Изобретение относится к машиностроению, а именно к механизмам для преобразования вращательного движения в поступательное.
Известен кривошипно-ползунный механизм общего назначения ([1], стр.183, сх.а.), он состоит из кривошипа, шатуна и ползуна. Такой механизм не может быть использован как проходной.
Наиболее близким к предлагаемому является кривошипно-ползунный механизм с кривошипом и шатуном равной длины ([2], стр.440 сх.1409, на которой показана его структурная схема, состоящая из кривошипа, шатуна и ползуна). Этот механизм позволяет получать возвратно-поступательное движение ползуна, при этом такой механизм обеспечивает проход ползуна через ось вращения кривошипа влево и вправо от этой оси.
Недостатком такого проходного механизма является неопределенность в движении, которое возникает в положении, когда ось вращения кривошипа оказывается совпадающей с осью соединения шатуна с ползуном. В этом случае при равных длинах кривошипа и шатуна последние совмещаются и ползун получает возможность остановиться, а механизм тогда превращается в единый кривошип.
Задачей предлагаемого изобретения является исключение возможности возникновения неопределенности в движении механизма и обеспечение полного хода ползуна, равного четырем длинам кривошипа.
Сущность изобретения заключается в том, что предлагается проходной кривошипно-ползунный механизм, включающий кривошип, шатун и ползун, соединенные между собой шарнирами, с одинаковыми длинами шатуна и кривошипа, шатун выполнен за одно целое с кулачком, входящим в постоянный контакт с плоским толкателем, имеющим возможность двигаться относительно ползуна, воздействуя на упругий элемент (пружину), при этом геометрическая ось шатуна и ось кулачка, проходящая через наиболее удаленную от центра кулачка точку профиля, развернуты относительно друг друга на угол, больше 90°.
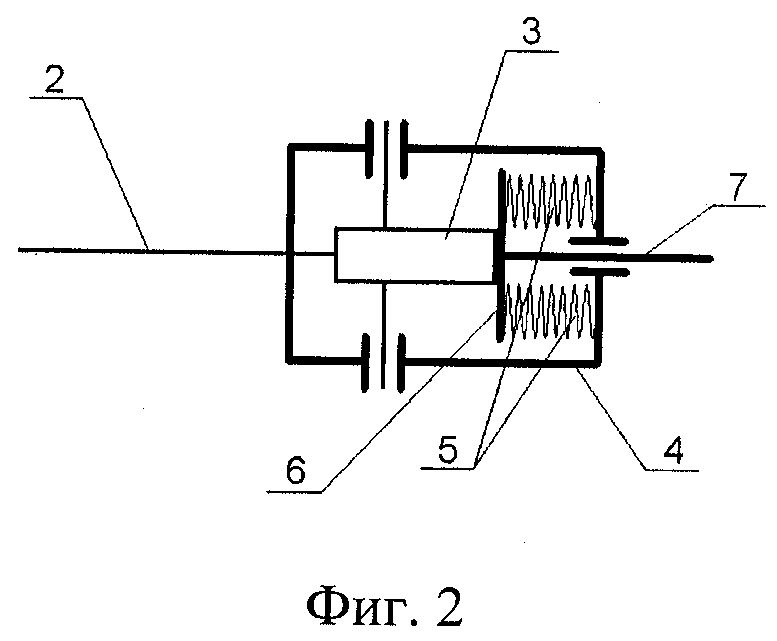
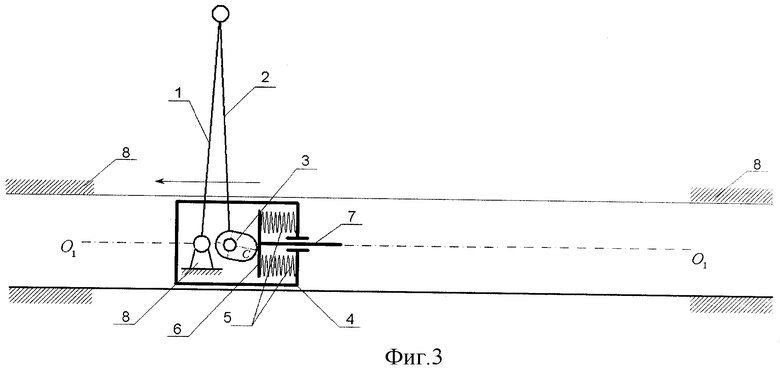
На фигуре 1 показано некоторое промежуточное положение предлагаемого механизма, на фигуре 2 - вид на ползун в плане (сверху) и на фигуре 3 - механизм в момент срабатывания упругого элемента (пружины) при переходе кулачка через наиболее удаленную его точку.
Механизм содержит: кривошип 1, шатун 2, выполненный за одно целое с кулачком 3, ползун 4, упругий элемент (пружину) 5, плоский толкатель 6, направляющие толкателя 7, 8 - стойка, относительно которой осуществляется движение, О1О1 - геометрическая ось поступательного движения ползуна, ϕ=90° - прямой угол, Δϕ - малый угол, дополняющий угол ϕ до угла более 90°. А и В лучи, выходящие из центра шарнира, соединяющего шатун и ползун, А - под углом ϕ=90° к шатуну, В - под углом Δϕ к лучу А и проходящий через наиболее удаленную от центра кулачка точку профиля С. Стрелкой показано направление вращения кривошипа 1. Движение всех звеньев осуществляется относительно неподвижной стойки.
Из фигуры 1 следует, что в любом рабочем положении механизма можно увидеть два луча выходящих из центра шарнира, связывающего шатун с кулачком и ползуном, при этом луч А выходит под углом ϕ=90° к шатуну, а наиболее удаленная от центра шарнира точка С профиля кулачка 3 лежит на луче В, развернутом относительно луча А на малый угол Δϕ так, что сумма углов (ϕ+Δϕ) оказывается более 90°. На фигуре 2 показано взаимодействие кулачка 3, соединенного за одно целое с шатуном 2, с толкателем 6, опирающийся на упругий элемент (пружину) 5 ползуна 4.
Когда оси шарниров кривошипа 1 со стойкой 8 (фигура 3) и шатуна 2 с ползуном 3 сближаются и кулачок 3 проворачивается своей наиболее удаленной точкой С относительно плоского толкателя 6, после чего плоский толкатель 6 за счет накопленной упругости в пружине 5 начинает воздействовать на кулачок, а с ним и на весь шатун, заставляя его гарантировано пройти через точку совпадения осей кривошипа со стойкой и шатуна с ползуном.
Работает механизм следующим образом, при задании вращательного движения кривошипу 1 ползун 4 через шатун 2 начинает двигаться поступательно, при этом совместно с шатуном поворачивается кулачок 3, воздействуя на плоский толкатель 6, который в свою очередь через тарелку толкателя 6 воздействует на упругий элемент пружину 5, сжимая ее. При приближении геометрических осей кривошипа со стойкой и шатуна с ползуном кулачок проворачивается своей наиболее удаленной точкой относительно толкателя, после чего уже толкатель становится воздействующей на кулачок и шатун силой, запасенной в сжатой пружине. Эта сила позволяет ползуну пройти через точку совпадения осей кривошипа со стойкой и шатуна с ползуном.
Источники информации
1. Крайнев А.Ф. Словарь-справочник по механизмам. 2-е изд., переработанное и дополненное. - М.: Машиностроение, 1987 г. - 560 с.
2. Артоболевский И.И. Механизмы в современной технике. В 7 томах. Т.II: Кулисно-рычажные и кривошипно-ползунные механизмы. - 2-е изд., переработанное. - М.: Наука. Главная редакция физико-математической литературы, 1979 г. - 560 с.
Изобретение относится к машиностроению, а именно к механизмам для преобразования вращательного движения в поступательное. Механизм состоит из кривошипа, шатуна и ползуна, соединенных между собой шарнирами. Шатун и кривошип имеют одинаковую длину. Шатун выполнен за одно целое с кулачком, входящим в постоянный контакт с плоским толкателем. Толкатель имеет возможность двигаться относительно ползуна, воздействуя на упругий элемент, например пружину. Геометрическая ось шатуна и ось кулачка, проходящая через наиболее удаленную от центра кулачка точку профиля, развернуты относительно друг друга на угол больше 90°. Технический результат заключается в исключении возможности возникновения неопределенности в движении механизма и обеспечении полного хода ползуна, равного четырем длинам кривошипа. 3 ил.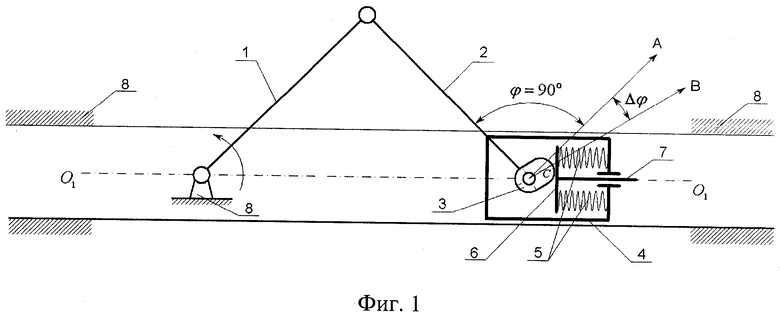
Проходной кривошипно-ползунный механизм, включающий кривошип, шатун и ползун, соединенные между собой шарнирами, с одинаковыми длинами шатуна и кривошипа, отличающийся тем, что шатун выполнен за одно целое с кулачком, входящим в постоянный контакт с плоским толкателем, имеющим возможность двигаться относительно ползуна, воздействуя на упругий элемент, например пружину, при этом геометрическая ось шатуна и ось кулачка, проходящая через наиболее удаленную от центра кулачка точку профиля, развернуты относительно друг друга на угол, больший 90°.
| СПОСОБ ЗАЩИТЫ УСТРОЙСТВА ИЗ ТУГОПЛАВКОГО МЕТАЛЛА С ЖИДКИМ ЩЕЛОЧНЫМ ТЕПЛОНОСИТЕЛЕМ | 2001 |
|
RU2208662C2 |
| GB 1131253 A, 23.10.1968 | |||
| GB 672952 A, 28.05.1952 | |||
| КУЛАЧКОВО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2003 |
|
RU2253779C1 |
| Устройство для измерения температуры | 1980 |
|
SU1081436A1 |

