||

