Изобретение относится к машиностроению, а именно к механизмам для преобразования вращательного движения в поступательное.
Известен кривошипно-ползунный механизм общего назначения ([1], стр.183, сх. а), он состоит из кривошипа, шатуна и ползуна. Этот механизм позволяет получать возвратно-поступательное движение ползуна, при этом такой механизм в силу своей структуры не может являться механизмом переменной структуры.
Наиболее близким к предлагаемому является механизм двигателя со скользящим цилиндром ([2], стр.491, сх. 1504), который состоит из трехколенчатого кривошипного вала, двух шатунов, поршня и цилиндра.
Недостатком такого механизма является то обстоятельство, что использование подвижного цилиндра ведет к усложнению конструкции механизма, а трехколенчатый кривошипный вал труден для изготовления.
Задачей предлагаемого изобретения является упрощение форм звеньев и использование для передачи вращательного движения в поступательное механизма переменной структуры.
Сущность изобретения заключается в том, что предлагается кривошипно-ползунный механизм переменной структуры, включающий кривошип, два шатуна различной длины и ползун, при этом между кривошипом и шатунами устанавливается трехпарное звено, а ползун снабжен продольной полостью для осуществления возможности поступательного движения шарнира одного из шатунов через упругий элемент.
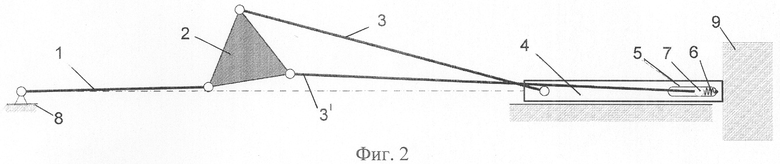
На фиг.1 и 2 показан предлагаемый кривошипно-ползунный механизм переменной структуры.
На фиг.1 показано некоторое промежуточное положение предлагаемого механизма, на фиг.2 - механизм в момент остановки ползуна вследствие упора в неподвижный объект.
Механизм содержит: кривошип 1, трехпарное звено 2, имеющее три вращательных кинематических пары, шатуны 3 и 3' различной длины, ползун 4, продольную полость 5, упругий элемент (пружину) 6, подвижный шарнир 7, имеющий возможность поступательного движения, стойка 8, относительно которой осуществляется вращение кривошипа 1, неподвижный объект 9.
Из фиг.1 следует, что в любом рабочем положении механизма, кроме положения, когда механизм находится в фазе упора в неподвижный объект, шарнир 7 не имеет возможности осуществления поступательного движения в продольной полости 5 в силу действия на него упругого элемента 6.
Когда ползун 4 упирается в неподвижный объект 9 (фиг.2), шарнир 7 стремится получить возможность поступательного движения в пределах продольной полости 5 и становится воздействующей на упругий элемент (пружину) силой, сжимая ее.
Работает механизм следующим образом: при задании вращательного движения кривошипу 1 трехпарное звено, воздействуя на шатуны, через них передаст движение ползуну 4, который получает возвратно-поступательное движение, при этом шарнир 7, имеющий возможность осуществления поступательного движения в продольной полости 5, в момент прохождения упора в неподвижный объект, воздействует на упругий элемент (пружину), обеспечивая прохождение кривошипом крайнего правого положения, после чего уже упругий элемент (пружина) становится воздействующей на шарнир 7 и шатун 3' силой, запасенной в сжатой пружине. Эта сила позволяет шарниру 7 установиться в положении невозможности поступательного движения до момента следующей остановки ползуна вследствие упора в неподвижный объект.
Источники информации
1. Крайнев А.Ф. Словарь-справочник по механизмам. 2-е изд., переработанное и дополненное. - М.: Машиностроение, 1987 г., 560 с.
2. Артоболевский И.И. Механизмы в современной техники. В 7 томах. Т.II: Кулисно-рычажные и кривошипно-ползунные механизмы. - 2-е изд., переработанное. - М.: Наука. Главная редакция физико-математической литературы, 1979 г., 560 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПЕРЕГРУЖАТЕЛЯ | 2006 |
|
RU2340816C2 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ СО СДВОЕННЫМ ШАТУНОМ | 2006 |
|
RU2298124C1 |
| ПРОХОДНОЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2005 |
|
RU2289741C1 |
| УДАРНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2006 |
|
RU2303728C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ШАТУНОМ | 2011 |
|
RU2450186C1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| УДАРНЫЙ МЕХАНИЗМ | 1998 |
|
RU2143073C1 |
| УДАРНЫЙ МЕХАНИЗМ | 1998 |
|
RU2147662C1 |
| ПОЛНОПОВОРОТНЫЙ ДВУХКРИВОШИПНЫЙ ПЛОСКИЙ МЕХАНИЗМ С ПОДВИЖНЫМ ЛИНЕЙНЫМ ГИДРОПРИВОДОМ | 2012 |
|
RU2520623C2 |
Изобретение относится к машиностроению, а именно к механизмам для преобразования вращательного движения в поступательное. Механизм включает кривошип, два шатуна различной длины и ползун. Между кривошипом и шатунами устанавливается трехпарное звено. Ползун снабжен продольной полостью для осуществления поступательного движения шарнира одного из шатунов через упругий элемент. Достигается упрощение формы звеньев и возможность использования механизма для преобразования вращательного движения в поступательное. 2 ил.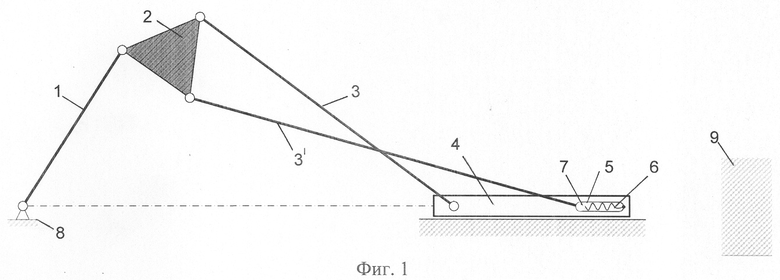
Кривошипно-ползунный механизм переменной структуры, включающий кривошип, два шатуна различной длины и ползун, отличающийся тем, что между кривошипом и шатунами устанавливается трехпарное звено, при этом ползун снабжен продольной полостью для осуществления возможности поступательного движения шарнира одного из шатунов через упругий элемент.
| АРТОБОЛЕВСКИЙ И.И | |||
| Механизмы в современной технике | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Том: Кулисно-рычажные и кривошипно-ползунные механизмы | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Наука, Главная редакция физико-математической литературы, 1979, с.491, схема 1504 | |||
| US 2005076728 А, 14.04.2005 | |||
| Кривошипно-ползунный механизм | 1990 |
|
SU1719732A2 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПРЕССА | 2001 |
|
RU2201348C1 |
| Кривошипно-ползунный механизм с регулируемой остановкой | 1988 |
|
SU1594331A1 |

