Область техники, к которой относится изобретение
Настоящее изобретение относится к роботу-уборщику, и более конкретно, к системе для автоматической замены чистящих инструментов робота-уборщика, который может автоматически заменять чистящие инструменты робота-уборщика, и способу автоматической замены.
Предшествующий уровень техники
В общем случае, робот-уборщик - это устройство для автоматической уборки заданной территории путем передвижения по дому (например, гостиной комнаты, большой комнаты, и т.д.) и засасывания инородных предметов, таких как пыль, с пола без помощи пользователя.
Робот-уборщик перемещается по предварительно заданному маршруту уборки и выполняет операции уборки в соответствии со встроенной программой. Для считывания позиций робота-уборщика, пройденного расстояния и препятствий около робота-уборщика используется множество датчиков, таким образом робот-уборщик может автоматически перемещаться по предварительно заданному маршруту и выполнять операции уборки.
Тем не менее, поскольку в роботе-уборщике установлены дорогостоящие датчики, обеспечивающие точное передвижение робота-уборщика по предварительно заданному маршруту и выполнение операций уборки, внутренняя структура робота-уборщика усложняется и себестоимость робота-уборщика увеличивается.
Чтобы решить вышеописанную проблему, необходим робот-уборщик, который бы произвольно передвигался по определенному маршруту уборки и выполнял операции уборки.
На фиг.1 представлена блок-схема известного устройства передвижения робота-уборщика, которая содержит блок 1 восприятия препятствия, когда робот-уборщик передвигается прямолинейно в определенной области и движется непосредственно на препятствие, блок 2 управления, предназначенный для остановки передвижения робота-уборщика на основании сигнала из блока 1 восприятия препятствия, генерирования произвольного угла на основании алгоритма случайных чисел и поворота робота-уборщика на произвольный угол, блок 3 привода левого колеса, предназначенный для приведения в действие привода 5 левого колеса робота-уборщика на определенной скорости в соответствии с сигналом управления, формируемым блоком 2 управления, и блок 4 привода правого колеса для приведения в действие привода 6 правого колеса робота-уборщика на определенной скорости в соответствии с сигналом, формируемым блоком 2 управления.
Работа известного робота-уборщика будет описана со ссылкой на фиг. 2.
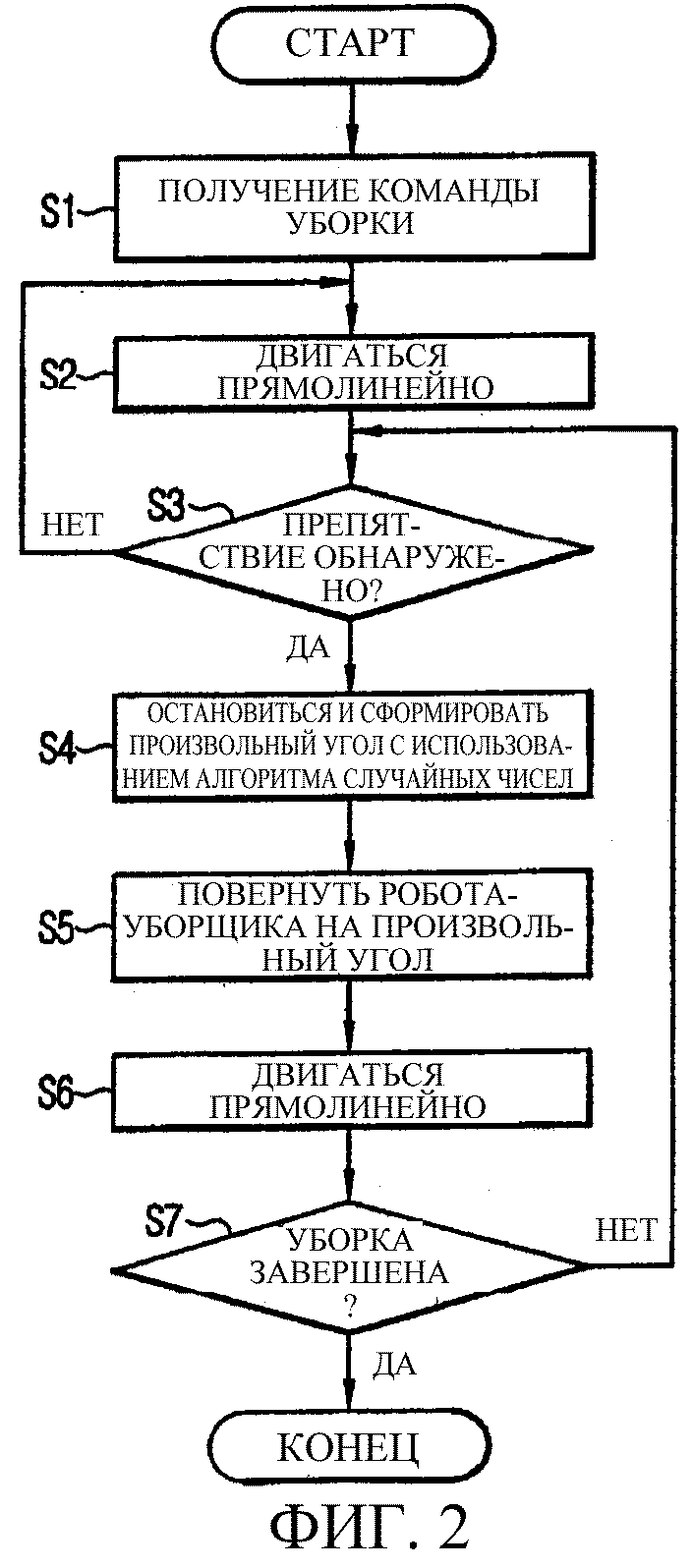
Как показано на фиг. 2, способ передвижения известного робота-уборщика включает в себя следующие шаги: вводят команду уборки, при этом робот-уборщик начинает передвигаться прямолинейно и обнаруживает препятствие (S1-S3); когда препятствие обнаружено, останавливают робота-уборщика и генерируют произвольный угол в соответствии с алгоритмом (S4) случайных чисел; используют этот произвольный угол в качестве угла поворота робота-уборщика и поворачивают робота-уборщика на угол (S5) поворота, задают, чтобы повернутый робот-уборщик передвигался прямолинейно (S6); и принимают решение о завершении операции уборки роботом-уборщиком, пока робот-уборщик передвигается прямолинейно, и останавливают передвижение робота-уборщика, когда он завершает операцию уборки.
Способ передвижения известного робота-уборщика описан более подробно ниже.
Когда команда уборки введена пользователем (S1), блок 2 управления формирует сигнал управления для уравнивания приводной скорости привода 5 левого колеса с приводной скоростью двигателя 6 правого колеса так, чтобы робот-уборщик мог двигаться прямолинейно.
Блок 3 привода левого колеса приводит в действие привод 5 левого колеса в соответствии с сигналом управления, а блок 4 привода правого колеса приводит в действие привод 6 правого колеса в соответствии с сигналом управления. Таким образом, робот-уборщик передвигается прямолинейно благодаря приводу 5 левого колеса и приводу 6 правого колеса (S2).
При прямолинейном перемещении робота-уборщика, если он движется на препятствие, блок 1 восприятия препятствия обнаруживает препятствие по толчку и передает сигнал восприятия препятствия в блок 2 управления (S3).
Блок 2 управления останавливает перемещение робота-уборщика в соответствии с сигналом восприятия препятствия, генерирует произвольный угол в соответствии с алгоритмом случайных чисел (S4) и выводит сигнал управления для применения произвольного угла в качестве угла поворота робота-уборщика. В этот момент блок 2 управления выводит сигналы управления на блок 3 привода левого колеса и блок 4 привода правого колеса, согласно которому скорость привода 5 левого колеса отличается от скорости привода 6 правого колеса, таким образом робот-уборщик может поворачиваться на произвольный угол поворота.
Блок 3 привода левого колеса приводит в действие привод 5 левого колеса в соответствии с сигналом управления от блока 2 управления, а блок 4 привода правого колеса приводит в действие привод 6 правого колеса в соответствии с сигналом управления от блока 2 управления. В результате робот-уборщик поворачивается на произвольный угол (S5).
После этого блок 2 управления формирует сигналы управления, подаваемые на блок 3 привода левого колеса и блок 4 правого колеса, для уравнивания скорости привода 5 левого колеса со скоростью привода 6 правого колеса. Таким образом робот-уборщик передвигается прямолинейно (S6).
Пока робот-уборщик передвигается прямолинейно, принимается решение о завершении операции уборки. Когда операция уборки завершена, передвижение робота-уборщика останавливают и операцию уборки заканчивают. Когда операция уборки не завершена, процедура возвращается назад к этапу восприятия препятствия, чтобы повторить указанные шаги.
Тем не менее, известные роботы-уборщики имеют недостаток, заключающийся в том, что пользователь должен проверять состояние уборки робота-уборщика и заменять чистящий инструмент другим чистящим инструментом, используемым для пола. Соответственно, известный робот-уборщик создает неудобства пользователю. Более того, когда пользователь ошибочно оценивает состояние пола в области уборки, известный робот-уборщик не может эффективно очистить область уборки.
Краткое изложение сущности изобретения
Технической задачей настоящего изобретения является создание системы для автоматической замены чистящих инструментов робота-уборщика, которая позволяет избежать замены чистящих инструментов пользователем вручную путем автоматической замены чистящих инструментов, и способа автоматической замены чистящих инструментов робота-уборщика.
Другой задачей настоящего изобретения является создание системы и способа для автоматической замены чистящих инструментов робота-уборщика, которые обеспечивают уменьшение размеров и веса робота-уборщика, увеличивающихся за счет использования различных чистящих инструментов, установленных на роботе-уборщике, путем замены чистящих инструментов, используя зарядное устройство для зарядки робота-уборщика.
Поставленная задача, согласно изобретению, решена путем создания системы для автоматической замены чистящих инструментов робота-уборщика, содержащей робота-уборщика для принятия решения, является ли в настоящее время присоединенный первый чистящий инструмент подходящим для состояния пола области уборки и возвращения и пристыковки к блоку замены, когда первый чистящий инструмент не подходит для состояния пола; и замены предназначенного для замены первого чистящего инструмента, присоединенного в текущий момент к роботу-уборщику, на второй чистящий инструмент, подходящий для состояния пола, когда робот-уборщик пристыкован.
В соответствии с другим аспектом настоящего изобретения, в роботе-уборщике, имеющем функцию самоуправления, способ для автоматической замены чистящих инструментов робота-уборщика включает следующие этапы: определение состояние пола области уборки в процессе уборки; принятие решения, является ли присоединенный в текущий момент первый чистящий инструмент подходящим для указанного состояния пола, и возвращение и пристыковка робота-уборщика к блоку замены, когда первый чистящий инструмент не подходит для состояния пола; и замены в блоке замены первого чистящего инструмента, присоединенного к роботу-уборщику, на второй чистящий инструмент, подходящий для определенного состояния пола.
Краткое описание чертежей
Вышеупомянутые и другие аспекты и преимущества настоящего изобретения станут более очевидными из приведенного ниже подробного описания предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает блок-схему устройства передвижения известного робота-уборщика;
фиг. 2 - блок-схему последовательности этапов способа замены чистящих инструментов известного робота-уборщика;
фиг. 3 - блок-схему системы для автоматической замены чистящих инструментов робота-уборщика, согласно изобретению;
фиг. 4 - блок-схему последовательности этапов способа для автоматической замены чистящих инструментов робота-уборщика согласно изобретению;
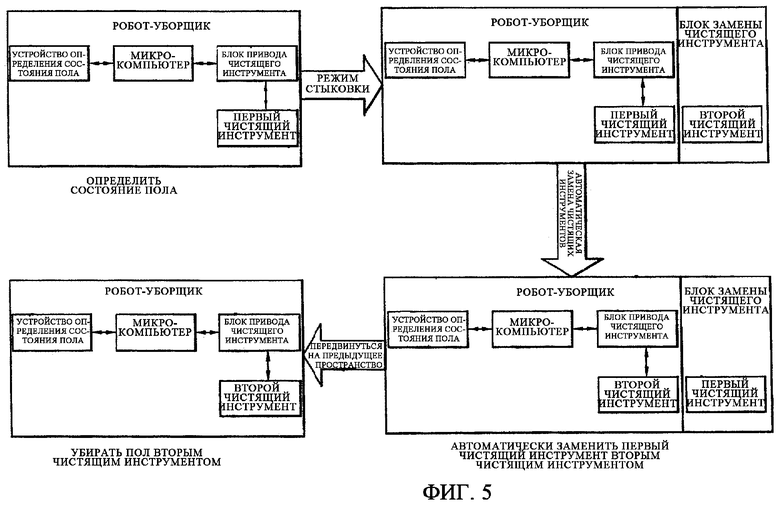
фиг. 5 - схему процесса для автоматической замены чистящих инструментов робота-уборщика согласно изобретению.
Подробное описание предпочтительных вариантов
осуществления изобретения
Система для автоматической замены чистящих инструментов робота-уборщика и способ для этого, которые могут исключить неудобства, связанные с заменой чистящих инструментов вручную и уменьшить размеры и вес робота-уборщика, которые увеличиваются за счет различных чистящих инструментов, устанавливаемых на роботе-уборщике, путем автоматической замены чистящих инструментов, используя зарядное устройство для зарядки робота-уборщика, описаны подробно со ссылкой на фиг. 3-5.
На фиг. 3 представлена блок-схема системы для автоматической замены чистящих инструментов робота-уборщика в соответствии с настоящим изобретением.
Система для автоматической замены чистящих инструментов робота-уборщика содержит робота-уборщика 310 для принятия решения, является ли присоединенный в текущее время первый чистящий инструмент подходящим для состояния пола области уборки и возвращения и пристыковки к блоку 320 замены, когда первый чистящий инструмент не подходит для состояния пола. Система содержит также блок 320 замены, предназначенный для замены первого чистящего инструмента, присоединенного в текущий момент к роботу-уборщику 310, на второй чистящий инструмент, подходящий для состояния пола, когда робот-уборщик 310 пристыкован. Робот-уборщик 310 дополнительно содержит блок ввода (не показан) для приема входного сигнала, касающегося способа уборки, выбранного пользователем. Блок 320 замены заменяет первый чистящий инструмент на второй чистящий инструмент, подходящий для выбранного способа уборки.
Ниже система для автоматической замены чистящих инструментов робота-уборщика в соответствии с настоящим изобретением описана более подробно.
Робот-уборщик 310 содержит блок 311 определения состояния пола области уборки, микрокомпьютер 312 для переключения режима робота-уборщика 310 в режим замены чистящего инструмента в соответствии с результатом определения блоком 311 определения состояния пола и передачи информации о состоянии пола на блок 320 замены, блок 314 присоединения чистящих инструментов, на котором закреплены чистящие инструменты, и блок 313 привода чистящих инструментов, предназначенный для приведения в действие присоединенного чистящего инструмента. Микрокомпьютер 312 может принимать входной сигнал, относящийся к способу уборки, выбранному пользователем, через блок ввода (не показан). Типичные состояния пола, определенные блоком 311 определения состояния пола, включают в себя твердый пол, ковер, влажные или жирные пятна. Различные способы для определения состояния пола блоком 311 определения состояния пола широко известны, и их описание опущено.
Микрокомпьютер 312 передает информацию о состоянии пола на блок 320 замены по радиочастотной связи или инфракрасной связи. Дополнительно, микрокомпьютер 312 может передавать информацию о выбранном способе уборки на блок 320 замены по радиочастотной связи или инфракрасной связи.
Блок 320 замены содержит чувствительный блок 321 для определения положения и направления перемещения робота-уборщика 310 и блока 320 замены, блок 322 хранения чистящих инструментов, блок 323 замены первого чистящего инструмента, присоединенного в текущее время к роботу-уборщику 310, на второй чистящий инструмент, выбранный из чистящих инструментов, находящихся в блоке 322 хранения чистящих инструментов, и блок 324 управления для выбора второго чистящего инструмента из различных чистящих инструментов, находящихся в блоке 322 хранения чистящих инструментов, на основании информации о состоянии пола, определенной роботом-уборщиком 310, и пристыковки блока 320 замены и робота-уборщика 310 в соответствии с сигналом, определенным чувствительным блоком 321 восприятия. Блок 324 управления может выбирать второй чистящий инструмент из различных чистящих инструментов, находящихся в блоке 322 хранения чистящих инструментов, на основании информации о выбранном способе уборке. Способ замены первого чистящего инструмента на второй чистящий инструмент может представлять собой способ для замены инструментов автоматического устройства смены инструментов (ATC) токарного станка с числовым программным управлением. Чистящие инструменты включают в себя инструмент в виде резинового скребка, в виде швабры, в виде жесткой щетки и паровой инструмент.
Функционирование системы для автоматической замены чистящих инструментов робота-уборщика в соответствии с настоящим изобретением описано более подробно ниже со ссылкой на фиг. 4.
В роботе-уборщике, имеющем функцию самостоятельного управления передвижением (фиг. 4), способ автоматической замены чистящих инструментов робота-уборщика включает в себя этапы выполнения операции уборки (S41), определения состояния пола области уборки в процессе операции уборки (S42), принятия решения подходит ли в текущий момент присоединенный первый чистящий инструмент для определенного состояния пола (S43), переключения режима робота-уборщика в режим замены чистящего инструмента, когда первый чистящий инструмент не подходит для состояния пола (S44), возвращения и стыковки робота-уборщика, входящего в режим замены чистящего инструмента в блоке замены (S45), и замены в блоке замены первого чистящего инструмента, присоединенного к роботу-уборщику, на второй чистящий инструмент, походящий для определенного состояния пола (S46). Здесь, этап определения (S42) дополнительно включает в себя этап для получения входного сигнала, относящегося к способу уборки, выбранному пользователем, а этап принятия решения (S43) дополнительно включает в себя этап принятия решения, подходит ли первый чистящий инструмент для уборки, выбранной пользователем, и этап замены (S46) дополнительно включает в себя этап замены первого чистящего инструмента, присоединенного к роботу-уборщику, на второй чистящий инструмент, подходящий для способа уборки, выбранного пользователем.
Функционирование системы для автоматической замены чистящих инструментов робота-уборщика в соответствии с настоящим изобретением описано ниже более подробно.
Робот-уборщик 310 выполняет операцию уборки пола посредством использования специального чистящего инструмента (первый чистящий инструмент), предварительно присоединенного в блоке 314 присоединения чистящих инструментов (S41).
При выполнении операции уборки пола (S41) блок 311 определения состояния пола робота-уборщика 310 определяет состояние пола области уборки (S42). Блок 311 определения состояния пола передает информацию о состоянии пола на микрокомпьютер 312, и блок ввода (не показан) передает входной сигнал, относящийся к способу уборки, на микрокомпьютер 312. Робот-уборщик 310 дополнительно выполняет этап ввода для получения входного сигнала, относящегося к способу уборки, выбранному пользователем. Пол включает в себя твердый пол, ковер и может иметь влажные или жирные пятна. Различные способы для определения состояния пола (S42) широко известны, и их описание опущено.
Соответственно микрокомпьютер 312 анализирует информацию о состоянии пола от блока 311 определения состояния пола или информацию о выбранном способе уборки и принимает решение, следует ли первый чистящий инструмент, присоединенный к роботу-уборщику 310, заменить на основании результатов анализа (S43).
Когда первый чистящий инструмент, присоединенный к роботу-уборщику 310, следует заменить, робот-уборщик 310 останавливает операцию уборки и переходит в режим замены чистящего инструмента (S44).
Робот-уборщик, перешедший в режим замены чистящего инструмента, возвращается к блоку 320 замены и стыкуется с блоком 320 замены. Блок 320 замены может быть выполнен в форме зарядного устройства для зарядки робота-уборщика 310. С другой стороны, способ для возвращения робота-уборщика на специальную позицию (блок 320 замены или зарядное устройство) и устройство для реализации широко известны, и их описание не приводится.
Когда робот-уборщик 310 стыкуется с блоком 320 замены (S45), микрокомпьютер 312 передает информацию о состоянии пола или информацию о выбранном способе уборки на блок 324 управления блока 320 замены. Информация о состоянии пола или информация о выбранном способе уборки может быть передана на блок 324 управления блока 320 замены по радиочастотной связи или инфракрасной связи. Кроме того, информация о состоянии пола или информация о выбранном способе уборки может быть передана перед тем, как робот-уборщик 310 состыкован с блоком 320 замены.
Блок 324 управления блока 320 замены выбирает второй чистящий инструмент из различных чистящих инструментов, находящихся в устройстве 323 хранения чистящих инструментов, на основании информации от робота-уборщика 310. Блок 324 управления отсоединяет первый чистящий инструмент, присоединенный к блоку 314 присоединения чистящего инструмента робота-уборщика 310 от робота-уборщика 310, и присоединяет второй чистящий инструмент к блоку 314 присоединения чистящего инструмента робота-уборщика 310. Блок 324 управления передает отсоединенный первый чистящий инструмент в блок 322 хранения чистящих инструментов.
Микрокомпьютер 312 робота-уборщика 310 присоединяет второй чистящий инструмент, присоединенный к блоку 314 присоединения чистящего инструмента робота-уборщика 310, к блоку 313 привода чистящего инструмента робота-уборщика 310.
После этого робот-уборщик 31, к которому был присоединен второй чистящий инструмент, возобновляет операцию уборки и при этом использует второй чистящий инструмент, соединенный с блоком 313 привода чистящего инструмента.
На фиг. 5 представлена схема процесса для автоматической замены чистящих инструментов робота-уборщика в соответствии с настоящим изобретением.
Состояние пола области уборки определяется блоком определения состояния пола, прикрепленным к роботу-уборщику, второй чистящий инструмент выбирается в соответствии с результатами определения, и присоединенный в текущий момент первый чистящий инструмент автоматически заменяется на второй чистящий инструмент в блоке замены.
Как было описано выше, в соответствии с настоящим изобретением, система и способ для автоматической замены чистящих инструментов робота-уборщика позволяют исключить ручную замену чистящих инструментов и уменьшить размеры и вес робота-уборщика, которые увеличиваются за счет различных чистящих инструментов, установленных на роботе-уборщике, путем автоматической замены чистящих инструментов, используя зарядное устройство для зарядки робота-уборщика.
Настоящее изобретение может быть осуществлено в различных формах без отступления от сущности изобретения, причем вышеописанные варианты осуществления не ограничиваются приведенным описанием.


Система и способ могут быть использованы для автоматической замены чистящих инструментов робота-уборщика. Система содержит робот-уборщик, который принимает решение, подходит ли в текущий момент присоединенный первый чистящий инструмент для состояния пола в области уборки. В случае, если первый чистящий инструмент не подходит для уборки, то робот-уборщик возвращается к блоку замены и пристыковывается к нему для замены первого чистящего инструмента, присоединенного в текущий момент к роботу-уборщику на второй чистящий инструмент, подходящий для состояния пола. Система содержит блок присоединения чистящего инструмента, на котором закреплены чистящие инструменты, блок ввода для приема входного сигнала, относящегося к способу уборки, выбранному пользователем, микрокомпьютер для переключения режима робота-уборщика в режим замены. Блок замены имеет чувствительный блок для определения положения и направления перемещения робота-уборщика и устройства замены, блок хранения чистящих инструментов, блок замены чистящего инструмента, предназначенный для замены первого чистящего инструмента, присоединенного в текущий момент к роботу-уборщику, на второй чистящий инструмент, выбранный из различных чистящих инструментов, находящихся в блоке хранения, блок управления для выбора второго чистящего инструмента из различных чистящих инструментов на основании информации о состоянии пола, определенной роботом-уборщиком, и пристыковки блока замены и робота-уборщика в соответствии с сигналом чувствительного блока. Блок замены может быть реализован в виде зарядного устройства для зарядки робота-уборщика. Способ для автоматической замены чистящих инструментов робота-уборщика, имеющего функцию самостоятельного управления передвижением, заключается в том, что определяют состояние пола области уборки во время операции уборки, принимают решение, подходит ли присоединенный в настоящее время первый чистящий инструмент для определенного состояния пола. Затем возвращают и стыкуют робота-уборщика с блоком замены, когда первый чистящий инструмент не подходит для состояния пола. Заменяют в блоке замены, первый чистящий инструмент, присоединенный к роботу-уборщику, на второй чистящий инструмент, подходящий для определенного состояния пола. На этапе стыковки передают информацию об определенном состоянии пола в блок замены. На этапе замены принимают в блоке замены информацию о состоянии пола от робота уборщика, выбирают второй чистящий инструмент из различных чистящих инструментов в соответствии с принятой информацией, заменяют первый чистящий инструмент, присоединенный к роботу-уборщику, на выбранный второй чистящий инструмент. В процессе замены отсоединяют первый чистящий инструмент, присоединенный к роботу-уборщику, присоединяют второй чистящий инструмент, находящийся в блоке замены, к роботу-уборщику и передают отсоединенный первый чистящий инструмент в блок замены. Возможен вариант осуществления способа, в котором выбирают способ уборки в процессе операции уборки. Система и способ обеспечивают уменьшение размеров и веса робота-уборщика путем замены чистящих инструментов, используя зарядное устройство для зарядки робота-уборщика, и повышают эффективность уборки безошибочным определением состояние пола в области уборки. 4 н. и 11 з.п. ф-лы, 5 ил.
| US 5959423 А, 28.09.1999 | |||
| US 6374155 B1, 16.04.2002 | |||
| DE 10231391 A1, 12.02.2004 | |||
| DE 4340771 A1, 15.12.1994 | |||
| RU 2001118749 A, 27.03.2003. |

