Изобретение относится к роторным снегоуборочным агрегатам и может быть использовано на расчистке тротуаров, пешеходных дорожек и дорог от рыхлого снега.
Известен малогабаритный снегоуборочный агрегат, состоящий из шасси, на котором установлены двигатель, кожух, закрывающий двигатель, направляющие щитки, рабочая камера с ротором, установленным на валу двигателя и состоящим из основания в форме круга и лопаток, выгнутых из плоского листового материала, ось вращения ротора параллельна направлению движения агрегата. Линия соприкосновения лопаток и основания, а также режущие кромки лопаток являются отрезками прямых линий [1].
Недостатком известного агрегата является невысокая эффективность захвата и перемещения снега из-за неоптимальных форм режущей кромки лопаток и поверхности лопаток.
Известен снегоуборочный агрегат, состоящий из шасси, на котором установлены двигатель, кожух, закрывающий двигатель, направляющие щитки, цилиндрическая рабочая камера с ротором, установленным на валу двигателя и состоящим из основания в форме круга и лопаток, установленных с наклоном по отношению к основанию ротора так, чтобы угол между лопаткой и основанием в направлении вращения ротора был меньше 90°, режущая часть внутренней кромки лопатки имеет форму спирали. Линия соприкосновения лопаток и основания может быть или прямой линией или кривой линией, имеющей вогнутую форму в направлении вращения ротора [2], [3].
Недостатками известного рабочего органа является недостаточная прочность лопаток вследствие их значительной длины в направлении вращения при консольном закреплении и невысокая эффективность перемещения снега за пределы агрегата вследствие неоптимальной формы поверхности тех участков лопаток, которые прилегают к основанию, и выполняют это перемещение.
Целью изобретения является обеспечение высокой производительности перемещения снега при низкой стоимости и трудоемкости изготовления агрегата.
Указанная цель достигается тем, что в малогабаритном снегоуборочном агрегате, состоящем из шасси, на котором установлены двигатель, имеющий органы управления им, кожух, закрывающий двигатель, цилиндрическая рабочая камера с выходным отверстием и направляющими щитками, причем ротор установлен внутри рабочей камеры на валу двигателя и состоит из дискового основания, перпендикулярного оси вращения вала двигателя, и равномерно закрепленных на нем лопаток, лопатки выгнуты из плоского листового материала и закреплены на дисковом основании и по линии сопряжения лопатки с дисковым основанием, имеющей форму выпуклого в направлении вращения ротора участка логарифмической спирали, лопатки установлены с наклоном к дисковому основанию так, что угол между лопаткой и дисковым основанием в направлении вращения ротора меньше 90°, режущая кромка каждой лопатки имеет форму участка логарифмической спирали, выпуклого в направлении вращения ротора.
Две соседние лопатки могут быть выполнены в виде одной детали, объединяющей две соседние лопатки и участок-вставку между ними.
Малогабаритный снегоуборочный агрегат может быть снабжен ручками для перемещения агрегата во время работы и для его переноски.
Органы управления двигателем могут быть установлены на ручке для перемещения агрегата во время работы.
Лопатки могут иметь небольшую длину в направлении оси вращения ротора.
На фиг.1 показан вид спереди малогабаритного снегоуборочного агрегата.
На фиг.2 показан вид сверху малогабаритного снегоуборочного агрегата.
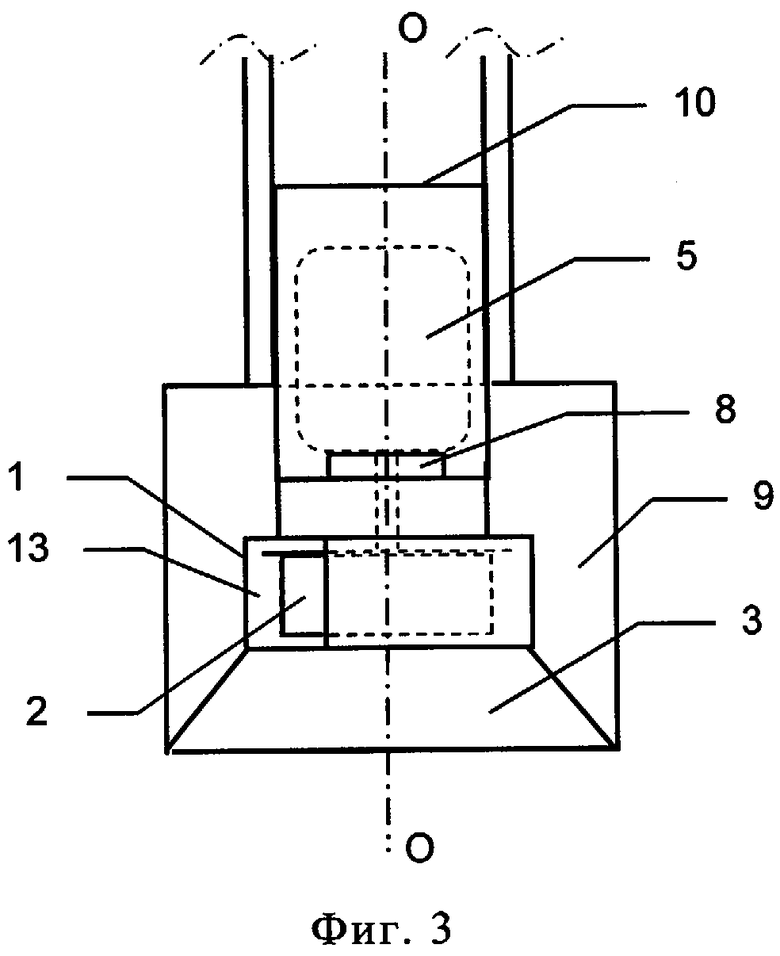
На фиг.3 показан вид сбоку малогабаритного снегоуборочного агрегата.
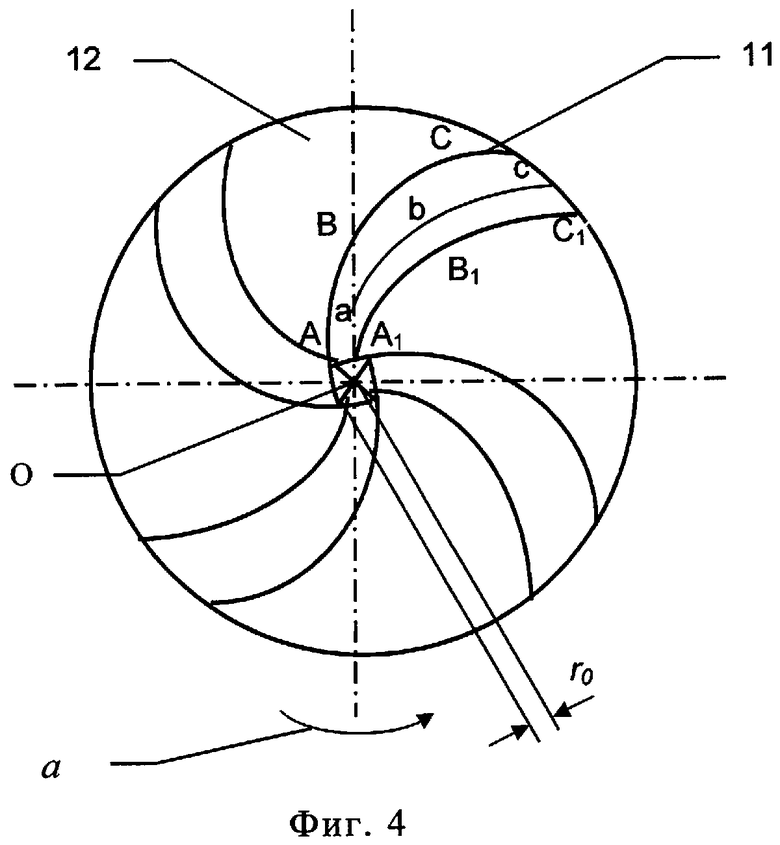
На фиг.4 показан вид ротора спереди.
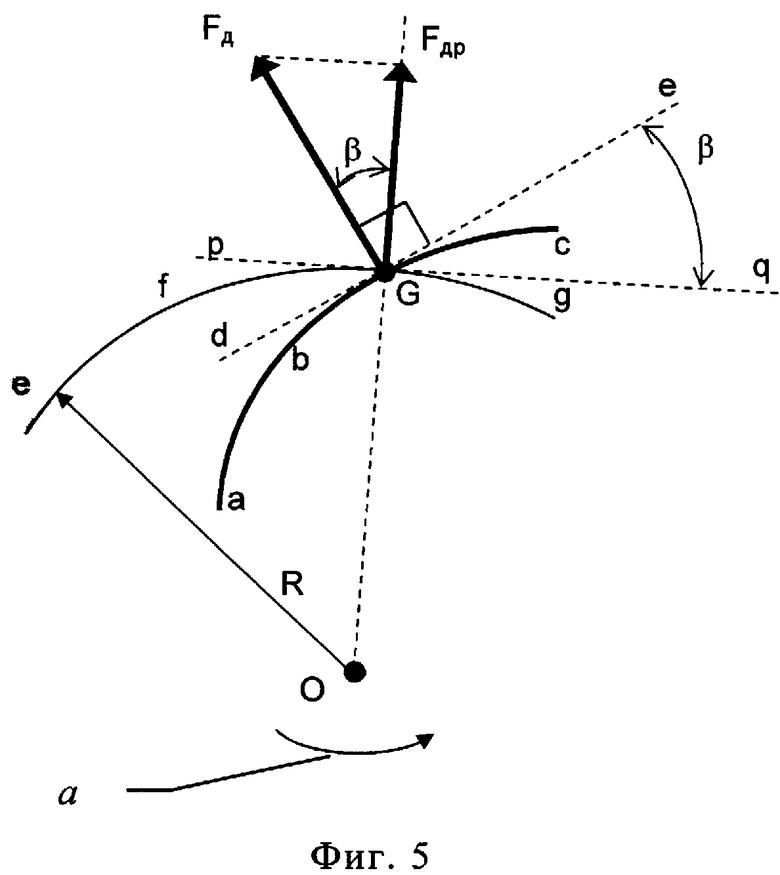
На фиг.5 поясняется форма поверхности лопатки и показаны силы, действующие на частицу снега, скользящую по поверхности лопатки.
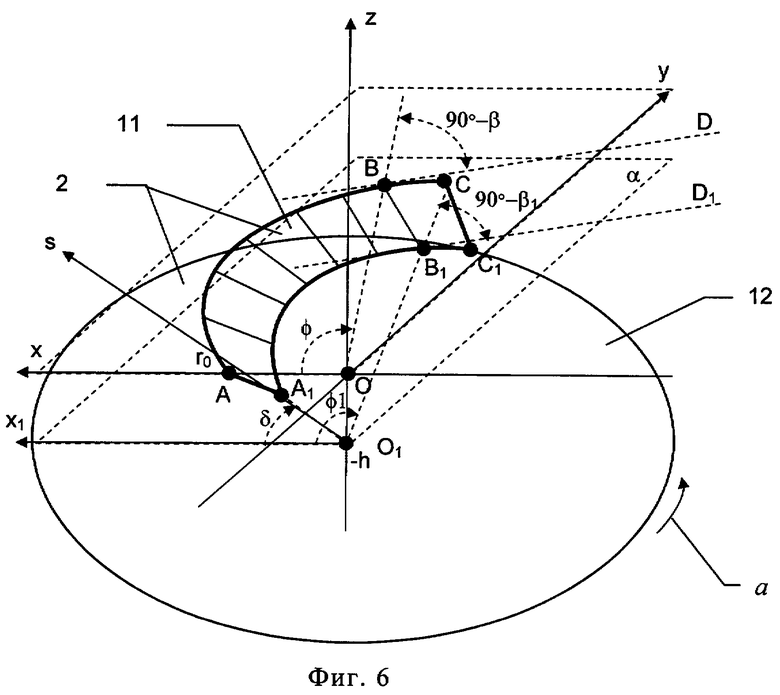
На фиг.6 показано построение поверхности лопатки, разворачивающейся на плоскость.
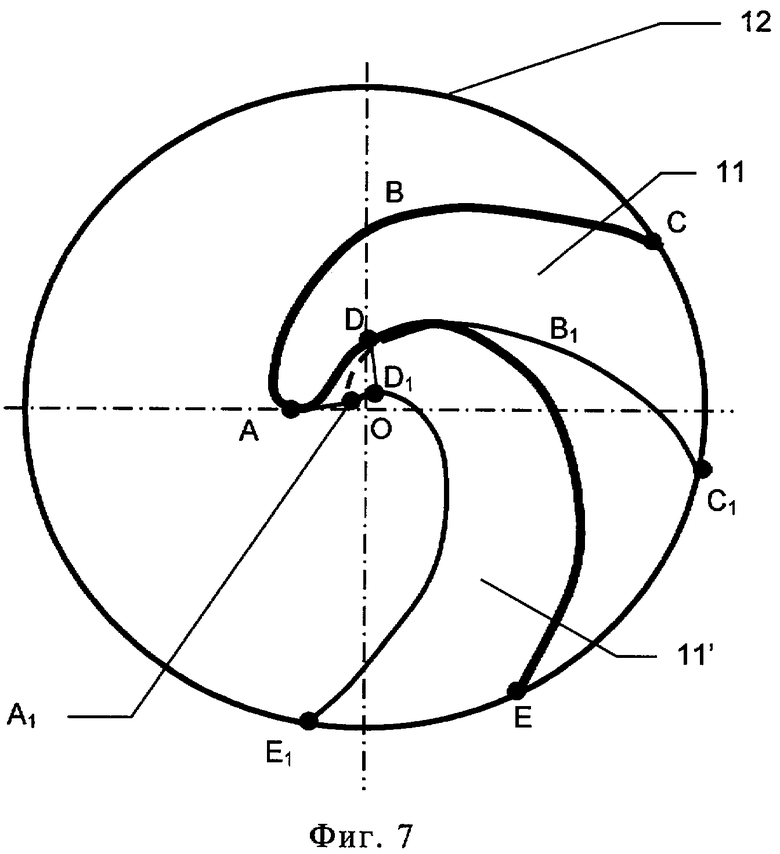
На фиг.7 показана проекция на основание ротора двух лопаток, изготовленных из одного плоского листа.
Малогабаритный снегоуборочный агрегат состоит из шасси 9, на котором установлены двигатель 5, кожух 10, закрывающий двигатель 5, цилиндрическая рабочая камера 1 с ротором 2, входным отверстием 15 и выходным отверстием 13, направляющие щитки 3. Ротор установлен на валу двигателя 4. Ручки 6 используются для перемещения агрегата во время работы. Ручка 8 используется для переноски агрегата. Органы управления 7 используется для пуска и остановки двигателя 5. В качестве двигателя 5 может быть использован или двигатель внутреннего сгорания или электродвигатель, получающий питание от электросети по кабелю. Ротор 2 состоит из дискового основания 12, перпендикулярного оси вращения вала и лопаток 11. Лопатки 11 выгибаются из плоского листового материала. Лопатки 11 устанавливаются с наклоном по отношению к дисковому основанию 12 так, чтобы угол между лопаткой 11 и дисковым основанием 12 в направлении вращения ротора 2 был меньше 90°. На фиг.4 режущая кромка лопатки 11 показана в виде кривой АВС. Линия сопряжения лопатки 11 и дискового основания 12 показана в виде кривой A1B1C1. Кривая abc получена пересечением лопатки и плоскости, перпендикулярной оси вращения ротора. На фиг.4 и 5 точка О является точкой пересечения оси вращения ротора и дискового основания ротора 12. На фиг.5 часть траектории движения точки G, принадлежащей поверхности лопатки 11, показана в виде дуги efg окружности с радиусом R. Угол β наклона кривой abc в точке G есть угол между касательной de к кривой abc в точке G и касательной pq к дуге efg в точке G. Если кривая abc - участок логарифмической спирали, то для любой ее точки угол наклона одинаков. На фиг.5 сила Fд - составляющая силы давления поверхности лопатки на частицу снега в точке G в плоскости, перпендикулярной оси вращения ротора 2, перпендикулярна касательной de к кривой abc в точке G. Сила Fдр - составляющая силы Fд в радиальном направлении. Угол между силами Fд и Fдр равен углу наклона кривой abc в точке G, т.е. равен β.
На фиг.6 показано построение поверхности лопатки, разворачивающейся на плоскость. Oz - ось вращения ротора 2. xOy - плоскость, перпендикулярная оси Oz вращения ротора 2. О - точка пересечения оси Oz вращения ротора 2 с плоскостью хОу. В плоскости хОу введена система полярных координат, причем полюс этой системы координат совпадает с точкой О, а полярная ось совпадает с положительной полуосью оси Ох, направленной влево. В качестве положительного направления поворота радиуса-вектора, задающего положение точки в указанной полярной системе координат, принято направление вращения по часовой стрелке.
Режущая кромка ABC лопатки 11 лежит в плоскости хОу. Режущая кромка ABC лопатки 11 имеет форму выпуклого в направлении вращения ротора участка логарифмической спирали, заданной в полярных координатах плоскости хОу выражением (1).

где r0 - расстояние начальной точки А режущей кромки ABC лопатки 11 от оси Oz вращения ротора 2,
φ - полярный угол, определяющий направление радиуса-вектора ОВ, конец которого задает положение точки В режущей кромки АВС лопатки 11,
ρ - длина радиуса-вектора ОВ точки В режущей кромки АВС лопатки 11, соответствующей полярному углу φ,
βr - угол резанья снега режущей кромкой АВС лопатки 11, равный углу наклона режущей кромкой АВС,
е - основание натуральных логарифмов,
φ2 - полярный угол, соответствующий конечной точке С режущей кромки АВС лопатки 11.
Плоскость α, перпендикулярная оси Oz вращения ротора 2. Плоскость α пересекает ось Oz вращения ротора 2 в точке O1 на расстоянии - h от точки О, где h - высота лопатки. В плоскости α введена система полярных координат, причем полюс этой системы координат совпадает с точкой O1, a полярная ось O1s повернута на угол δ>0 относительно оси O1x1, параллельной оси Ох. В качестве положительного направления поворота радиуса-вектора, задающего положение точки в указанной полярной системе координат, принято направление вращения по часовой стрелке.
Линия A1B1C1 сопряжения лопатки 11 и дискового основания 12 лежит в плоскости α. Линия A1B1C1 сопряжения лопатки 11 и дискового основания 12 имеет форму выпуклого в направлении вращения ротора участка логарифмической спирали, заданной в полярных координатах плоскости α выражением (2).

где r01 - расстояние начальной точки A1 линии A1B1C1 сопряжения лопатки 11 и дискового основания 12 от оси Oz вращения ротора 2,
φ1 - полярный угол, определяющий направление радиуса-вектора O1B1, конец которого задает положение точки B1 линии A1B1C1 сопряжения лопатки 11 и дискового основания 12,
ρ1 - длина радиуса-вектора O1B1 точки B1 линии A1B1C1 сопряжения лопатки 11 и дискового основания 12, соответствующей полярному углу φ1,
φ12 - полярный угол, соответствующий конечной точке C1 линии сопряжения лопатки 11 и дискового основания 12.
Подбор величин δ, r0 и r01 обеспечивает наклон лопатки 11 относительно основания ротора 12 на угол меньше 90°. Уменьшение r01 обеспечивает увеличение наклона при постоянных h, δ и r0.
Линии АВС и A1B1C1 используются в качестве направляющих линий при построении поверхности лопатки. Когда φ изменяется от 0 до φ2, то точка В перемещается по кривой АВС от точки А к точке С. Аналогично, при изменении φ1 от 0 до φ12 точка B1 перемещается по кривой A1B1C1 от точки A1 к точке C1. Поверхность лопатки образуется при движении отрезка прямой BB1, когда φ и φ1 изменяется от 0 до φ2 и текущие значения φ1 равны φ. При равенстве текущих значений φ1 и φ обеспечивается параллельность касательных BD и B1D1. А это обеспечивает то, что поверхность лопатки, построенная указанным способом, может быть развернута на плоскость. Параметры, определяющие форму лопатки: r0, r01, h, β, δ. При φ1, не равном φ12, часть теоретически построенной лопатки, выступающая за габариты рабочей камеры 1, должна быть удалена.
Направляющие щитки 3 - участки конической поверхности. Ось этого конуса совпадает с осью OO1 на фиг.2. Направляющий щиток 14 делается съемным для обеспечения возможности монтажа ротора.
Грань AA1 лопатки (см. фиг.6) можно продлить до соединения с аналогичной гранью одной из соседних лопаток участком-вставкой поверхности, разворачивающимся на плоскость. Тогда две соседние лопатки можно изготавливать из плоского листового материала как одну деталь. Участок-вставку можно построить аналогично построению поверхности лопатки. В качестве направляющих линий при построении участка-вставки можно использовать кубические параметрические кривые в форме Фергюсона [4]. На фиг.7 показана проекция двух лопаток 11 и 11' на дисковое основание 12 ротора, соединенных участком-вставкой. CBAA1B1C1 - лопатка 11'. EDD1E1 - лопатка 11'. AA1D1D - участок-вставка. Кривые СВА и DE - режущие кромки лопаток 11 и 11' соответственно. Кривые C1B1A1 и D1E1 - линии сопряжения с основанием ротора 12 лопаток 11 и 11' соответственно. При изготовлении каждой заготовки лопатки в виде одной детали, объединяющей две соседние лопатки и участок-вставку, появляется возможность использовать для изготовления лопаток более тонкий листовой материал, т.к. в этом случае каждая лопатка собирается из двух заготовок.
Снегоуборочный агрегат работает следующим образом. Меньший чем 90° и постоянный по величине угол резанья снега режущей кромкой лопаток 11 и наклон лопаток относительно основания 12 на угол меньше 90° обеспечивают эффективный захват снега лопатками 11. Наклон лопаток 11 относительно основания 12 на угол меньше 90° в направлении вращения ротора обеспечивает эффективное перемещение снега в направлении основания ротора 12. Меньший чем 90° угол наклона кривой, полученной пересечением поверхности лопатки и плоскости, перпендикулярной оси вращения ротора на поверхности каждой лопатки 11, обеспечивает эффективное перемещение снега в радиальном направлении от оси вращения ротора OO1 и перемещение снега на значительное расстояние через выходное отверстие 13 рабочей камеры 1 за счет наличия составляющей Fдр силы давления Fд. Т.к. верхняя часть ротора прикрыта вертикальными стенками рабочей камеры, разброс снега при вращении ротора минимален.
Преимущества заявленной конструкции:
- изгиб лопаток в форме, близкой к форме логарифмической спирали, обеспечивает повышенную производительность снегоуборочного агрегата за счет эффективного резанья и перемещения снега,
- форма лопаток полностью определяется формой линии соприкосновения лопаток и дискового основания ротора,
- установка лопаток под углом меньше 90° к дисковому основанию обеспечивает интенсивный захват снега и подачу его в рабочую камеру,
- изготовление лопаток ротора из листового материала обеспечивает низкую стоимость ротора,
- ротор устанавливается непосредственно на вал двигателя, т.е. отпадает необходимость в использовании передаточного механизма, повышающего сложность изделия и увеличивающего потери энергии.
Источники информации
1. US 4150501 A (MORE CORP.), 24.04.1979.
2. US 2785482 A (CROCE et al.), 19.03.1957.
3. SU 956691 А (ЦНИПКТИ), 07.09.1982.
4. Фоке А., Пратт М. Вычислительная геометрия. Москва, «Мир», 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СНЕГОУБОРОЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2418129C1 |
| ОРУДИЕ ДЛЯ ИЗВЛЕЧЕНИЯ КОРНЕВОЙ МАССЫ РАСТЕНИЙ | 1999 |
|
RU2180164C2 |
| ДИСКОВЫЙ КУЛЬТИВАТОР | 2017 |
|
RU2661380C2 |
| ПЛАСТИНЫ РАФИНЕРА С НОЖАМИ В ФОРМЕ ЛОГАРИФМИЧЕСКОЙ СПИРАЛИ | 2003 |
|
RU2304022C2 |
| Рабочий орган снегоочистителя | 1980 |
|
SU956691A1 |
| РАБОЧИЙ ОРГАН РОТОРНОГО СНЕГООЧИСТИТЕЛЯ | 1993 |
|
RU2089703C1 |
| РАЗМАЛЫВАЮЩИЙ КОНУС, СЕГМЕНТ ПЛАСТИНЫ ДЛЯ КОНУСА ВРАЩАТЕЛЬНОГО РАФИНЕРА, КОНИЧЕСКИЙ РАФИНЕР, А ТАКЖЕ СПОСОБ ИЗГОТОВЛЕНИЯ НАБОРА ПРОТИВОЛЕЖАЩИХ ПЛАСТИН ДЛЯ КОНИЧЕСКОГО РАФИНЕРА | 2006 |
|
RU2390379C2 |
| РОТОРНО-ВОЛНОВОЙ ДВИГАТЕЛЬ | 2010 |
|
RU2482299C2 |
| РАБОЧИЙ ОРГАН РОТОРНОГО СНЕГООЧИСТИТЕЛЯ | 1993 |
|
RU2068044C1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ СНЕЖНО-ЛЕДЯНОГО НАКАТА С ДОРОЖНЫХ ПОКРЫТИЙ | 2017 |
|
RU2649342C1 |

Изобретение относится к роторным снегоуборочным агрегатам. Снегоуборочный агрегат состоит из шасси, на котором установлены двигатель, кожух, закрывающий двигатель, цилиндрическая рабочая камера с ротором и выходным отверстием, направляющие щитки, органы управления двигателем. Ротор установлен на валу двигателя и состоит из дискового основания, перпендикулярного оси вращения вала двигателя, и лопаток. Лопатки выгнуты из плоского листового материала. Линия пересечения каждой лопатки с любой плоскостью, перпендикулярной оси вращения ротора, близка к форме участка логарифмической спирали выпуклого в направлении вращения ротора. Лопатки установлены с наклоном по отношению к дисковому основанию так, чтобы угол между лопаткой и дисковым основанием в направлении вращения ротора был меньше 90° и прикреплены к дисковому основанию по линии сопряжения, имеющей форму участка логарифмической спирали, выпуклого в сторону вращения ротора. Режущая кромка каждой лопатки имеет форму участка логарифмической спирали, выпуклого в сторону вращения ротора. Обеспечивается высокая производительность перемещения снега при низкой стоимости и трудоемкости изготовления агрегата. 3 з.п. ф-лы, 7 ил.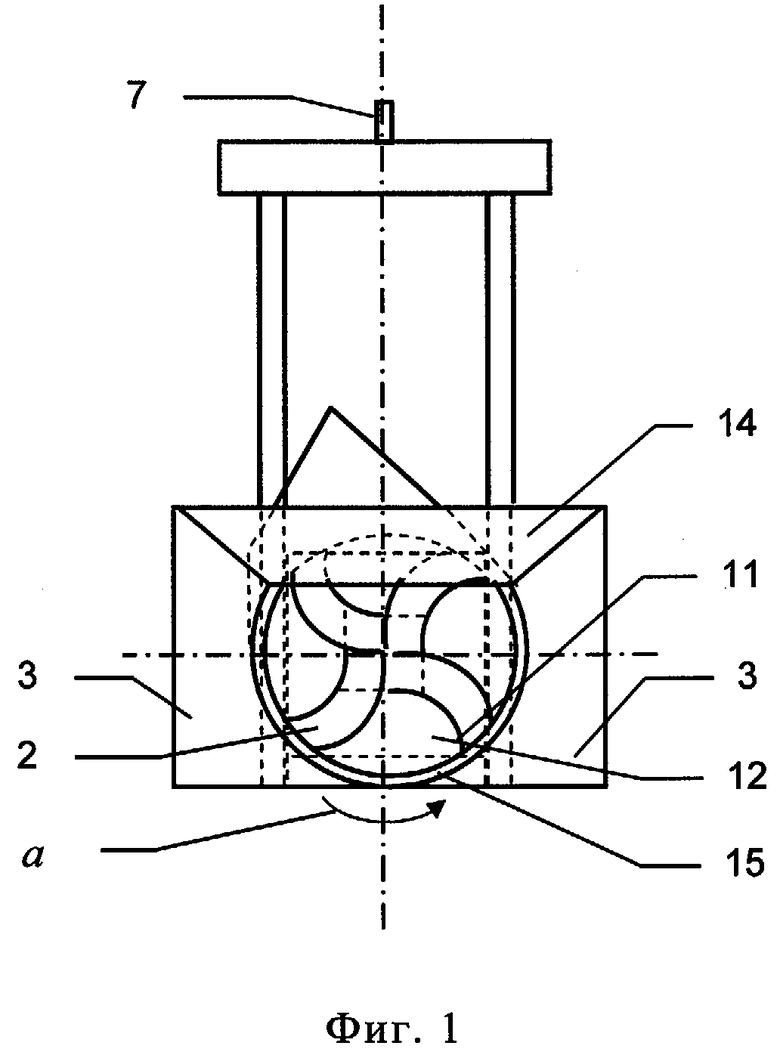
| Рабочий орган снегоочистителя | 1980 |
|
SU956691A1 |
| Способ количественного определения гидроперекиси изопропилбензола | 1983 |
|
SU1105812A1 |
| РЕГЕНЕРИРУЮЩЕЕ СРЕДСТВО ПО УХОДУ ЗА НОГТЯМИ И ОКОЛОНОГТЕВОЙ КОЖЕЙ РУК И НОГ В ВИДЕ МАСЛА | 2021 |
|
RU2785482C1 |
| Система стальных сборно-разборных трубопроводов | 2021 |
|
RU2794271C1 |

