0U3j
///////
шение надежности механизма за счет дополнительного фиксирования ведомого звена при выполнении им рабочего цикла. В исходном положении давление в цилиндре управления отсутствует, а ползуны 3 и 8 под действием своих пружин находятся в положении, когда оси вращения кривошипа 5 и коромысла совмещены. Вращение кривошипа 5 преобразуется в коле :бательные движение коромысла, а ведомый ползун 3 остается неподвижным. Механизм }работает в режиме холостого хода. Для перевода в рабочий режим без остановки
механизма подают давление в цилиндр, который зажимает диск между выступом и упором. Коромысло останавливается и вместе с ползунами 3 и 8 образует единую жест- кую систему. Механизм превращается в кри- вошипно-ползунный, в котором непрерывное вращение кривошипа 5 преобразуется в возвратно-поступательное движение ведомого ползуна 3. Механизм переходит в рабочий режим, длительность которого определяется
длительностью подачи давления в цилиндр. Механизм может работать и в импульсном режиме. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи длинномерного материала в рабочую зону пресса | 1987 |
|
SU1503948A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| Кривошипно-кулисный механизм с выстоем ведомого звена | 1988 |
|
SU1504433A1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Безмуфтовой механический пресс | 1991 |
|
SU1774921A3 |
| Устройство для раскрытия плоскосложенных пакетов | 1982 |
|
SU1090619A1 |
| Привод электротехнического аппарата | 1975 |
|
SU652622A1 |
| Механический пресс | 1989 |
|
SU1632788A1 |
| Шарнирно-рычажный механизм шаговых перемещений | 1986 |
|
SU1414985A1 |
| Кривошипно-ползунный механизм с регулируемым ходом ползуна | 1987 |
|
SU1444577A1 |
Изобретение относится к кривошипно-ползунным преобразователям непрерывного вращательного движения в возвратно-поступательное с регулируемой остановкой и найдет применение в различных машинах-автоматах. Цель изобретения - повышение надежности механизма за счет дополнительного фиксирования ведомого звена при выполнении им рабочего цикла. В исходном положении давление в цилиндре управления отсутствует, а ползуны 3 и 8 под действием своих пружин 4 и 9 находятся в положении, когда оси вращения кривошипа 5 и коромысла совмещены. Вращение кривошипа 5 преобразуется в колебательное движение коромысла, а ведомый ползун 3 остается неподвижным. Механизм работает в режиме холостого хода. Для перевода в рабочий режим без остановки механизма подают давление в цилиндр , который зажимает диск между выступом и упором. Коромысло останавливается и вместе с ползунами 3 и 8 образует единую жесткую систему. Механизм превращается в кривошипно-ползунный, в котором непрерывное вращение кривошипа 5 преобразуется в возвратно-поступательное движение ведомого ползуна 3. Механизм переходит в рабочий режим, длительность которого определяется длительностью подачи давления в цилиндр 13. Механизм может работать и в импульсном режиме. 4 ил.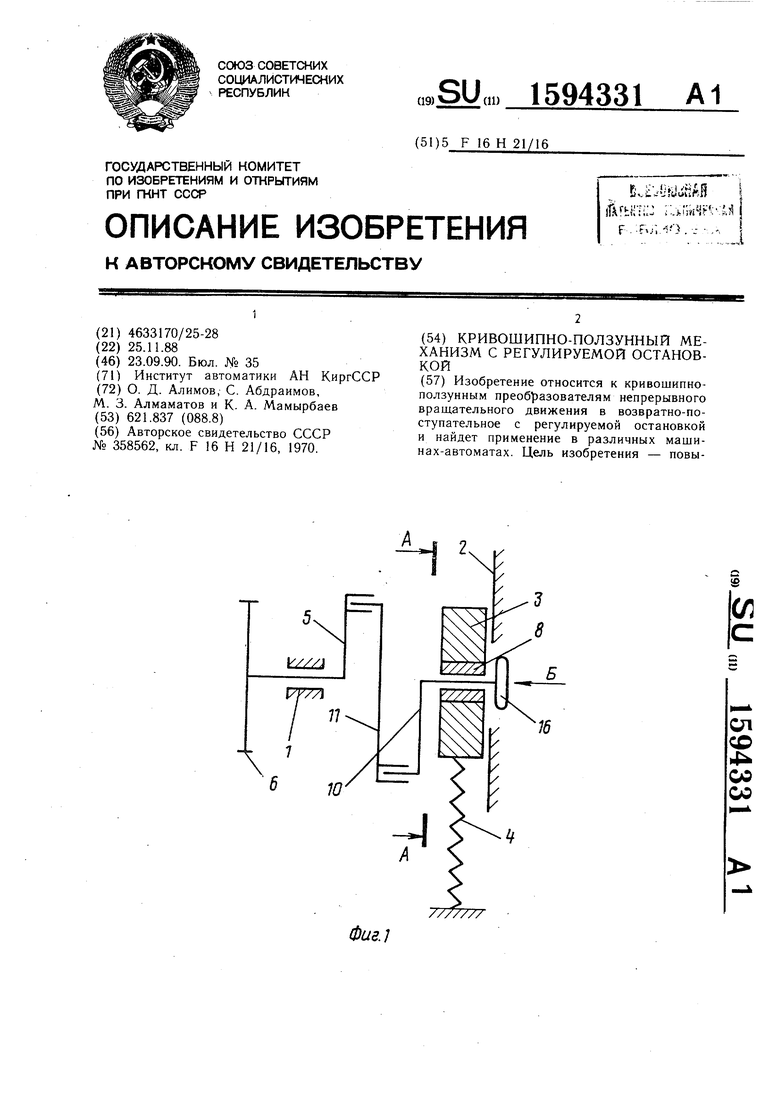
; Изобретение относится к машинострое- : нию, а именно к кривошипно-ползунным пре- ; образователям непрерывного вращательного
движения в возвратно-поступательное с оста- : ковками регулируемой длительности, и может найти применение в различных машинах-автоматах.
: Цель изобретения - повышение надежности механизма за счет дополнительного фиксирования ведомого звена при выполнении им рабочего цикла.
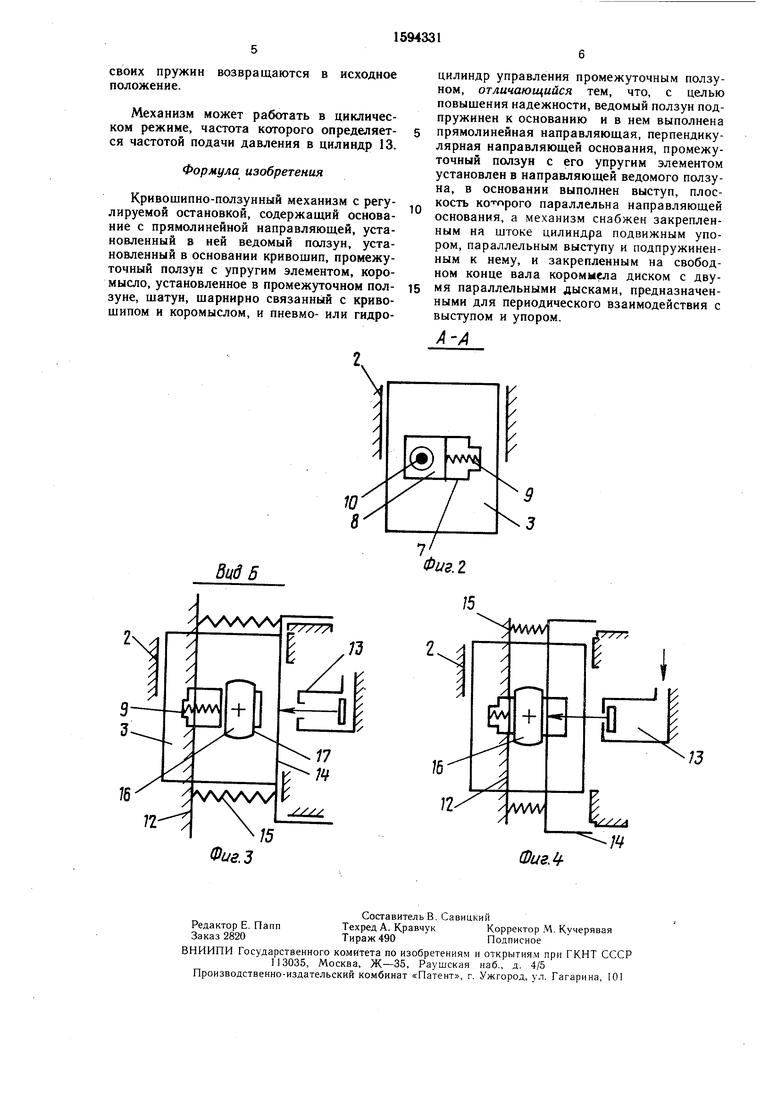
На фиг. 1 показана кинематическая схе- ма механизма; на фиг. 2 - сечение А-А ; на фиг. 1; на фиг. 3 - вид Б на фиг. 1; : на фиг. 4 - устройство дополнительной : фиксации ведомого звена.
Механизм содержит основание 1 с прямолинейной направляющей 2, установленный в направляющей 2 ведомый ползун 3, подпружиненный к основанию 1 пружиной 4, и установленный в основании 1 кривошип 5, получающий непрерывное вращение от привода (не показан), например, через зубчатое колесо 6.
В ведомом ползуне 3 выполнена прямолинейная направляющая 7, перпендикулярная направляющей 2 основания 1. В направляющей 7 установлен промежуточный ползун 8, подпружиненный к ползуну 3 упругим элементом 9. В промежуточном ползуне 8 установлено коромысло 10, шарнир- но связанное с кривощипом 5 шатуном 11. В основании 1 выполнен направляющий выступ 12, параллельный направляющей 2. На основании 1 установлен пневмо- или гидроцилиндр 13 управления промежуточным ползуном 8, а на штоке цилиндра закреплен подвижный упор 14, параллельный направляющему выступу 12 и подпружиненный к нему пружинами 15. На свободном конце вала коромысла 10 закреплен диск 16 с двумя параллельными дысками 17, предназначенными для периодического взаимодействия с упором 14 и выступом 12.
0 Механизм работает следующим образом. В исходном положении давление в цилиндре 13 отсутству.ет, упор 14 пружинами 15 отведен от направляющего выступа 12, промежуточный ползун 8 отжат пружиной 9 в крайнее левое положение внутри направ ляющей 7, а ведомый ползун пружиной 4 отжат в положение в.м.т.
При таком положении ползунов 3 и 8 оси вращения кривощипа 5 и коромысла 10 совмещены, поэтому вращение кривошипа 5 чеQ рез шатун 11 преобразуется в колебания коромысла 10 при сохранении неподвижности ведомого ползуна 3. Диск 16 при этом свободно поворачивается между выступом 12 и упором 14, а механизм работает в холостом режиме.
- Для приведения ведомого ползуна 3 в движение без остановки механизма подают давление в цилиндр 13, и его штвк, преодолевая противодействие пружин 15, перемешает упор 14 в направлении к направляющему выступу 12. Упор 14 вступает
0 во взаимодействие с соответствующей лыс- кой диска 16 и смещает его вместе с валом коромысла 10 и промежуточным ползуном 8 в сторону выступа 12. Диск 16 второй лыской прижимается к выступу 12 и коI ромысло 10 останавливается, при этом ведомый ползун 3, промежуточный ползун 8 и коромысло Ш образуют единую жесткую систему. Механизм превращается в кри- вошипно-ползунный, в котором непрерывное вращение кривошипа 5 преобразуется в возQ вратно-поступательное движение ведомого ползуна 3, при этом диск 16 перемещается вдоль выступа 12 и упора 14, как по направляющим. Механизм переходит в рабочий режим, длительность которого определяется длительностью подачи давления в ци5 линдр 13.
Для перевода механизма в режим холостого -хода перекрывают давление в цилиндре 13, и все звенья под действием
своих пружин возвращаются в исходное положение.
Механизм может работать в циклическом режиме, частота которого определяется частотой подачи давлеиня в цилиндр 13.
Формула изобретения
Кривошипио-ползунный механизм с регулируемой остановкой, содержащий основание с прямолинейной направляющей, установленный в ней ведомый ползун, установленный в основании кривощип, промежуточный ползун с упругим элементом, коромысло, установленное в промежуточном ползуне, щатун, шарнирно связанный с криво- щнпом и коромыслом, и пневмо- или гидроцилиндр управления промежуточным ползуном, отличающийся тем, что, с целью повышения надежности, ведомый ползун подпружинен к основанию и в нем выполнена прямолинейная направляющая, перпендикулярная направляющей основания, промежуточный ползун с его упругим элементом установлен в направляющей ведомого ползуна, в основанни выполнен выступ, плоскость ко- орого параллельна направляющей основания, а механизм снабжен закрепленным на штоке цилиндра подвижным упором, параллельным выступу и подпружиненным к нему, и закрепленным на свободном конце вала короммела диском с двумя параллельными дысками, предназначенными для периодического взаимодействия с выступом и упором.
А-/
| РЫЧАЖНЫЙ МЕХАНИЗМ ДЛЯ РЕГУЛИРОВАНИЯ ЗАКОНА ДВИЖЕНИЯ ВЕДОМОГО ЗВЕНА | 0 |
|
SU358562A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
