Изобретение относится к машиностроению, а именно к подъемно-транспортным машинам.
Известен механизм перегрузочного стола ([1], стр.273, правая колонка), он состоит из гидроцилиндра, двух коромысел, стола, шатуна, конической зубчатой пары и двигателя. Этот механизм позволяет приводить в движение поворотный стол, с которого предметы перегружаются на конвейер, при этом такой механизм не способен перегружать предметы с одного конвейера на другой.
Наиболее близким к предлагаемому является механизм перегрузочной платформы ([1], стр.273, левая колонка), который состоит из подвижной платформы, конечного выключателя, каретки, двух параллельных кривошипов, двух пружин, отсекателя, рычага, рейки, пневмоцилиндра и пары зубчатых колес.
Недостатком такого механизма является то обстоятельство, что использование пневмоцилиндра совместно с рейкой ведет к усложнению конструкции механизма, а параллельная установка кривошипов требует высокой точности при сборке и изготовлении последних.
Задачей предлагаемого изобретения является упрощение конструкции механизма и исключение наклона и соскальзывания изделия в процессе перегружения.
Сущность изобретения заключается в том, что предлагается кривошипно-ползунный механизм перегружателя, включающий подвижный стол, связанный с двумя шатунами различной длины, кривошип и ползун, при этом кривошип с шатунами различной длины соединен через трехпарное звено, один из шатунов связан с подвижным столом через ползун, расположенный в полости рабочего стола, и упругие элементы, обеспечивающие поворот кривошипа на полный оборот для возвратно-поступательного движения подвижного стола.
На фигурах 1, 2 и 3 показан предлагаемый кривошипно-ползунный механизм перегружателя.
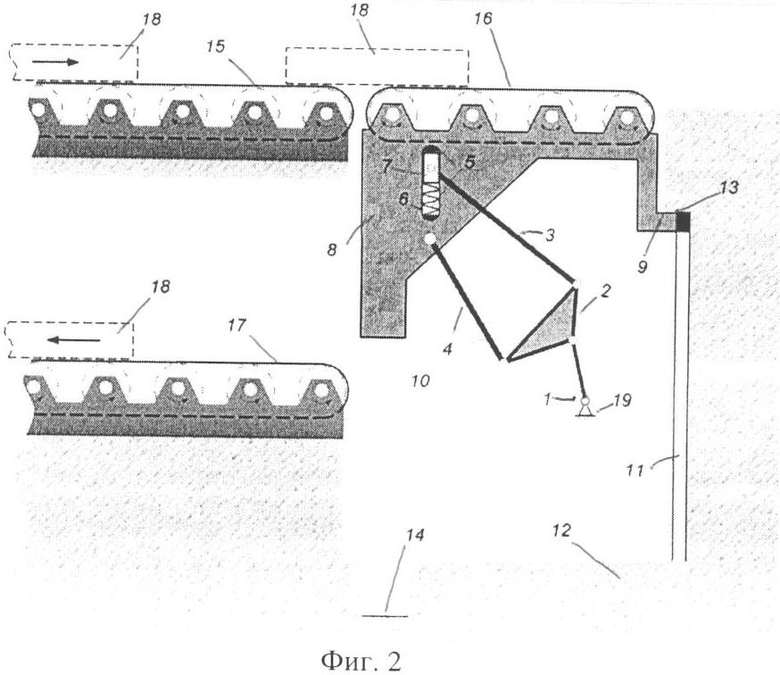
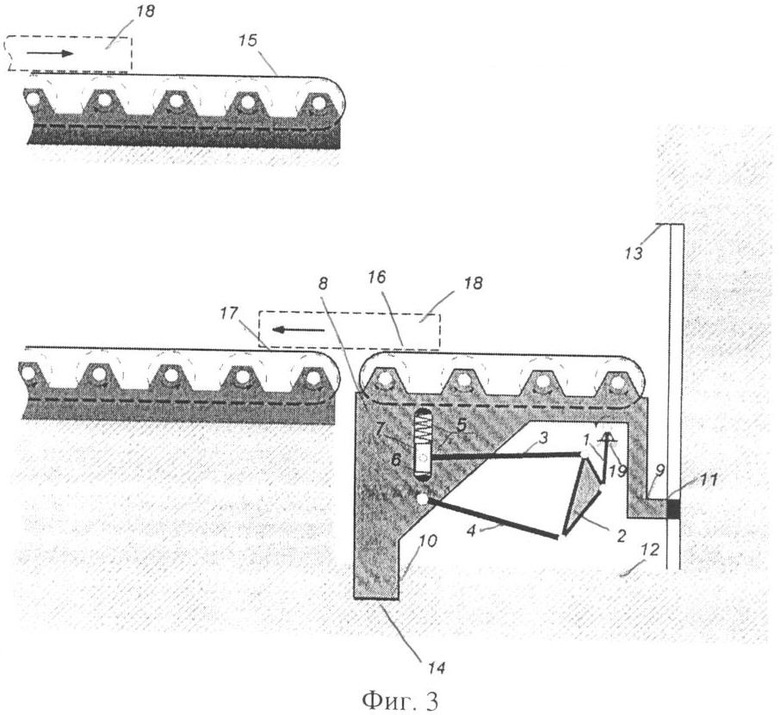
На фигуре 1 показано некоторое промежуточное положение предлагаемого механизма, на фигуре 2 - механизм в момент перегрузки изделия с конвейера, расположенного на верхнем уровне, на конвейер подвижного стола, на фигуре 3 - механизм в момент перегрузки изделия с конвейера подвижного стола на конвейер, расположенный на нижнем уровне.
Механизм содержит кривошип 1, трехпарное звено 2, шатуны 3 и 4 различной длины, упругие элементы (пружины) 5, продольную полость 6, ползун 7, подвижный стол 8 с упорными поверхностями 9 и 10, направляющую 11 возвратно-поступательного движения подвижного стола, стойку 19, относительно которой осуществляется вращение кривошипа 1, неподвижное основание 12 с упорными поверхностями 13 и 14, конвейер верхнего уровня 15, конвейер подвижного стола 16, конвейер нижнего уровня 17 и изделие 18.
Из фигуры 1 следует, что в любом рабочем положении механизма, кроме положения, когда подвижный стол 8 находится в фазе упора о неподвижное основание, ползун 7 не имеет возможности осуществления поступательного движения в продольцой полости 6 в силу действия на него упругих элементов 5.
Когда подвижный стол 8 упирается упорной поверхностью 9 в неподвижное основание 12, а именно в упорную поверхность 13 (фигура 2), ползун 7 стремится получить возможность поступательного движения в пределах продольной полости 6 и становится воздействующим на упругие элементы (пружины) с силой, способной сжимать ее.
Работает механизм следующим образом: при задании вращательного движения кривошипу 1 трехпарное звено, воздействуя на шатуны, через них передаст движение подвижному столу 8, который получает возвратно-поступательное движение, при этом ползун 7, имеющий возможность осуществления поступательного движения в продольной полости 6, в момент упора о неподвижное основание воздействует на упругие элементы (пружины), обеспечивая остановку подвижого стола и полный проворот кривошипа, благодаря чему изделие 18 плавно перегружается с конвейера верхнего уровня на конвейер 16 подвижного стола, после чего уже упругие элементы (пружины) становятся воздействующими на ползун 7 и шатун 3 с силой, запасенной в пружинах. Эти силы позволяют ползуну 7 установиться в положении невозможности поступательного движения до момента упора подвижного стола упорной поверхностью 10 (фигура 3) в соответствующую упорную поверхность 14 неподвижного основания. При этом происходит аналогичная остановка подвижного стола, и изделие 18 плавно перегружается на конвейер нижнего уровня.
Источник информации
Крайнев А.Ф. Словарь-справочник по механизмам. 2-е изд., переработанное и дополненное. - М.: Машиностроение, 1987 г. - 560 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ПЕРЕМЕННОЙ СТРУКТУРЫ | 2006 |
|
RU2301928C1 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ СО СДВОЕННЫМ ШАТУНОМ | 2006 |
|
RU2298124C1 |
| Шаговый конвейер | 1979 |
|
SU804550A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ШАТУНОМ | 2011 |
|
RU2450186C1 |
| ПРОХОДНОЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2005 |
|
RU2289741C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| МАШИНА ДЛЯ УКЛАДКИ В ТАРУ ИЗДЕЛИЙ УДЛИНЕННОЙ ФОРМЫ | 2001 |
|
RU2176973C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ ПРЕССА | 2008 |
|
RU2378118C1 |
| УСТРОЙСТВО ДЛЯ ПЛАЗМЕННОГО НАПЫЛЕНИЯ КЛИНОВИДНЫХ ИЗДЕЛИЙ | 2007 |
|
RU2347846C2 |
Изобретение относится к машиностроению, а именно к подъемно-транспортным машинам. Кривошипно-ползунный механизм перегружателя содержит подвижный стол, связанный с двумя шатунами различной длины, кривошип и ползун. Кривошип с шатунами различной длины соединен через трехпарное звено. Один из шатунов связан с подвижным столом через ползун, расположенный в полости рабочего стола, и упругие элементы, обеспечивающие поворот кривошипа на полный оборот для возвратно-поступательного движения подвижного стола. Достигается упрощение конструкции механизма и исключение наклона и соскальзывания изделия в процессе перегружения. 3 ил.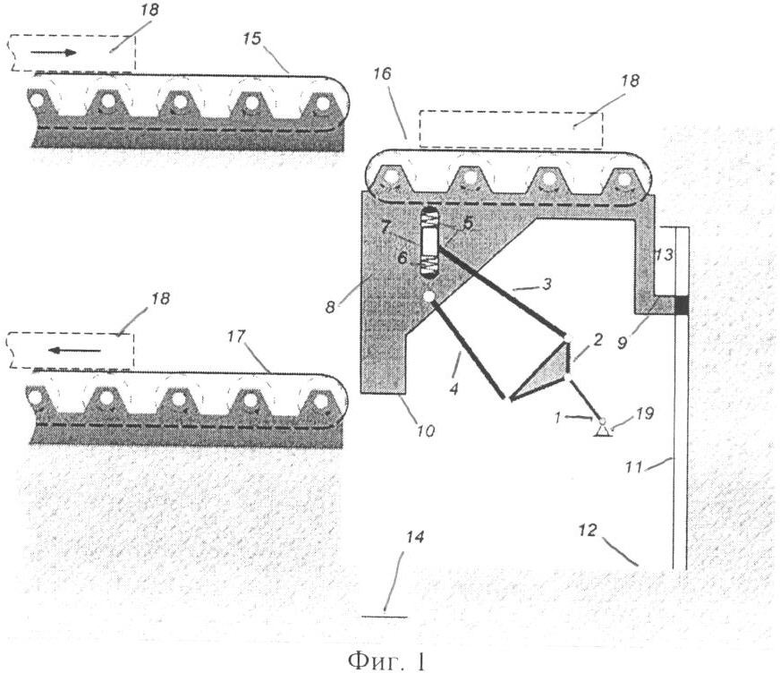
Кривошипно-ползунный механизм перегружателя, включающий подвижный стол, связанный с двумя шатунами различной длины, кривошип и ползун, отличающийся тем, что кривошип с шатунами различной длины соединен через трехпарное звено, один из шатунов связан с подвижным столом через ползун, расположенный в полости рабочего стола, и упругие элементы, обеспечивающие поворот кривошипа на полный оборот для возвратно-поступательного движения подвижного стола.
| КРАЙНЕВ А.Ф | |||
| Словарь-справочник по механизмам | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и дополн | |||
| - М.: Машиностроение, 1987, с.273, левая колонка | |||
| Шарнирно-рычажный механизм | 1981 |
|
SU991093A1 |
| JP 60094251 А, 27.05.1985. | |||

