Изобретение относится к области радиолокации и может быть использовано в системах поиска, слежения и многоцелевого сопровождения воздушных объектов.
Известно устройство обработки радиолокационных сигналов, входящее в состав «Устройства определения высоты», описанное в патенте №2119976 1998 г., бюл. 26, автор Часовской А.А. В нем используется приемник и узлы обработки, обеспечивающие определения дальности и угловых координат при увеличенной частоте излучения зондирующих импульсов. Однако из-за увеличения времени анализа информации уменьшается время определения дальности и направления при наличии многих целей.
Известно устройство обработки радиолокационных сигналов, входящее в состав «Устройства определения высоты», описанное в патенте №2168739, бюл. №16 от 10.06.2001 г. В нем формирователь импульсов формирует импульсы то с одной, то с другой длительностью в блок управления сканированием при попеременном перемещении луча с разными скоростями и на вход преобразователя угловых величин в код. Сканирование луча осуществляется то с одной, то с другой увеличенной частотой следования зондирующих импульсов, излучаемых на одних и тех же направлениях. С приемника выделенные сигналы поступают в преобразователь амплитуды в код и в преобразователь углового рассогласования в код. Этот код поступает на запись в оперативное запоминающее устройство по адресу с преобразователя амплитуды в код. Команды, разрешающие запись и считывание угловых значений сигналов с равной амплитудой, поступают с блока управления сканированием при попеременном перемещении луча с разными скоростями. При этом скорость изменения угловых величин в преобразователе углового рассогласования в код также попеременно меняется синхронно с изменением скорости перемещенного луча. Дальность определяется как разность угловых величин перемещений луча в моменты приема отраженных сигналов и максимальная величина этой разности зависит от максимальной дальности обнаружения и не превышает строго определенной величины. В вычитателе с контролируемой разностью определяется разность запомненного и текущего углового рассогласования сигналов, имеющих одинаковую амплитуду и находящихся в угловом промежутке, не превышающем определенную величину. Разность с выхода вычитателя с контролируемой разностью, характеризующая дальность, поступает в постоянное запоминающее устройство, где для каждой разности защита, соответствующая угловая величина между положением луча в моменты излучения импульса и положением луча в моменты приема отраженных сигналов при сканировании с меньшей скоростью. Эта угловая величина увеличивается с увеличением дальности. Она поступает в вычитатель, где происходит определение направления на объект путем вычитания угловой величины из оперативного запоминающего устройства, угловой величины с постоянного запоминающего устройства. Разность представляет угловое направление на объект. Однако из-за необходимости остановок луча в конце сканирования на время максимального запаздывания отраженного сигнала время определения дальности и угловых координат не всегда удовлетворяет предъявляемым требованиям. С помощью предлагаемого устройства уменьшается время определения дальности и направления.
Достигается это введением второго постоянного запоминающего устройства, второго оперативного запоминающего устройства, второго вычитателя с контролируемой разностью, блока элементов совпадения и двух блоков элементов ИЛИ, при этом выход преобразователя углового рассогласования в код соединен с первым входом второго постоянного запоминающего устройства, имеющего второй, третий входы и выход, соответственно соединенные с первым, вторым выходом блока управления сканированием при попеременном перемещении луча с разными скоростями и с первым входом второго оперативного запоминающего устройства, соединенным также с первым входом второго вычитателя с контролируемой разностью, второй вход и выход которого соответственно соединены с выходом второго оперативного запоминающего устройства и с первым входом первого блока элементов ИЛИ, имеющего второй вход, соединенный с выходом вычитателя с контролируемой разностью, и имеющим выход, соединенный с входом постоянного запоминающего устройства, а вышеупомянутый выход второго оперативного запоминающего устройства соединен с первым входом блока элементов совпадения, второй вход которого и выход соответственно соединены с вышеупомянутым третьим входом второго постоянного запоминающего устройства и с первым входом второго блока элементов ИЛИ, второй вход и выход которого соответственно соединены с выходом оперативного запоминающего устройства и со вторым входом вычитателя.
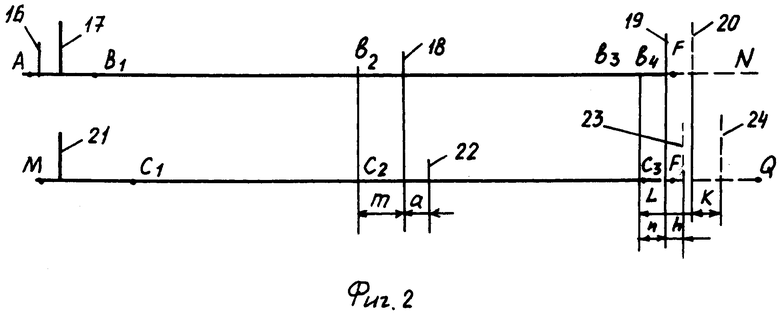
На фиг.1 и в тексте приняты следующие обозначения.
1 - блок управления сканированием при попеременном перемещении луча с разными скоростями;
2 - формирователь импульсов;
3 - приемник;
4 - преобразователь амплитуды в код;
5 - преобразователь углового рассогласования в код;
6 - постоянное запоминающее устройство;
7 - оперативное запоминающее устройство;
8 - вычитатель с контролируемой разностью;
9 - блок элементов совпадения;
10 - оперативное запоминающее устройство;
11 - вычитатель с контролируемой разностью;
12 - блок элемента ИЛИ;
13 - постоянное запоминающее устройство;
14 - вычитатель;
15 - блок элементов ИЛИ,
при этом вход и первый и второй выходы блока управления сканированием при попеременном перемещении луча с разными скоростями 1 соответственно соединены: с выходом формирователя импульсов 2, соединенным также с первым входом преобразователя углового рассогласования в код 5, с первым и вторым входами оперативного запоминающего устройства, а третий и четвертый входы и выход которого соответственно соединены: через преобразователь амплитуды в код 4 с выходом приемника 3, с выходом преобразователя углового рассогласования в код 5, с вторым входом вычитателя с контролируемой разностью 11, имеющего первый вход, соединенный с выходом преобразователя углового рассогласования в код 5, второй вход которого соединен с выходом приемника 3, а выход постоянного запоминающего устройства 13 соединен с первым входом вычитателя 14, второй вход которого соединен с выходом блока элементов ИЛИ 15, второй и первый входы которого соответственно соединен с выходом оперативного запоминающего устройства 10 и с выходом блока элементов совпадения 9, первый и второй входы которого соответственно соединены с выходом оперативного запоминающего устройства 7, с вторым входом вычитателя с контролируемой разностью 8 и с третьим входом постоянного запоминающего устройства 6, вторым выходом блока управления сканированием при попеременном перемещении луча с разными скоростями 1, первый выход которого соединен со вторым входом постоянного запоминающего устройства 6, имеющего первый вход и выход соответственно соединенные с выходом преобразователя углового рассогласования в код 5 и с первым входом оперативного запоминающего устройства 7, а выход вычитателя с контролируемой разностью 8 соединен с первым входом блока элементов ИЛИ 12, второй вход и выход которого соответственно соединены с выходом вычитателя с контролируемой разностью 11 и с входом постоянного запоминающего устройства 13.
Устройство работает следующим образом.
Формирователь импульсов 2 формирует импульсы для запуска блока управления сканированием при попеременном перемещении луча с разными скоростями 1. Сканирование луча осуществляется то с одной, то с другой увеличенной в несколько и более раз частотой следования зондирующих импульсов, излучаемых на одних и тех же направлениях независимо от скорости сканирования. Например, при использовании фазированной антенной решетки после каждого скачка луча излучается один зондирующий импульс. Следующие друг за другом перемещения луча осуществляются без остановок в конце сканирования, в отличие от главного аналога. С приемника 3 выделенные сигналы поступают в преобразователь амплитуды в код 4 и в преобразователь углового рассогласования в код 5, с выхода которого код поступает на запись в оперативное запоминающее устройство 10, по адресу с преобразователя амплитуды в код. Команды на запись и считывание угловых значений сигналов с равными амплитудами поступают с блока управления сканированием при попеременном перемещении луча с разными скоростями 1. При этом скорость изменения угловых величин в преобразователе 5 также попеременно меняется синхронно с изменением скорости перемещения луча. Преобразователь углового рассогласования в код 5 работает аналогично преобразователю дальности, представленному, например, в книге Васин В.В., Степанов Б.Н. «Справочник - задачник по радиолокации» М., 1977, с.214, фиг.9.7, в котором в зависимости от длительности строба (в нашем устройстве он поступает с формирователя импульсов 2) меняется скорость счета, а следовательно, и скорость изменения угловых величин, так как сканирование в период одного обзора осуществляется равномерно. Дальность определяется как разность угловых величин перемещения луча в моменты приема отраженных сигналов. Пример конкретного исполнения блока управления сканирования при попеременном перемещении луча с разными скоростями, который может работать по любой заданной программе, представлен, например, в патенте автора №2002277. Разность угловых величин, характеризующая дальность, зависит от максимальной дальности обнаружения и отличия скоростей сканирования и не превышает строго определенной величины. В вычитателе с контролируемой разностью 11 определяется разность запомненного и текущего углового рассогласования сигналов, имеющих одинаковую амплитуду и находящихся в угловом промежутке, непревышающем определенную величину. При облучении объекта несколькими импульсами в процессе обзора амплитуды с выхода приемника 3 отличаются, что обеспечивает однозначное определение дальности. Однако при ускоренном обзоре объект облучается одиночным импульсом. Например, после скачкообразного перемещения луча на величину собственной ширины поле зрения приемника 3 должно обеспечить выделение объекта. Пример конкретного исполнения вычитателя с контролируемой разностью представлен, например, в книге И.А.Орлов и В.Ф.Корнюшко «Основы вычислительной техники и организации вычислительных работ» М.: Энергоатомиздат, 1984, с.139, рис.54. Разность с выхода вычитателя с контролируемой разностью 11, характеризующая дальность, поступает в постоянное запоминающее устройство 13 через блок элементов ИЛИ 12. При этом для каждой разности защита, соответствующая угловая величина между положением луча в моменты излучения импульса и положением луча в моменты приема отражательных сигналов при сканировании с меньшей скоростью. Эта угловая величина увеличивается с увеличением дальности. Она поступает в вычитатель 14, где происходит определение направления на объект путем вычитания поступающей через блок элементов ИЛИ 15 угловой величины из оперативного запоминающего устройства 10 и угловой величины с постоянного запоминающего устройства 13. Однако если излучение зондирующего импульса произошло в конце перемещения луча, а прием отраженного сигнала осуществлен в начале следующего перемещения луча с другой скоростью, то для определения дальности и направления используются дополнительные узлы, отсутствующие в Главном аналоге. Для пояснения воспользуемся фиг.2, где показаны два вектора угловых перемещений луча, соответственно при меньшей и большей скорости сканирования. Пусть первый объект находится на угловом направлении в2, с2, отличающемся от углового направления двух других объектов в4, с3, находящихся на разных дальностях, но на одном направлении. Моменты приема отраженных сигналов 18, 22 от первого объекта имеют угловое рассогласование «а», характеризующее дальность. Так как отсутствуют остановки луча в конце сканирования, то прием отраженных сигналов от второго объекта 17, 21 осуществляется в период последующих перемещений луча уже с другими скоростями, а прием отраженных сигналов третьего объекта 16, 19 осуществляется в периоды перемещения луча с меньшей скоростью, между которыми находится период перемещения луча с большей скоростью. Угловое рассогласование и дальность второго и третьего объекта определяется с помощью постоянного запоминающего устройства 6, оперативного запоминающего устройства 7, вычитателя с контролируемой разностью 8, блока элементов совпадения 9 и двух блоков элементов ИЛИ 12 и 15. В постоянное запоминающее устройство 6 поступает информация об угловых рассогласованиях с преобразователя углового рассогласования в код 5, вместе то с одним, то с другим сигналами с блока управления сканированием при попеременном перемещении луча с разными скоростями 1. При этом при поступлении угловых рассогласований, находящихся внутри участка Ав1 вместе с первым сигналом с блока 1, с постоянного запоминающего устройства 6 считываются соответствующие угловые рассогласования мнимого участка EQ, а при поступлении угловых рассогласований участка МС1, вместе со вторым сигналом с блока 1, будут считываться соответствующие угловые рассогласования мнимого участка FN. Участки Ав, Mc, EQ, FN, в3F представляют из себя величины угловых перемещений за время максимального запаздывания отраженного сигнала, равного времени остановок луча, имевших место в Главном аналоге. Поэтому для второго объекта амплитудам 17, 21 будут соответствовать мнимые амплитуды 20 и 24 с разностью угловых рассогласований К, характеризующей дальность. Кроме того, при поступлении в постоянное запоминающее устройство угловых рассогласований участка в3F они считываются без изменения угловых значений. Поэтому для третьего объекта амплитуде 16 соответствует амплитуда 23, а разность угловых рассогласований h между амплитудой 19 и мнимой амплитудой 23 характеризует дальность. Информация с выхода постоянного запоминающего устройства 6 поступает на запись в оперативное запоминающее устройство 7, работающее в режиме «считывание - запись» по адресу, соответствующему амплитуде с преобразователя амплитуды в код 4, которая одновременно является признаком «считывания - записи». В результате в вычитателе с контролируемой разностью 8 на основании информации с постоянного запоминающего устройства 6 и оперативного запоминающего устройства 7 определяется абсолютное значение разности, не превышающее строго определенной величины, характеризующее дальность до объекта, которая поступает через блок элементов ИЛИ 12 в постоянное запоминающее устройство 13, с выхода которого соответствующие угловые значения от трех объектов m, L и n (см. фиг.2) поступают в вычитатель 14, где определяется направление на объекты вышеизложенным методом при одновременном наличии на его входах информации. В частности, на другой вход вычитателя 14 с оперативного запоминающего устройства 7 поступает информация через блок элементов при поступлении на него сигнала с блока управления сканированием при попеременном перемещении луча 1, в период перемещения этого луча с меньшей скоростью и через блок элементов ИЛИ 15. В частности, на фиг.2 направление на первый объект соответствует точкам в2, с2, а на второй и третий объекты - точкам в4, с3, так как уже отмечалось - эти объекты находятся на одном направлении, но на разных дальностях.
Предлагаемое устройство может быть использовано в радиолокаторах слежения кругового и секторного обзора, а также в устройствах определения высоты. Отсутствие остановок в конце сканирования создает возможность использовать устройство не только в радиолокаторах с электрическим сканированием, но и механическим вращением антенн. При этом частоты облучений могут быть увеличены в десять и более раз при уменьшенном значении их отличий. Возможен режим с увеличенным количеством отраженных сигналов в одной пачке, имеющих разную амплитуду внутри огибающей.
Устройство может быть использовано в оптических локаторах. Точность определения дальности можно увеличить, используя патенты №№2186406 и 2195686.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1999 |
|
RU2168739C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1996 |
|
RU2119176C1 |
| РАДИОЛОКАТОР | 1999 |
|
RU2161807C2 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2000 |
|
RU2193216C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2010 |
|
RU2421749C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2390037C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2334248C1 |
Изобретение относится к области радиотехники. Технический результат заключается в уменьшении времени определения дальности и направления. Сущность изобретения заключается в том, что устройство содержит блок управления сканированием при переменном перемещении луча, формирователь импульсов, приемник, преобразователь амплитуды в код, преобразователь углового рассогласования в код, два постоянных запоминающих устройств (ЗУ), два оперативных ЗУ, два вычитателя с контролируемой разностью, блок элементов совпадения, два блока элементов ИЛИ и вычитатель. 1 ил.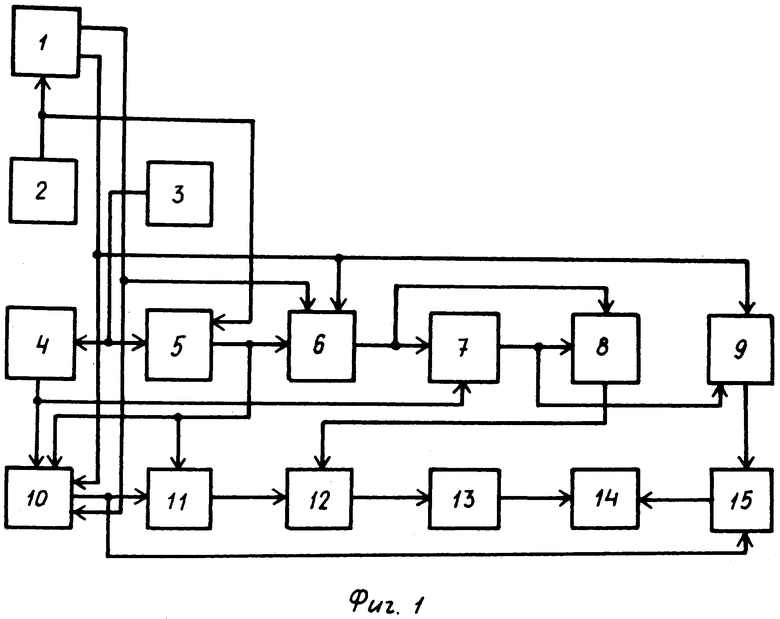
Устройство обработки радиолокационных сигналов, состоящее из блока управления сканированием при попеременном перемещении луча с разными скоростями, формирователя импульсов, преобразователя амплитуды в код, преобразователя углового рассогласования в код, постоянного запоминающего устройства, оперативного запоминающего устройства, вычитателя с контролируемой разностью, вычитателя и приемника, где вход и первый и второй выходы блока управления сканированием при попеременном перемещении луча с разными скоростями соответственно соединены с выходом формирователя импульсов, соединенных также с первым входом преобразователя углового рассогласования в код, с первым и вторым входами оперативного запоминающего устройства, третий, четвертый входы и выход которого соответственно соединены через преобразователь амплитуды в код с выходом приемника, с выходом преобразователя углового рассогласования в код, и с вторым входом вычитателя с контролируемой разностью, имеющего первый вход, соединенный с выходом преобразователя углового рассогласования в код, второй вход которого соединен с выходом приемника, а выход постоянного запоминающего устройства соединен с первым входом вычитателя, отличающееся тем, что вводятся: второе постоянное запоминающее устройство, второе оперативное запоминающее устройство, второй вычитатель с контролируемой разностью, блок элементов совпадения и два блока элементов ИЛИ, при этом выход преобразователя углового рассогласования в код соединен с первым входом второго постоянного запоминающего устройства, имеющего второй, третий входы и выход, соответственно соединенные с первым, вторым выходом блока управления сканированием при попеременном перемещении луча с разными скоростями и с первым входом второго оперативного запоминающего устройства, соединенным также с первым входом второго вычитателя с контролируемой разностью, второй вход и выход которого соответственно соединены с выходом второго оперативного запоминающего устройства и с первым входом первого блока элементов ИЛИ, имеющего второй вход, соединенный с выходом вычитателя с контролируемой разностью, и имеющим выход, соединенный с входом постоянного запоминающего устройства, а вышеупомянутый выход второго оперативного запоминающего устройства соединен с первым входом блока элементов совпадения, второй вход которого и выход соответственно соединены с вышеупомянутым третьим входом второго постоянного запоминающего устройства и с первым входом второго блока элементов ИЛИ, второй вход и выход которого соответственно соединены с выходом оперативного запоминающего устройства и со вторым входом вычитателя.
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1999 |
|
RU2168739C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1996 |
|
RU2119176C1 |
| РАДИОЛОКАТОР | 1995 |
|
RU2096806C1 |
| US 4642641 A, 10.02.1987 | |||
| US 4241346 A, 23.12.1980. | |||

