Изобретение относится к области бронетанковой техники, в частности, к системам управления огнем, обеспечивающим наблюдение поля боя и управление вооружением.
Современные объекты бронетанковой техники (ОБТ) оснащаются системами управления огнем (СУО), позволяющими использовать вооружение боевой машины с максимальной эффективностью днем и ночью, на месте и в движении.
С этой целью в СУО используются прицельные комплексы, имеющие в своем составе несколько прицелов, основанных на различных физических принципах:
- оптика прямого видения;
- оптика ночного видения на электронно-оптических преобразователях;
- тепловизионная аппаратура спектрального диапазона 3-14 мкм.
Для наблюдения и прицеливания при движении ОБТ в прицелах обеспечивается стабилизация поля зрения, которая может быть:
- независимой (с использованием встроенных гиростабилизирующих устройств);
- зависимой (с использованием механического соединения отклоняющего зеркала с орудием, положение которого стабилизируется посредством стабилизатора основного вооружения).
Для повышения боевых возможностей в СУО должно обеспечиваться совмещение оптических осей и синхронное управление линиями визирования различных прицелов, образующих прицельный комплекс.
Известны различные варианты построения СУО.
СУО танка Т-80У - комплекс 1А45 (см. техническое описание БЛ1.335.066ТО) содержит дневной прицел 1Г46 и ночной прицельный комплекс Т01-К01 с прицелом TПH-4 (см. техническое описание БЛ1.335.055ТО). Дневной прицел имеет независимую стабилизацию поля зрения в плоскости вертикального (ВН) и горизонтального (ГН) наведения.
Ночной прицел ТПН-4 имеет зависимую стабилизацию в обеих плоскостях.
Недостатками данного варианта СУО являются большие погрешности стабилизации поля зрения ночного прицела (срединная ошибка на уровне 0,6 мрад), что затрудняет наблюдение и прицеливание в движении.
Угол прицеливания в ночном прицеле вводится вручную путем смещения прицельной сетки. Так как зеркало прицела механически связано с орудием, не может быть использован режим автоматического ввода углов прицеливания и бокового упреждения в привода орудия и башни, что снижает эффективность применения вооружения.
Известен также вариант СУО танка Т-80У, где в состав комплекса 1А45 вместе с дневным прицелом 1Г46 входит тепловизионный прицел Т01-П02 (см. техническое описание БЛ1.335.078ТО).
Дневной прицел наводчика 1Г46 установлен в башне танка и включает гиростабилизирующие устройства, датчики угла, вертикальное и горизонтальное зеркала.
Указанные элементы обеспечивают независимую стабилизацию поля зрения и линии прицеливания в плоскости ВН и ГН.
Стабилизация линии прицеливания в плоскости ВН осуществляется гиростабилизатором, наружная рамка которого посредством кинематической передачи связана с вертикальным зеркалом. Гироскоп, обеспечивая стабилизацию линии прицеливания, одновременно выполняет роль датчика угла системы стабилизации орудия. Для этого ротор датчика угла связан с вертикальным зеркалом, а статор датчика угла крепится на корпусе гиростабилизатора, который кинематически связан с орудием параллелограммным механизмом.
Стабилизация орудия в плоскости ВН осуществляется относительно линии прицеливания. При движении танка привод ВН по сигналу датчика угла автоматически воздействует на орудие, установленное в цапфенных узлах башни, стремясь придать ему положение, согласованное с линией прицеливания.
Стабилизация линии прицеливания в плоскости ГН осуществляется гиростабилизатором, кинематически связанным с горизонтальным зеркалом. Угол поворота башни с орудием относительно линии прицеливания в плоскости ГН измеряется датчиком угла, ротор которого кинематически связан с горизонтальным зеркалом, а статор жестко соединен с корпусом прицела и башней.
Сигнал с датчика угла, пропорциональный углу рассогласования линии прицеливания и оси канала ствола орудия, поступает на вход привода ГН, который автоматически воздействует на башню и устраняет рассогласование, стремясь придать башне с орудием положение, согласованное с линией прицеливания.
Тепловизионный прицел Т01-П02 установлен в башне танка, при этом горизонтальная ось зеркала прицела связана с осью качания орудия посредством механизма связи, представляющего собой систему тяг с подшипниковыми узлами и промежуточным валом. Таким образом осуществляется зависимая стабилизация поля зрения тепловизионного прицела вместе с орудием в плоскости ВН и ГН.
Углы прицеливания и бокового упреждения вводятся в привод вертикального наведения (ВН) и привод горизонтального наведения (ГН) соответственно по сигналам баллистического вычислителя.
К недостаткам рассматриваемой системы следует отнести:
- низкую точность зависимой стабилизации поля зрения тепловизионного прицела (срединная ошибка до 0,4 мрад в плоскости ВН и до 0,6 мрад в плоскости ГН), что затрудняет наблюдение и прицеливание при движении боевой машины;
- затягивание времени подготовки выстрела при работе с тепловизионным прицелом, так как невозможно производить слежение за целью и дальнометрирование в процессе цикла автоматического заряжания, когда орудие стопорится на угле заряжания;
- ограниченные возможности по управлению вооружением от тепловизионного прицела, обусловленные низкой точностью синхронного слежения линий визирования дневного и тепловизионного прицелов.
Кроме этого, в отдельных режимах отсутствует синхронное слежение линий визирования двух прицелов.
Задачей настоящего изобретения является придание СУО боевой машины возможности одинаково эффективно осуществлять управление вооружением от двух различных прицелов за счет стабилизации поля зрения в плоскости вертикального и горизонтального наведения, совмещения и синхронного управления поворотом линий визирования двух прицелов с высокой точностью.
Для решения поставленной задачи и устранения отмеченных недостатков предлагается СУО, содержащая:
- установленный в башне машины первый прицел с двухстепенной стабилизацией поля зрения, включающий первый датчик угла, кинематически связанный с горизонтальным зеркалом, а также второй датчик угла, ротор которого связан с вертикальным зеркалом, а статор через первый механизм передачи кинематически связан с осью качания орудия, закрепленного в цапфенных узлах башни;
- датчик положения, связанный с осью качания орудия вторым механизмом передачи;
- привод вертикального наведения, кинематически связанный с осью качания орудия, вход которого соединен с выходом второго датчика угла;
- закрепленный в корпусе машины и кинематически связанный с башней привод горизонтального наведения, вход которого соединен с выходом первого датчика угла;
- установленный в башне второй прицел, включающий зеркальный отражатель с горизонтальной осью: платформа с вертикальной осью, размещенная в подшипниках прицела, горизонтальная ось зеркального отражателя при этом размещена в подшипниках платформы;
- двухосный гироскопический стабилизатор, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 2:1 с горизонтальной осью зеркального отражателя;
- кинематически связанный с вертикальной осью платформы регулятор, вход которого соединен с выходом двухосного гироскопического стабилизатора;
- третий и четвертый датчики угла, кинематически связанные соответственно с горизонтальной осью зеркального отражателя и вертикальной осью платформы;
- первый корректор, вход которого соединен с выходом третьего датчика угла;
- второй корректор, вход которого соединен с датчиком положения;
- первый сумматор, первый, второй и третий входы которого соединены соответственно с выходом первого корректора, выходом четвертого датчика угла и выходом первого датчика угла, а выход соединен с первым входом двухосного гироскопического стабилизатора;
- второй сумматор, первый, второй, третий и четвертый входы которого соединены соответственно с выходом третьего датчика угла, выходом датчика положения, выходом второго корректора и выходом второго датчика угла, а выход соединен с вторым входом двухосного гироскопического стабилизатора.
Введение двухосного гироскопического стабилизатора (ДГС), кинематически связанного с зеркальным отражателем, размещенным в подшипниках платформы, регулятора, электрически подключенного к ДГС, обеспечивает независимую стабилизацию поля зрения в вертикальной и горизонтальной плоскостях. Это создает необходимые условия для наблюдения за целью и прицеливание через второй прицел в движении не хуже, чем при работе через первый.
Введение сумматоров, датчиков угла. кинематически связанных с вертикальной осью платформы и горизонтальной осью зеркального отражателя и подключенных к датчикам угла первого прицела и датчику положения, позволяет объединить два автономно работающих прицела в единый прицельный комплекс, в котором обеспечивается синхронное управление линиями визирования двух прицелов и совместное использование технических возможностей каждого из прицелов.
Введение первого корректора позволяет устранить погрешности синхронного слежения линий визирования первого и второго прицелов, обусловленные неточностью их установки на башне.
Введение второго корректора компенсирует погрешность передачи угла от датчика положения и второго датчика, обусловленную неточностью механизмов передачи.
Предлагаемая СУО была реализована в танке Т-90С, что существенно повысило боевые возможности машины.
Проведенные испытания подтвердили возможность использования ночью вооружения боевой машины с высокой эффективностью.
Качество стабилизации поля зрения второго прицела (тепловизионного прицела) не уступает первому прицелу (основной прицел наводчика).
Время подготовки выстрела при работе через второй прицел не превышает времени подготовки через первый прицел.
Успешно решена задача стрельбы сходу управляемой ракетой ночью.
Погрешность совмещения и синхронного слежения линий визирования двух прицелов не превышает 0,5 угл. мин. во всем диапазоне углов прокачки орудия.
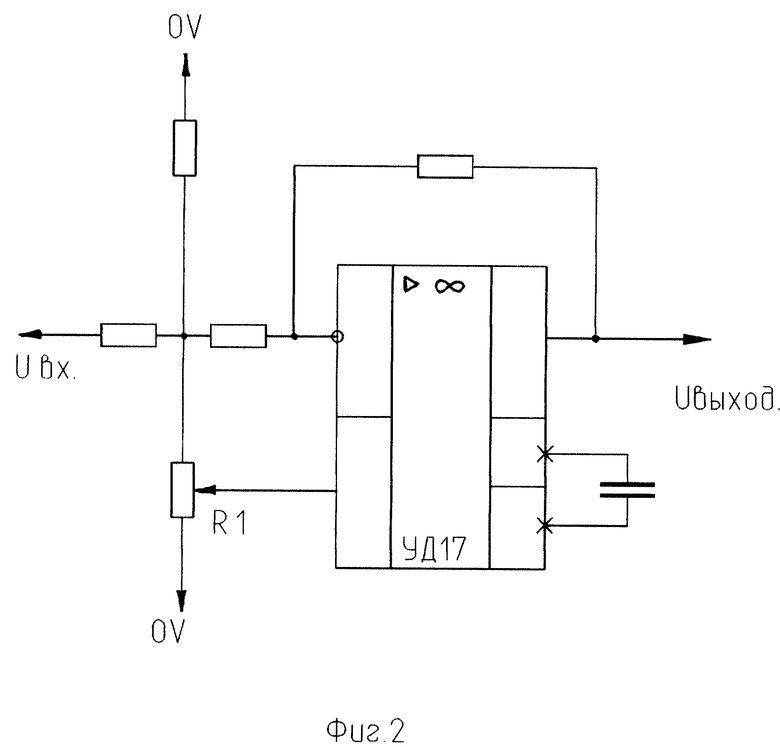
На фиг.1 представлена структурно-кинематическая схема СУО.
На фиг.2 представлена принципиальная электрическая схема корректора.
СУО содержит первый 1 и второй 2 прицелы, установленные на башне 3, орудие 4, датчик положения 5, первый 6 и второй 7 механизмы передачи, привод ВН 8, привод ГН 9, первый 10 и второй 11 корректоры, первый 12 и второй 13 сумматоры.
Первый прицел 1 имеет первый датчик угла 14, кинематически связанный с горизонтальным зеркалом, и второй датчик угла 15, ротор которого кинематически связан с вертикальным зеркалом, а статор через первый механизм передачи 6 кинематически связан с осью качания орудия 4, закрепленного в цапфенных узлах башни 3.
На башне 3 установлен датчик положения 5, кинематически связанный вторым механизмом передачи 7 с осью качания орудия. Кинематически связанный с осью качания орудия 4 привод ВН 8, вход которого соединен с выходом второго датчика угла 15.
В корпусе 16 машины закреплен и кинематически связан с башней 3 привод ГН 9, вход которого соединен с выходом первого датчика угла 14.
Второй прицел 2 включает платформу 17 с вертикальной осью, размещенную в подшипниках прицела, зеркальный отражатель 18 с горизонтальной осью, размещенной в подшипниках платформы 17, двухосный гироскопический стабилизатор (ДГС) 19. выходная ось которого размещена в подшипниках платформы 17 и кинематически связана передачей 2:1 с горизонтальной осью зеркального отражателя 18, кинематически связанный с вертикальной осью платформы 17 регулятор 20, вход которого соединен с выходом ДГС 19, третий 21 и четвертый 22 датчики угла, кинематически связанные соответственно с горизонтальной осью зеркального отражателя 18 и вертикальной осью платформы 17.
Первый 10 и второй 11 корректоры, входы которых соответственно соединены с выходом третьего датчика угла 21 и датчика положения 5.
Первый сумматор 12, первый, второй и третий входы которого соединены соответственно с выходами первого корректора 10, четвертого датчика угла 22, первого датчика угла 14, а выход соединен с первым входом ДГС 19.
Второй сумматор 13, первый, второй, третий и четвертый входы которого соединены соответственно с выходами третьего датчика угла 21, датчика положения 5, второго корректора 11, второго датчика угла 15, а выход соединен с вторым входом ДГС 19.
Первый прицел 1 предназначен для стабилизации поля зрения в плоскости ВН и ГН, управления линией визирования (прицеливания).
Первый ДУ 14 выдает сигнал, пропорциональный углу поворота линии визирования (прицеливания) относительно башни 3 в плоскости ГН, второй ДУ 15 выдает сигнал, пропорциональный углу поворота линии визирования относительно орудия в плоскости ВН. В качестве первого прицела используется прицел 1Г46. Второй прицел 2 предназначен для стабилизации поля зрения в плоскости ВН и ГН и обеспечивает синхронное слежение линии визирования за линией визирования первого прицела 1.
Третий датчик угла 21 выдает сигнал, пропорциональный углу поворота линии визирования относительно башни в плоскости ВН, в качестве датчика угла применен вращающийся трансформатор 2,5Вт 0,05/0,1 ЛШЗ.010.399.ЛШО.301.014ТУ.
Четвертый датчик угла 22 выдает сигнал, пропорциональный углу поворота линии визирования относительно башни в плоскости ГН, в качестве датчика угла применен индукционный датчик 15Д32 6С2.320.016-2ТУ.
ДГС 19 предназначен для стабилизации поля зрения в плоскости ВН и выдачи сигнала, пропорционального угловому отклонению линии визирования относительно стабилизируемого направления в плоскости ГН.
Основными элементами ДГС являются малогабаритный гироскоп (МГ) и одноосный гироскопический стабилизатор (ОГС).
ОГС предназначен для стабилизации поля зрения в плоскости ВН.
ОГС установлен в подшипниках платформы таким образом, что его выходная ось расположена параллельно горизонтальной оси зеркального отражателя.
Конструктивная схема реализации и принцип работы ОГС с контуром управления описаны, например, в книге Д.С. Пельпор "Гироскопические системы", часть 1, "Высшая школа", 1971 г.
МГ жестко связан с выходной осью ОГС, при этом оси чувствительности МГ расположены соосно с вертикальной осью платформы и горизонтальной осью зеркального отражателя.
Первый выход МГ соединен с регулятором 20 второго прицела 2, второй выход МГ соединен с контуром управления ОГС.
Основными элементами гироскопа являются ротор, задающий стабилизируемое направление, электродвигатель, упругий подвес, датчики угла, датчики момента.
Конструктивные схемы реализации гироскопа и принцип работы описаны, например, в книге Д.С. Пельпор "Динамически настраиваемые гироскопы". Машиностроение, 1988 г. Конкретный ДГС выполнен с использованием малогабаритного гироскопа МГ-4 КМИВ.402132.002 ТУ.
Регулятор 20 предназначен для стабилизации и управления платформы 17 с зеркальным отражателем 18 в плоскости ГН по сигналам, поступающим с ДГС 19, и выполнен в соответствии с авторским свидетельством СССР 1640668.
Сумматоры 12, 13 предназначены для формирования электрического сигнала, пропорционального угловому рассогласованию линий визирования первого и второго прицелов соответственно в плоскости ГН и ВН.
Электрическая схема и принцип работы сумматора описаны, например, в книге Р. Кофлин, Ф. Дрискол "Операционные усилители и линейные интегральные схемы". Мир, 1979 г.
Корректоры 10, 11 предназначены для формирования сигнала, пропорционального погрешности согласования линий визирования первого и второго прицелов соответственно в плоскости ВН и ГН.
В плоскости ВН погрешности обусловлены неточностью передачи в первом 6 и втором 7 механизмах передачи.
В плоскости ГН погрешности обусловлены неточностью выполнения в башне посадочных плоскостей для установки прицелов.
Корректоры 10 и 11 (см. фиг.2) реализованы на операционном усилителе УД 17, включенном по модифицированной схеме дифференциального усилителя, позволяющего регулировкой резистора R1 получать сигнал в пределах от минус Uвх до Uвх.
По сигналам, поступающим с первого 14 и второго 15 датчиков угла, за счет работы соответственно приводов ГН 9 и ВН 8 орудие отслеживает положение линии визирования первого прицела 2.
Углы прицеливания и бокового упреждения орудия относительно линии визирования вводятся путем суммирования сигналов баллистического вычислителя с сигналами первого 14 и второго 15 датчиков угла.
СУО работает следующим образом.
При движении танка по пересеченной местности первый прицел 1 обеспечивает независимую стабилизацию поля зрения и линии прицеливания в вертикальной и горизонтальной плоскостях.
С первого 14 и второго 15 датчиков угла выдаются управляющие сигналы соответственно в привода ГН и ВН.
Привода ВН 8 и ГН 9 автоматически воздействуют на орудие 4 и башню 3. При этом орудие 4 сохраняет заданное положение в пространстве и обеспечивается согласованное положение с линией прицеливания.
Второй прицел 2 обеспечивает стабилизацию поля зрения и линии прицеливания в вертикальной и горизонтальной плоскостях.
Стабилизация линии прицеливания в плоскости ВН осуществляется ДГС 19, управляющим поворотом зеркального отражателя 18 вокруг горизонтальной оси.
Стабилизация линии прицеливания в плоскости ГН осуществляется регулятором 20.
При рассогласовании платформы 17 и линии прицеливания от стабилизируемого направления с МГ, который задает стабилизируемое направление, снимается сигнал и подается в регулятор 20, формирующий закон управления разворотом платформы 17, чтобы устранить рассогласование и сохранить в пространстве положение линии прицеливания.
СУО обеспечивает совмещение и синхронное управление поворотом линий визирования двух прицелов с высокой точностью. При рассогласовании линий визирования второго и первого прицелов в плоскости ВН сигналы со второго 15, третьего 21 датчиков угла и датчика положение 5 подаются на входы сумматора 13.
Одновременно во втором корректоре 11 формируется сигнал, пропорциональный неточности передачи угла первым 6 и вторым 7 механизмами передачи.
При отклонении линии визирования в плоскости ВН с датчика положения 5 снимается сигнал, пропорциональный углу отклонения, и подается на вход второго корректора 11, резистором R1 задается сигнал, пропорциональный неточности передачи угла первым и вторым механизмом передачи.
Второй корректор 11 обеспечивает перемножение двух сигналов и выдачу сигнала на вход сумматора 13.
Таким образом, с выхода сумматора 13 снимается сигнал, пропорциональный угловому рассогласованию линий визирования первого 1 и второго 2 прицелов, и подается на второй вход ДГС 19.
ДГС 19 обеспечивает разворот зеркального отражателя 18 вокруг горизонтальной оси, чтобы устранить угловое рассогласование.
При рассогласовании линий визирования второго 2 и первого 1 прицелов в плоскости ГН сигналы с первого 14 и четвертого 22 датчиков угла подаются на входы сумматора 12, одновременно с выхода первого корректора 10 поступает сигнал, пропорциональный неточности выполнения посадочных плоскостей двух прицелов.
С выхода сумматора 12 снимается сигнал, пропорциональный угловому рассогласованию линий визирования первого 1 и второго 2 прицелов, и подается на первый вход ДГС 19. С выхода ДГС 19 управляющий сигнал подается в регулятор 20. Исполнительный двигатель регулятора разворачивает платформу 17 с зеркальным отражателем 18 вокруг вертикальной оси, чтобы устранить угловое рассогласование.
Источники информации
1. Техническое описание комплекса 1 А45 БЛ1.335.066ТО (документац. АО КЗ г.Красногорск), 1987 г.
2. Техническое описание комплекса ТО 1-КО1 БЛ1.335.055ТО (документац. АО КЗ г.Красногорск), 1985 г.
3. Техническое описание изделия ТО1-ПО2 БЛ1.335.078ТО, (документац. АО КЗ г. Красногорск), 1988 г.
4. Д.С. Пельпор "Гироскопические системы", часть 1, "Высшая школа", 1971 г.
5. Д. С. Пельпор "Динамически настраиваемые гироскопы". Машиностроение, 1988 г.
6. Р. Кофлин, Ф. Дрискол "Операционные усилители и линейные интегральные схемы". Мир, 1979 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ОГНЁМ | 2013 |
|
RU2548376C1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170905C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2218544C2 |
| ТАНК С ЗЕНИТНЫМ ВООРУЖЕНИЕМ | 2002 |
|
RU2231737C1 |
| ТАНК | 2001 |
|
RU2218543C2 |
| КОМПЛЕКС УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ТАНКА | 2002 |
|
RU2226664C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ПОДВИЖНАЯ БОЕВАЯ МАШИНА С КОМПЛЕКСОМ ПРОТИВОДЕЙСТВИЯ УПРАВЛЯЕМОМУ, САМОНАВОДЯЩЕМУСЯ ОРУЖИЮ И АРТИЛЛЕРИЙСКОМУ ОРУЖИЮ С ЛАЗЕРНЫМИ ДАЛЬНОМЕРАМИ | 1998 |
|
RU2151360C1 |
| Система управления огнем боевой машины | 2019 |
|
RU2747229C1 |
Изобретение относится к области бронетанковой техники, в частности к системам управления огнем, обеспечивающим наблюдение поля боя и управление вооружением. Технический результат - обеспечение возможности эффективного использования вооружения танка днем и ночью. Сущность изобретения заключается в том, что для повышения боевых характеристик танка предлагается СУО с дневным и ночным прицелами, имеющими независимую стабилизацию полей зрения в плоскостях вертикального и горизонтального наведения. Схема управления полями зрении прицелов в СУО выполнена таким образом, что постоянно обеспечивается совмещение и синхронное перемещение линий визирования двух прицелов. Таким образом, удалось объединить два автономно работающих прицела в единый прицельный комплекс и одновременно использовать их технические возможности. Погрешность совмещения и синхронного слежения линий визирования двух прицелов в такой СУО не превышает 0,5 угл. мин. во всем диапазоне углов прокачки орудия. Этого удалось достичь за счет введения в схему СУО двух корректоров. Первый позволяет устранить погрешность синхронного слежения, обусловленную неточностью их установки в башне из-за непараллельности посадочных поверхностей. Второй корректор компенсирует погрешность передачи угла от датчика положения орудия и датчика угла плоскости вертикального наведения дневного прицела, обусловленную неточностью работы механизмов передачи угла. 2 ил.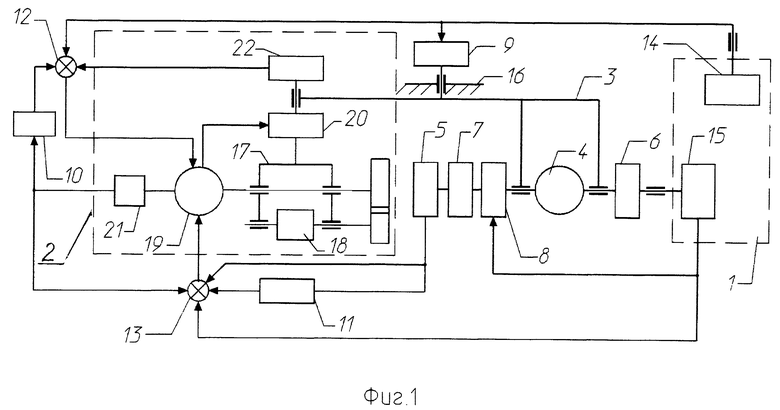
Система управления огнем боевой машины, содержащая установленный в башне машины первый прицел с двухстепенной стабилизацией поля зрения, включающий первый датчик угла, кинематически связанный с горизонтальным зеркалом, а также второй датчик угла, ротор которого связан с вертикальным зеркалом, а статор через первый механизм передачи кинематически связан с осью качания орудия, закрепленного в цапфенных узлах башни, датчик положения, связанный с осью качания орудия вторым механизмом передачи, кинематически связанный с осью качания орудия привод вертикального наведения, вход которого соединен с выходом второго датчика угла, закрепленный в корпусе машины и кинематически связанный с башней привод горизонтального наведения, вход которого соединен с выходом первого датчика угла, установленный в башне второй прицел, включающий зеркальный отражатель с горизонтальной осью, отличающаяся тем, что она снабжена платформой с вертикальной осью, размещенной в подшипниках во втором прицеле, горизонтальная ось зеркального отражателя при этом размещена в подшипниках платформы, двухосным гироскопическим стабилизатором, выходная ось которого размещена в подшипниках платформы и кинематически связана передачей 2: 1 с горизонтальной осью зеркального отражателя, кинематически связанным с вертикальной осью платформы регулятором, вход которого соединен с выходом двухосного гироскопического стабилизатора, третьим и четвертым датчиками угла, кинематически связанными соответственно с горизонтальной осью зеркального отражателя и вертикальной осью платформы, первым корректором, вход которого соединен с выходом третьего датчика угла, вторым корректором, вход которого соединен с датчиком положения, первым сумматором, первый, второй и третий входы которого соединены соответственно с выходом первого корректора, выходом четвертого датчика угла и выходом первого датчика угла, а выход соединен с первым входом двухосного гироскопического стабилизатора, вторым сумматором, первый, второй, третий и четвертый входы которого соединены соответственно с выходом третьего датчика угла, выходом датчика положения, выходом второго корректора и выходом второго датчика угла, а выход соединен со вторым входом двухосного гироскопического стабилизатора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВЫСОКОСКОРОСТНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2133432C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ ТАНКА | 1995 |
|
RU2087830C1 |
| ТРУБКА ДЛЯ БИОМЕДИЦИНЫ ИЗ НЕ СОДЕРЖАЩЕЙ ПВХ СИСТЕМЫ | 2008 |
|
RU2432261C2 |
| DE 3332795 A1, 28.03.1985 | |||
| US 4387624, 14.06.1983. | |||

