Изобретение относится к электротехнике, а именно к релейной защите, и может использоваться для защиты асинхронных электродвигателей от аварийных режимов.
Известен способ защиты асинхронного электродвигателя от повреждения и опасных режимов работы, при котором измеряются токи и напряжения на питающем конце линии, к которому подключен электродвигатель, определяется активная мощность на входе и выходе защищаемого двигателя, измеряется крутящий момент на валу электродвигателя, по рабочей характеристике определяется активная мощность, потребляемая электродвигателем в нормальном режиме при измеренном напряжении сети, определяются потери активной мощности в двигателе и формируется сигнал защиты, если указанные потери превышают заданную величину потерь активной мощности в нормальном режиме работы /см. а.с. 1594642, кл. Н02Н 7/08, 1990 г./.
Известно, что активная мощность на входе электродвигателя зависит от параметров качества электроэнергии /см. Курбацкий В.Г. Качество электроэнергии и электромагнитная совместимость в электрических сетях: Учебное пособие. - Братск: БрГТУ, 1999. - с 34, 36, 40/. Поскольку разность потерь в известном способе определяют как разность активной мощности на входе и мощности, потребляемой электродвигателем в нормальном режиме при измеренном напряжении сети и крутящем моменте на валу электродвигателя, то такая разность будет зависить от параметров качества электроэнергии

где P1 - активная мощность на входе электродвигателя в текущем режиме при фактическом качестве электроэнергии;
P1 ' - потребляемая электродвигателем из сети активная мощность в нормальном режиме, определенная по рабочей характеристике электродвигателя;
U2 - напряжение обратной последовательности;
I2 - ток обратной последовательности;
u1, u2, ..., un - спектр гармонических составляющих напряжения от 1 до n;
i1, i2, ..., in - спектр гармонических составляющих тока от 1 до n;
δU - отклонение напряжения, определяемые согласно ГОСТ-13109-97.
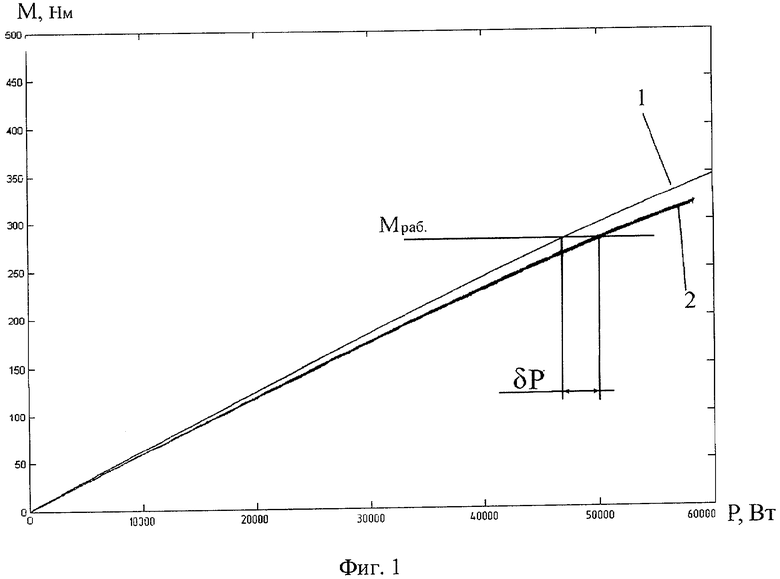
Например, возможно возникновение такого режима, когда происходит ухудшение качества электроэнергии, но в пределах норм, описанных в ГОСТ-13109-97, и отсутствует аварийный режим, работа электродвигателя еще допустима, однако разность потерь может превысить уставку, что приведет к отключению электродвигателя. Это объясняется тем, что расчетная рабочая характеристика определена без учета параметров качества электроэнергии, и при соответствующем крутящем моменте на валу расчетная мощность будет меньше измеренной активной мощности на входе, настолько, что разница может превысить уставку. Данный пример проиллюстрирован на фиг.1, на которой показана рабочая характеристика M=f(P) двигателя 4А180М4, где 1 - с учетом только отклонения напряжения на питающем конце линии; 2 - с учетом параметров качества электроэнергии (при коэффициенте несимметрии напряжения по обратной последовательности, равном 1%, коэффициенте 3-й гармонической составляющей равном 3%, отклонении напряжения, равном 3%).
Возможен и другой случай, когда при аварийном режиме активная мощность, выделяемая в виде тепла в месте повреждения незначительна, а соответственно, и разность потерь может оказаться меньше уставки срабатывания и защита не среагирует на аварийный режим, например, при витковом замыкании статорной обмотки. Исходя из этого, способ имеет низкую надежность.
Способ также имеет недостаток, который характеризуется низким быстродействием, например, при заклинивании ротора защита может среагировать со значительным запозданием, что приведет к необратимым последствиям, т.е. способ имеет низкое качество контроля.
Технический результат изобретения - повышение надежности и улучшение качества контроля защиты электродвигателя.
Технический результат достигается тем, что в способе защиты асинхронного электродвигателя от аварийных режимов, заключающемся в измерении тока и напряжения на питающем конце линии, к которой подключен электродвигатель, измерении крутящего момента на валу электродвигателя, угловой скорости вращения ротора электродвигателя, определении активной мощности на входе и выходе электродвигателя, потерь активной мощности в нем, формировании сигнала защиты, если указанные потери превышают заданную величину в нормальном режиме работы, дополнительно выделяют из измеренного напряжения на питающем конце линии параметры качества электроэнергии, определяют максимальный момент электродвигателя и формируют сигнал защиты, действующий на отключение электродвигателя, если измеренный крутящий момент на валу электродвигателя близок к максимальному моменту электродвигателя, при этом потери активной мощности и максимальный момент электродвигателя определяют с учетом выделенных параметров качества электроэнергии в текущий момент времени.
Сущность изобретения заключается в том, что контролируются две величины.
Первой контролируемой величиной является разность между активной мощностью на входе электродвигателя P1 и активной мощностью, потребляемой электродвигателем в нормальном режиме P1 ' при соответствующих параметрах качества электроэнергии и крутящем моменте на валу электродвигателя, в текущий момент времени

Второй контролируемой величиной является отношение между максимальным моментом Mмах и крутящим моментом на валу электродвигателя Ммех, определенных при соответствующих параметрах качества электроэнергии в текущий момент времени

Зависимость влияния параметров качества электроэнергии на максимальный момент и активную мощность на входе электродвигателя можно определить, используя элементы математического моделирования электрических машин /см. Копылов И.П. Математическое моделирование электрических машин. Учеб. для вузов. - 3-е изд., перераб. и доп. - М.: Высш. Шк, 2001, с.125-145/.
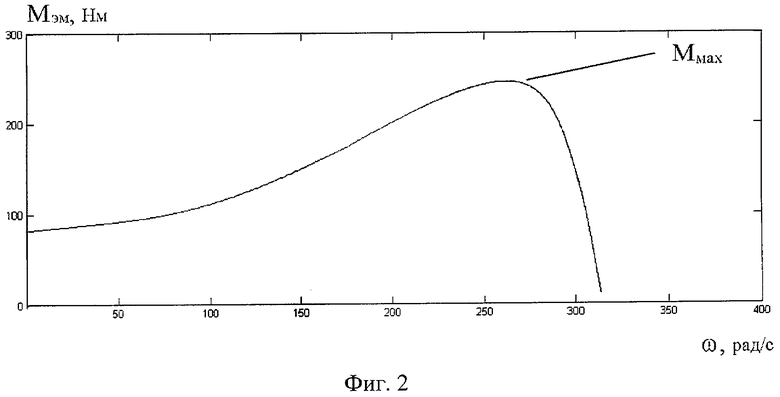
Ммах и Р1' определяются при заданных параметрах качества электроэнергии, при моделировании в режиме реального времени, для определенной мощности электродвигателя, при малых приращениях механического момента на валу электродвигателя. Пример механической характеристики электродвигателя 4А132М4 при синусоидальном, симметричном и номинальном напряжении питания, в статическом режиме, полученной путем моделирования, по которой можно определить максимальный момент, показан на фиг.2. Поочередно меняя параметры качества электроэнергии, можно получить массив данных для определения Ммах и P1 '. В таком массиве одна из строк или столбцов является Ммах и P1 '. Полученный массив программируется в микроконтроллер устройства, реализующего данный способ.
Преимущество предлагаемого способа перед известным заключается в том, что производится контроль механического момента на валу электродвигателя и его сравнение с возможным максимальным моментом, который может развить электродвигатель. Указанное действие позволяет защитить электродвигатель от опрокидывания и заклинивания ротора. Другим преимуществом является то, что максимальный момент и потери активной мощности определяются с учетом параметров качества электроэнергии, чем увеличивается надежность предлагаемого способа при отклонении параметров качества электроэнергии от допустимых.
На фиг.3 показана функциональная схема устройства для реализации предлагаемого способа.
Устройство защиты электродвигателя состоит из электродвигателя 1, датчиков тока 2-4, датчиков напряжения 5-7, датчика крутящего момента на валу электродвигателя 8, датчика угловой скорости 9; аналогового фильтра, выделяющего параметры качества электроэнергии 10, аналого-цифрового преобразователя 11, цифрового микроконтроллера 12 и исполнительного органа 13. Выходы датчиков 2, 3, 4, 8, 9 и фильтра 10 подключены к входу аналого-цифрового преобразователя 11, выход которого подключен к входу цифрового микроконтроллера 12, выход которого подключен к входу исполнительного органа 13, а выход последнего является выходом устройства в целом.
Значение P1 определяется микроконтроллером 11 по измеренным в цепи питания электродвигателя 1 значениям тока и напряжения, а значения P1' и Ммах определяются микроконтроллером 11 по заданному массиву данных, с учетом параметров качества электроэнергии и крутящего момента на валу электродвигателя.
Способ осуществляется следующим образом. В нормальном режиме с помощью датчиков 2-4 измеряются токи, а с помощью датчиков 5-7 измеряются напряжения на питающем конце линии электродвигателя. С помощью фильтра 10 выделяются параметры качества электроэнергии. С помощью преобразователя 11 аналоговые сигналы от датчиков 2, 3, 4, 8, 9 и фильтра 10 преобразуются в цифровые и поступают на вход микроконтроллера 12. По измеренным в цепи питания электродвигателя значениям тока и напряжения микроконтроллером 12 определяется значение P1. По выделенным параметрам качества электроэнергии микроконтроллером 12 определяется значения P1' и Ммах. По значениям P1' и P1 микроконтроллером 12 определяется разность (2), по значениям Ммах и Ммех определяется частное (3). Поскольку электродвигатель работает в нормальном режиме, то значения (2) и (3) меньше заданной величины срабатывания защиты и сигнал на отключение электродвигателя микроконтроллером 12 не формируется.
При возникновении аварийного режима, например обрыве фазного проводника, питающего электродвигатель, значение (2) превысит заданную величину срабатывания защиты, и микроконтроллер 12 сформирует сигнал защиты на отключение электродвигателя от сети. При набросе механической мощности на вал электродвигателя, следствием чего возможна перегрузка или остановка электродвигателя, значение (3) превысит заданную величину срабатывания защиты, и микроконтроллер 12 сформирует сигнал защиты на отключение электродвигателя от сети.
Предложенный способ может быть использован для защиты любого асинхронного электродвигателя от аварийного режима, особенно электродвигателя, питаемого напряжением с низким качеством электроэнергии и подверженного резким набросам механического момента на его вал.
Изобретение относится к электротехнике и может быть использовано для защиты асинхронных электродвигателей от аварийных режимов. Техническим результатом является повышение надежности и улучшение качества контроля защиты электродвигателя. Способ защиты асинхронного электродвигателя от аварийных режимов заключается в контроле двух величин: разности между фактической измеренной, потребляемой электродвигателем электрической мощностью и электрической мощностью, которая соответствует измеренной мощности на валу электродвигателя, определенной расчетным путем; отношением между фактическим максимальным электромагнитным моментом, который может развить электродвигатель, определенным расчетным путем и механическим моментом на валу электродвигателя. При этом контролируемые величины определяются с учетом параметров качества электроэнергии для текущего момента времени. 3 ил.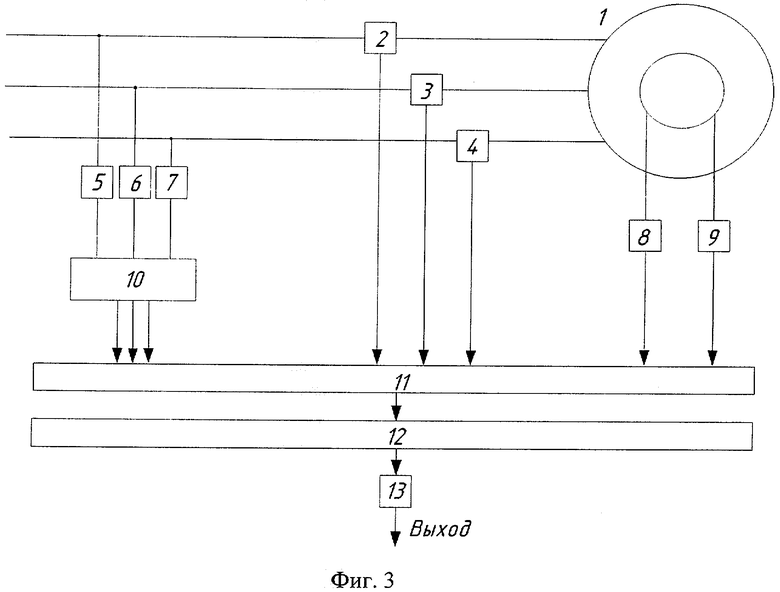
Способ защиты асинхронного электродвигателя от аварийных режимов, заключающийся в измерении тока и напряжения на питающем конце линии, к которой подключен электродвигатель, измерении крутящего момента на валу электродвигателя, угловой скорости вращения ротора электродвигателя, определении активной мощности на входе и выходе электродвигателя, потерь активной мощности в нем, формировании сигнала защиты, если указанные потери превышают заданную величину в нормальном режиме работы, отличающийся тем, что дополнительно выделяют из измеренного напряжения на питающем конце линии параметры качества электроэнергии, определяют максимальный момент электродвигателя, если измеренный крутящий момент на валу электродвигателя близок к максимальному моменту электродвигателя, формируют сигнал защиты, действующий на отключение электродвигателя, при этом потери активной мощности и максимальный момент электродвигателя определяют с учетом выделенных параметров качества электроэнергии в текущий момент времени.

