Изобретение, в общем, относится к транспортным средствам с автоматизированным управлением и, в частности, - к устройству и способу автоматизирования одного или нескольких транспортных средств для подземных горных работ, применяемых при непрерывной добыче.
Предшествующий уровень техники
При подземной проходке, такой как работы по добыче угля, желательна, в целях повышения производительности непрерывная работа устройства горной разработки, производящего отбойку угля из забоя. В этих целях необходимо обеспечить средства, которые должны быстро и непрерывно откатывать разрыхленный материал с места добычи в другое удаленное место. В настоящее время имеется одна такая система непрерывной откатки, используемая в угольных шахтах и содержащая совокупность конвейерных механизмов, соединенных друг с другом с возможностью поворота. Компоненты этой системы проходят по шахте от комбайна непрерывного действия. Комбайн непрерывного действия разбивает твердые залежи угля с получением материала, размеры которого более удобны для транспортирования в удаленный от комбайна участок. Некоторые компоненты этих систем могут быть выполнены в виде самоходных гусеничных подвижных конвейерных узлов, а другие могут быть выполнены в виде конвейеров, которые перекрывают пролет между подвижными узлами. Подвижные узлы, используемые в системе непрерывной откатки, иногда называют подвижными мостовыми транспортерами (ПМТ) и, как правило, они представляют собой цепные конвейеры, установленные на гусеничных транспортных средствах, каждое из которых эксплуатирует и ведет горняк.
В системе непрерывной откатки, которая может включать, например, несколько подвижных мостовых транспортеров, первый из нескольких подвижных мостовых транспортеров расположен вблизи разгрузочного конца комбайна непрерывного действия. Подвижный мостовой транспортер перемещается согласованно с комбайном непрерывного действия и принимает добытый материал в небольшой бункер на своем приемном конце. В другом варианте между комбайном непрерывного действия и подвижным мостовым транспортером может быть установлен подающий механизм-дробилка для дробления крупных кусков добытого материала. Разгрузочный конец подвижного мостового транспортера шарнирно соединен с другим компонентом системы непрерывной откатки, обычно с забойным цепным мостовым конвейером. Ряд шарнирно соединенных подвижных мостовых транспортеров и мостовых конвейеров обеспечивает средство для сочленения системы непрерывной откатки для огибания углов и обеспечения возможности перемещения согласованно с комбайном непрерывного действия. Обычный ПМТ имеет ведущий и задний конвейерные участки, выполненные с возможностью подъема и снижения под управлением оператора. Эти степени свободы существенно важны для обеспечения просветов соответствующих концов забойного цепного конвейера относительно кровли и пола в условиях переменных наклонов и подъемов. Дополнение системы парами гусеничных транспортных средств и мостовыми конвейерами может увеличить общую длину системы согласно необходимости данной определенной операции добычи. Конечный мостовой конвейер соединяют или соотносят с ленточным конвейером, который закреплен на грунте во время использования. Поэтому система непрерывной откатки обеспечивает быстрое и эффективное средство транспортирования добытого материала из забоя.
Совокупность соединенных ПМТ и забойных цепных мостовых конвейеров может проходить "зигзагом" по расстоянию нескольких сотен футов, например. Компоненты должны быть выполнены с возможностью продвижения вперед вместе с комбайном непрерывного действия с прохождением разных поворотов. Для согласования с работой системы каждый ПМТ имеет на одном или обоих концах тележку. Тележка выполнена с возможностью скользящего перемещения в продольном направлении и обеспечивает точку прикрепления для соответствующего мостового конвейера. Тележка обеспечивает для переднего ПМТ возможность продвижения с соответствующим следованием за ним заднего мостового транспортера. Задний мостовой конвейер также будет продвигать тележку заднего ПМТ. Задний ПМТ может оставаться стационарным во время продвижения передних компонентов. Задний ПМТ может затем продвигаться аналогичным образом, продвигая при этом еще один забойный цепной мостовой конвейер и тележку. Таким образом, соединенные компоненты могут продвигаться несинхронизированно, но при этом оператор ПМТ не будет видеть ПМТ впереди или позади себя и будет иметь только ограниченный обзор забойных цепных конвейеров, соединенных с его ПМТ. Оператор ПМТ имеет только ограниченный обзор стенки шахты напротив водительской кабины, и его обзор стенки шахты, ближайшей к кабине, ограничен условиями освещения и его непосредственной близостью к ней. Помимо этого, для каждого обычного ПМТ требуется присутствие оператора в кабине постоянно во время работ по добыче. Так, в случае длинного состава ПМТ и забойных цепных конвейеров многие операции с участием людей увеличивают накладные расходы и повышают риск травматизма.
Поэтому имеется необходимость создания системы непрерывной откатки, снижающей объем непосредственного участия людей в работе системы и повышающей возможность точного определения положения всей системы транспортера.
ПМТ или забойный цепной мостовой конвейер может оказаться на рельефе, при котором требуется регулирование высоты просвета между ним и кровлей шахты. ПМТ и мостовые конвейеры нужно при этом останавливать во время ручной регулировки высоты.
Сущность изобретения
Цель настоящего изобретения заключается в создании способа и устройства для определения положения подвижного мостового транспортера. Еще одна цель данного изобретения заключается в создании способа и устройства для автоматического подъема и снижения конвейера в соответствии с высотой кровли и условиями пола. Еще одна цель данного изобретения заключается в создании способа и устройства для определения угла между забойным цепным конвейером и, по меньшей мере, одним подвижным мостовым транспортером. Еще одна цель данного изобретения заключается в создании устройства и способа для определения перемещения отдельного подвижного мостового транспортера и также совокупности подвижных мостовых транспортеров и забойных цепных конвейеров как части системы непрерывной откатки. Еще одна цель данного изобретения заключается в создании способа и устройства для автоматизирования полной системы непрерывной откатки, в которой достигнуты все указанные цели.
Краткое описание чертежей
Настоящее изобретение будет более понятным из нижеследующего подробного описания со ссылками на прилагаемые чертежи, на которых изображено следующее:
фиг.1 изображает боковую вертикальную проекцию обычного подвижного мостового транспортера и забойного цепного конвейера, которые модифицированы и используются согласно описываемым устройству и способу;
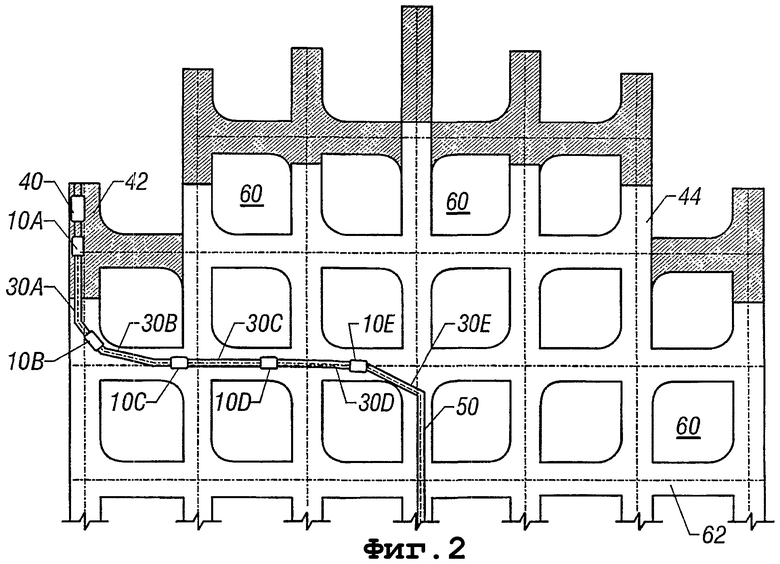
фиг.2 - вид сверху участка подземной выработки, иллюстрирующий общее положение и конфигурацию системы непрерывной откатки, автоматизированной согласно данному изобретению;
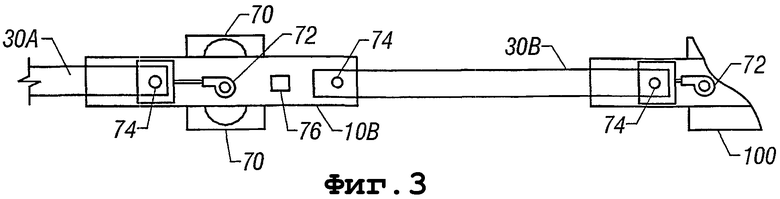
фиг.3 - схематичный вид сверху размещения датчиков согласно данному изобретению;
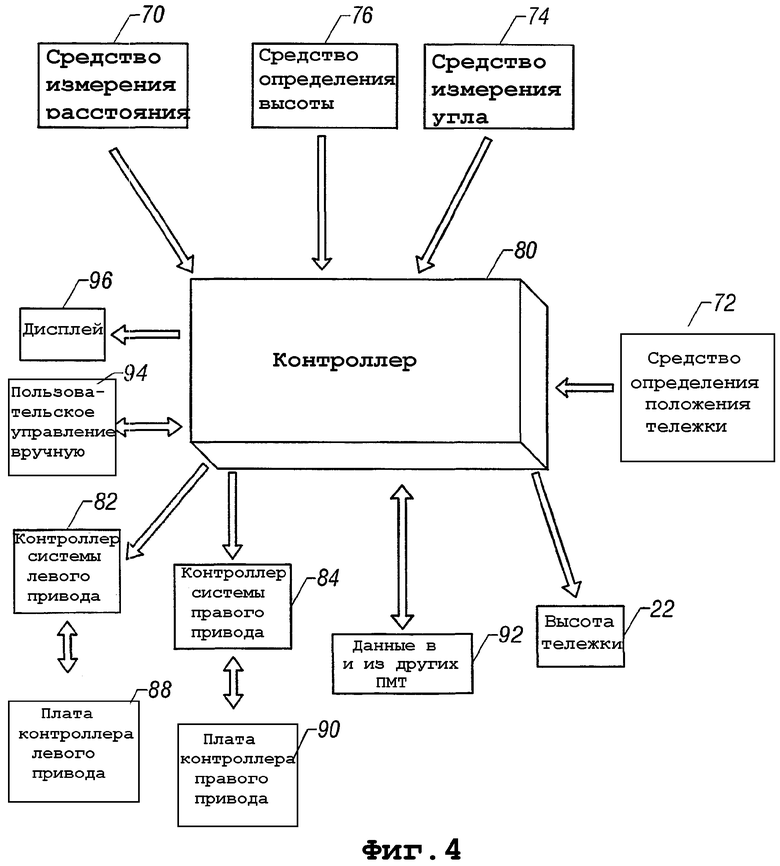
фиг.4 - блок-схему, иллюстрирующую входные и выходные сигналы электронного контроллера;
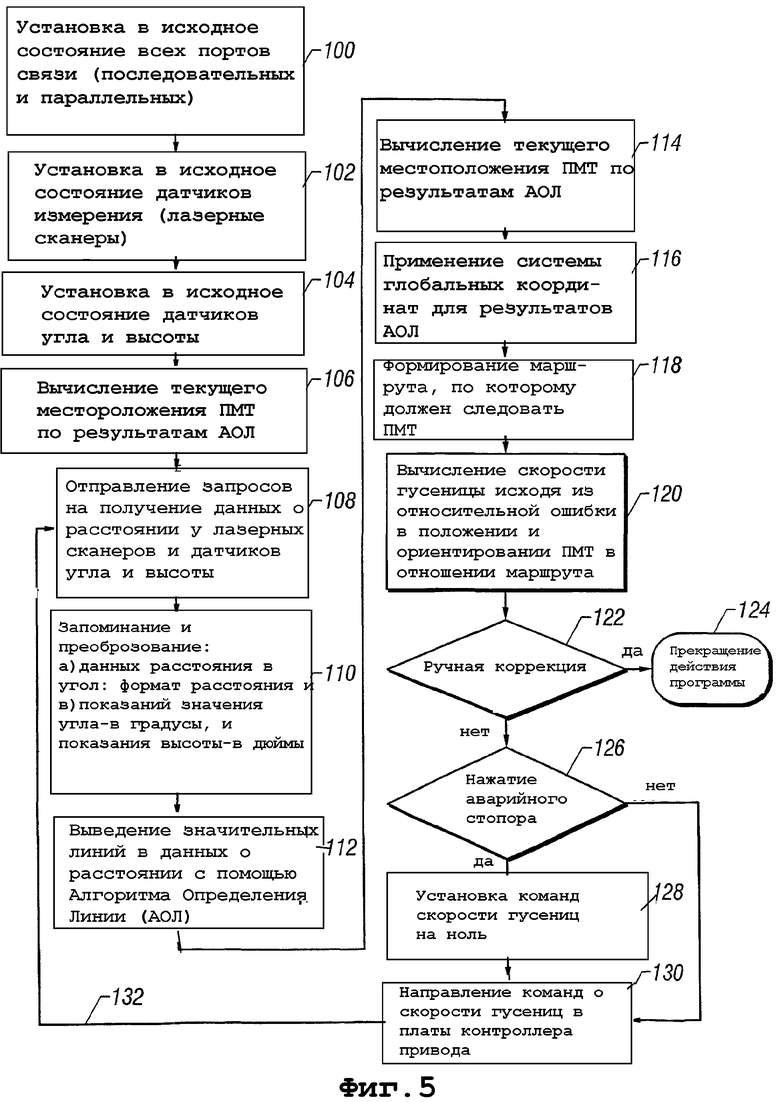
фиг.5 - блок-схему основного способа управления согласно данному изобретению;
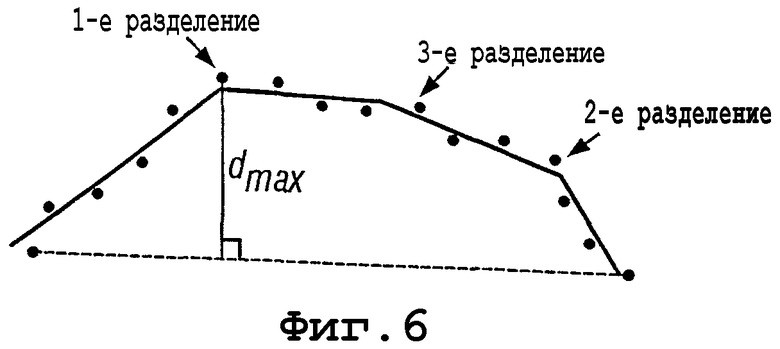
фиг.6 - схему типичного рекурсивного разделения данных о расстоянии;
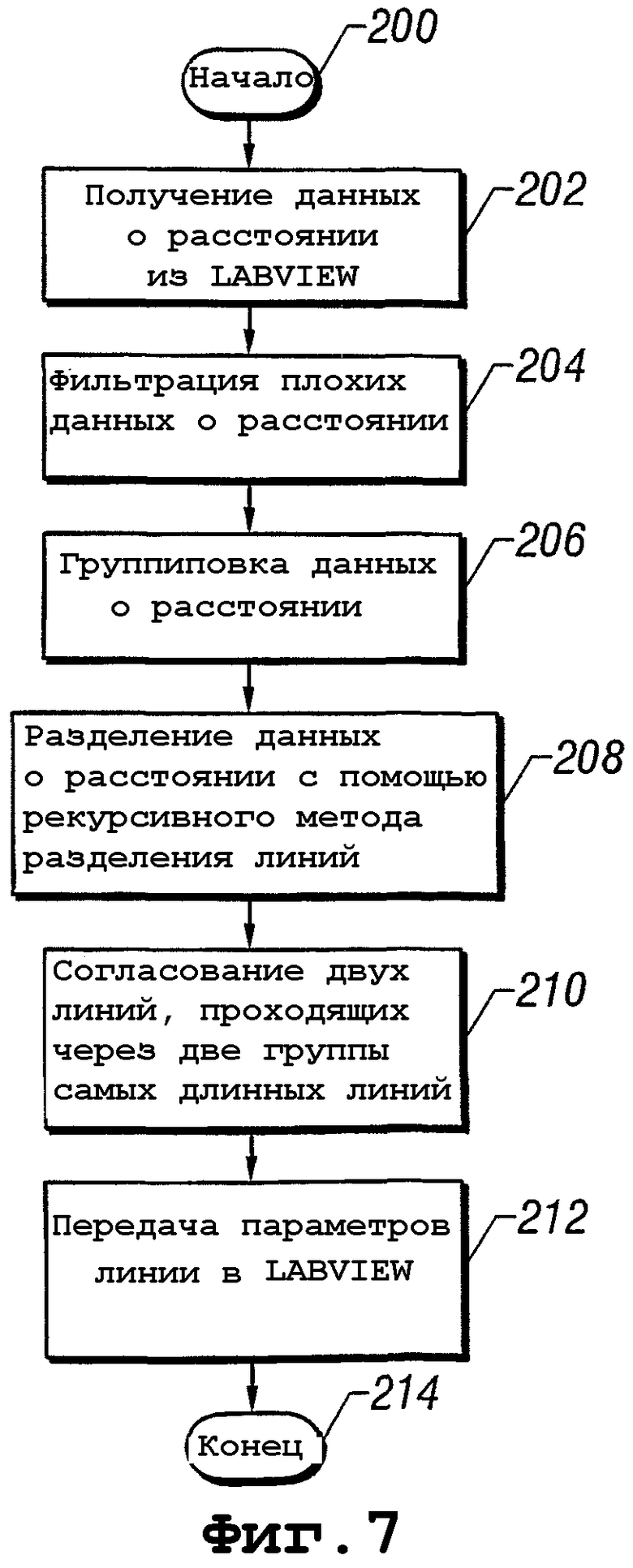
фиг.7 - блок-схему выведения Алгоритма Определения Линии согласно данному изобретению;
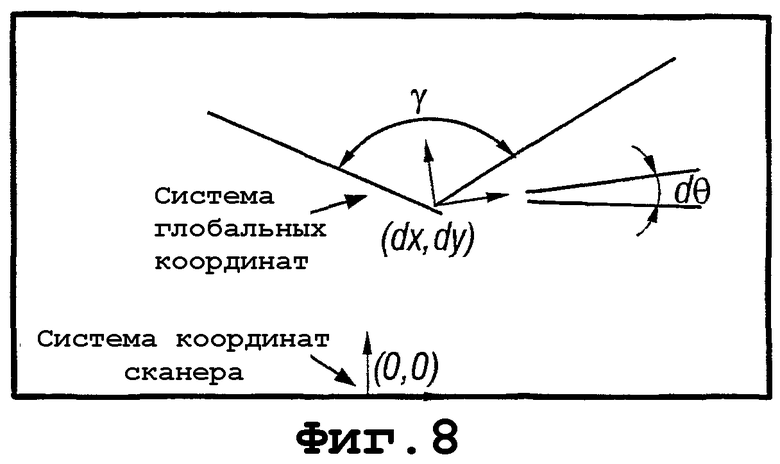
фиг.8 - графическое сравнение измерения в системе координат сканера относительно измерения в глобальной системе координат;
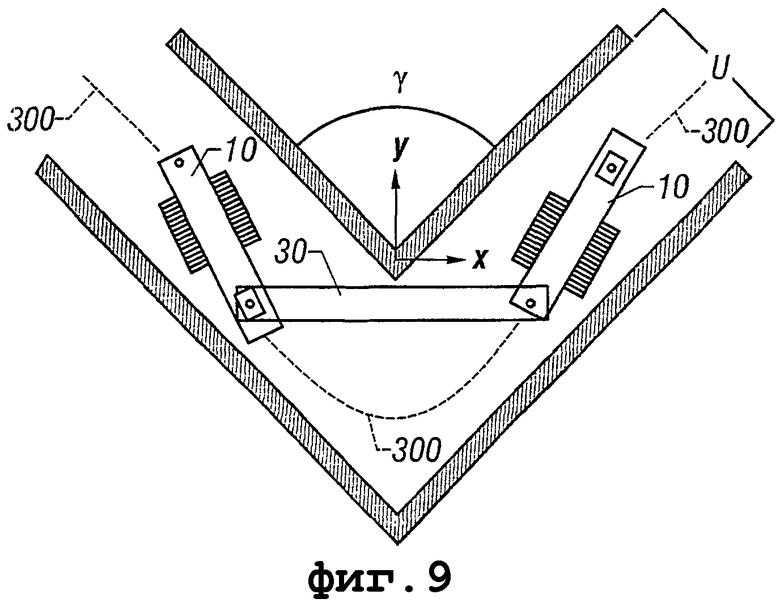
фиг.9 - вид сверху типичного маршрута согласно данному изобретению и соответствующих измерений;
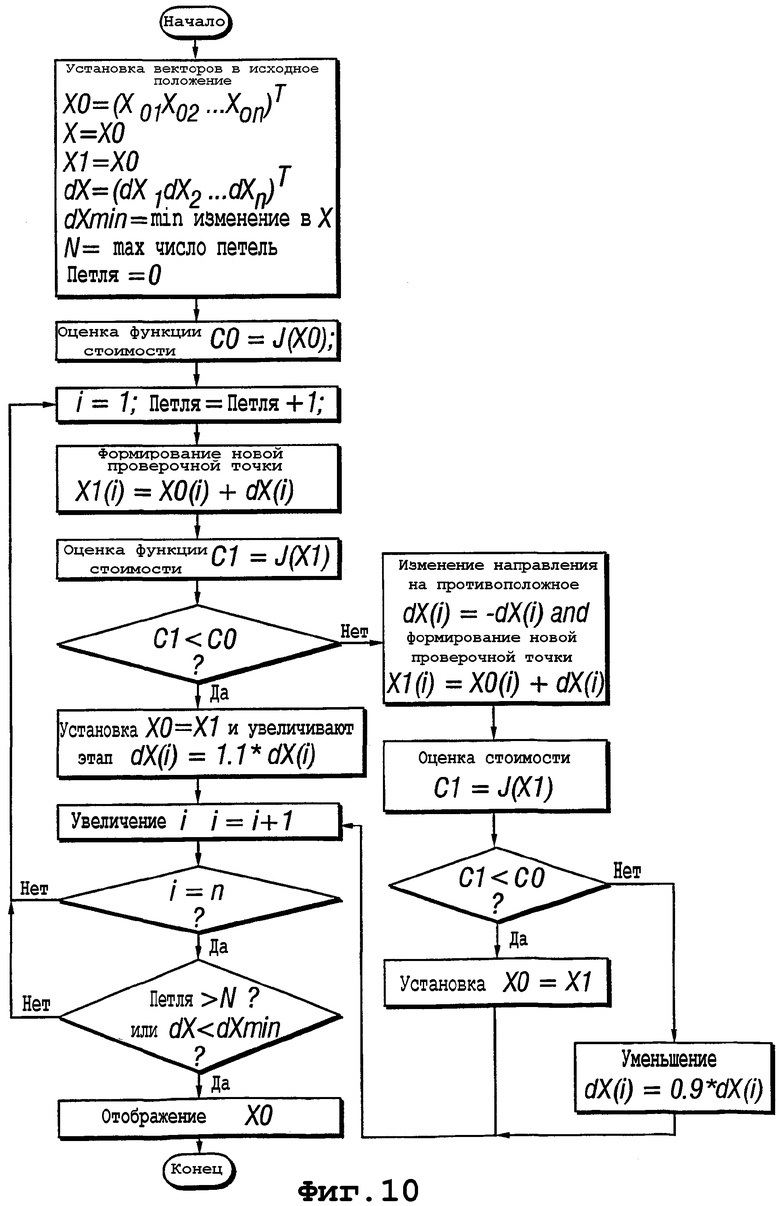
фиг.10 - блок-схему действия алгоритма Хука-Дживза.
Описание предпочтительных вариантов выполнения изобретения
Согласно предпочтительному варианту осуществления, по меньшей мере, одна пара подвижного мостового транспортера (ПМТ) и забойного цепного конвейера системы непрерывной откатки автоматизированы таким образом, что прохождение по подземной шахте возможно при небольшом объеме участия и управления оператором или без него. Согласно одному из вариантов осуществления автоматизирование обеспечивают за счет использования совокупности датчиков, устанавливаемых на каждом ПМТ, и электронного контроллера, который принимает данные от соответствующих датчиков, обрабатывает данные с помощью одного или нескольких алгоритмов и затем направляет команды в двигательный механизм и механизм регулирования высоты ПМТ. Хотя согласно предпочтительному варианту осуществления каждый ПМТ может действовать (идти по маршруту) независимо от другого ПМТ в узле комбайна непрерывного действия, предполагается, что каждый контроллер ПМТ может обмениваться данными и действовать совместно с контроллерами других ПМТ.
Приводимая в качестве примера пара подвижного мостового транспортера 10 и забойного цепного конвейера 30 показана на фиг.1. ПМТ 10 перемещается с помощью пары гусеничных узлов 12. Поскольку левый и правый гусеничные узлы 12 работают независимо друг от друга, поэтому повороты выполняют на разной скорости соответствующих гусеничных узлов. Каждый ПМТ содержит задний охватывающий хомут 14 и передний охватываемый хомут 18. Охватывающий хомут 14 также ограничен отверстием 16 для вмещения соединительного штыря 38 охватываемого хомута 36 заднего забойного цепного конвейера. Соответственно, охватываемый хомут 18 содержит соединяющий штырь 20 для подсоединения к отверстию 34 охватывающего хомута 32 продвигающегося забойного цепного конвейера 30. Согласно одному из вариантов осуществления данного изобретения охватываемый хомут 18 прикреплен к выполненной с возможностью скользящего перемещения тележки 22, установленной на направляющей 28, и является ее частью. Охватываемый хомут 18 выполнен с возможностью подъема или снижения относительно тележки 22 с помощью обычных известных средств, таких как гидропривод 24, тем самым поднимая или снижая соответствующий забойный цепной конвейер 30. Аналогично охватывающий хомут 14 также выполнен с возможностью подъема и снижения, тем самым поднимая и снижая задний забойный цепной конвейер 30 (не изображен) при необходимости и при наличии соответствующего оборудования. Нужно отметить, что местонахождение охватываемого хомута 18 и охватывающего хомута 32 может быть противоположным тому, которое изображено на фиг.1. Например, охватывающий хомут 32 можно расположить на ПМТ 10, и охватываемый хомут 18 можно расположить на забойном цепном конвейере 30.
Общий вид узла непрерывной добычи и откатки в подземной шахте изображен на фиг.2. Комбайн 40 непрерывного действия производит выемку неотбитого угля или другого соответствующего материала 42, заштрихованного на фиг.2, из шахты. Ранее разработанные части шахты 44 изображены на фиг.3 незаштрихованными. Комбайн 40 непрерывного действия подает добытый материал в первый ПМТ 10А. Затем материал транспортируют в следующий ПМТ 10В с помощью первого забойного цепного конвейера 30А, расположенного между ПМТ 10А и 10В и прикрепленного к ним. В зависимости от проходимого расстояния для удлинения узла непрерывной добычи и откатки можно обеспечить дополнительные ПМТ 10С, 10D и 10Е и забойные цепные конвейеры 30В, 30С, 30D, 30Е, например. Фиксированная и удлиняемая конвейерная лента 50 прикреплена к заднему забойному цепному конвейеру 30Е, и она выдает добытый материал на соответствующее курсирующее транспортное устройство, на конвейерную систему или другое распределительное средство из шахты.
При перемещении комбайна непрерывного действия вперед при выполнении горных работ ПМТ 10А, 10B, 10C, 10D, 10Е и забойные цепные конвейеры 30А, 30B, 30C, 30D, 30E также перемещаются вперед. Аналогично, ПМТ и забойные цепные конвейеры перемещаются назад, чтобы комбайн непрерывного действия смог выйти из разрабатываемого участка. В обычной системе непрерывной откатки каждый ПМТ 10А, 10B, 10C, 10D, 10Е имеет водителя, чтобы управлять ПМТ и присоединенными забойными цепными конвейерами при продвижении по шахте, в частности, чтобы объезжать целики 60 недобытого материала. Целики 60 и прочий недобытый материал 42 по существу определяют стенки 62 шахты, через которые должна проходить система непрерывной откатки. Фиг.3 схематически иллюстрирует общую компоновку датчиков согласно предпочтительному варианту осуществления данного изобретения. ПМТ 10В и забойный цепной конвейер 30В иллюстрированы вместе с частичным видом забойного цепного конвейера 30А и ПМТ 10С. В соответствии с приводимым ниже более подробным описанием автоматизированная система непрерывной откатки согласно данному изобретению применяет три типа компонентов датчика. Первыми компонентами датчика являются средства 70 измерения расстояния. Средство 70 измерения расстояния измеряет расстояние между ПМТ и прилегающей стенкой шахты. По меньшей мере, применяют одно средство измерения расстояния, но предпочтительно использовать несколько средств. Обнаружено, что оптимальным расположением для точных измерений является размещение средств измерения расстояния на продольных сторонах ПМТ. Согласно предпочтительному осуществлению данного изобретения в качестве средства измерения расстояния используются инфракрасные лазерные дальномерные сканеры SICK (SICK Optik, Inc., Германия). Другими бесконтактными устройствами измерения расстояния являются ультразвуковые устройства измерения расстояния, выпускаемые компанией Massa Technologies, Hingham, MA; эти устройства также можно устанавливать на продольных сторонах ПМТ в нескольких местоположениях. Прочие альтернативные осуществления средств измерения расстояния включают в себя датчики контактного типа, которые выполняют те же измерения, такие как пассивные или подвижные контактные датчики, которые определяют присутствие стенки шахты средствами осязания, либо замыкая местную электрическую цепь при контакте. В этих электроконтактных осуществлениях напряжение и ток должны строго выдерживаться в пределах действующих норм техники безопасности подземных работ. Специалисту в данной области техники будет понятно, что для подвижных или пассивных контактных датчиков требуется средство обнаружения относительного усилия или вращающего момента на таком контактном датчике как условие, которое проводит различие между свободным перемещением контактного датчика в воздухе и перемежающимся или устойчивым контактом с более жесткой стенкой шахты.
Вторым типом датчика, используемого в автоматизированной системе непрерывной откатки согласно данному изобретению, является средство 76 определения высоты для измерения просвета между ПМТ 10 с присоединенными забойными цепными конвейерами 30, либо полом или кровлей прохода шахты, либо тем и другим вместе. Для каждого ПМТ 10 предпочтительно требуется только одно средство 76 определения высоты, но для избыточности могут использоваться несколько средств 76 определения. Согласно приводимому ниже более подробному описанию при реагировании на измерения, получаемые средствами определения высоты, высоту прикрепленных забойных цепных конвейеров 30 по отношению к кровле шахты можно регулировать путем гидравлического подъема или снижения тележки 22 с помощью гидропривода 24 либо к высоте юбки самих ПМТ 10 с помощью гидроприводов 26, установленных на узлах 12 привода, как схематически изображено на фиг.1.
Согласно предпочтительному осуществлению данного изобретения средством определения высоты является, например, такое ультразвуковое устройство измерения расстояния, которое выпускает компания Massa Technologies, Hingham, MA. Из известного уровня техники хорошо известно, что эти устройства передают ультразвуковой сигнал, который отражается от соответствующей поверхности, кровли или пола шахты и по которому вычисляют расстояние между поверхностью и датчиком. Датчик может определять это расстояние или просвет по временному принципу, например, чаще одного измерения в секунду. Определено, что частота свыше 100 измерений в секунду дает гораздо больше данных, чем это необходимо для надежного вождения на имеющихся скоростях транспортных устройств порядка одного фута в секунду.
Согласно альтернативному варианту осуществления для определения и регулирования высоты используется концевой выключатель, к которому прикреплен короткий гибкий трос. Ближний конец троса жестко прикреплен к пусковому рычагу концевого выключателя. Дальний конец троса проходит под конвейером и свисает на полу шахты при перемещении транспортного средства вперед или назад. Если трос не должен касаться пола, то его относительная ориентация будет почти вертикальной, и это состояние определяется концевым выключателем. Концевой выключатель, в свою очередь, дает гидравлическому регулирующему клапану подъемника команду понизить пролет конвейера. Если трос тянется по полу, то его относительная ориентация будет далека от вертикальной, и это состояние аналогично определяется концевым выключателем. Концевой выключатель, в свою очередь, дает гидравлическому регулирующему клапану команду поднять пролет конвейера. Специалисту в данной области техники будет очевидно, что концевой выключатель предпочтительно будет иметь зону нечувствительности "бездействия" в отношении регулирования подъема, в которой трос в незначительной степени тянется по полу шахты и его относительная ориентация будет почти вертикальной.
В ПМТ согласно фиг.1 на его переднем и заднем хомутах 18, 14 прикреплены штырь 20 или гнездо 16, которые соединены с соответствующим гнездом 34 или штырем 38 забойного цепного конвейера 30. Эти штыри или гнезда обеспечивают угловое азимутальное движение при значении угла свыше 180 градусов, свободу углового возвышения от 10 до 20 градусов и свободу углового крена в несколько градусов. Как указано выше, ПМТ содержит выполненную с возможностью скользящего движения тележку 22, на которой установлено одно из соединений "штырь-гнездо" с забойным цепным конвейеров. Как указано выше при описании фиг.1, эта тележка прикреплена с возможностью скользящего движения к направляющей 28. Движение этой тележки обеспечивает свободу продольного скользящего движения для соединения между одним забойным цепным конвейером и ПМТ, обычно на наружном конце ПМТ. Как показано на фиг.3, такое средство 72 определения положения тележки, как линейный потенциометр, установлен на каждом ПМТ 10, чтобы определять и регистрировать относительное перемещение тележки 22 на направляющей 28, чтобы, когда будет достигнуто значение заранее определенного измерения, контроллер 80 ПМТ смог определить, что система непрерывной откатки движется сейчас вперед или назад, и сможет определить ее скорость. То есть, если первый ПМТ 10А движется вперед, то он будет двигать задний забойный цепной конвейер 30А вперед. Задний забойный цепной конвейер 30А будет продвигающимся забойным цепным конвейером по отношению ко второму ПМТ 10В и будет соединен с тележкой 22, которая относится к ПМТ 10В. Конвейер 30А будет продвигать тележку 22 вперед по направляющей 28, перемещение которой будет определяться линейным потенциометром 72. Затем потенциометр может послать сигнал контроллеру 80 (фиг.4) о том, что требуется движение вперед.
Степени свободы между ПМТ и соединенным с ним забойным цепным конвейером являются существенно важными для связи составных частей системы непрерывной откатки, при сохранении свободы объезжать целики и учитывать точные скорости и положения каждого ПМТ для их несинхронности в диапазоне, достаточном для учета возможностей оператора, или, в случае данного изобретения, компьютера, для вождения ПМТ. Если углы между ПМТ и присоединенными забойными цепными конвейерами слишком большие, то существует опасность того, что вся система непрерывной откатки "сложится", или ее часть перевернется. Местоположение забойного цепного конвейера 30 косвенно определяют путем определения угла между ПМТ 10 и забойным цепным конвейером 30 в соответствующих штыревых-гнездовых соединениях. Поэтому третий тип датчика, применяемого в автоматизированной системе непрерывной откатки согласно данному изобретению и иллюстрируемого на фиг.3, является средством 74 измерения угла, которое определяет угол между ПМТ 10 и присоединенным забойным цепным конвейером 30. Поскольку ПМТ 10 обычно имеет присоединенные к нему передний и задний забойные цепные конвейеры 30, то каждый ПМТ будет содержать два средства 74 измерения угла. В предпочтительном варианте осуществления данного изобретения средством 74 измерения угла является угловой потенциометр или потенциометр вращения, известный из уровня техники. Обычное гибкое соединение между потенциометром и точкой прикрепления на штыре предусматривает возможность угловых движений вне плоскости. Насколько это известно автору, этот признак отсутствует на каких бы то ни было соединениях горного оборудования. Помимо этого, наиболее распространенный способ прикрепления таких связанных друг с другом составных частей имеет большие просветы между по существу цилиндрическим штырем и по существу скошенным гнездом. Сферическое соединение, обычно используемое в трейлерах, не будет соответствовать этой цели, поскольку здесь удобного метаположения для потенциометра не имеется. Данное изобретение предпочтительно предусматривает установку такого потенциометра в сферической конструкции соединения, чтобы свести к минимуму боковые движения для возможности применения обычного гибкого соединения.
В соответствии с приводимым ниже подробным описанием для автоматизации элементов системы непрерывной откатки (ПМТ 10 и забойные цепные конвейеры 30) получаемые от соответствующих датчиков данные необходимо собирать, объединять и обрабатывать, чтобы система непрерывной откатки могла перемещаться относительно комбайна 40 непрерывного действия и чтобы забойные цепные конвейеры смогли снижаться сообразно расстоянию между полом и кровлей шахты. Фиг.4 иллюстрирует общую схему входных/выходных сигналов в соответствии с данным изобретением.
Действием системы непрерывной откатки согласно данному изобретению в основном управляет электронный контроллер 80. Поскольку каждый ПМТ 10 может действовать и предпочтительно действует независимо от остальных ПМТ в цепи откатки, поэтому каждый ПМТ 10 имеет собственный контроллер 80. В качестве контроллера 80 в настоящее время в каждом ПМТ предпочтительно используют персональный компьютер. Контроллер ПМТ выполнен на персональном компьютере с операционной системой WINDOWS (Microsoft, Inc., Redmont, Washington), для которого минимально требуется процессор с частотой 200 МГц (Intel, Inc., Santa Clara, California) и ЗУПВ объемом 64 Мегабайт. В качестве средства сбора данных от соответствующих датчиков используют язык графического программирования LABVIEW (National Instruments, Austin, Texas). Все управляющие алгоритмы написаны на языке "С" и составлены в соответствующем формате, который можно вызывать из LABVIEW. Контроллеры на основе ПК осуществляют сообщение с датчиками каждого ПМТ по последовательным или параллельным кабелям. Каждый ПМТ также имеет контроллеры 82, 84 скорости правой и левой гусеницы или системы привода как часть узлов привода гусениц. Контроллеры 82, 84 системы левого и правого привода также содержат платы управления системой привода. Эти платы получают команды скорости от контроллера 80 и осуществляют управление скоростью в замкнутом контуре для гусениц, обеспечивая фактическую скорость гусениц, по возможности наиболее близкую к нужной скорости гусениц, с учетом пробуксовывания и исправления ошибок.
Как правило, данные датчиков принимает контроллер 80 от средства 70 измерения расстояния, средства 76 определения высоты, средства 74 измерения угла. Датчики и контроллер 80 выполнены с возможностью непрерывного контролирования положения ПМТ. В другом варианте при приеме сигнала заранее определенного уровня от линейного потенциометра 72 контроллер 80 получает информацию о том, что идущий вперед забойный цепной конвейер 30А перемещает тележку 22 вперед или назад, поэтому управляемый ПМТ должен переместиться вперед или назад. Согласно приводимому ниже более подробному описанию контроллер 80 обрабатывает принимаемые от датчика данные и вычисляет маршрут хода ПМТ, которым он управляет. Затем контроллер определяет, нужно ли поднять или снизить передний или задний забойный цепной конвейер, или оба конвейера по отношению к расстоянию между полом и кровлей шахты. Затем контроллер направляет сигнал движения платам 88, 90 контроллера привода левого и правого контроллеров 82, 86 привода одного или обоих гусеничных узлов 12. Контроллер 80 также дает сигнал для тележки подняться или снизиться, если это требуется в связи с изменением просвета кровли. Контроллер 80 может также выводить соответствующие данные измерения в пользовательском читаемом формате на дисплей 96. Ручное пользовательское средство 94 управления подключается к контроллеру 80 при необходимости вмешательства человека.
Фиг.5 иллюстрирует блок-схему описываемого выше процесса ввода/вывода данных более подробно. Все порты связи устанавливают в исходное состояние на стадии 100, затем устанавливают в исходное состояние датчики измерения расстояния (лазерные дальномеры SICK) на стадии 102. Также устанавливают в исходное состояние 104 датчики угла и высоты на стадии 104 и платы контроллера системы привода - на стадии 106. Стадии 100, 102, 104, 106 установки в исходное состояние выполняются контроллером 80 в начале работы по добыче. Начиная работы по добыче, контроллер направляет запросы на получение данных о расстоянии у лазерных сканеров и датчиков угла и высоты на стадии 108. Лазерные дальномерные сканеры и датчики выдают запрашиваемые данные и показания в контроллер 80. Исходные данные от датчиков запоминают и преобразуют на стадии 110 в соответствующий формат. Необработанные данные о расстоянии в содержащих числовые матрицы элементах 181 преобразуют в 2×181-матрицу, в которой первый и второй ряды представляют углы и соответствующие измеренные расстояния. Показания угловых и линейных потенциометров преобразуют в углы (градусы) и длину (дюймы/метры), соответственно. Контроллер выводит значащие линии в данных о расстоянии с помощью Алгоритма Определения Линии (АОЛ) на стадии 112. Затем контроллер вычисляет текущее местоположение ПМТ по результатам АОЛ на стадии 114 и применяет систему Глобальных Координат для результатов АОЛ на стадии 116. Маршрут для ПМТ формирует контроллер на стадии 118, а скорости двух гусеничных узлов вычисляют на основании относительной погрешности положения и ориентировании ПМТ относительно маршрута на стадии 120. Далее следует подробное описание стадий 110-120, в частности излагается Алгоритм Определения Линии.
При инициировании ручной коррекции 122 программа управления прекращает свое действие 124. При этом комбайн 40 непрерывного действия и каждый ПМТ содержит аварийный механизм предохранительного стопора. Контроллер запрашивает, был ли задействован аварийный стопор на стадии 126, и если был, то обнуляет команды по скорости гусениц на стадии 128. Затем контроллер направляет команды о скорости гусениц на платы на стадии 130 контроллера привода. ПМТ затем идет в соответствующем направлении, если не сработает аварийный стопор, при этом тогда ход будет нулевым. Последовательность управления затем возвращается к стадии 108 по контуру 132.
Автоматизация хода ПМТ с присоединенными забойными цепными конвейерами должна учитывать несколько физических факторов. Например, местоположение шарниров между ПМТ и присоединенными забойными цепными конвейерами определяет свою геометрию системы непрерывной откатки, и при отсутствии каких-либо других усилий они необходимы, чтобы направлять соответствующие сегменты ПМТ или присоединенного забойного цепного конвейера. Если с ПМТ взаимодействуют значительные усилия, то необходимо компенсирующее управление, чтобы конфигурация направлялась в пределах допусков на максимально возможных скоростях. Влияние силы тяжести и усилий, передаваемых штырем, в работе непосредственно измерить невозможно, но рабочие показатели системы привода ПМТ зависят от них. Для автоматического управления ПМТ также необходимо знать имеющуюся в данный момент скорость (измеряемую по ведущим колесам) и необходимо вычислять нужную скорость на основании, отчасти, текущего и прогнозируемого отклонения от проложенного маршрута. Если предположить, что проложенный маршрут выполняется, но согласно новому правилу управления производится выборка последних данных по конфигурации системы вблизи ПМТ, применяется внутренняя модель прогнозируемого пробуксовывания, и нужная скорость компенсируется с учетом этого пробуксовывания. Предыдущие данные конфигурации системы (положения и углы каждого звена системы транспортных средств) значительно влияют на нужную компенсацию, т.к. могут дать два вида сведений: первый - насколько изменились условия грунта после последнего временного интервала; второй - чувствительность к условиям грунта в связи с текущей конфигурацией. Например, если все углы забойных цепных конвейеров почти нулевые, то боковое пробуксовывание зависит только от силы тяжести, местного наклона и касательного напряжения поверхности. Но если оба угла конвейера будут равны 90о, то соседние ПМТ будут создавать крутящий момент и боковое сдвигающее усилие в отношении данного ПМТ, которые легко подавят эффекты наклона. Контроллер должен учитывать эти факторы и прочие факторы и компенсировать их.
Ход ПМТ/забойного цепного конвейера
Конструирование системы навигации для системы непрерывной откатки осложнено, поскольку система непрерывной откатки имеет много особых характеристик. Например, движение системы непрерывной откатки подчиняется как голономическим, так и неголономическим ограничениям. Помимо этого число степеней свободы системы изменяется в зависимости от конфигурации системы, и модель для гусеничных транспортных средств в системе является очень усложненной. Эти характеристики создают трудности для навигации, сильно усложняя ее.
Основная концепция навигации системы непрерывной откатки в подземных условиях заключается в правильном позиционировании каждого ПМТ на нужном месте и всегда. Для этого каждый ПМТ в системе должен близко следовать виртуальному маршруту, проложенному по полу шахты. Этот виртуальный маршрут формирует планировщик маршрута на основании данных об окружающей местности, определенных, например, лазерными дальномерами. За счет того, что каждый ПМТ может перемещаться независимо в пределах хода тележки, после определения текущего положения каждого ПМТ, система может управлять движением каждого ПМТ таким образом, что он будет близко следовать планированному маршруту и, одновременно, не выйдет из пределов тележки. Поскольку ПМТ могут перемещаться независимо друг от друга, то более эффективным будет применение местного контроллера для каждого ПМТ вместо одного централизованного контроллера для всех ПМТ.
Одним видом информации, которая особо нужна каждой автономной подвижной системе, является текущее положение и ориентирование (ПиО). Поэтому система должна иметь возможность определять свое местоположение на месте своей работы. Согласно данному изобретению данные о расстоянии, получаемые от лазерного сканера, обеспечивают возможность вычисления текущих ПиО данного ПМТ. С помощью Алгоритма Определения Линии (АОЛ) из данных о расстоянии выводят две самые длинные прямые линии с помощью рекурсивного метода разбиения линии. АОЛ работает с данными о расстоянии, получаемыми единовременно от лазерного сканера. Согласно фиг.7 на стадии 202 АОЛ принимает данные о расстоянии, собранные с помощью LABVIEW в виде 2×181-матрицы, где первый и второй ряды представляют углы и измеренные расстояния, соответственно. Поскольку угловое разрешение лазерного сканера установлено на 1°, мы имеем 181 значение расстояния от 0 до 180 градусов. После сбора данных о расстоянии алгоритм на стадии 204 отфильтровывает плохие или ненужные данные о расстоянии путем проверки переднего и заднего углов забойного цепного конвейера с помощью углового потенциометра и отсекает начальные и конечные разделы данных о расстоянии в соответствии с этими углами. За счет этого исключается смешение данных о расстоянии от стенки шахты и системы непрерывной откатки. При этом алгоритм также отбрасывает все данные о расстоянии, согласно которым измеренное расстояние превышает заданное предельное значение, во избежание неверного истолкования данных о расстоянии. Затем на стадии 206 данные о расстоянии разделяют на группы путем проверки разницы значений последовательно измеренных расстояний. Если разница измеренных расстояний превышает заданное пороговое значение, то данные о расстоянии подразделяют в этот момент. Это поможет нам отделить профили разных стенок шахты друг от друга, чтобы они не создавали друг другу помех. После разделения данных о расстоянии на группы для последующего анализирования выбирают самую большую группу, содержащую самую длинную линию.
На стадии 208 алгоритм далее применяет рекурсивный метод разделения линии, чтобы разделить выбранную группу данных о расстоянии на подгруппы. Этот метод наиболее наглядно поясняется на фиг.6. Здесь дана группа точек. Метод начинается с того, что линию, обозначенную на фиг.6 пунктиром, соединяют между первой и последней точками этой группы. Затем вычисляется расстояние от каждой точки в группе до этой линии. Если самое большое расстояние превышает заданное предельное значение, то алгоритм разделяет группу в точке, которая соответствует наибольшему расстоянию от этой линии. Группа теперь разделена на две подгруппы, и ту же самую процедуру (соединение линии между первой и последней точками в каждой подгруппе, вычисление расстояния от каждой точки) далее применяют для обеих остальных групп. Процедуру продолжают, пока заданный предел не будет удовлетворять всем подгруппам. В результате получают четыре группы точек, которые на фиг.6 указаны сплошными линиями. После разделения данных о расстоянии на подгруппы две самые большие подгруппы, представляющие две самые длинные линии в данных о расстоянии, будут выбраны на стадии 210. В этом случае первая и третья группы слева будут выбраны для соответствия линиям. Эти две линии приблизительно представляют весь профиль стенок шахты, охваченных лазерными сканерами в любой момент, и их можно использовать для определения текущих ПиО данного ПМТ в любом цикле управления.
После применения алгоритма нахождения линии контроллер применяет алгоритм определения местоположения, чтобы вычислить и, таким образом, определить ПиО данного ПМТ. Алгоритм сначала устанавливает глобальную систему координат, изображаемую на фиг.8. Угол между двумя ранее полученными линиями определяет местоположение и ориентирование системы координат. Если значение угла превышает заданное пороговое значение, например 160°, то две линии будут формировать прямую линию. В этом случае алгоритм может создать начало системы координат в любом нужном нам месте по одной из этих двух линий, но в предпочтительном осуществлении данного изобретения начало в какой-либо точке помещают по этим двумя линиям как можно ближе к лазерному сканеру для простоты. Ориентирование системы координат определяют, направляя Y-ось в том же направлении, которое имеет угловая биссектриса. С другой стороны, если значение угла меньше заданного порогового значения, то положение начала находится в точке пересечения этих двух линий, а ориентирование можно определить описываемым выше способом.
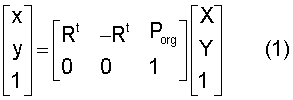
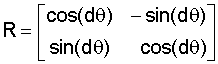
Поскольку данные о расстоянии измеряют в системе координат сканера, поэтому необходимо преобразовать точки от системы координат сканера в глобальную систему координат. Со ссылкой на фиг.8 допустим, что ПиО объекта в глобальной системе координат будет x, у, θ и что dx, dy, dθ являются ПиО глобальной системы координат, выведенной из системы координат сканера. Ориентирование х-оси системы координат dθ определяют как dθ=γ-(π/2) радиан. Поскольку место установки лазерных сканеров на ПМТ известно, поэтому также известен геометрический центр ПМТ относительно каждого датчика. Преобразование координат для ПиО данного объекта из системы координат сканера в глобальную систему координат можно выполнить в соответствии со следующими уравнениями:
и

где
 ,
,
 ,
,
X, Y,  - ПиО системы координат сканера.
- ПиО системы координат сканера.
Поскольку точное местоположение лазерного сканера на ПМТ известно, ПиО центра геометрии данного ПМТ в системе координат сканера также известны. Значение dx, dy, dθ также известно из предыдущего вычисления. Поэтому местоположение ПМТ в отношении глобальной системы координат можно определить по уравнениям (1) и (2).
После определения местоположения для автоматизирования ПМТ затем необходимо определить его направление хода. Планирование маршрута в подвижной робототехнике является одной из самых сложных проблем. Одно из решений заключается в решении проблемы планирования маршрута исходя из концепции пространства конфигурации с максимальным просветом между забойными цепными конвейерами и стенками шахты в качестве оптимального критерия. Но описываемое подробно ниже решение согласно данному изобретению учитывает множественные оптимальные критерии.
Как показано на фиг.9, обычные повороты γ в шахте составляют 90, 120 и 135 градусов, соответственно. Небольшие изменения значений этих углов происходят из-за ошибок направляющей системы комбайна 40 непрерывного действия. Средняя ширина U шахтного прохода обычно равна 20 футам. По значениям γ и U можно определить данный тип поворота. Одна из функций стратегии планирования маршрута заключается в том, что для любого данного габарита системы непрерывной откатки (СНО) стратегия планирования маршрута может формировать самый надежный маршрут, по которому должен следовать каждый ПМТ в СНО - пунктирная линия 300. Для этого разработан алгоритм планирования маршрута. Входными данными для этого алгоритма являются габариты шахтового прохода γ и U и СНО, обе конечные точки маршрута и уклоны на обеих конечных точках. На основании этих входных данных алгоритм поиска формирует ряд многочленных кривых четвертой степени, маршрут для ПМТ, удовлетворяющий условиям конечных точек, и оценивает значение функции стоимости сформированной многочленной кривой. Функция стоимости J определяется по следующей формуле:

где w1, w2, w3 и w4 - весовые множители,
а - угол между передним ПМТ и забойным цепным конвейером,
β - угол между задним ПМТ и забойным цепным конвейером,
d - минимальный просвет между забойным цепным конвейером и стенками,
νerr - максимальная допустимая ошибка скоростей гусениц,
s - длина дуги маршрута,
L - общая длина маршрута.
Цель поиска заключается в том, чтобы найти маршрут, который сводит к минимуму функцию стоимости. Этот алгоритм использует метод оптимизации, называемый "метод Хука и Дживза". Он исследует область поиска, запоминает направление поиска, дающее минимальное значение функции стоимости на каждой итерации. Поиск прекращают, когда разница между значением функции стоимости на данной итерации и предыдущей итерации меньше заданного числа или когда число итераций превышает некоторое предельное значение. Блок-схема метода Хука-Дживза представлена на фиг.10, где х0, х1, ... хn представляют описываемые ниже коэффициенты маршрута. Функция стоимости интерпретируется в том смысле, что углы между каждым сегментом СНО нужно свести к минимуму, то есть расположение СНО должно быть по возможности прямым, чтобы СНО не сложилась. Наоборот, просвет забойного цепного конвейера должен быть максимальным по всему повороту, чтобы исключить столкновение. При этом планированный маршрут должен иметь значительный допуск погрешности для следования каждого ПМТ, т.е. чтобы маршрут позволял иметь ПМТ значительную погрешность в управлении скорости гусеницы в целях завершения поворота. В этом контексте слово "завершение" означает, что система делает повороты, не сталкиваясь при этом со стенками.
При оценке стоимости каждой многочленной кривой-кандидата пара ПМТ перемещается по сформированному маршруту точно, при этом длина забойного цепного конвейера отделяет их друг от друга. Полная длина маршрута подразделяется на мелкие этапы. Каждый этап продвижения ПМТ, значения а, β и d просто определяются геометрическими средствами, но значение verr можно получить для каждого ПМТ только компьютерным моделированием. Это моделирование производится в основной прикладной программе алгоритма поиска. Сначала вычисляются скорости гусеницы ПМТ для следующего цикла управления в текущей конфигурации ПМТ. Эти скорости называются номинальными скоростями, т.е. скоростями, которые ПМТ должен соблюдать точно, чтобы обеспечить достижение ПМТ'ом следующей конфигурации, находящейся на маршруте после завершения одного цикла управления. Но для ПМТ невозможно точно выдерживать номинальные скорости в соответствии с командой. Имеется несколько факторов, таких как пробуксовывание и ошибки управления, которые создают ошибку номинальных скоростей. Эта ошибка скорости моделируется как процент номинальной скорости. Для вычисления фактических скоростей ПМТ в течение одного цикла управления используют следующие уравнения:
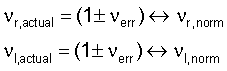
Двумя исходными предположениями являются следующие: verr имеет одинаковое значение для обеих гусениц; νr,actual и νl,actual всегда постоянные на протяжении одного цикла управления. Значение νerr имеет всегда положительное значение без верхнего предела. Моделирование начинает значение νerr с нуля и вычисляет суммарное движение ПМТ в одном цикле управления. Затем моделирование проверяет, имеется ли столкновение между ПМТ и стенками шахты. Если столкновения не имеется, то моделирование продолжает увеличивать значение νerr и прекращает это увеличение, если происходит столкновение. Значение νerr, которое обусловливает столкновение, является максимальной допустимой ошибкой в управлении скоростью в данной конфигурации ПМТ. Суммируя все квадратичные весовые значения as, βs и ds и νerr по всему маршруту-кандидату, можно получить стоимость каждого маршрута.
В случае поворота в 90 градусов маршрут начинается с середины одного прохода в другой. Это позволяет соединить данный маршрут с прямыми маршрутами на обеих сторонах. Коэффициенты уравнений этого маршрута шириной 20 и 22 фута даны в таблице вместе с коэффициентами маршрута для поворотов величиной 120 и 135 градусов.
где y=ax2+bx+c.
Специалисту в данной области техники будет ясно, что представленное выше квадратичное уравнение дает решение при данных коэффициентах маршрута. Хотя это уравнение определенно недостаточно для обеспечения надлежащего планирования маршрута, с введением большего числа коэффициентов можно получить более точный маршрут. Нужно отметить, что с увеличением числа используемых коэффициентов требуется большее количество времени вычисления. Поэтому наиболее предпочтительно использование многочленного уравнения четвертого порядка, например, в следующем виде:

Весь маршрут каждого ПМТ будет состоять из чередующихся поворотов и прямых отрезков в зависимости от местоположения ПМТ в шахте, но имеется исключение для особого типа, так называемого "S"-поворота, который считается труднейшим. Маршрут для "S"-поворота состоит из двух поворотов, сочлененных друг с другом. Поскольку оба конца "S"-поворота не расположены посередине проходов, оба конца "S"-поворота должны соединяться с прямыми отрезками. Поэтому невозможно, чтобы один "S"-поворот непосредственно следовал после еще одного "S"-поворота. Тем не менее, это происходит в 90-градусной шахте, так как 120- и 135-градусные шахты не имеют достаточного места, чтобы "S"-поворот начинался и заканчивался посередине шахтного прохода.
Поскольку для определения оптимального маршрута алгоритму поиска требуется много часов, поэтому выполнить планирование маршрута в неавтономном режиме невозможно. Эту проблему решают путем проведения автономного планирования маршрута для возможных типов поворотов и создают справочную таблицу с коэффициентами маршрута, соответствующими каждому определенному повороту (как в таблице). После того, как контроллер ПМТ определит тип данного поворота, контроллер сможет немедленно вычислить соответствующие коэффициенты маршрута по справочной таблице путем интерполяции. Хотя маршрут, сформированный таким методом, является несколько субоптимальным по сравнению с оперативными вычислениями, результаты испытательного прогона показывают сведенное к минимуму ухудшение показателей системы при ее прохождении по моделированной шахте.
До этого момента ПМТ знает свои текущие ПиО и маршрут, по которому он должен следовать, данный ПМТ затем должен определить, как ему попасть в нужное место назначения. Алгоритм отслеживания маршрута вычисляет обе скорости гусеничного узла для ПМТ, и в результате этого ПМТ может точно следовать маршруту. Хотя имеется большая литература по управлению следованием по маршруту двухколесных роботов, которые кинематически идентичны гусеничному транспортному средству, данное изобретение реализует алгоритм следования маршруту, предложенному Aguilar et al. ("Robust Path-Following Control with Exponential Stability for Mobile Robots", Proc. of the 1998 IEEE Int. Conf. on Robotics and Automation, Leuven, Belgium, May 1998).
Имеются два параметра уе и θе, которые в любой данный момент необходимы в качестве входных данных для контроллера ПМТ для следования маршруту. уе - кратчайшее расстояние от центра ПМТ до маршрута и θе - ошибка ориентирования, измеренная от линии, касательной по отношению к маршруту. Зная скорость вперед или назад, ν, угловую скорость ПМТ, можно вычислить по следующему уравнению:

где α1, α2 - постоянные коэффициенты усиления контроллера, которые необходимо настроить для приема нужного ответного действия ПМТ в отношении следования.
Скорость ν прямо взаимосвязана с допустимыми поперечными расстояниями на тележке ПМТ и непосредственно позади тележки ПМТ в направлении движения. Сравнивают оба поперечных расстояния тележки и выбирают меньшее. Это расстояние можно определить как "прохождение".
Скорость движения вперед или назад можно вычислить следующим образом:
где ν - имеет положительное/отрицательное значения при движении вперед/назад, соответственно,
Т - период цикла управления, сек,
 тележка - скорость тележки по данным, полученным от линейного потенциометра.
тележка - скорость тележки по данным, полученным от линейного потенциометра.
Затем можно определить скорости правой и левой гусениц:
где В - расстояние между гусеницами.
Алгоритм следования маршруту, включая алгоритм планирования маршрута, предпочтительно реализуют в обычном компьютерном языке, таком как C. Также предпочтительно объединить оба алгоритма в одной программе, поскольку они оба во многом пользуются общей информацией.
Высота забойного цепного конвейера
В соответствии с данным изобретением высота переднего или заднего конвейерного продления регулируется путем непрерывной обработки измерений расстояния, выполняемых датчиком определения высоты, путем вычисления разницы по данной установленной точке и путем применения пропорции этой разницы, чтобы регулировать открытие гидравлического регулирующего клапана 24 (фиг.1). Обработка заключается в том, что сравнивают измерения расстояния с рядом предыдущих измерений, вычисляют скользящее среднее по многим циклам, отбрасывая посторонние точки данных, и вычисляют среднее значение по меньшему числу циклов. В результате получают достоверное измерение просвета в потенциально затрудненных условиях сбора данных, при этом сводя к минимуму задержку, возникающую при применении обычного фильтра нижних частот. Специалисту в данной области техники будет понятно, что для описываемого предпочтительного осуществления можно использовать многие методы аналогового и цифрового фильтрования.
Установленную точку(и) для регулирования подъема предпочтительно определяет оператор шахты, и она используется процессором измерения в качестве входных данных. В случае измерения одного расстояния, например только расстояния от пола, эта установленная точка определяет значение нужного расстояния, ниже которого возвышение определяется как возрастающее, и ниже которого возвышение определяется как спадающее. В случае измерения двух расстояний, например расстояния от кровли и от пола, эти установленные точки определяют зону нечувствительности "бездействия" для регулирования подъема, и также целевое значение расстояния, ниже которого возвышение определяется как возрастающее, и ниже которого возвышение определяется как спадающее. Также целесообразно использовать двойные измерения для избыточности путем коммутации в измерительном процессоре, чтобы определить, какой именно из сигналов измерения является действительным, или действительными являются оба сигнала. Специалисту в данной области техники будет ясно, что пропорцию измеренного расстояния от установленной точки нужно выбирать такой, чтобы получить почти критически ослабленный отклик. Из уровня техники хорошо известны такие методы, как пропорционально-интегрально-дифференциальное регулирование.
Специалистам в данной области техники будет очевидно, что помимо описываемых здесь вариантов осуществления в способе согласно данному изобретению можно осуществить прочие модификации и изменения в рамках объема, концепции и раскрытия данного изобретения. Поэтому авторы подразумевают, что описание данного изобретения следует рассматривать как иллюстративное, и изобретение ограничивается только прилагаемой формулой и ее эквивалентами.
Изобретение относится к системам автоматизированного управления транспортным средством, предназначенным для использования в подземных условиях, и способам управления транспортными средствами. Способ управления основан на определении маршрута транспортного средства по расстояниям от транспортного средства до стенки шахты, измеренным датчиками транспортного средства, угловой скорости последнего и скоростей левого и правого колес или гусениц и ускорении транспортного средства с помощью контроллера для направления к ближайшей точке маршрута. Система для управления содержит средство измерения расстояния и средство углового положения для определения положения подвижного мостового транспортера (10) и углового положения присоединенных забойных цепных конвейеров (30). На каждом подвижном мостовом транспортере (10) входные данные от различных датчиков принимает электронный контроллер для вычисления положения и ориентирования мостового транспортера (10) и забойных цепных конвейеров (30). Контроллер планирует оптимальный маршрут перемещения и вычисляет скорость перемещения для каждого независимо действующего гусеничного узла на мостовом транспортере. Изобретение обеспечивает точное определение положения системы транспортеров. 4 н. и 12 з.п. ф-лы, 10 ил., 1 табл.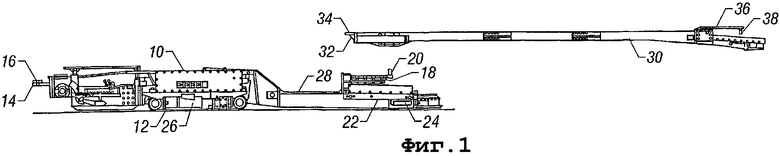
получают первую совокупность данных о расстоянии от транспортного средства до прилегающей стенки шахты, измеренном датчиком, расположенным на левой стороне транспортного средства;
получают вторую совокупность данных о расстоянии от транспортного средства до прилегающей стенки шахты, измеренном датчиком, расположенным на правой стороне транспортного средства;
определяют для каждой совокупности данных о расстоянии самую большую группу, определяемую последовательными расстояниями, имеющими разницу менее заданного значения;
разделяют для каждой совокупности данных о расстоянии самую большую группу на подгруппы с помощью рекурсивной методики разбиения линии, при этом каждая подгруппа определяет линию;
выбирают для каждой совокупности данных о расстоянии две подгруппы, определяющие две самые длинные линии, представляющие два самых больших расстояния от транспортного средства до стенки шахты, при этом расстояния от транспортного средства до стенки шахты на каждой стороне транспортного средства представлены соответствующими выбранными подгруппами;
определяют систему координат на основании двух самых длинных линий;
определяют ширину маршрута между стенками шахты вблизи транспортного средства;
выбирают из таблицы, составленной на основании значений ширины шахтного прохода и углов поворота шахты, многочленную кривую, которая сводит к минимуму функцию стоимости, в результате чего выбранная многочленная кривая представляет маршрут, обеспечивающий наибольшую вероятность того, что транспортное средство и передняя или задняя конструкции не столкнутся со стенками шахты;
определяют точку на многочленном маршруте, имеющую кратчайшее расстояние до центра транспортного средства;
определяют угол между продольной осью транспортного средства, измеренный от линии, касательной к ближайшей точке;
определяют кратчайшее расстояние из двух расстояний хода;
определяют скорость хода, требуемую для транспортного средства, чтобы пройти кратчайшее расстояние хода в течение периода цикла управления;
определяют, исходя из скорости хода, угловую скорость транспортного средства к ближайшей точке;
определяют скорость левого и правого колес или гусениц на основании скорости хода и угловой скорости;
ускоряют транспортное средство с помощью контроллера в соответствии с левой и правой скоростями, в результате чего транспортное средство направляется к ближайшей точке по многочленному маршруту.
получают данные о расстоянии от датчика на транспортном средстве до прилегающей стенки шахты, измеренном датчиком, расположенным на транспортном средстве,
определяют самую большую группу, определяемую последовательными расстояниями, имеющими разницу меньшую, чем заданное пороговое значение,
разделяют самую большую группу на подгруппы с помощью рекурсивного метода разбиения линии, при этом каждая подгруппа представляет собой линию,
выбирают подгруппу, которая определяет самую длинную линию, представляющую собой самое большое расстояние от транспортного средства до стенки шахты, в результате чего расстояние от транспортного средства до стенки шахты представлено выбранной подгруппой.
получают первую совокупность данных о расстоянии от транспортного средства до прилегающей стенки шахты, измеренном датчиком, расположенным на первой стороне транспортного средства;
получают вторую совокупность данных о расстоянии от транспортного средства до прилегающей стенки шахты, измеренном датчиком, расположенным на второй стороне транспортного средства;
определяют для каждой совокупности данных о расстоянии самую большую группу, определяемую последовательными расстояниями, имеющими разницу менее заданного порогового значения;
разделяют для каждой совокупности данных о расстоянии самую большую группу на подгруппы с помощью рекурсивной методики разбиения линии, при этом каждая подгруппа определяет линию;
выбирают для каждой совокупности данных о расстоянии подгруппу, которая определяет самую длинную линию, при этом внешние условия шахты представлены выбранной подгруппой из первых и вторых данных о расстоянии.
определяют ширину лабиринта между стенками вблизи транспортного средства;
выбирают из таблицы, составленной на основании значений ширины шахтного прохода и углов поворота в градусах, многочленную кривую, которая сводит к минимуму функцию стоимости, в результате чего выбранная многочленная кривая представляет маршрут, обеспечивающий наибольшую вероятность того, что транспортное средство и передняя или задняя конструкции не столкнутся со стенками лабиринта.
формируют многочленную кривую для лабиринта с первой шириной шахтного прохода и первым углом поворота исходя из параметров, представляющих допустимое положение и ориентирование транспортного средства и задней и передней конструкций, и исходя из совокупности произвольных коэффициентов маршрута;
повторяют указанное формирование несколько раз, каждый раз с другой совокупностью произвольных коэффициентов;
определяют коэффициенты маршрута многочленной кривой с минимальной функцией стоимости;
запоминают коэффициенты кривой, представляющие сведенную к минимуму функцию стоимости, и соответствующих первых ширины шахтного прохода и угла поворота,
повторяют указанные стадии для других значений ширины шахтного прохода и угла поворота, в результате чего формируют таблицу, имеющую коэффициенты шахтного прохода, представляющие сведенную к минимуму функцию стоимости для данных значений ширины шахтного прохода и угла поворота.
оценивают сведенную к минимуму функцию стоимости, если углы между транспортным средством и соседними конструкциями минимизированы;
оценивают сведенную к минимуму функцию стоимости, если просветы между конструкциями и лабиринтом на протяжении поворота максимизированы;
оценивают сведенную к минимуму функцию стоимости, если допуски погрешности для транспортного средства при следовании по кривой максимизированы.
| US 4465155 A1, 14.08.1984 | |||
| US 5999865 A1, 07.12.1999 | |||
| US 5751211 A1, 12.05.1998 | |||
| ВЫЕМОЧНАЯ МАШИНА ДЛЯ ОДНОВРЕМЕННОЙ ОТБОЙКИ И ПОГРУЗКИ УГЛЯ | 1997 |
|
RU2127808C1 |

