Изобретение относится к автомобильному электронному приборостроению и может быть непосредственно использовано в электронных системах управления автомобилем для определения угла открытия дроссельной заслонки, степени нажатия педали акселератора, положения клапана рециркуляции отработавших газов, в других автомобильных системах, требующих получения аналогового или ШИМ-сигнала об абсолютном угловом положении вращающегося объекта (вала), а также для бесконтактного детектирования абсолютного углового положения большого числа вращающихся объектов во многих других отраслях легкой и тяжелой промышленности.
Аналогом заявляемого датчика является датчик положения педали акселератора (United States Patent 4915075 от 10 апреля 1990 года).
Устройство описывает установленные в педаль потенциометр и плату со схемой формирования ШИМ-сигнала, с выходным рабочим циклом, пропорциональным положению педали.
К недостаткам данного устройства относятся подверженность износу, характерная для потенциометров, малый срок службы, невысокая надежность, чувствительность к вибрации и пыли.
Аналогом заявляемого устройства является датчик углового положения с устройством Холла и постоянным магнитом заданной формы (United States Patents 5159268 от 27 октября 1992 года).
Устройство описывает два предпочтительных варианта формы магнита - продолговатой и колоколообразной формы, позволяющие добиться высокой линейности при его вращении.
Недостатком данного устройства является сложность магнитной системы, необходимость использования магнитов специальной формы и применения расчетных математических методов.
Аналогом заявляемого устройства является магнитный датчик углового положения с улучшенной выходной линейностью (United States Patents 5444369 от 22 августа 1995 года).
Устройство использует массивные стационарные аксиальные магнитопроводы и вращающийся магнитопровод, к которому прикреплены один или более магнитов.
К недостаткам данного устройства относятся громоздкость, конструктивная сложность, применение как расчетных методов, так и настройки и регулировки устройства, отсутствие адаптированности к специальным требованиям, предъявляемым к механике автомобильных датчиков, работающих в ограниченном диапазоне угла поворота.
Аналогом заявляемого устройства является датчик положения педали с магнитом, движущимся относительно датчика магнитного поля, локализованного в статорном канале (United States Patents 6577119 от 10 июня 2003 года).
Устройство описывает бесконтактный датчик положения, в котором статор имеет поверхность, включающую две области магнитного материала, магнит механически связан с ножной педалью акселератора, относительное движение которой вдоль одного или двух датчиков Холла в статорном канале вызывает образование электрического сигнала, пропорционального перемещению магнита, и обрабатывается в интегрированных схемах датчиков одной или двумя внешними ASIC (Application Specific Integrated Circuit) с возможностями программирования, например в EEPROM, линейной выходной характеристики и температурной компенсации, а также формирования сигнала для передачи по последовательному протоколу, например по шине CAN.
Недостатком данного устройства является сложность описываемой магнитной системы, необходимость применения двух датчиков Холла для повышения точности измерений, одной или двух внешних интерфейсных ASIC для реализации необходимого интерфейса.
Прототипом заявляемого датчика является измерительное устройство для бесконтактного определения угла вращения (United States Patent 6534971 от 18 марта 2003 г.).
Данное устройство включает ротор, на котором расположен постоянный магнит, имеющий диаметральное направление намагниченности, и элемент Холла, расположенный асимметрично и описывающий эллиптическое вращательное движение постоянного магнита. При этом никакие концентраторы магнитного потока в данной конструкции не используются. Указанная магнитная система позволяет получить область выходной характеристики с крутой областью снижения и характерными плоскими областями.
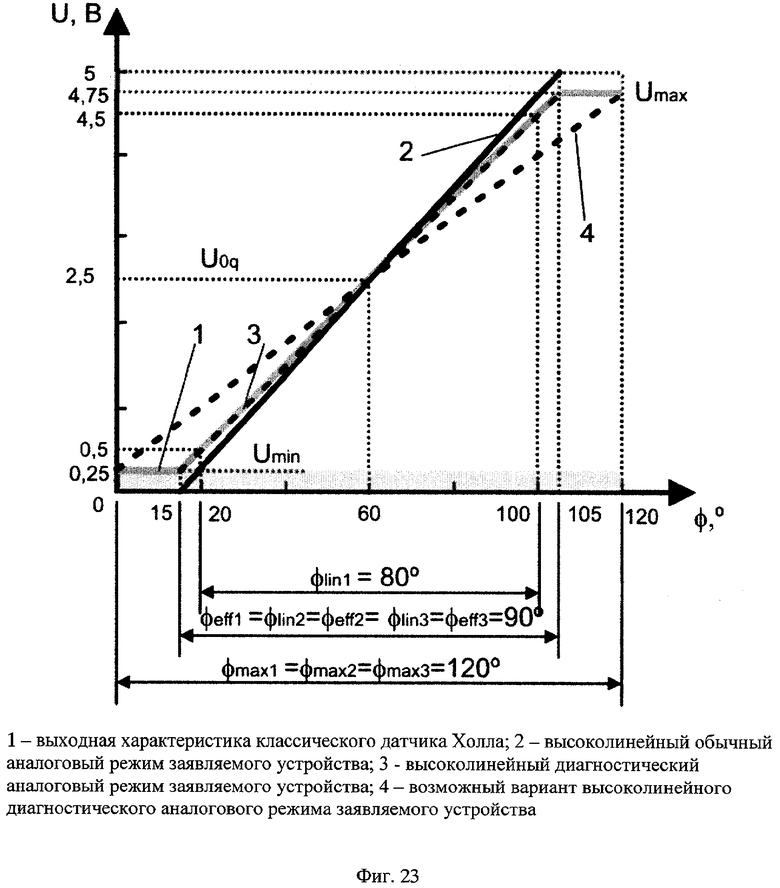
Недостатком данного устройства является сужение диапазона измеряемого угла вследствие недостаточной однородности выходной характеристики (в описании изобретения указывается угловая область линейности до 80°, тогда как во многих случаях для эффективной работы датчика требуется измерять углы до 100...120° и более, до 360° или, для некоторых типов устройств, даже углы в несколько полных оборотов), присутствие плоского участка кривой, недостаточная линейность характеристики в полном рабочем диапазоне.
В устройстве отсутствуют специальные схемотехнические и механические средства адаптации к конкретным условиям работы датчика.
Обычные линейные датчики Холла, используемые в конструкции прототипа, имеют достаточно много недостатков: низкая чувствительность, дрейфы чувствительности, смещения и значительная нелинейность.
Задачи изобретения - повышение точности и повторяемости измерений, увеличение чувствительности, расширение функционального диапазона и линейного участка измеряемого угла до 360°, улучшение абсолютных и относительных показателей линейности сигнала абсолютного положения (линейности аналогового сигнала или дрейфа скважности ШИМ-сигнала), повышение надежности, развитие адаптационных признаков к конкретным условиям работы, в том числе - прямое замещение аналоговых трехпроводных и двухпроводных (ШИМ) потенциометров, упрощение конструкции устройства и технологии его сборки и монтажа.
Поставленные задачи решаются тем, что в бесконтактном датчике углового положения, включающем ротор с магнитом, движущимся относительно статора с датчиком магнитного поля, статор представляет собой программируемую интегральную схему (ИС) двухосевого магнитного углового энкодера с ЦОС на основе функции арктангенса (обычно с применением CORDIC-алгоритма), аналоговым или ШИМ-интерфейсом и интегрированным крестообразным массивом чувствительных элементов Холла, детектирующих градиент рабочего магнитного поля, перпендикулярного лицевой поверхности ИС, запаиваемой способом поверхностного монтажа на печатной плате, ротор датчика, механически связанный с вращающимся валом детектируемого объекта, включает образующий рабочее магнитное поле диаметрально намагниченный цилиндрический постоянный магнит, легкая ось и цилиндрическое основание которого параллельны лицевой поверхности ИС, для выравнивания в процессе сборки жестко установленный во втулке с пазами под отвертку, жестко устанавливаемой по результатам выравнивания магнита в установочной втулке ротора с выполненной в ней ориентирующей лыской или ориентирующим пазом для установки на вал с заданной начальной ориентацией и имеющей возможность поворота в корпусе на угол, ограниченный на крайних положениях упорами в основании корпуса и выступами установочной втулки ротора, для механической изоляции статора от движущихся механических частей и ограничения осевых перемещений ротора, в датчике содержится внутренняя крышка - ограничитель, жестко фиксируемая в корпусе поверх ротора, угловой энкодер Холла допускает программирование после сборки датчика параметров его аналоговой или ШИМ выходной характеристики, нулевого положения, детектирование горизонтальных смещений магнита и его перемещений в вертикальной оси, выходной разъем корпуса датчика содержит только функциональные выводы, используемые в процессе эксплуатации датчика после его программирования, а технологические выводы и/или проводной шлейф вспомогательного технологического разъема, используемые только в процессе однократного программирования, удаляются с платы датчика перед окончательной установкой верхней крышки.
Для обеспечения основного вращения ротора (по часовой стрелке), возвратного движения (против часовой стрелки) в пределах измеряемого угла и для повышения надежности в устройство вводится цилиндрическая или коническая возвратная пружина кручения, противодействующая вращательному движению вала управляющего привода.
Общая схема устройства, расположенная на плате датчика, содержит схемы защиты от обратного напряжения, перенапряжения, короткого замыкания выхода, импульсных помех по цепи питания и выхода.
Бесконтактный датчик углового положения с линейным угловым диапазоном в пределах 360° показан на фиг.1-23.
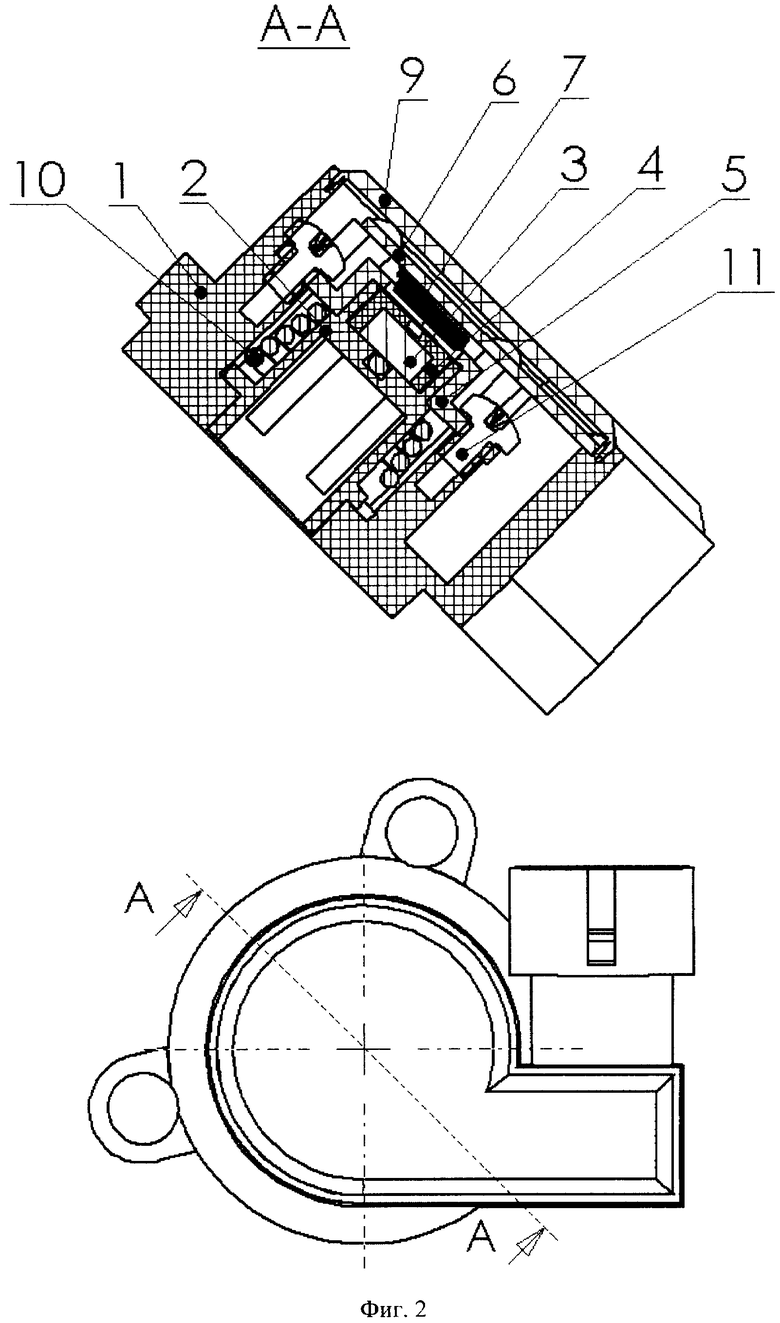
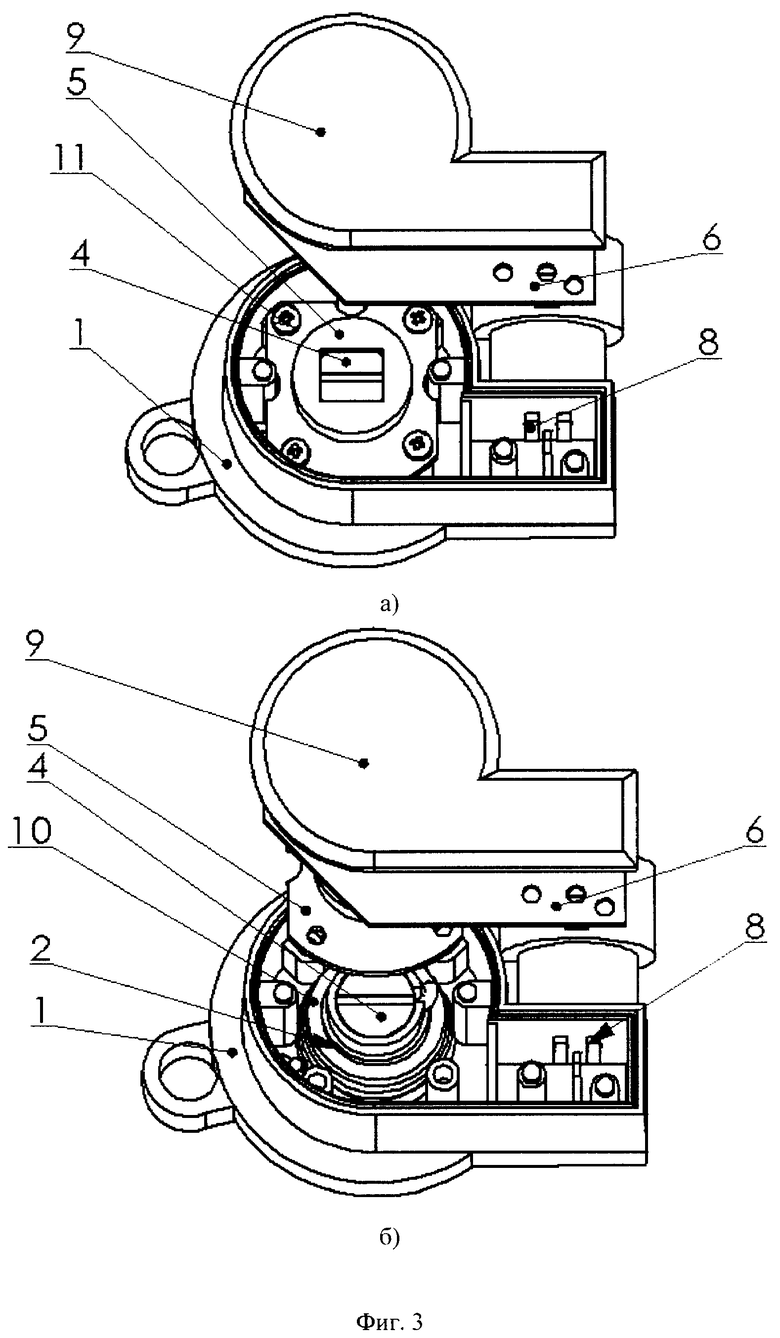
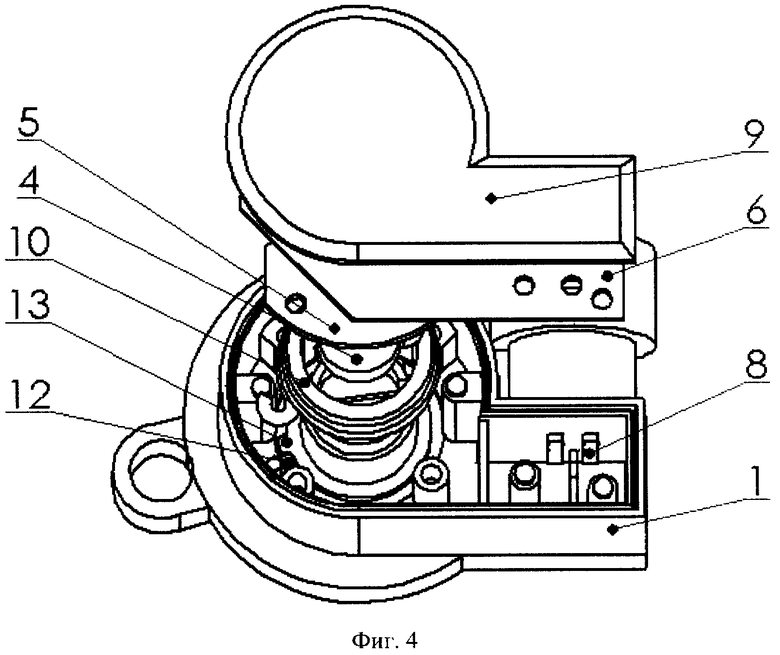
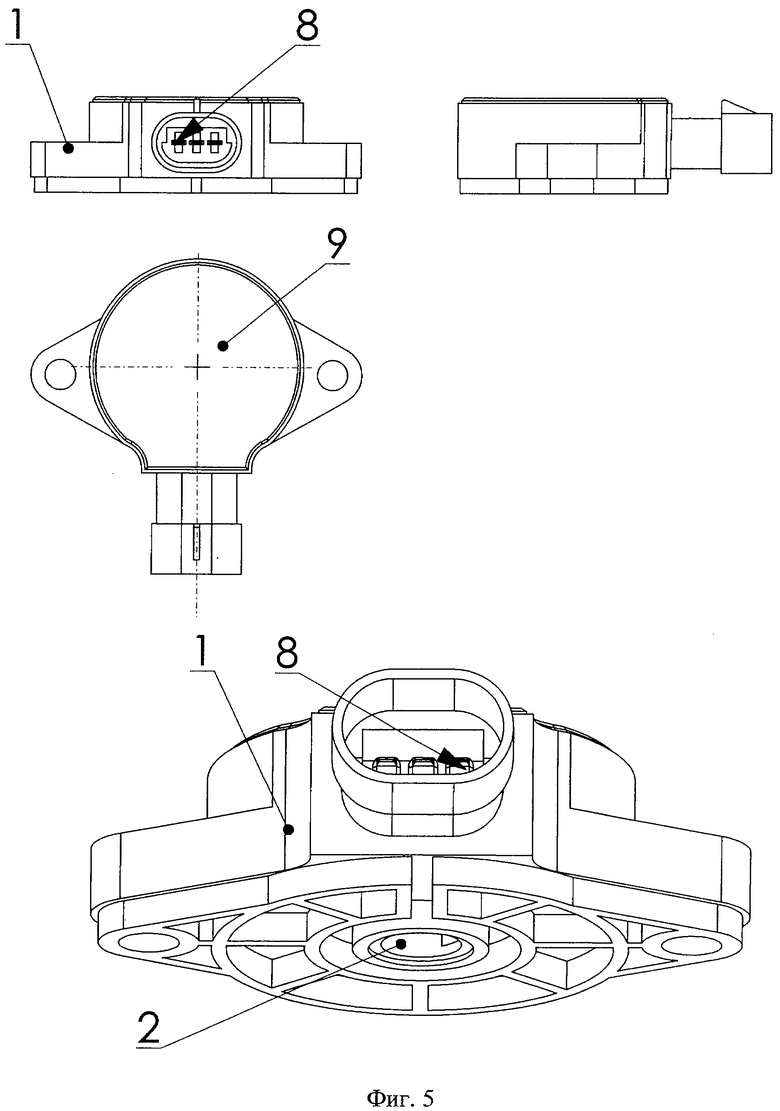
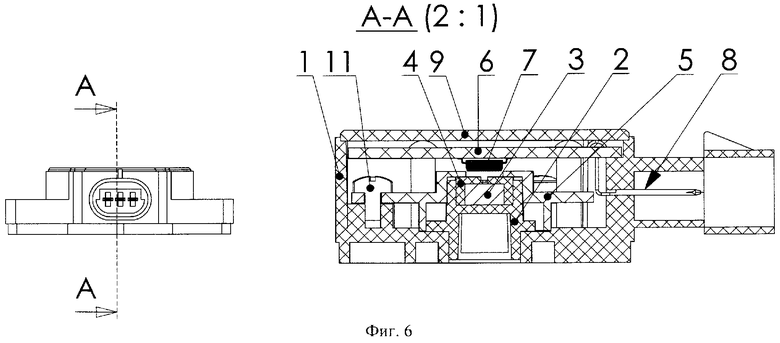
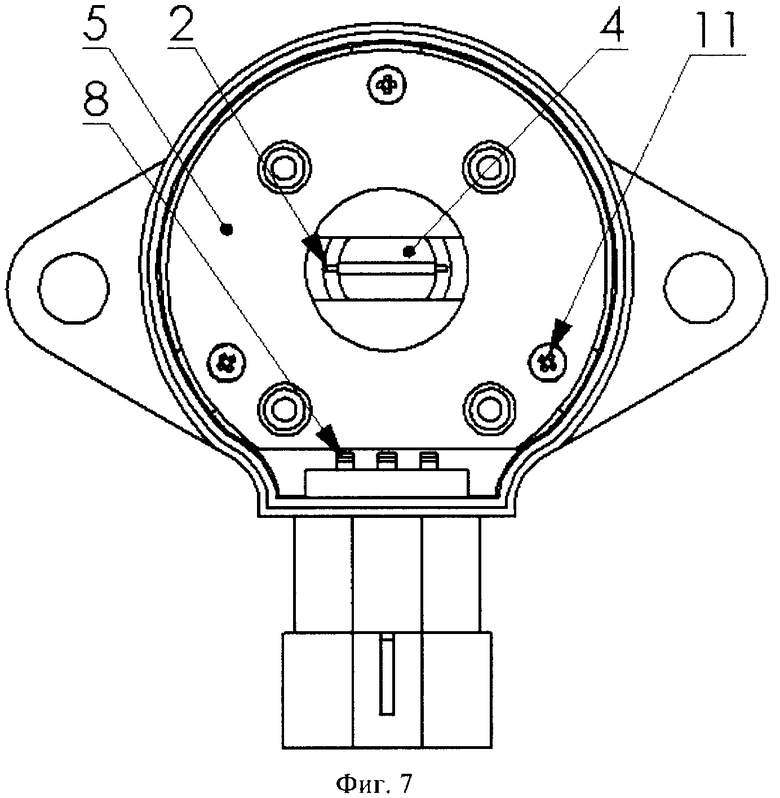
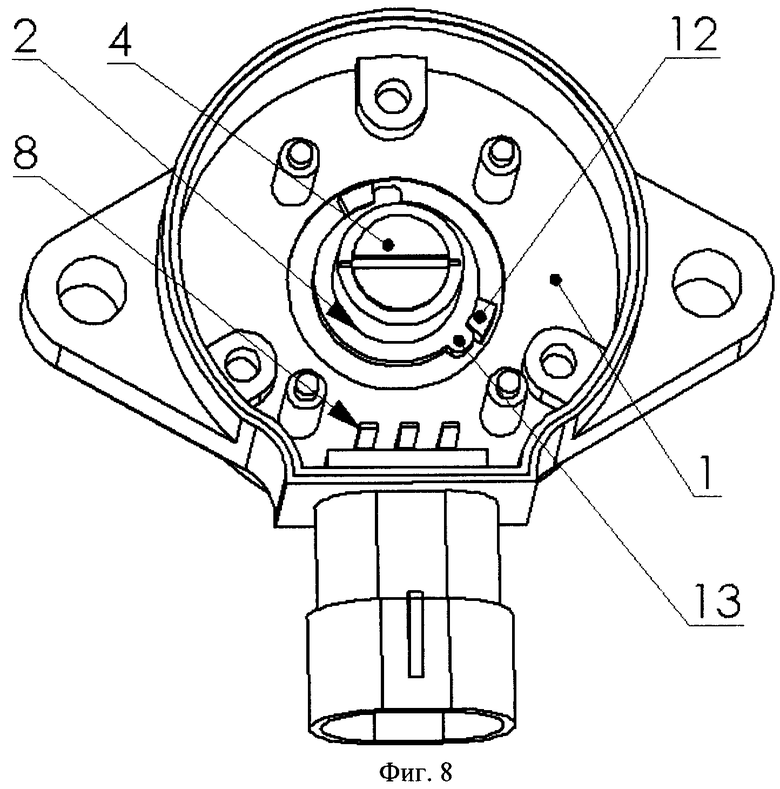
На фиг.1-4 показана конструкция аналогового бесконтактного датчика положения дроссельной заслонки, на фиг.5-8 показана конструкция аналогового бесконтактного датчика положения педали акселератора. На фиг.1 и 5 показаны проекционные виды и общий аксонометрический вид устройств, на фиг.2 и 6 показаны виды датчиков в разрезе, иллюстрирующие их принципы действия, на фиг.3 и 7 показаны виды устройств с ограничителем осевых перемещений без верхней крышки, на фиг.4 и 8 показаны виды устройств с механически определяемыми границами измеряемого угла.
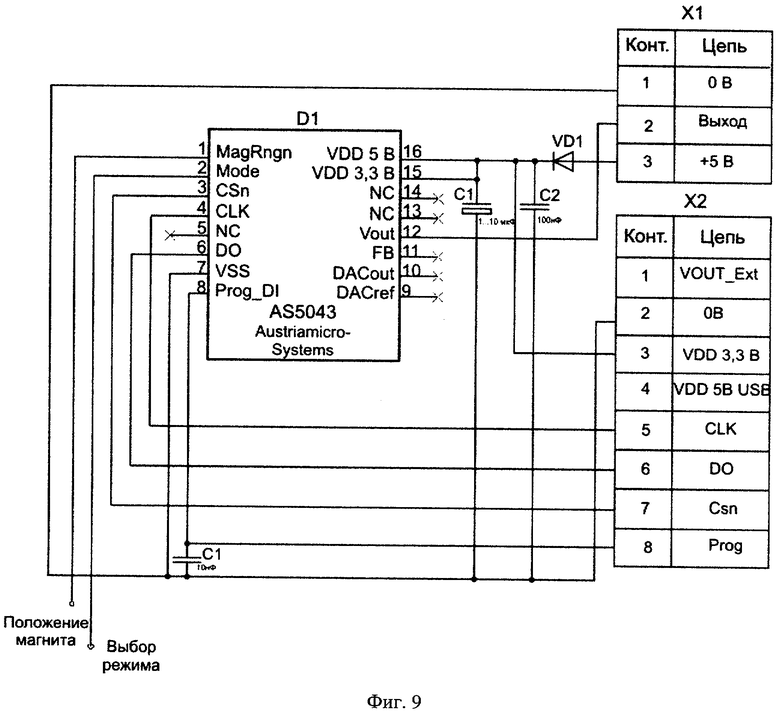
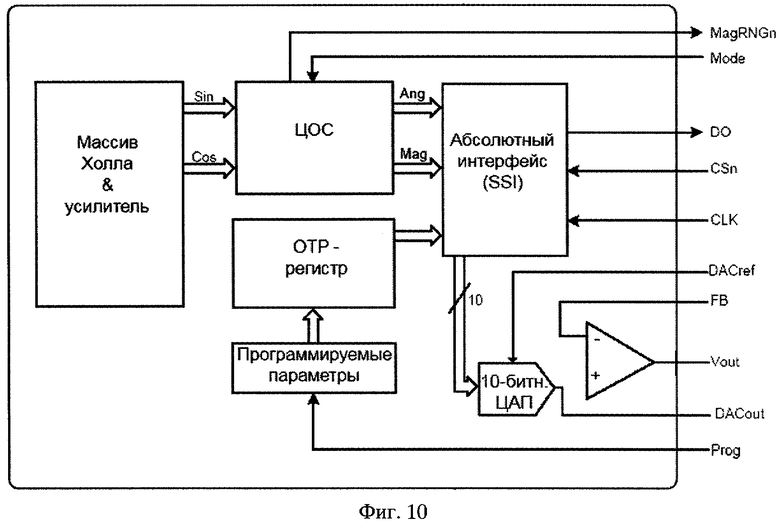
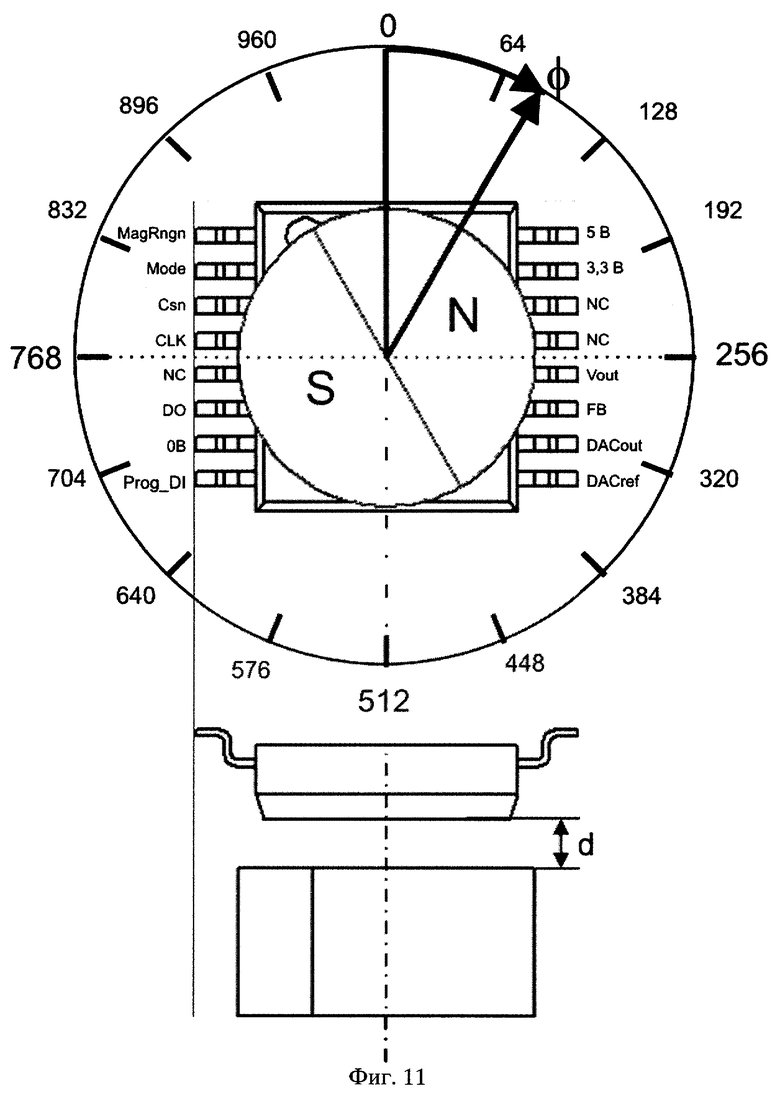
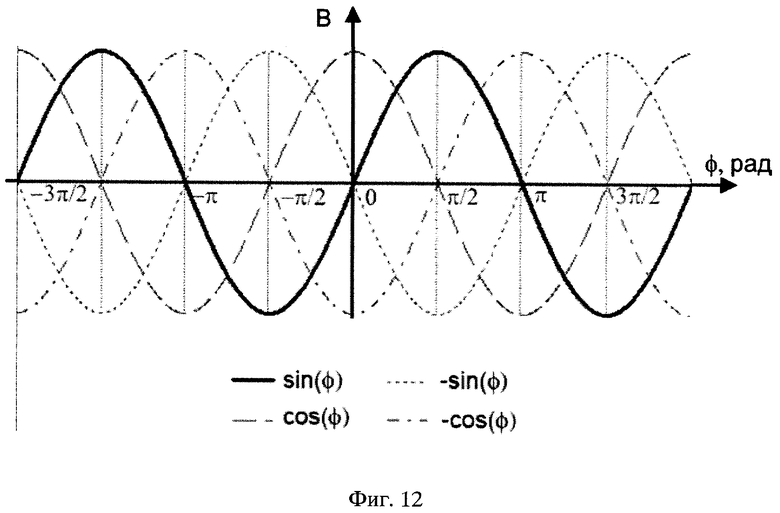
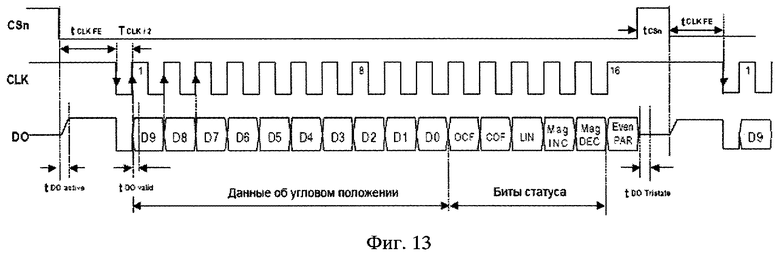
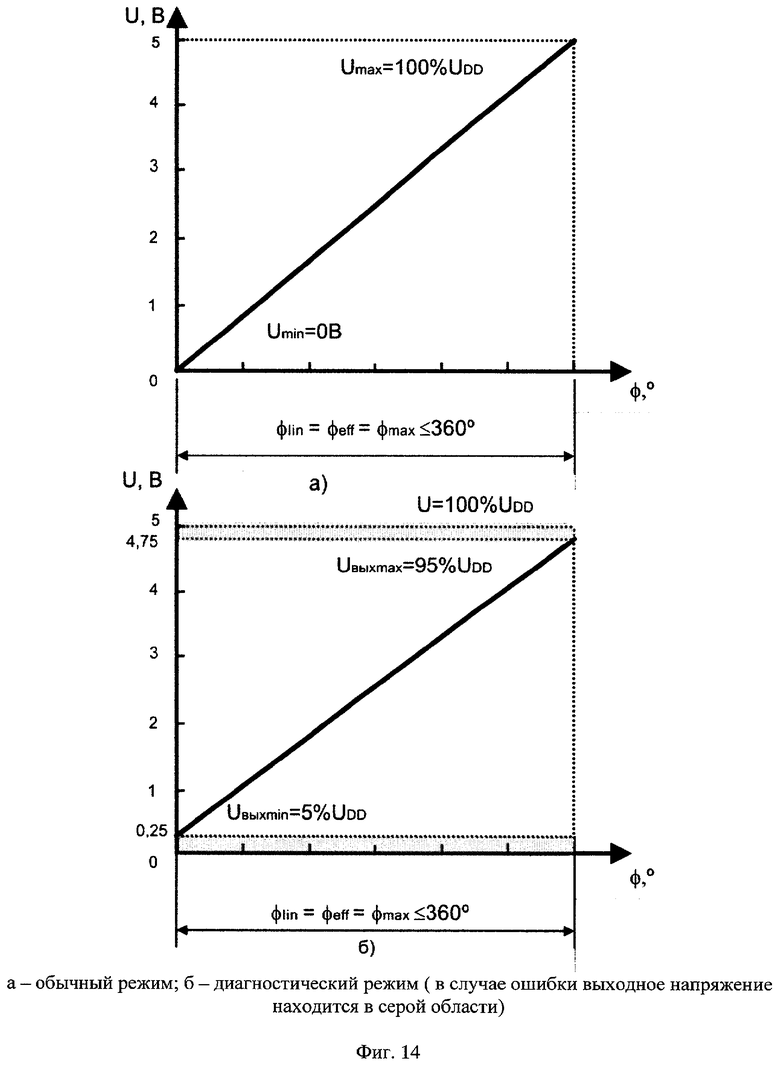
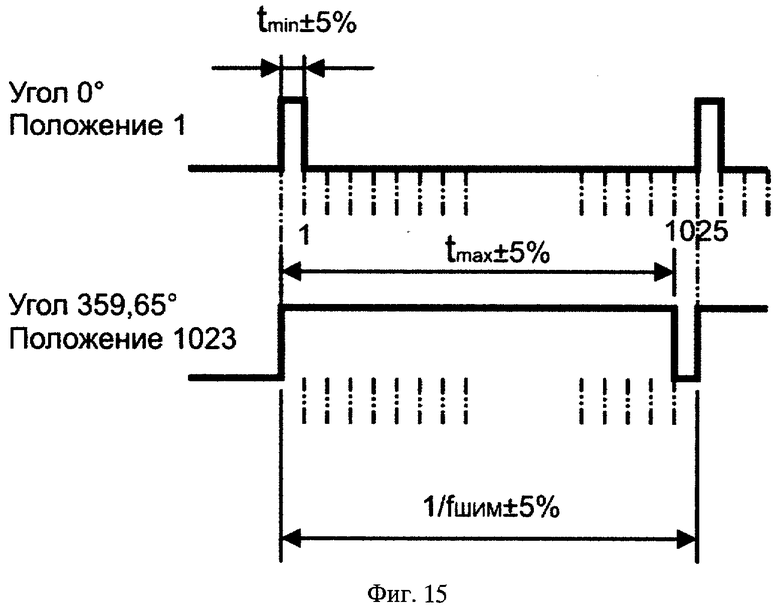
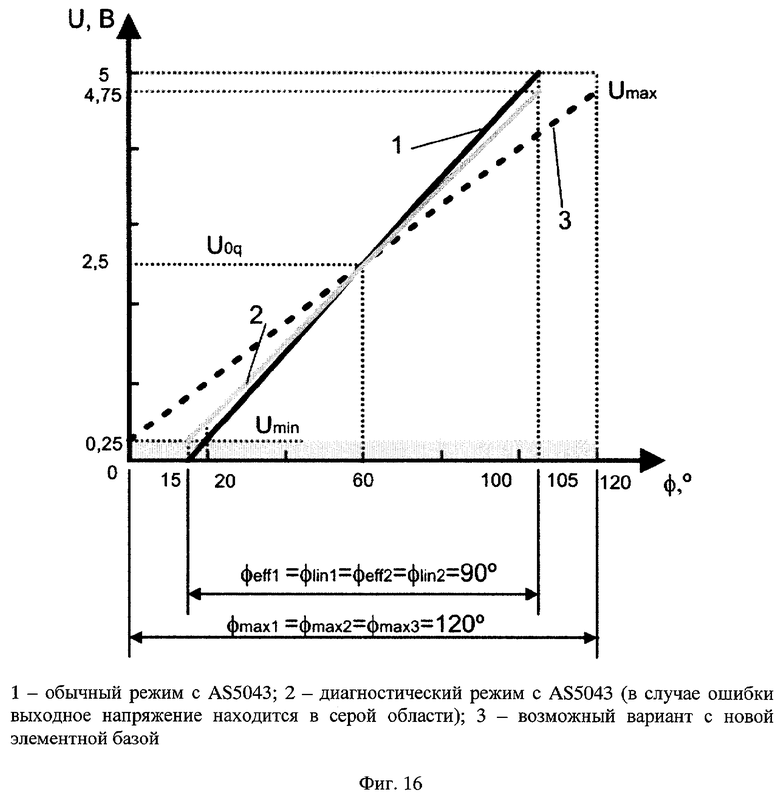
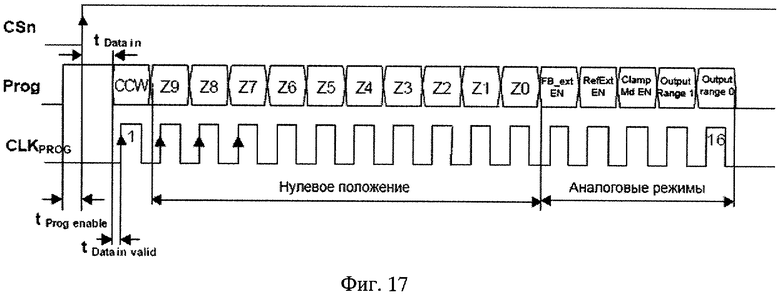
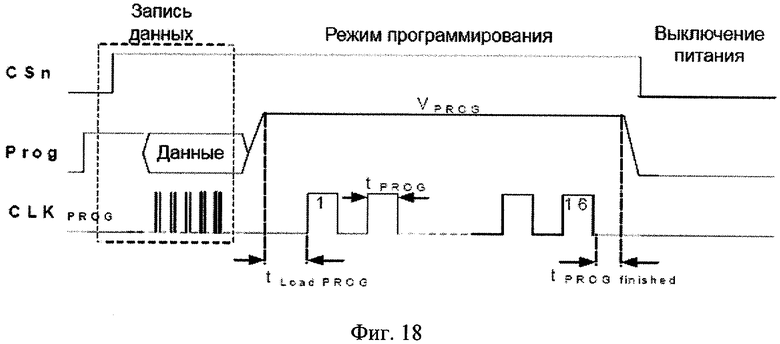
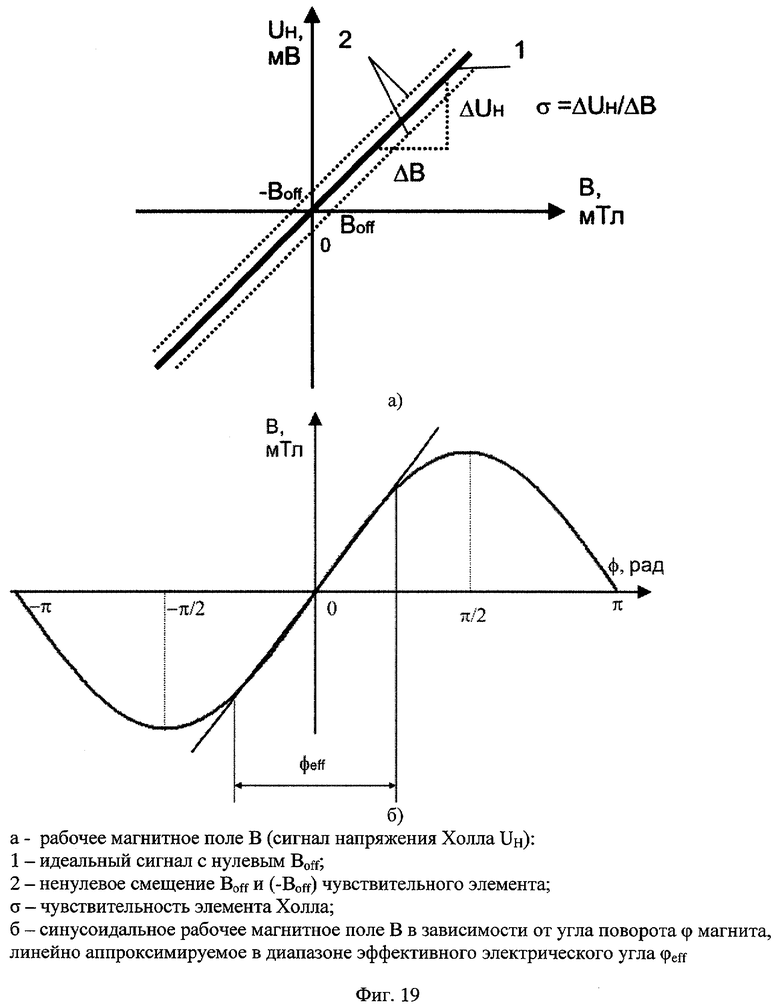
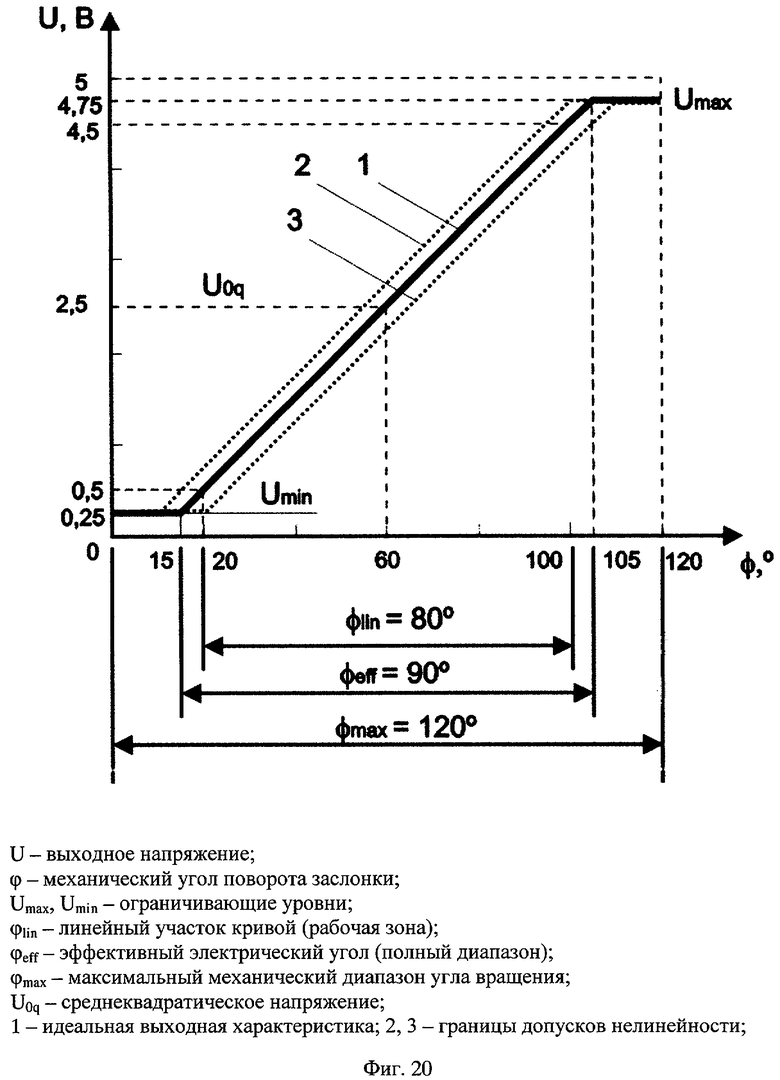
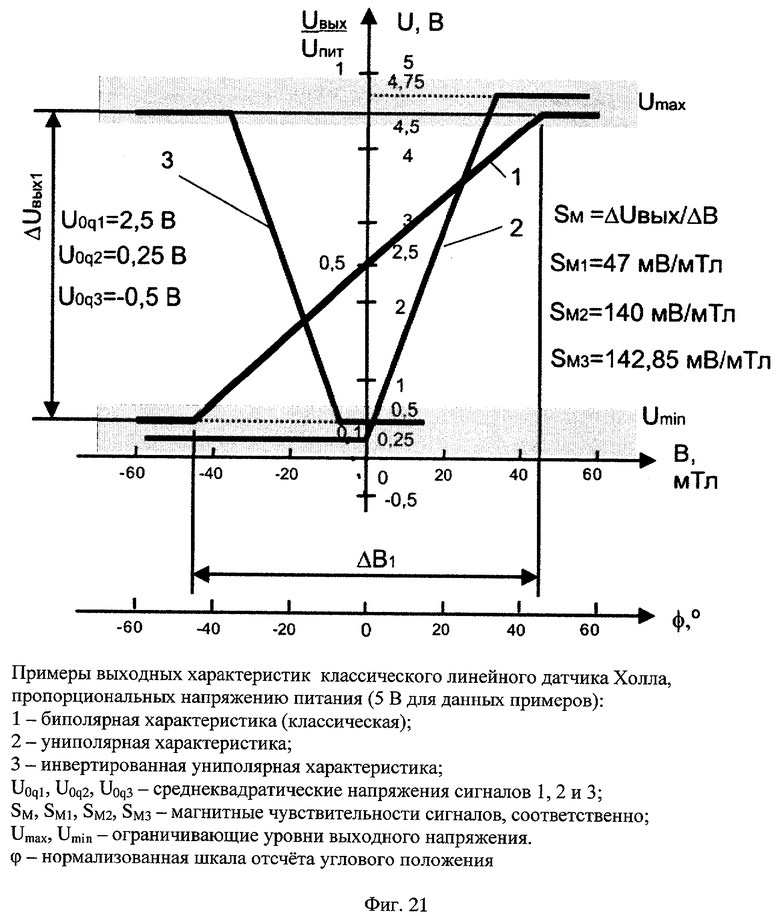
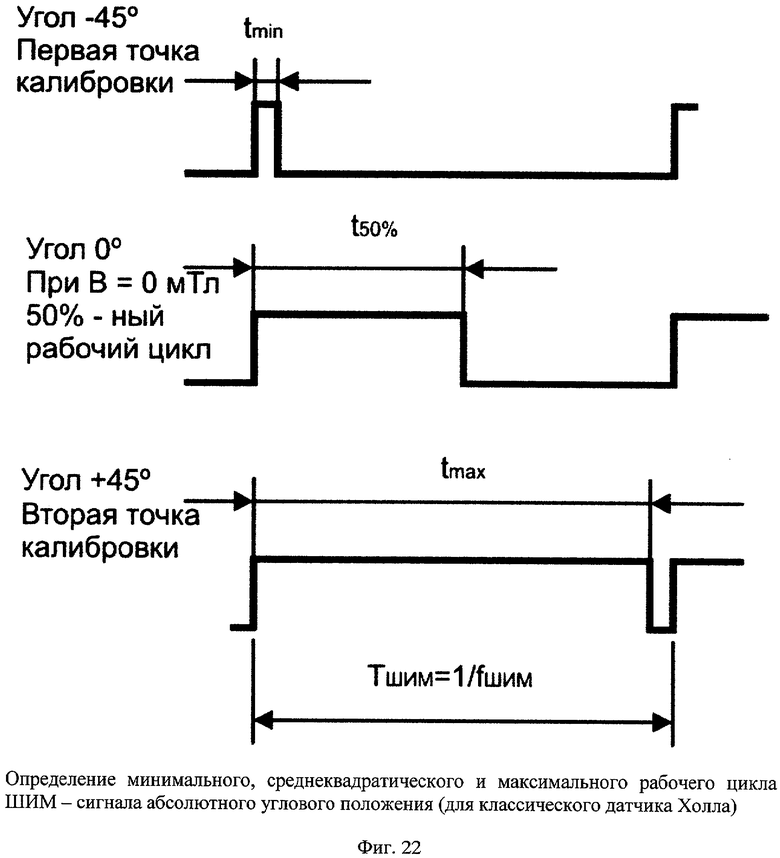
На фиг.9 приведена схема электрическая принципиальная заявляемого устройства с 10-битной ИС двухосевого магнитного углового энкодера AS5043 Austriamicrosystems, на фиг.10 приведена функциональная схема ИС AS5043 Austriamicrosystems, на фиг.11 дана иллюстрация рабочего принципа 10-битного двухосевого магнитного углового энкодера. На фиг.12 показан первичный этап формирования сигналов массива элементов Холла в ИС энкодера, на фиг.13-16 показаны выходные интерфейсы, поддерживаемые AS5043, - последовательный SSI (фиг.13) и аналоговые выходные режимы (фиг.14). ШИМ-интерфейс AS5040 (фиг.15), возможные примеры аналоговых выходных режимов заявляемого устройства (фиг.16). На фиг.17 и 18 показаны программирование датчику этап записи данных (фиг.17) и режим однократного программирования (фиг.18). На фиг.19-22 показаны первичный этап формирования передаточной характеристики (фиг.19) и типичные программируемые выходные характеристики классического датчика Холла (фиг.20-22). На фиг.23 показаны аналоговые выходные режимы заявляемого датчика в сравнении с классическими исполнениями датчиков Холла.
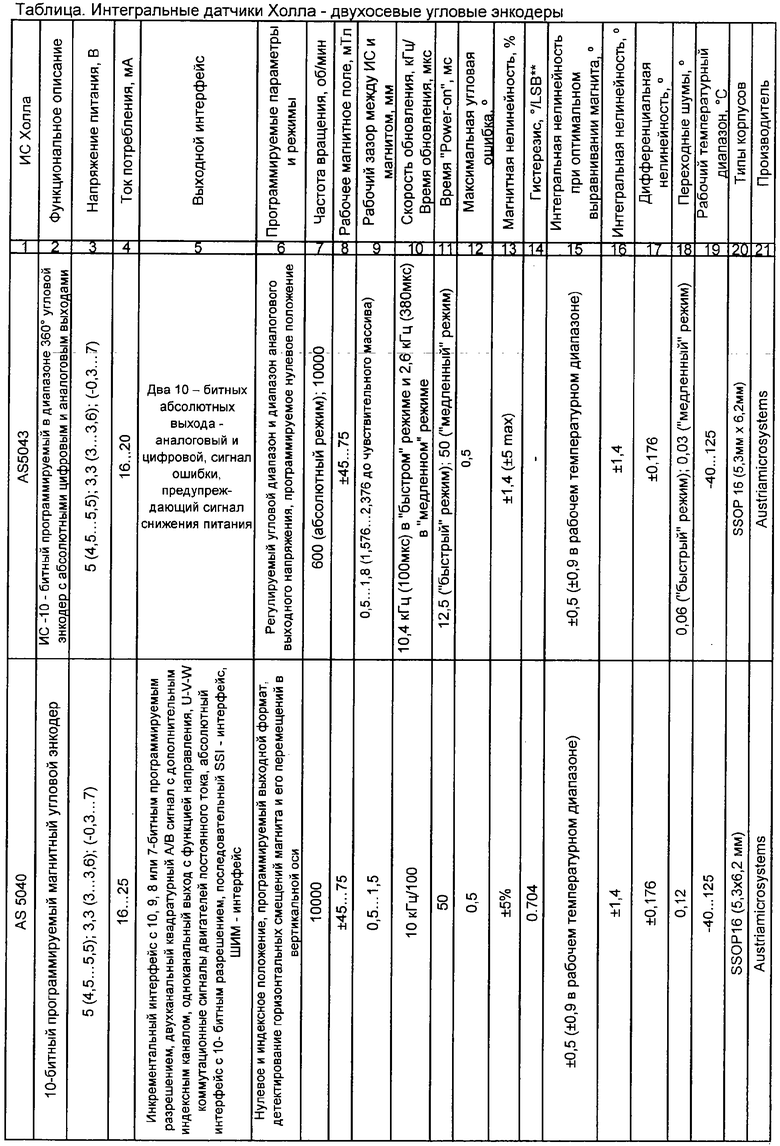
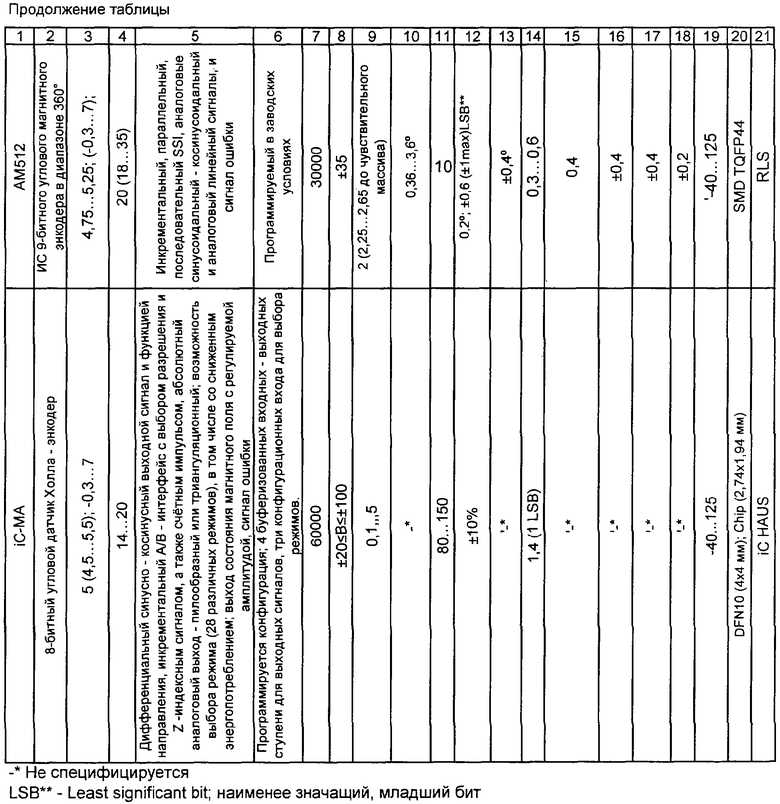
В таблице приведены технические характеристики других подходящих для описанной выше конструкции датчика известных интегральных компонентов в качестве альтернативной замены, поддерживающих аналоговый или ШИМ-интерфейс.
Конструкции датчиков углового положения, показанные на фиг.1-8, во многом сходны.
Датчик положения дроссельной заслонки, показанный на фиг.1-4, реализует рабочий режим с вращением дипольного магнита в ограниченном угловом диапазоне механического угла ϕ=120° и сканирует двумерное распределение магнитного поля с образованием выходного аналогового сигнала (для совместимости с большинством существующих обрабатывающих блоков) и последовательного SSI-канала передачи данных, используемого при его однократном программировании.
Датчик положения дроссельной заслонки, показанный на фиг.1-4, состоит из неподвижного корпуса 1 статора, установочной втулки 2 ротора, включающего также диаметрально намагниченный цилиндрический постоянный магнит 3, запрессованный в пластмассовую регулировочную втулку - корпус 4, крышки 5 - ограничителя осевых биений роторного узла, закрепляемой на винтах 11, печатной платы 6, ИС двухосевого углового энкодера с интегрированным крестообразным массивом чувствительных элементов Холла 7, контактов разъема 8, крышки датчика 9 и пружины кручения 10.
Датчик положения педали акселератора, показанный на фиг.5-8, состоит из неподвижного корпуса 1, вращающейся установочной втулки 2 ротора с диаметрально намагниченным постоянным магнитом 3, запрессованным в пластмассовую втулку 4, крышки 5 - ограничителя осевых биений роторного узла, закрепляемой на винтах 11, печатной платы 6, ИС двухосевого углового энкодера с интегрированным крестообразным массивом чувствительных элементов Холла 7, контактов разъема 8 и крышки 9.
Основные элементы статора датчика включают корпус 1 и интегральный компонент датчика - ИС 7 (а также все остальные элементы, не входящие в состав ротора, относятся к статору), ротор (подвижная часть датчика), выполняемый на основе деталей, жестко связанных между собой, включает установочную втулку 2, диаметрально намагниченный постоянный магнит 3, запрессованный во втулку 4.
Большинство новых модулей педали акселератора снабжается парой внешних пружин на педальном приводе модуля, на встраивание в который рассчитан датчик. Поскольку предполагается внешнее ограничение крутящего момента, в конструкции датчика, показанного на фиг.5-8, не задействована пружина кручения, которая необходима в датчике положения дроссельной заслонки, показанном на фиг.1-4 или другом аналогичном устройстве без внешнего ограничения крутящего момента.
В обеих конструкциях, датчика положения дроссельной заслонки (фиг.1-4) и датчика положения педали (фиг.5-8), установочная втулка 2 ротора механически связана с вращающимся валом детектируемого объекта (цели) и имеет возможность поворота на ограниченный угол ϕ в основании корпуса 1. С обратной стороны установочной втулки 2 ротора имеются лыска или ориентирующие пазы для установки устройства на вал с заданной начальной ориентацией. Корпус 1 жестко крепится двумя винтами к неподвижной части объекта.
Корпус 1 выполняется в сборке с контактами разъема 8 (по технологии обливки или запрессовки). ИС Холла - двухосевой магнитный угловой энкодер 7 устанавливается на плате 6 и запаивается. Плата 6 устанавливается в корпусе 1 поверх упорных штырей днища корпуса 1, верхняя часть которых оплавляется. Предпочтительная механическая ориентация датчика 7 относительно магнита 3 обеспечивается конструктивно. Контакты 8 запаиваются на плате 6.
Для механического ограничения осевых перемещений ротора в корпусе 1 вводится крышка 5 - ограничитель осевых биений ротора, фиксируемая поверх ротора в корпусе 1 винтами 11. Угол ϕ механически ограничивается упорами 12 в основании корпуса 1 статора и выступами 13 ротора.
Постоянный магнит 3 жестко устанавливается (запрессовывается и вклеивается) во втулке 4. Втулка 4 снабжается пазом под отвертку, что обеспечивает несколько полезных признаков конструкции:
1) возможность предварительной ориентации нулевой плоскости симметрия магнита 3 по пазу для отвертки непосредственно перед его жесткой установкой (по результатам измерений магнитного поля, например, тесламетром, гауссметром, калиброванной линейной ИС Холла, или с помощью специальных аппаратно-программных средств);
2) возможность выравнивания нулевого положения магнита 3 в процессе сборки;
3) увеличение рабочей зоны выравнивания с малым магнитом 3 (позволяет увеличивать паз под отвертку в крышке - ограничителе 5);
4) допускается использование меньших рабочих зазоров между магнитом 3 и ИС 7.
Начальное размещение магнита 3 в конструкциях, показанных на фиг.1-8, не является важным: за нулевое (с нулевым значением магнитной индукции ноля) может быть принято любое механическое положение магнита, информация о котором считается в ОТР-регистр с SSI-канала (фиг.13) передачи данных ИС, например семейства AS504x Austriamicrosystems. Например, в конструкциях на фиг.1-8 пулевой магнитный вектор совпадает с нулевым вектором отсчета эффективного электрического угла (принцип действия датчика показан на фиг.11-12, выходные интерфейсы - на фиг.13-16), в отличие от классических датчиков Холла перпендикулярных полей, рабочий принцип формирования передаточной характеристики которых показан на фиг.19-22. Выравнивание магнита 3 относительно ИС 7 может обеспечиваться в процессе сборки, но результатам выравнивания магнит 3 в корпусе 4 заклеивается в установочной втулке 2 ротора.
3-контактный выходной разъем датчика углового положения с AS5043 - принциниальная электрическая схема которого показана на фиг.9, предназначен для формирования аналогового канала передачи данных, показанных на фиг.14, 16. Выводы MagRngn. Mode, PROG и другие, объединенные в разъем Х2, являются технологическими и используются только в процессе программирования ИС, этапы которого показаны на фиг.17 и 18. После записи данных в ОТР-регистр, непосредственно перед установкой крышки 9 проводные выводы, технологические перемычки и (или) разъем Х2 удаляются с платы 6.
10-битный программируемый магнитный угловой энкодер AS5043 является одним их наиболее предпочтительных вариантов из существующей элементной базы двухосевых угловых энкодеров, поддерживающих аналоговый или ШИМ-интерфейс, текущее состояние которой отражено в таблице.
Функциональная схема AS5043 показана на фиг.10.
Все этапы обработки сигнала в ИС энкодеров AS5043 выполняются интегрирование, ИС-магнитный угловой энкодер Холла с интегрированным крестообразным массивом элементов Холла со специальным методом устранения смещения, известным как «spinning current», производит электрическое отображение магнитного поля, перпендикулярного поверхности ИС. На основе четырех первичных аналоговых рабочих сигналов, пропорциональных перпендикулярным компонентам магнитного поля, формируются два синусно-косинусных сигнала, являющихся функциями угла поворота вектора параллельного магнитного поля. Сигма-дельта АЦП и блок ЦОС обеспечивают высокоточный расчет углового положения магнита относительно ИС (угла поворота магнитного вектора, параллельного поверхности ИС), с применением функции арктангенса и алгоритма CORDIC (Coordinate Rotation Digital Computer), а также величин сигналов элементов Холла. CORDIC-алгоритм используется в ЦОС ИС энкодеров для вычисления величин сигналов элементов Холла и абсолютного значения угла ϕ и представляет собой именно итеративный метод для вычисления арктангенса. Затем полученное цифровое значение переводится в аналоговый или ШИМ-сигнал.
AS5043 характеризуется возможностью однократного программирования пользователем параметров выходных характеристик датчика непосредственно в рабочих условиях.
После включения программирование AS5043 допускается нарастающим фронтом импульса CSn, при высоком уровне на входе Prog. 16-битная конфигурация данных должна быть последовательно записана в ОТР-регистр через вывод Prog. Последовательность битов включает: первый - бит направления вращения CCW, 10 битов данных о нулевом положении магнита Z [9:0] (первым идет наиболее значащий бит MSB) и настройки аналоговых режимов: FB_ext EN - настройка операционного усилителя (внешний или внутренний), RefExtEN - опорное напряжение ЦАП, ClampMd EN - режим (0=0-100%, 1=5-95% VDD), выбор режима Output Range (OR0, OR1): [1:0] 00=360°, 01=180°, 10=90°, 11=45° (фиг.17).
Важной особенностью AS5043 является то, что аналоговый выход может быть сконфигурирован различно: на работу в диапазонах угла 360°/180°/90° или 45° (точный тюнинг углового диапазона и регулировка наклона кривой могут быть выполнены настройкой выходной ступени ОРАМР), с внешним или внутренним опорным напряжением ЦАП, диапазоны выходного напряжения 0-100% VDD или 5-95% VDD, внешнее или внутреннее усиление.
После записи данных в ОТР-регистр данные могут быть защелкнуты нарастающим фронтом импульса на выводе Prog напряжения программирования UProg 16 импульсов CLK tzapp должны быть переданы для безопасности (фиг.18). Запрограммированные данные вступают в силу при следующем включении.
Для программирования нулевого положения магнит должен быть помещен в нулевое механическое положение системы.
Угловое положение, вычисляемое крестообразным массивом элементов Холла ИС, может быть промоделировано как
 ,
,
где Y1 и Y2, X1 и Х2 - сигналы элементов Холла. Нулевому углу ϕ будет соответствовать нулевой магнитный вектор при Y1 и Y2, равных 0. Фактическая ориентация нулевой плоскости магнитной симметрии в корпусе датчика не учитывается. Механическое нулевое положение прочитывается через SSI-интерфейс ИС и назначается как новое нулевое положение, которое может быть запрограммировано в ОТР-регистр. Изменением значения нулевого положения в ОТР регистре можно добиться согласования выхода с данным механическим положением.
В обычном режиме работы вывод AS5043 MagRngn является индикатором напряженности магнитного поля - выход с открытым коллектором низкого уровня индицирует выход магнитного поля из рекомендуемого диапазона ±(45...75 мТл). ИС будет все еще продолжать работать, но с ухудшенными характеристиками: данные будут доступны через SSI-интерфейс (фиг.13), но состояние низкого уровня MagRngn соответствует нулевым значениям аналоговых выходов AS5043.
Режим выравнивания AS5043 (или других ИС семейства AS504x: 10-битной AS5040. 12-битной AS5045) предназначен для центрирования магнита относительно ИС с целью достижения максимальной точности. Режим выравнивания в AS504x разрешается на падающем фронте импульсного вывода CSn при состоянии высокого уровня на выводе PROG. Биты данных SSI изменяются на значение выхода амплитуды смещения. Магнит выровнен, когда это значение является менее 32 на всех углах поворота рабочего углового диапазона (до 360°). Чем больше полученное значение, тем дальше находится магнит от его предпочтительного положения на конкретном угле поворота.
В режиме выравнивания AS504x биты MagINCn и MagDECn индицируют логическую единицу при значении амплитуды смещения менее 32.
В нормальный режим работы ИС семейства AS504x возвращается при повторной инициализации.
Специальное внимание уделяется вопросу выбора магнитов: магниты должны быть цилиндрической формы, диаметрально намагниченные. Austriamicrosystems рекомендует использовать с AS504x магнит ⊘6×3 (предпочтительно) из магнитных материалов любого из следующих типов: AlNiCo, SmCo5 или NdFeB. Магнитное поле, перпендикулярное поверхности сенсорного массива, в радиусе 1,1 мм должно составлять ±45...75 мТл, и его выход за эти пределы индицируется битами MagINCn и MagDECn. С магнитом ⊘6×3 рекомендуемое рабочее магнитное поле достигается на расстоянии 0,5...1,5 мм до поверхности ИС (плюс 0,576 мм до поверхности чувствительного массива). Компания Austriamicrosystems рекомендует также для своих датчиков AS5040/3/5 использовать специальные магниты ⊘6×2,5 BMN-35H Bomatec из материала NdFeB намагниченностью порядка 1,2 мТл.
Специальные возможности AS5043 обеспечиваются конфигурированием статуса входного вывода MODE. Абсолютное угловое положение оценивается со скоростью 10,4 кГц (0,1 мс) в быстром режиме (рекомендуется для полного диапазона 360°) или со скоростью 2,6 кГц (0,38 мс) в медленном (высокоточном и для углов ≤360°) режиме. В зависимости от состояния входа режима активируется или деактивируется внутренний фильтр, что используется для снижения цифрового джиттера и аналоговых выходных шумов.
Дополнительный признак безопасности AS5043 - ИС обеспечивает предупреждение в случае снижения питания.
Альтернативная элементная база ИС для конструкций данного типа - магнитные угловые энкодеры с линейным аналоговым или ШИМ-выходом, рассчитанные на программирование только в заводских условиях (ИС АМ512 RLS) или применяющие специальное конфигурирование выходов (iC-MA iC-Haus).
Например, для программируемой в заводских условиях АМ512 рекомендуемые размеры магнита ⊘4×4 мм Sm2Co17, с остаточной намагниченностью порядка 1050 мТл; типичное расстояние от поверхности магнита до поверхности сенсорного массива, локализованного на кремнии в радиусе 2,4 мм для АМ512, составит 2 мм. Амплитудное значение рабочего магнитного поля при этом составит порядка 35 мТл.
Те же размеры магнита (⊘4×4 мм) со значениями рабочей магнитной индукции порядка 20-100 мТл рекомендованы для iC-MA iC-Haus, поддерживающей 28 различных режимов работы, в том числе аналоговые: синусно-косинусные выходы, пилообразный резисторный выход для замещения потенциометров и треугольный выход (с амплитудным значением на 180°).
В конструкции датчика могут быть использованы магниты другой геометрии, с большими или меньшими расстояниями до ИС. Основные условия работоспособности датчика - рекомендуемые рабочие значения магнитной индукции, приведенные в таблице. Следует отметить, что хотя в заявляемом датчике могут использоваться магниты из любых материалов (Алнико, ферриты, SmCo или NdFeB), в автомобильных системах с повышенной рабочей температурой наиболее предпочтительным материалом является SmCo, имеющий лучшие свойства температурной стабильности.
В двухосевых измерениях ось вращения цилиндрического дипольного магнита центрирована с массивом измерительных элементов и является точкой отсчета полярной системы координат для определения угла ϕ поворота легкой оси (фиг.11), что ассоциируется с конфигурацией внешнего датчика, специально предназначенного для монтажа на торце вала.
Применение программируемой ИС двухосевого углового энкодера в комбинации с вращающимся постоянным магнитом, создающим рабочее поле, позволяет получать в диапазоне 360° четыре первичных аналоговых рабочих сигнала (фиг.32), что эквивалентно применению четырех аналоговых датчиков Холла классического типа в альтернативных конструкциях и означает упрощение конструкции, технологии сборки и монтажа. За счет качества сборки и однородности магнитных поверхностей достигается дальнейшее повышение точности и повторяемости измерений, повышение надежности.
Применение массива с четырьмя попарно ортогональными элементами Холла ассоциируется с чисто угловыми измерениями, при этом погрешность выравнивания магнита минимальна. Использование элементов Холла, объединенных в массив, дополнительно обеспечивает получение информации о направлении (угле поворота) магнитного поля при его периодическом изменении относительно массива чувствительных элементов, интегрированных в ИС Холла.
Магнитные угловые энкодеры типа AS5043 устойчивы к смещениям магнита и внешним магнитным возмущениям согласно дифференциальной технике измерений, вариациям воздушного зазора и температурным вариациям согласно синусно-косинусной оценке сигнала.
Кроме того, эффективные способы устранения смещения планарных элементов Холла, например метод «spinning current», позволяют достигать значений смещения порядка нескольких мкТл. Существуют также эффективные способы компенсации усилительной части такие, как техника автообнуления, согласованная двойная дискретизация.
ИС - магнитные угловые энкодеры с массивом чувствительных элементов Холла обеспечивают самое компактное решение для сканирования углового положения постоянного магнита, размещенного выше или ниже чувствительной поверхности ИС: используемый при этом магнит, диаметрально намагниченный и цилиндрической формы, может быть значительно меньших размеров по сравнению с магнитами для АМР-датчиков, традиционно используемых в аналогичной конфигурации. Высокая чувствительность интегральных датчиков - магнитных угловых энкодеров Холла позволяет использовать рабочий воздушный зазор во всех конфигурациях, достаточный для изоляции механической и электрической частей друг от друга.
Заявляемый датчик отражает, в первую очередь, введение в датчик углового положения на эффекте Холла, например, дроссельной заслонки или педали акселератора, описанные выше, магнитной системы на основе программируемой ИС двухосевого углового энкодера с линейным аналоговым или ШИМ-выходом в диапазоне угла 0...360°, и, вторично, развитие адаптационных признаков устройства к конкретным условиям работы через механику и схемотехнику (программирование) датчика.
Развитие адаптационных признаков к конкретным условиям работы достигается за счет применения двухосевой ИС энкодера Холла с массивом чувствительных элементов, интегрированной схемой обработки сигнала и готовым аналоговым или ШИМ интерфейсом, а также за счет введения механических ограничителей - упоров измеряемого угла и ограничителя осевых перемещений ротора, жестко закрепленного в корпусе датчика, дополнительно - за счет введения возвратной пружины кручения, например, в датчик положения дроссельной заслонки, показанный на фиг.1-4.
Введение ограничителя осевых перемещений позволяет увеличить магнитную чувствительность датчика (крутизну рабочих магнитных сигналов), использовать меньшие рабочие зазоры и более слабые магниты, или регулировать зазор, если это необходимо, одновременно с наблюдением состояния функционального вывода высоты магнита. При малых рабочих зазорах ограничитель полностью исключает риск физического разрушения микросхемы вследствие осевых биений привода дроссельной заслонки, педали и т.д., и механической вибрации.
По сравнению с магнитной системой, описанной выше, но без ограничителя осевых перемещений, введение ограничителя для использования малых рабочих зазоров означает увеличение амплитуды рабочего магнитного сигнала, при сохранении той же однородности и формы синусоидальных и косинусоидальных рабочих сигналов и, как следствие, их большую помехоустойчивость, увеличение надежности, повышение точности измерений, показателя линейности первичных аналоговых сигналов, используемых в ИС энкодера для вычисления углового положения, повторяемости.
Конструкция заявляемого устройства позволяет использовать для расположения ИС Холла любое постоянное расстояние от магнита, определяемое в данном случае из функциональных соображений (работоспособности), что означает упрощение конструкции устройства и технологии его сборки и монтажа.
Программирование в ИС нулевого положения магнита обеспечивает произвольный выбор в конструкции любого положения нулевой плоскости магнитной симметрии магнита относительно корпуса датчика. Электрический ноль может быть посредством программного обеспечения передвинут в любую точку механического диапазона (например, 30° или - 15°). Но в том случае, когда нулевое положение магнитной плоскости симметрии и механическое нулевое положение ротора относительно корпуса максимально приближены друг к другу, можно ожидать наиболее быстрого и точного (в условиях серийного производства) согласования вычислений арктангенса и уровней первичных магнитных синусно-косинусных сигналов именно на нулевой границе механического угла - в связи с возможными магнитными и механическими допусками.
Полезные признаки конструкции обеспечиваются за счет введения ориентирующих пазов (лыски) в установочной втулке датчика и втулке - корпусе магнита для быстрой механической подгонки положения отверткой, механических ограничителей осевых перемещений ротора с магнитом и измеряемого угла (упоров в корпусе датчика), а также введения возвратной пружины кручения для ограничения крутящего момента, если таковое не выполняется извне. Лыска в установочной втулке датчика и паз в корпусе магнита под отвертку обеспечивают идентичные технические характеристики серийно выпускаемых изделий.
Конструкция заявляемого датчика характеризуется простотой, технологичностью, надежностью, минимальным набором механических и электрических компонентов и максимальным набором адаптационных признаков к конкретным условиям работы, в том числе максимально адаптированным интерфейсом.
Минимизация электронных компонентов достигается за счет применения ИС энкодера Холла с высокой степенью интеграции (минимальный набор внешних интерфейсных компонентов применяется только в случае отсутствия идентичных интегрированных средств), а также за счет включения в контактный интерфейс датчика только функциональных выводов и сокращения числа вспомогательных выводов датчика, не используемых в дальнейшем после его однократного программирования, что означает дальнейшее упрощение конструкции устройства и технологии его сборки и монтажа.
На фиг.23 показано сравнение классической выходной характеристики датчика Холла и трех режимов заявляемого устройства на основе AS5043. Фиг.23 иллюстрирует расширение максимального механического, эффективного электрического и линейного диапазонов измеряемых углов заявляемого датчика, границы которых могуч принимать конкретные, как в примере с AS5043, значения в диапазоне 0...360°, программируемые при сборке, 360°/180°/90°/45°, так и могут регулироваться более плавно.
Высокие показатели линейности выходного сигнала и точности (≤+0,5°) обеспечиваются за счет интегральных технологий: дифференциального принципа квадратичного массива элементов, методов устранения смещения, например «spinning current», который реализован во всех ИС Austriamicrosystems, вычислительных и интерфейсных возможностей (теоретических принципов) энкодеров.
Таким образом, повышение точности измерений, повторяемости, линейности (линейности аналогового сигнала или дрейфа скважности ШИМ-сигнала), расширение функционального диапазона и линейного участка измеряемого угла до 360°, увеличение чувствительности, развитие адаптационных признаков к конкретным условиям работы, в том числе - прямое замещение аналоговых трехпроводных и двухпроводных (ШИМ) потенциометров, повышение надежности, дальнейшее упрощение конструкции устройства и технологии его сборки и монтажа достигаются за счет применения в датчике оптимизированной магнитной системы на основе цилиндрического дипольного магнита, создающего вращение направления магнитного вектора параллельно поверхности ИС двухосевого углового энкодера Холла с линейным или ШИМ-выходом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОГРАММИРУЕМЫЙ БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ С ЛИНЕЙНЫМ УГЛОВЫМ ДИАПАЗОНОМ В ПРЕДЕЛАХ 360° | 2006 |
|
RU2317522C2 |
| БЕСКОНТАКТНЫЙ ПРОГРАММИРУЕМЫЙ ДАТЧИК АБСОЛЮТНОГО УГЛОВОГО ПОЛОЖЕНИЯ В 360° | 2006 |
|
RU2312363C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ПЕДАЛИ | 2005 |
|
RU2301399C2 |
| Бесконтактный истинно двухосевой датчик угла поворота вала | 2014 |
|
RU2615612C2 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ДРОССЕЛЬНОЙ ЗАСЛОНКИ | 2005 |
|
RU2298148C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЛИНЕЙНОГО ИЛИ УГЛОВОГО ПЕРЕМЕЩЕНИЯ ОБОРУДОВАНИЯ ИЛИ МЕХАНИЗМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ВАРИАНТЫ) | 2009 |
|
RU2403204C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КОНСТРУКТИВНОГО ЭЛЕМЕНТА ГРУЗОПОДЪЕМНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376239C1 |
| Мехатронный модуль воздействия на педаль управления транспортно-технологического средства | 2022 |
|
RU2792709C1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ | 2010 |
|
RU2462724C2 |
| Абсолютный датчик угла поворота | 2023 |
|
RU2820033C1 |
Изобретение относится к автомобильному электронному приборостроению и может быть использовано для определения угла открытия дроссельной заслонки, степени нажатия педали акселератора, положения клапана рециркуляции отработавших газов. Устройство содержит ротор с диаметрально намагниченным магнитом, движущимся относительно неподвижного статора - программируемой интегральной схемы (ИС) двухосевого углового энкодера с аналоговым или ШИМ-выходом и интегрированным крестообразным массивом чувствительных элементов Холла. Магнит жестко установлен во втулке с пазами под отвертку. Втулка жестко устанавливается по результатам выравнивания магнита в установочной втулке ротора с выполненной в ней ориентирующей лыской или ориентирующим пазом для установки на вал. Поворот магнитного вектора ротора вычисляется по сигналам массива планарных элементов Холла, чувствительных к перпендикулярному полю ИС, на основе алгоритма CORDIC. Статор и ротор изолированы друг от друга за счет внутренней крышки-ограничителя, жестко зафиксированной поверх ротора. 3 з.п. ф-лы, 1 табл., 23 ил.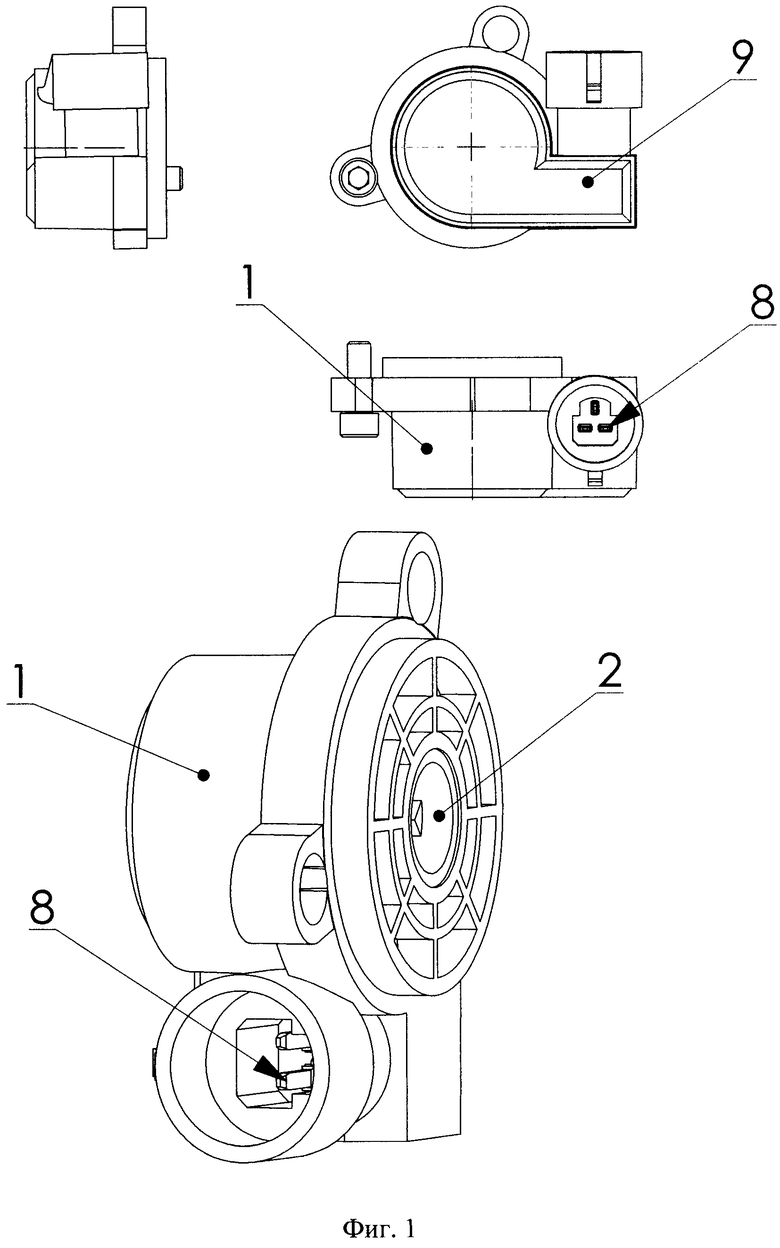
| ДАТЧИК ПОЛОЖЕНИЯ ЗУБА ЗУБЧАТОГО КОЛЕСА | 2001 |
|
RU2207575C2 |
| Преобразователь углового положения объекта | 1982 |
|
SU1067358A1 |
| ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2212087C2 |
| US 6577119 A, 10.06.2003 | |||
| US 6479987 В1, 12.11.2002 | |||
| US 6577119 А, 18.03.2003. | |||

