Предпосылки к созданию изобретения
Настоящее изобретение относится к приводу промышленной машины.
Сущность изобретения
Промышленные машины (например, машины, применяемые в горнодобывающей промышленности), такие как валковые дробилки или валковые измельчающие устройства применяются для изменения размера материала (например, добытого материала) в горнодобывающей промышленности и в промышленности переработки материалов. Валковая дробилка - это устройство, которое содержит вал, установленный в подшипниках на раме, и включает один или более инструмент, который физически взаимодействует с материалом (например, камнем, углем и пр.) для уменьшения размера материала до требуемого и/или заранее определенного размера частиц. Такое устройство может относиться к разным типам валковых дробилок, например, к дробилкам-питателям, двухвалковым дробилкам, одновалковым дробилкам и т.п. Материал подается в дробилки разного типа, например, скребковым конвейером (как в дробилке-питателе) или под действием силы тяжести (как в двухвалковых дробилках и одновалковых дробилках) и подвергается дроблению между измельчающими валами (например, в двухвалковых дробилках) или между валом дробилки и рамой (в одновалковых дробилках).
Валковые дробилки приводятся в действие, например, одним или более двигателем, приводящим во вращение вал двигателя и соединенным с шестеренчатым редуктором для создания фиксированной частоты вращения вала валковой дробилки. Сила, создаваемая валом валковой дробилки для размерной обработки, является функцией частоты вращения вала валковой дробилки и вращающейся массы приводного вала двигателя и вала валковой дробилки. Эта сила концентрируется на инструментах валковой дробилки (например, дробильно-разрушающих устройствах) так, чтобы эта сила прилагалась к материалу для измельчения материала до требуемого размера частиц.
Варианты описываемого здесь изобретения относятся к промышленной машине и приводу или контроллеру промышленной машины. Контроллер сконфигурирован для изменения частоты вращения вала валковой дробилки за счет изменения частоты вращения двигателя (например, в диапазоне приблизительно ±15% от синхронной частоты вращения двигателя). При манипуляциях частотой вращения вала валковой дробилки, в валковой дробилке снижается износ инструмента (например, износ дробильно-разрушающего устройства), увеличивается срок службы инструмента, сокращаются простои, снижается потребление энергии, происходит более точная размерная обработка и появляется возможность динамически изменять размер готового материала в пределах некоторого диапазона величин.
Эти преимущества можно реализовать без перепроектирования валковой дробилки или дробильного инструмента (например, дробильно-разрушающего устройства). Контроллер принимает и использует сигналы, полученные от датчиков, и различные способы регулирования, чтобы отрегулировать или изменить частоту вращения двигателя для соответственного регулирования частоты вращения вала валковой дробилки.
В одном варианте согласно настоящему изобретению предлагается промышленная машина, которая содержит двигатель дробилки, вращающийся с некоторой частотой, вал дробилки, конвейер, датчик и контроллер. Вал дробилки механически соединен с выходным валом двигателя дробилки, и вал дробилки содержит множество инструментов, выполненных с возможностью дробить материал. Конвейер сконфигурирован для транспортировки материала через промышленную машину. Датчик сконфигурирован для генерирования сигнала, связанного с некоторым параметром двигателя дробилки. Контроллер сконфигурирован для приема сигнала от датчика, для определения величины параметра двигателя дробилки на основе принятого сигнала, для сравнения величины параметра двигателя дробилки с пороговой величиной, и для генерирования управляющего сигнала для изменения частоты вращения двигателя дробилки на основе сравнения величины параметра двигателя дробилки с пороговой величиной.
В другом варианте согласно настоящему изобретению предлагается способ управления промышленной машиной. Способ содержит этапы, на которых принимают сигнал от датчика, связанный с некоторым параметром двигателя дробилки. Двигатель дробилки вращается с некоторой частотой и двигатель дробилки механически соединен с валом дробилки, который содержит множество инструментов для дробления материала. Способ также содержит этап, на котором определяют величину параметра двигателя дробилки на основе принятого сигнала, сравнивают величину параметра двигателя дробилки с пороговой величиной, и генерируют управляющий сигнал для изменения частоты вращения двигателя дробилки на основе сравнения величины параметра двигателя дробилки с пороговой величиной.
В другом варианте согласно настоящему изобретению предлагается промышленная машина, содержащая двигатель дробилки, вращающийся с некоторой частотой, вал дробилки, датчик и контроллер. Вал дробилки механически соединен с выходом двигателя дробилки, и вал дробилки включает множество инструментов, предназначенных для дробления материала. Датчик сконфигурирован для генерирования сигнала, связанного с некоторым параметром двигателя дробилки. Контроллер сконфигурирован для приема сигнала от датчика, для определения величины параметра двигателя дробилки на основе принятого сигнала, для сравнения величины параметра двигателя дробилки с пороговой величиной, и для генерирования управляющего сигнала для изменения частоты вращения двигателя дробилки на основе сравнения величины параметра двигателя дробилки с пороговой величиной.
Другие аспекты изобретения будут очевидны из нижеследующего описания и приложенных чертежей.
Краткое описание чертежей
Фиг. 1 - вид сверху промышленной машины по варианту настоящего изобретения.
Фиг. 2 - вид сбоку промышленной машины по фиг. 1.
Фиг. 3 - вид сверху промышленной машины по другому варианту настоящего изобретения.
Фиг. 4 - вид сбоку машины по фиг. 3.
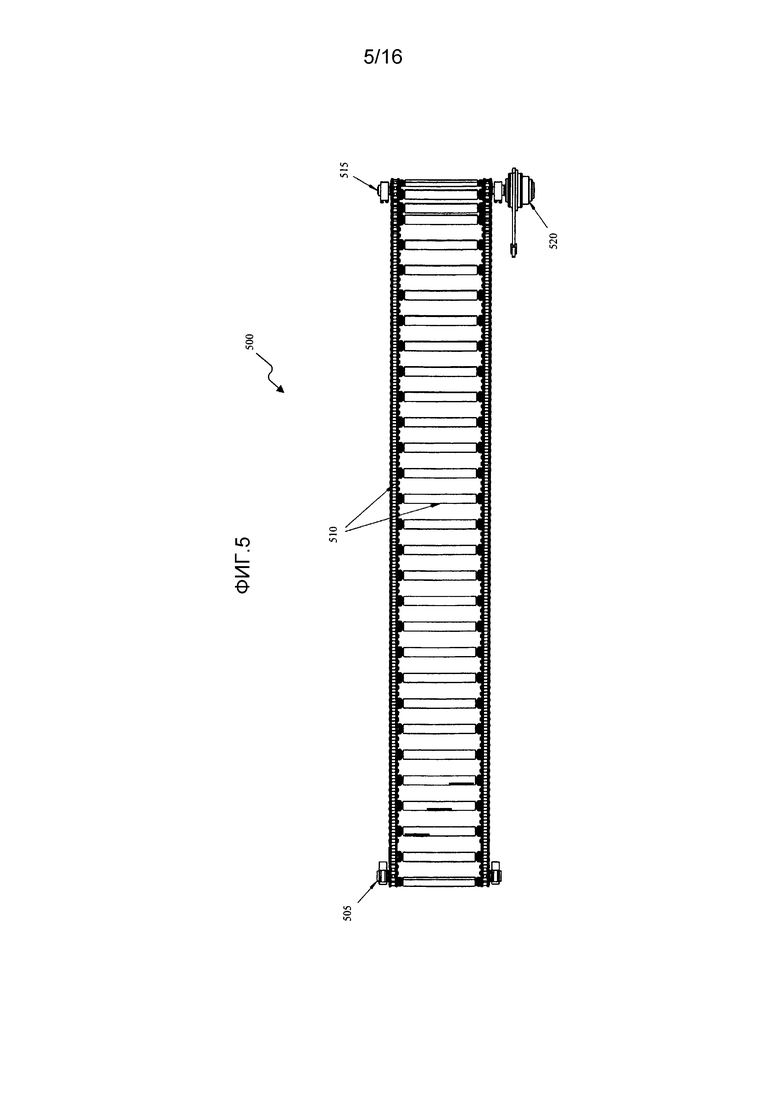
Фиг. 5 - вид сверху промышленной машины по другому варианту настоящего изобретения.
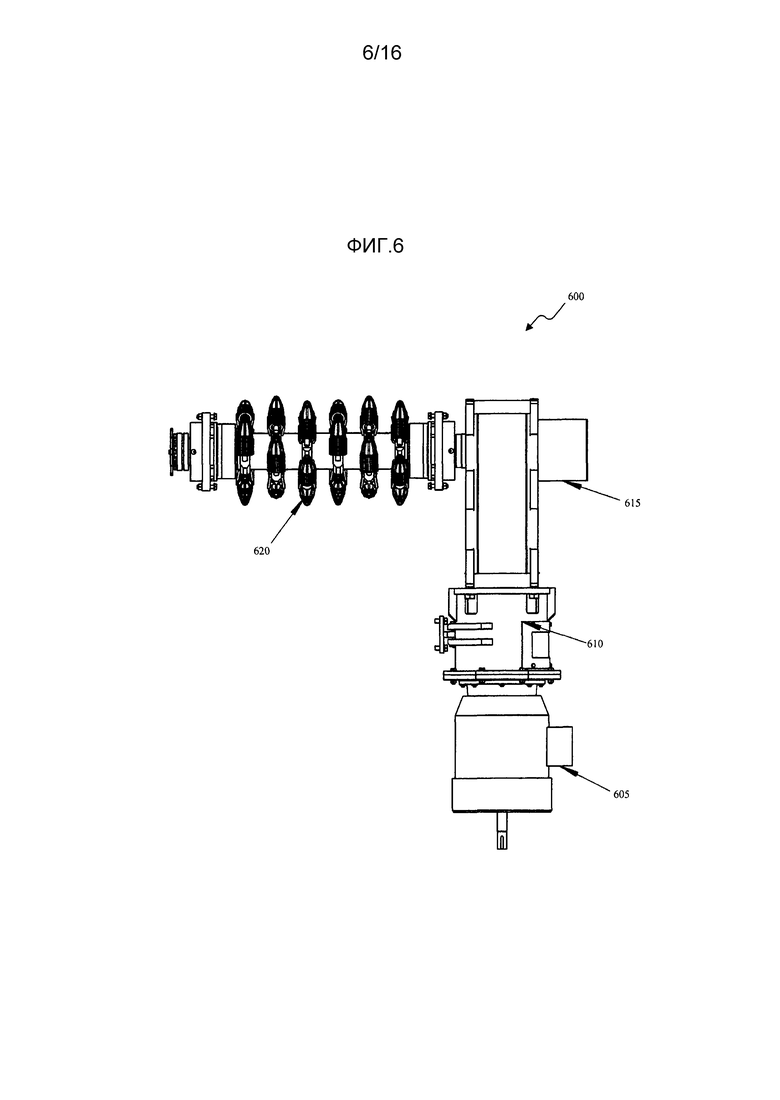
Фиг. 6 - вид сбоку машины по фиг. 5.
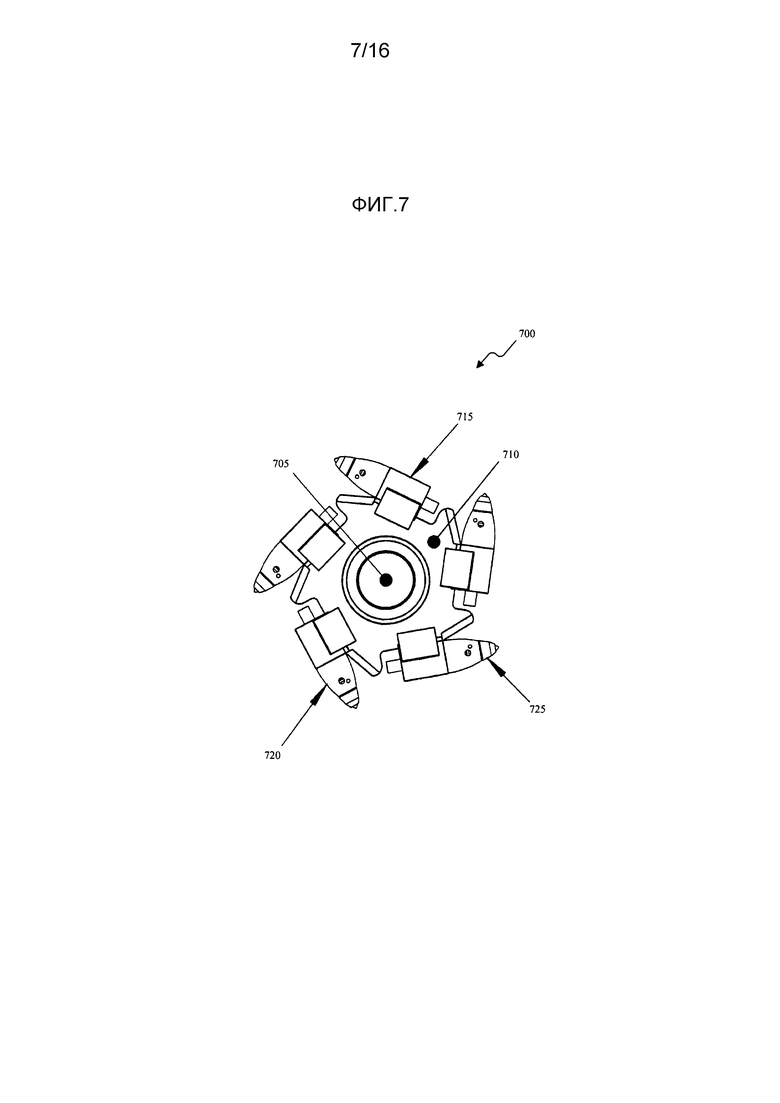
Фиг. 7 - дробильное устройство по варианту настоящего изобретения.
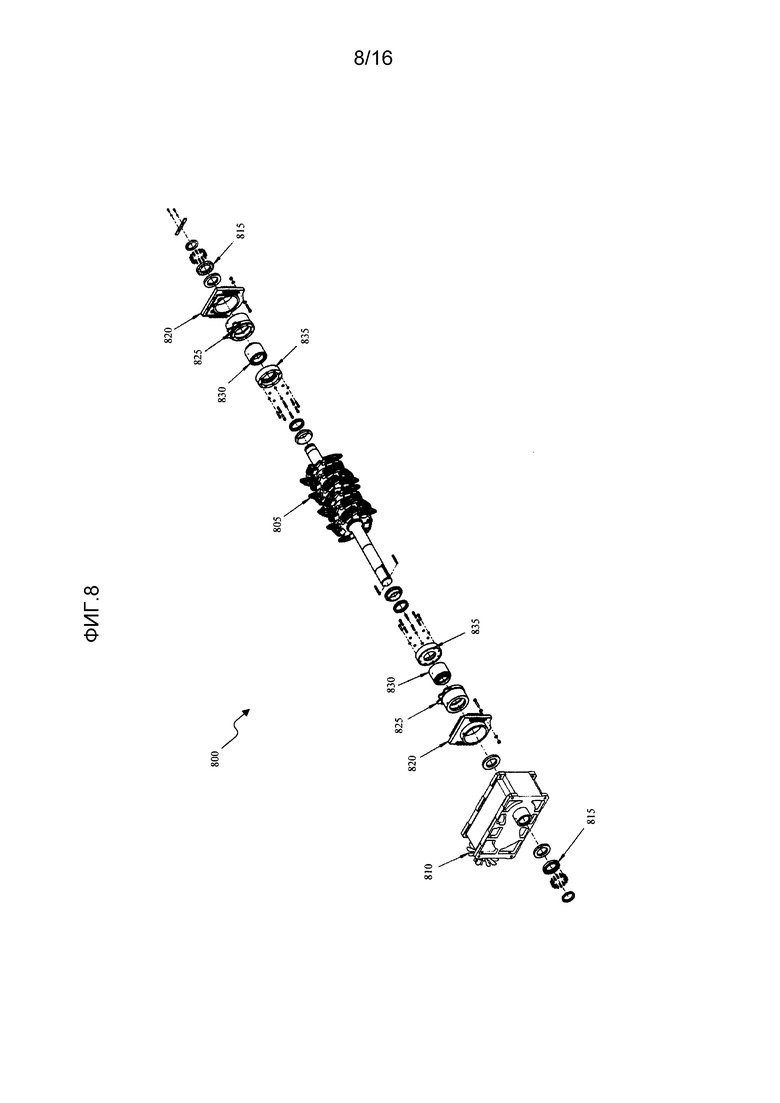
Фиг. 8 - разнесенный вид в перспективе вала дробилки по варианту настоящего изобретения.
Фиг. 9-11 - устройство для размерной обработки материала по настоящему изобретению.
Фиг. 12-14 - устройство для размерной обработки материала по другому варианту настоящего изобретения.
Фиг. 15 - контроллер для промышленной машины по варианту настоящего изобретения.
Фиг. 16 - процесс управления промышленной машиной по варианту настоящего изобретения.
Фиг. 17 - процесс управления промышленной машиной по другому варианту настоящего изобретения.
Подробное описание
Перед тем, как приступить к подробному описанию вариантов настоящего изобретения, следует указать, что настоящее изобретение не ограничивается деталями конструкции и расположением компонентов, которые приведены в нижеследующем описании или показаны на чертежах. Изобретение может иметь другие варианты и может быть реализовано или выполнено различными способами. Кроме того, следует понимать, что фразеология и терминология, используемая в настоящем описании, предназначена для описания и не должна толковаться в ограничивающем смысле. Использование терминов "включающий", "содержащий", или "имеющий" и их вариантов означает включение элементов, перечисленных после них и их эквивалентов, а также дополнительных элементов. Термины "установленный", "соединенный" и "сопряженный" используются в широком смысле и охватывают прямую и косвенную установку, соединение и сопряжение. Далее, термины "соединенный" и "сопряженный" не ограничиваются физическими или механическими соединениями или сопряжениями, и могут включать электрические соединения или сопряжения, как прямые, так и косвенные. Кроме того, электронные сообщения и уведомления могут осуществляться любыми известными средствами, включая прямые соединения, беспроводные соединения и т.п.
Следует отметить, что для реализации настоящего изобретения можно использовать множество аппаратных и программных средств, а также множество различных структурных компонентов. Кроме того, как описано в последующих параграфах, конкретные конфигурации, показанные на чертежах, являются лишь примерами вариантов изобретения и возможны другие альтернативные конфигурации. Термины "процессор", "центральный процессор", и "ЦПУ" являются взаимозаменяемыми, если не указано иное. Когда термин "процессор", "центральный процессор" или "ЦПУ" используется для обозначения устройства, выполняющего конкретные функции, следует понимать, что если не указано иное, эти функции могут выполняться единственным процессором или множеством процессоров, организованных в любой форме, включая параллельные процессоры, последовательные процессоры, тандемные процессоры или конфигурации облачных вычислений.
Описываемое изобретение относится к промышленной машине, такой как дробилка-питатель или калибровочная машина (например, одновалковая дробилка, двухвалковая дробилка и пр.). Промышленная машина включает, например, по меньшей мере один двигатель дробилки и по меньшей мере один двигатель конвейера (например, в вариантах, относящихся к дробилкам-питателям). Контроллер промышленной машины сконфигурирован для выполнения мониторинга различных сигналов датчика, связанных с рабочими характеристиками или параметрами двигателей для определения рабочего состояния промышленной машины. Рабочее состояние промышленной машины может включать, например, уровень нагрузки на вал дробилки, уровень нагрузки на конвейер, частоту вращения двигателей, мощность двигателей, крутящий момент двигателей, нагрузку на двигатели и пр. Контроллер или один или более специализированный привод, соединенный с контроллером, выполнен с возможностью определять состояние, связанное с промышленной машиной и изменять частоту вращения двигателя дробилки или двигателя конвейера для улучшения работы промышленной машины. Например, частота вращения двигателей может быть изменена для улучшения пропускной способности, уменьшения износа, повышения качества материала на выходе и пр. В каждом случае параметры двигателя дробилки и/или двигателя конвейера отслеживаются и регулируются (т.е., подстраиваются или изменяются) для достижения улучшенных характеристик промышленной машины без необходимости перепроектировать механические аспекты промышленной машины.
Изобретение может быть реализовано во множестве промышленных машин, таких как дробилка-питатель. Дробилка-питатель это низкопрофильное измельчающее устройство, которое содержит, например, горизонтальную валковую дробящую систему (обычно именуемую "вал дробилки"), систему конвейера, бункер, и предпочтительно, колеса или гусеницы, которые позволяют перемещать промышленную машину. Конкретные варианты дробилки-питателя могут иметь любую из различных форм, основанных помимо прочего, на устройствах для перемещения материала, на размере подаваемого материала, пропускной способности и пр.
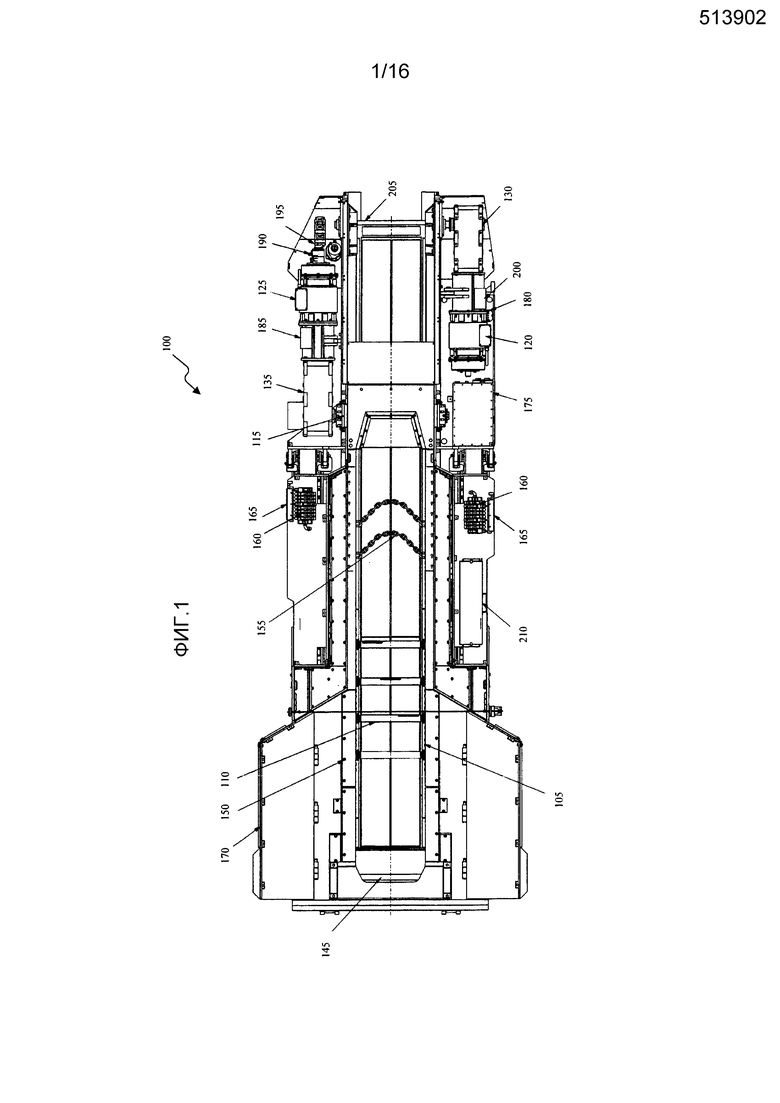
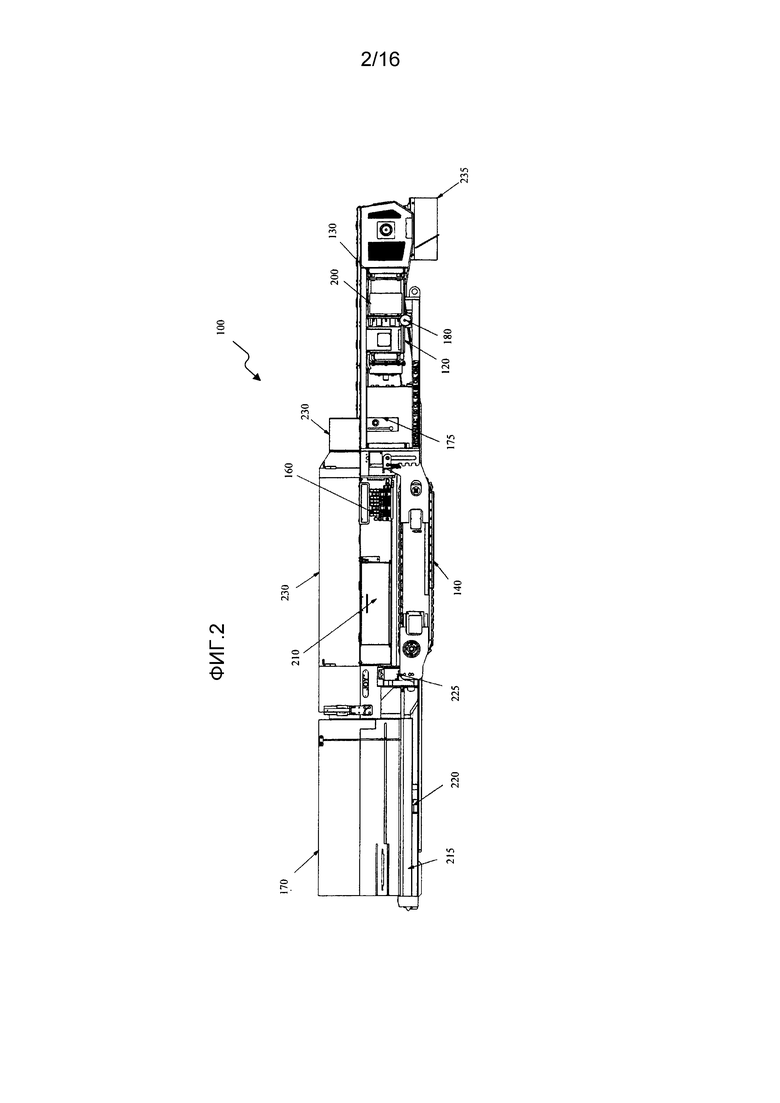
На фиг. 1 и 2 показана дробилка-питатель 100 по одному варианту настоящего изобретения. Дробилка-питатель 100 содержит регулируемый привод для управления частотой вращения вала дробилки. Промышленная машина 100 также содержит, помимо прочего, конвейер и цепь 105 конвейера, скребки 110 конвейера, узел 115 дробилки, первый двигатель 120 или двигатель конвейера, второй двигатель 125, или двигатель дробилки, первый редуктор (например, шестеренчатый редуктор) 130, второй редуктор (например, шестеренчатый редуктор) 135, и гусеницы 140. Промышленная машина 100 также содержит, например, задний вал 145, кожух 150 цепи, стопорные цепи 155, гидравлические управляющие клапаны 160, аварийные штанги 165, складные ограждения 170, гидравлический бак 175, гидравлический фильтр 180, моментную муфту 185, разъединитель 190 гидравлического насоса, гидравлический насос 195, муфту 200, передний вал 205, стартер 210, опору 215 натяжителя, натяжитель 220, цилиндр 225 подъемника бункера, боковые щиты 230, и выгружающий желоб 235. Приводом по существу именуется двигатель, но привод также может включать, например, муфту, редуктор и пр.
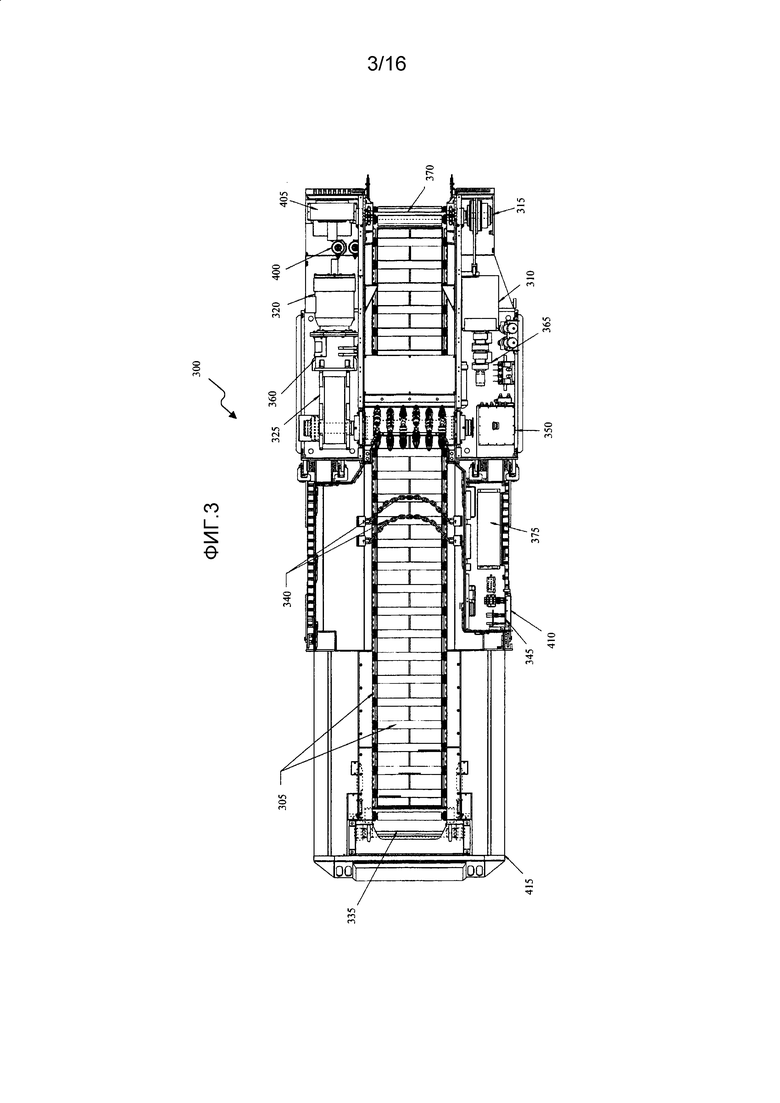
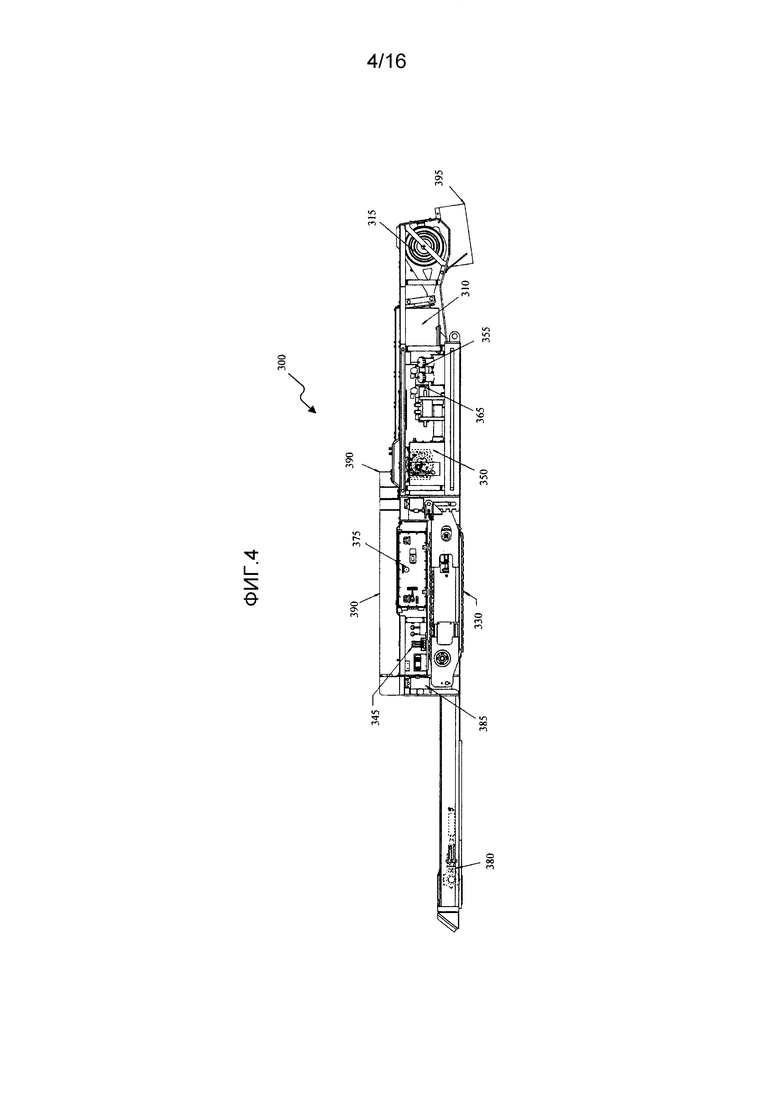
Другой вариант дробилки-питателя 300 показан на фиг. 3 и 4. Дробилка-питатель 300 также содержит регулируемый привод для управления частотой вращения вала дробилки, а также, помимо прочего, конвейер 305 с цепью и скребками, первый двигатель 310, гидравлический двигатель 315, второй двигатель 320, редуктор (например, шестеренчатый редуктор) 325 и гусеницы 330. Промышленная машина 300 также содержит, например, задний вал 335, стопорные цепи 340, гидравлические управляющие клапаны 345, гидравлический бак 350, гидравлические фильтры 355, моментную муфту 360, гидравлический насос 365, передний вал 370, стартер 375, натяжитель 380, цилиндр 385 подъемника бункер, боковые щиты 390, выгружающий желоб 395, противопожарные баки 400, теплообменник 405, ленточный переключатель 410, приемный конец 415 (например, трехходовой приемный конец).
Прежде, чем подробно описывать работу дробилок-питателей 100 и 300, следует обратить внимание на различные подсистемы, показанные на фиг. 5-8, которые приведены, чтобы дополнительно продемонстрировать, как собраны первичные системы дробилки питателя. Например, на фиг. 5 показан узел 500 конвейера для промышленной машины 100 или промышленной машины 300, содержащий задний вал 505, цепь и скребки 510 конвейера, передний вал 515 и гидравлический привод 520 конвейера. В некоторых вариантах узел 500 конвейера содержит двигатель и редуктор для привода конвейера. На фиг. 6 показан узел 600 дробилки, который содержит двигатель 605, моментную муфту 610, редуктор 615, и вал 620 дробилки. На фиг. 7 показано дробильное устройство или инструмент 700, который содержит вал 705, кольцо 710 дробилки, держатель 715, промежуточный держатель 720, и зубок 725 дробилки. На фиг. 8 показан узел 800 вала дробилки, который содержит вал 805, редуктор 810, компрессионные кольца 815, монтажные плиты 820, корпуса 825 подшипников, подшипники 830 и держатели 835 подшипников.
Для наглядности изобретение будет описано в применении к дробилке-питателю 100, хотя приведенное ниже описание работы дробилки-питателя также применимо к дробилке-питателю 300. Как показано на фиг. 6, дробилка-питатель 100 содержит горизонтально установленный вращающийся вал 620 дробилки, приводимый во вращение установленным на валу редуктором 615 в комбинации с двигателем 605. В некоторых вариантах дробилка-питатель 100 содержит цепной привод с маховиком, и редуктор, приводимый в действие двигателем, установленным на раме дробилки-питателя 100. Сила для дробления материала для дробилки-питателя создается в результате вращения массы вала 620 дробилки в комбинации с частотой вращения вала 620 дробилки. Сила для дробления материала ограничивается предохранительным устройством или контроллером, а также скребковым конвейером, описанным выше (например, за счет регулирования скорости, с которой материал пропускается через дробилку-питатель). Такая дробящая сила дробилки-питателя 100 соотносится (т.е., непосредственно относится) с сопротивлением материала дробящему воздействию зубков, установленных на вращающемся валу дробилки. Чем тверже материал, тем больше сила, создаваемая валом и двигателем дробилки при дроблении материала.
Конвейерная система содержит цепи 105 и скребки 150, приводимые в форме бесконечной петли вокруг рамы дробилки-питателя 100. Конвейерная система также содержит передний вал или ведущий вал 205, с которым соединен привод конвейера, и задний вал или холостой вал 145, по которому узел цепей и скребков возвращается на платформу дробилки-питателя 100. Привод конвейера может быть прямо или косвенно соединен с одним или более гидравлическим двигателем или одним или более двигателем (например, двигателем 120), и одним или более редуктором (например, редуктор 130), который непосредственно соединен с передним валом 205 или косвенно соединен с передним валом 205 через цепную передачу.
Скребковый конвейер сконфигурирован для протаскивания материала на узел 115 дробилки и сквозь него. Скребковый конвейер оказывает сопротивление материалу так, чтобы инструменты вала дробилки (т.е., зубки дробилки) могли проникнуть в материал и разделить его, когда материал проходит сквозь узел 115 дробилки. Материал сбрасывается в транспортные средства, перевозящие материал, через бункер, расположенный у заднего вала 145. Бункер является накопителем дробилки-питателя 100, который позволяет сбрасывать материал в транспортные средства, перевозящие материал, с максимально возможной скоростью. Дробилка-питатель 100 также может быть либо фиксированной (т.е., установленной постоянно), либо полумобильной (т.е., установленной на колесах или салазках), либо полностью мобильной (т.е., самодвижущейся на гусеничном ходу).
В качестве альтернативы дробилке-питателю настоящее изобретение может применяться, например, в дробилке-грохоте. Конкретная реализация дробилки-грохота также может принимать различные формы (например, одновалковый измельчитель, двухвалковый измельчитель и пр.), построенные на базе, помимо прочего, размера подаваемого материала, пропускной способности, типе материала и пр. Двухвалковый измельчитель - это промышленная машина, в которой измельчаемый материал подается под действием силы тяжести и в которой оба вала дробилки вращаются в направлении друг друга для создания сжимающегося кармана, в котором материал измельчается инструментами вала дробилки (например, зубками или блоками сменных вставок).
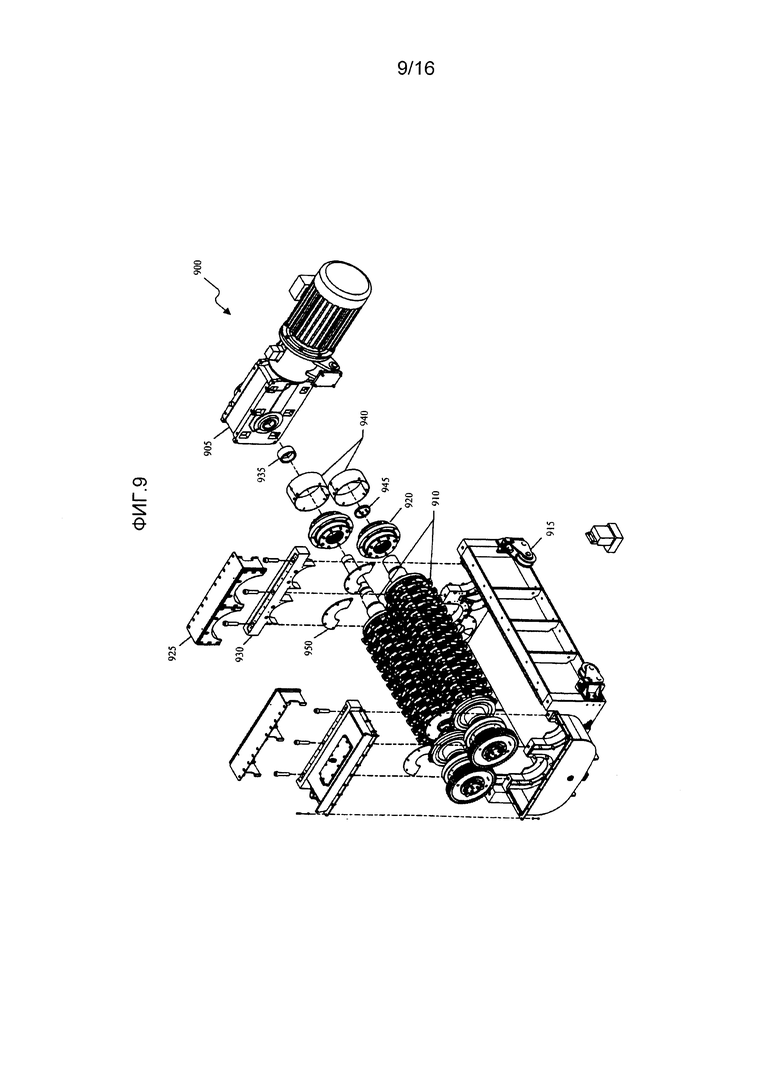
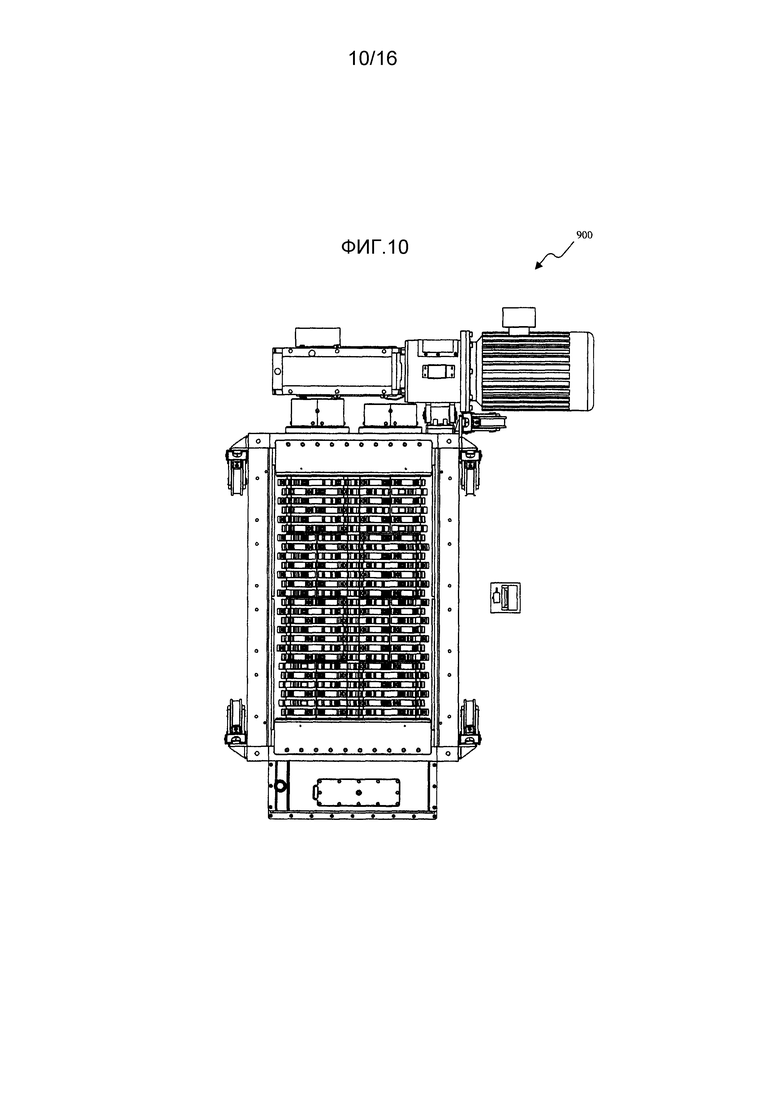
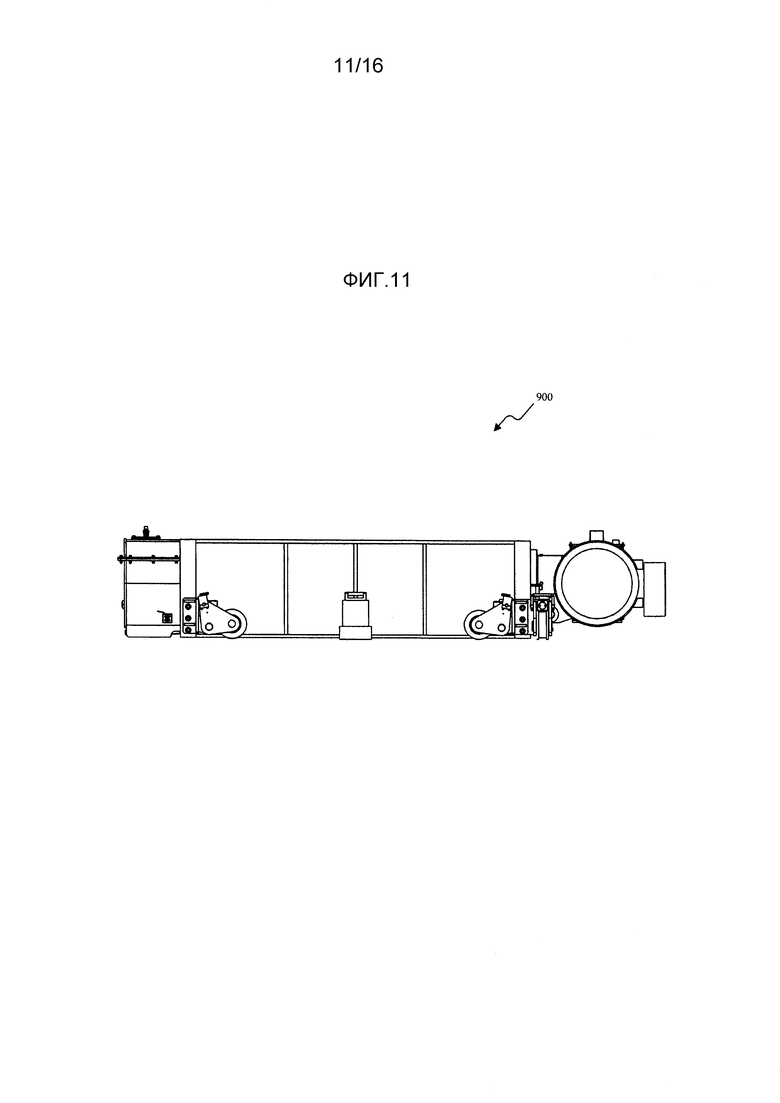
На фиг. 9-11 показан двухвалковый измельчитель 900, который содержит узел 905 привода, узел 910 вращающегося вала, узел 915 колеса, узел 920 подшипников, торцевую крышку 925, секцию 930 рамы, проставку 935, наружную крышку 940 подшипника, торцевую крышку 945 и внутреннюю крышку 950 подшипника.
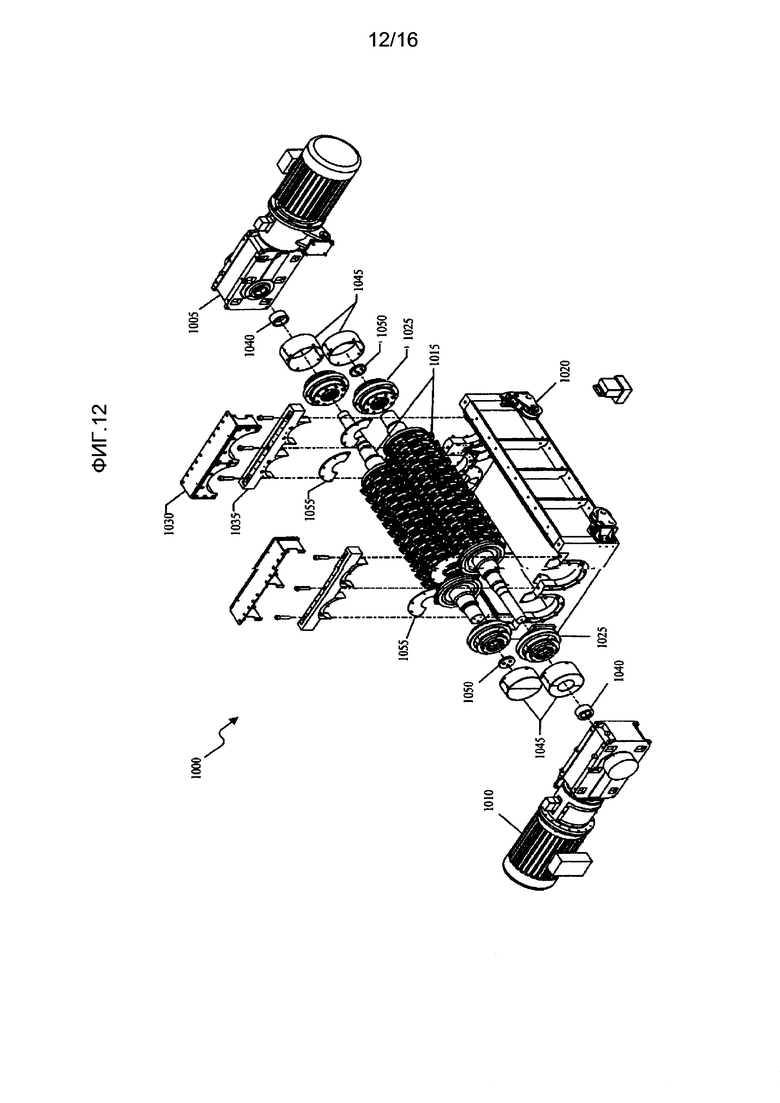
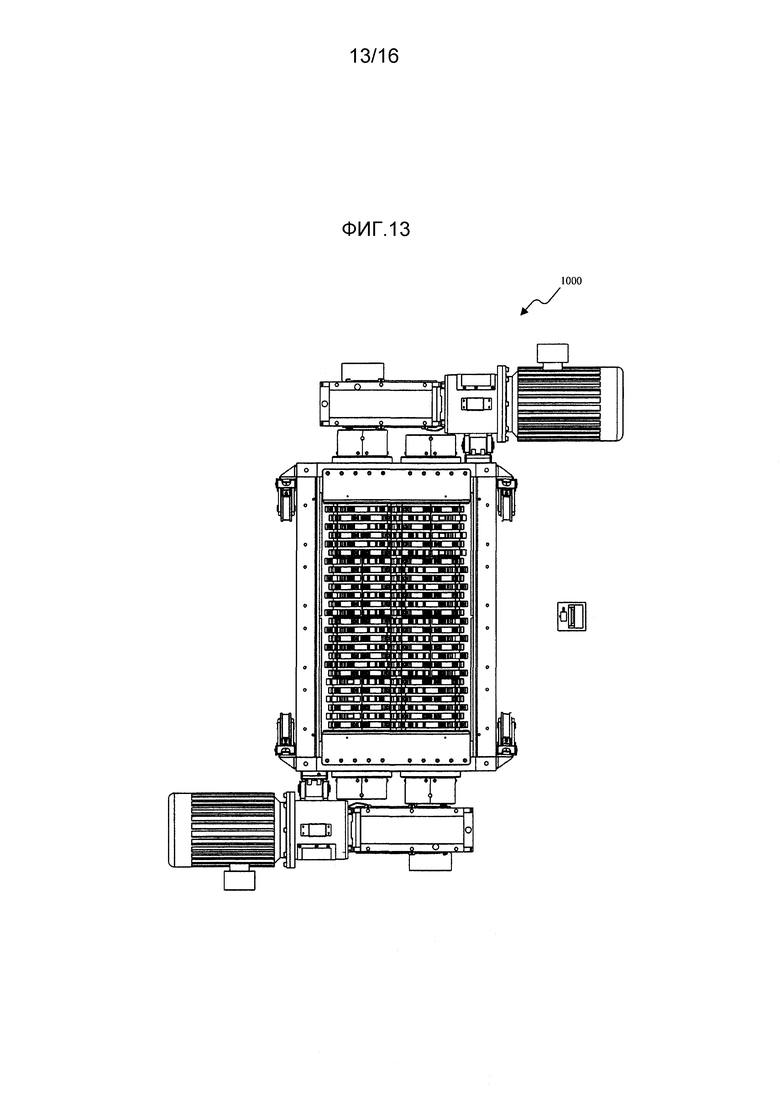
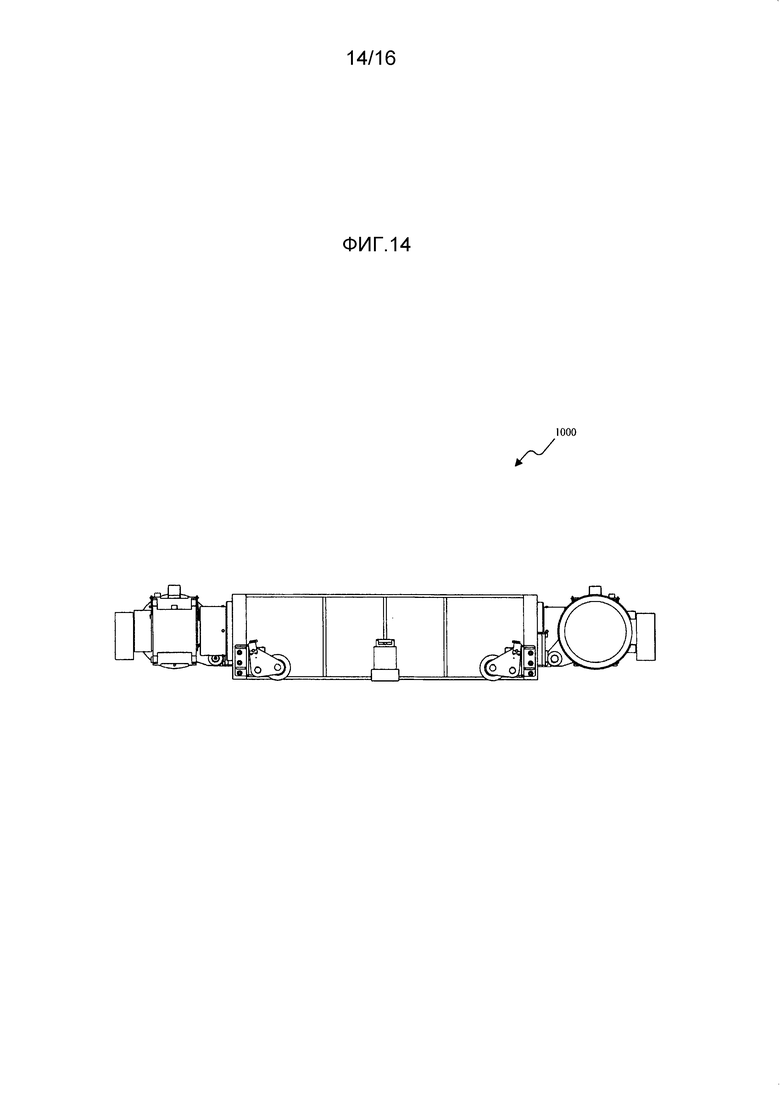
Другой двухвалковый измельчитель показан на фиг. 12-14. Этот двухвалковый измельчитель 1000 содержит первый приводной узел 1005, второй приводной узел 1010, узел 1015 вращающегося вала измельчителя, узел 1020 колеса, узлы 1025 подшипников, торцевую крышку 1030, секцию 1035 рамы, проставки 1040, наружные крышки 1045 подшипников, торцевые крышки 1050, и внутренние крышки 1055 подшипников.
Как указано выше, двухвалковый измельчитель содержит два измельчающих вала для дробления материала. В некоторых вариантах эти валы синхронизированы через синхронизирующую зубатую передачу и приводятся во вращение двигателем и редуктором, соединенным с одним из этих валов. В других вариантах каждый из измельчающих валов может приводиться независимо соответствующими двигателями и редукторами. Валы измельчителя установлены на раме так, что расстояние между валами в комбинации с частотой вращения валов определяет как пропускную способность двухвалкового измельчителя, так и размер материала, выходящего из этого двухвалкового измельчителя. В некоторых вариантах частота вращения валов на центральной линии валов измельчителя согласована со скоростью ленточного конвейера, который подает материал в двухвалковый измельчитель. В таких вариантах частота вращения валов, согласованная с потоком материала обеспечивает минимальное количество отходов материала (например, материала, имеющего на выходе неправильный размер).
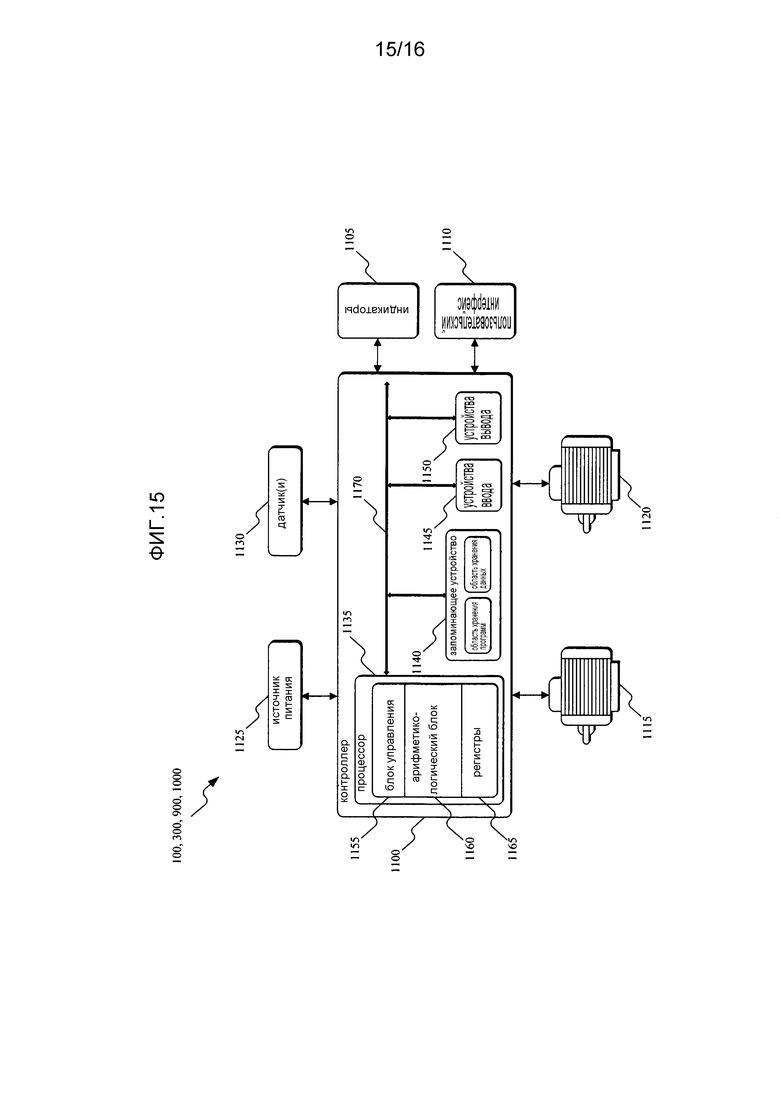
На фиг. 15 показан контроллер 1100 соединенный с промышленными машинами 100, 300, 900 и 1000. Контроллер 1200 электрически и коммуникативно соединен с различными модулями и компонентами этих промышленных машин. Например, показанный контроллер 1100 соединен с одним или более из индикаторов 1105, с модулем 1110 пользовательского интерфейса, с одним или более из двигателей конвейера и с приводами 1115 двигателей конвейера, с одним или более из двигателей дробилки и с приводами 1120 двигателей дробилки, с модулем 1125 источника питания, и с одним или более датчиком 1130. Контроллер 1100 содержит комбинацию аппаратных и программных средств, работающих, помимо прочего, для управления работой промышленных машин, для управления частотой вращения двигателей 1120 и 1125, для активации одного или более индикатора 1105 (например, жидкокристаллического дисплея), для мониторинга работы промышленных машин и т.д. Один или более датчик 1130 может быть, помимо прочего, одним или более датчиком тока, одним или более токовым трансформатором, одним или более датчиком частоты вращения (например, множеством датчиков Холла), датчиками угловой скорости, одним или более датчиком напряжения, одним или более датчиком крутящего момента, одним или более датчиком давления, одними или более весами на ленточном конвейере, одной или более камерой для обнаружения или измерения размера частиц продукта, одним или более резистивным датчиком температуры, и т.д. Двигатели 1115 и 1120 могут быть, например, двигателями постоянного тока, индукционными двигателями переменного тока, двигателем переменного тока с фазным ротором, бесщеточным двигателем постоянного тока, двигателем с постоянным магнитом, коммутируемым реактивным двигателем, синхронным коммутируемым реактивным двигателем, гидравлическим двигателем и т.д. или их комбинацией.
В некоторых вариантах контроллер 1100 содержит множество электрических и электронных компонентов, которые подают питание, осуществляют оперативное управление и защиту компонентов и модулей внутри контроллера 1100 и/или промышленных машин 100, 300, 900 и 1000. Например, контроллер 1100 содержит, помимо прочего, процессор 1135 (например, микропроцессор, микроконтроллер, или другое подходящее программируемое устройство), запоминающее устройство 1140, устройства 1145 ввода, и устройства 1150 вывода. Процессор 1135 содержит, помимо прочего, управляющий блок 1155, арифметико-логический блок 1160 и множество регистров 1165 (показанных на фиг. 15 как группа регистров) и выполнен на основе известной компьютерной архитектуры, например, архитектуры Гарварда, архитектуры фон Неймана и пр. Процессор 1135, запоминающее устройство 1140, устройства 1145 ввода и устройства 1150 вывода, а также различные модули, соединенные с контроллером 1100 соединены одной или более управляющей шиной и/или шиной данных (например, общей шиной 1170). Управляющая шина и/или шина данных показаны на фиг. 15 в общем виде для целей иллюстрации. Специалистам известно использование одной или более управляющей шины и/или шины данных для соединения различных модулей и компонентов и для связи между ними в рамках настоящего изобретения. В некоторых вариантах контроллер 1100 выполнен частично или полностью на полупроводниковом (например, на программируемой пользователем вентильной матрице) кристалле, например, на кристалле, созданном по процессу RTL (уровень межрегистровых передач). В некоторых вариантах промышленные машины содержат один контроллер, такой как контроллер 1100, для каждого двигателя дробилки или конвейера.
Запоминающее устройство 1140 содержит, например, область хранения программ и область хранения данных. Область хранения программ и область хранения данных могут содержать комбинации разных типов запоминающих устройств, таких как постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), (например, динамическое ОЗУ, синхронное динамическое ОЗУ и пр.), электрически стираемое программируемое ПЗУ (ЭСППЗУ), флэш-память, жесткий диск, SD-карта, или другие подходящие магнитные, оптические, физические или электронные запоминающие устройства. Процессор 1135 соединен с запоминающим устройством 1140 и выполняет команды программы, которые могут храниться в ОЗУ запоминающего устройства 1140, (например, во время исполнения), в ПЗУ запоминающего устройства 1140 (например, на по существу постоянной основе), или на другом не сменном машиночитаемом носителе информации, таком как другое запоминающее устройство или диск. Программные средства, включенные в реализацию промышленных машин, могут храниться в запоминающем устройстве 1140 контроллера 1100. Программные средства включают, например, микропрограммные средства, одну или более прикладную программу, программные данные, фильтры, правила один или более модуль программы и другие исполняемые команды. Контроллер 110 сконфигурирован для извлечения из запоминающего устройства и исполнения, помимо прочего, команд, связанных с процессами и способами управления, описанными в настоящем документе. В других конструкциях контроллер 1100 содержит дополнительные компоненты, другие компоненты или меньшей количество компонентов.
Модуль 1125 источника питания подает номинальное напряжение переменного или постоянного тока на контроллер 1100 иди другие компоненты или модули промышленных машин 100, 300, 900, 1000. Модуль 1125 источника питания получает питание, например, от источника, имеющего номинальное напряжение в линии от 100 до 240 В переменного тока и с частотой приблизительно 50-60 Гц. Модуль 1135 источника питания также сконфигурирован для подачи более низкого напряжения на рабочие цепи и компоненты внутри контроллера 1100 и промышленных машин 100, 300, 900, 1000. В других конструкциях контроллер 1100 или другие компоненты и модули внутри промышленных машин получают питание от одной или более батареи или аккумулятора или другого автономного источника питания (генератора, солнечной панели и пр.).
Модуль 1110 пользовательского интерфейса применяется для управления или мониторинга промышленных машин 100, 300, 900, 1000. Например, модуль 1110 пользовательского интерфейса оперативно соединен с контроллером 1100 для управления скоростью конвейера, частотой вращения вала дробилки, частотой вращения двигателя и пр. Модуль 1110 содержит комбинацию цифровых и аналоговых устройств ввода-вывода, необходимых для достижения требуемого уровня управления и мониторинга для промышленной машины. Например, модуль 1110 пользовательского интерфейса содержит дисплей (например, первичный дисплей, вторичный дисплей и т.д.) и устройство ввода, например, сенсорные дисплеи, множество рукояток, шкал, переключателей, кнопок и т.п. Дисплей, например, является жидкокристаллическим дисплеем, дисплеем на светодиодах, дисплеем на органических светодиодах, электролюминесцентным дисплеем, дисплеем с люминофором на основе эффекта эмиссии электронов с поверхностной проводимостью, дисплеем с автоэлектронной эмиссией, жидкокристаллическим дисплеем на тонкопленочных транзисторах и пр. Модуль 1110 пользовательского интерфейса также может быть сконфигурирован для отображения состояний или данных, связанных с промышленными машинами в реальном масштабе времени или в по существу реальном масштабе времени. Например, модуль 1110 пользовательского интерфейса сконфигурирован для отображения измеренных электрических характеристик промышленной машины, статуса электрической машины, частоты вращения двигателей, скорости конвейера, тип материала и т.п. В некоторых вариантах модуль 1110 пользовательского интерфейса управляется в сочетании с одним или более индикатором 1105 (например, светодиоды, громкоговорители и пр.) для создания визуальных или звуковых индикаторов о состоянии или условиях промышленных машин 100, 300, 900, 1000.
Контроллер 1100 использует сигналы, принятые от датчиков 1130, связанные с работой дробилки-питателя для, например, создания системы обратной связи между двигателем вала дробилки и двигателем конвейера. Например, контроллер 1100 может использовать напряжение, ток, частоту вращения, крутящий момент, мощность, гидравлическое давление и т.п., связанные с двигателем вала дробилки для определения величины нагрузки на вал дробилки. На основе этой измеренной нагрузки на двигатель дробилки контроллер 1100 регулирует частоту вращения двигателя дробилки или двигателя конвейера для уменьшения нагрузки на вал дробилки. Контроллер сконфигурирован для изменения частоты вращения вала дробилки, регулируя частоту вращения двигателя дробилки в пределах диапазона величин и/или для изменения скорости конвейера путем регулирования частоты вращения двигателя конвейера. Что касается двигателя дробилки и двигателя конвейера, контроллер 1100 сконфигурирован для изменения частоты вращения двигателя либо в сторону увеличения, либо в сторону уменьшения. В некоторых вариантах частоту вращения двигателей можно увеличить, например, на +10%, +20%, +30% или на величину в диапазоне от приблизительно 1% до 30% (например, относительно синхронной частоты вращения двигателя). Аналогично, частоту вращения двигателей можно уменьшить приблизительно на -10%, -20%, -25% или на величину диапазоне от приблизительно -1% до -25% (например, относительно синхронной частоты вращения двигателя).
В качестве иллюстративного примера, если нагрузка на двигатель дробилки высока (например, выше пороговой величины или величины перегрузки), частоту вращения двигателя конвейера можно уменьшить для снижения нагрузки на двигатель и вал дробилки. Дополнительно или альтернативно, если двигатель конвейера работает с полной скоростью и двигатель дробилки не слишком нагружен или не перегружен (например, нагрузка не превышает пороговой величины), значит двигатель дробилки имеет резерв мощности и частоту вращения двигателя дробилки можно увеличить. В таком случае увеличение частоты вращения двигателя дробилки приводит к увеличению частоты вращения вала дробилки для максимизации пропускной способности по материалу дробилки-питателя без перегрузки двигателя дробилки.
В некоторых вариантах частота вращения вала дробилки также может изменяться на основе плотности материала, перерабатываемого промышленной машиной. Материал более высокой плотности или более твердый больше нагружает вал дробилки, чем материал низкой плотности или относительно мягкий материал. Если ожидается переработка промышленной машиной материала первого типа (например, угля), например, на основании входной величины, введенной оператором, но промышленная машина вместо этого получает более твердый материал (например, камень), контроллер 1100 может обнаружить повышенную нагрузку (т.е., превышающую ожидаемую нагрузку или пороговую величину), определить, что перерабатываемый материал является более плотным и снизить частоту вращения двигателя дробилки для снижения частоты вращения и износа вала дробилки.
Когда изобретение реализовано в дробилке-грохоте (т.е., в двухвалковом измельчителе, одновалковом измельчителе и пр.) частотой вращения вала дробилки можно управлять для ограничения количества отходов (т.е., материала неправильного размера), которые проходят через вал дробилки. Дополнительно, когда зубки дробилки на валах изнашиваются, частоту вращения валов можно повысить для поддержания правильного и требуемого размера материала по мере увеличения зазора между двумя валками дробилки. В вариантах настоящего изобретения, где применяются два независимых двигателя дробилки регулировки размера продукта можно добиться, изменяя частоту вращения одного или обоих двигателей дробилки. Дополнительно, направление вращения вала дробилки в двухвалковой дробилке можно реверсировать для устранения заклинивания или извлечения не поддающихся дроблению объектов и можно использовать разные частоты вращения отдельных валов дробилки для удаления глин или отходов, что приводит к увеличению количества требуемого продукта на выходе дробилки. То есть, валы дробилки можно использовать для очистки друг друга от налипшего материала, используя разницу в частоте вращения этих двух валов.
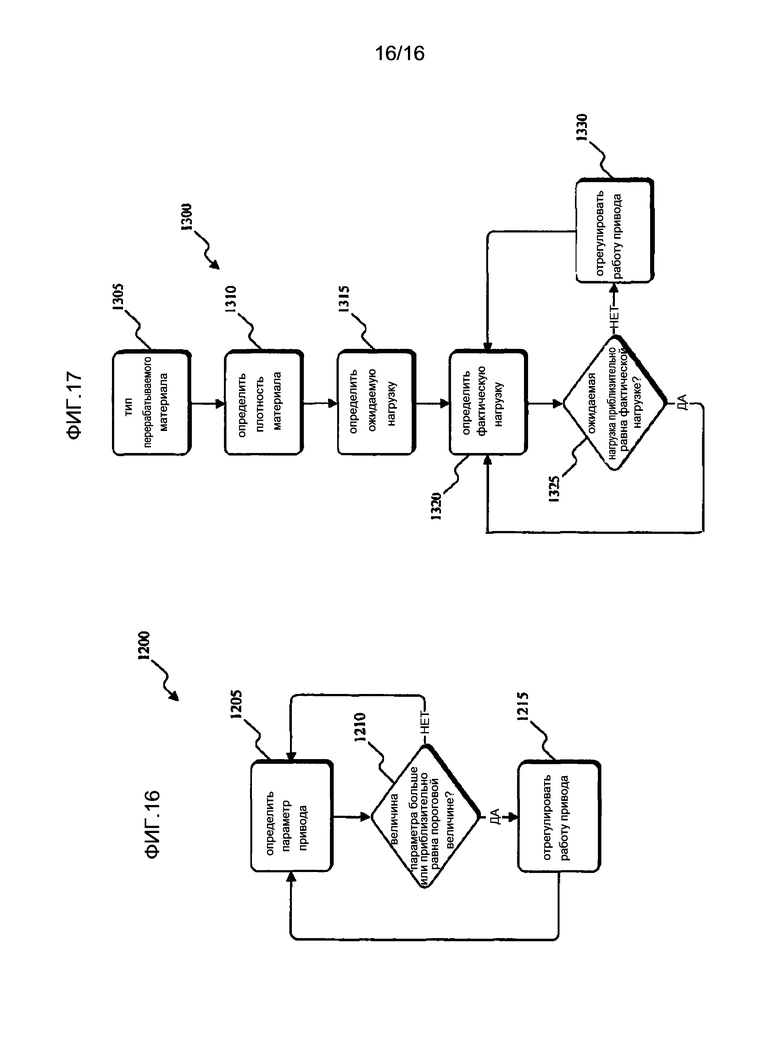
На фиг. 16 показан процесс 1200 регулирования работы привода дробилки для управления количеством и/или качеством переработанного промышленной машиной материала, а также для снижения напряжений и износа вала дробилки и промышленной машины. На этапе 1205 определяют параметр привода от двигателя промышленной машины. Параметр привода соответствует, например, току, напряжению, крутящему моменту, температуре, мощности, нагрузке и пр. на двигателе, приводящем во вращение вал дробилки. Как описано выше, вал дробилки соединен с двигателем через редуктор (например, шестеренчатый редуктор) и муфту. Механические свойства редуктора и муфты известны, поэтому для определения частоты вращения и нагрузки вала дробилки можно применять оперативные параметры двигателя, приводящего вал дробилки. Хотя для управления работой вала дробилки можно использовать любой из различных описанных выше параметров, в этом иллюстративном варианте используется нагрузка на двигатель (например, мощность, крутящий момент и пр.). Контроллер 1100 принимает сигналы от различных датчиков, описанных выше для определения параметров привода.
После этапа 1205 параметр двигателя или привода, найденный на этапе 1205, сравнивают с помощью контроллера 1100 с одной или более пороговой величиной. В некоторых вариантах контроллер 1100 сравнивает параметр с одной пороговой величиной (например, величиной перегрузки) или с двумя пороговыми величинами (например, с величиной перегрузки и величиной недогрузки). В других вариантах можно применять любое количество пороговых величин. Количество пороговых величин, применяемое в процессе 1200, зависит от требуемой точности управления валом дробилки. Например, найденный параметр двигателя или привода можно непрерывно сравнивать с последовательностью пороговых величин и рабочую частоту вращения двигателя и вала дробилки можно соответственно регулировать небольшими приращениями для поддержания максимальной пропускной способности или для ограничения износа промышленной машины.
Если величина параметра превышает пороговую величину или приблизительно равна пороговой величине (например, в случае перегрузки), контроллер 1100 регулирует работу вала дробилки, замедляя двигатель дробилки (этап 1215) и процесс возвращается на этап 1205. Если, на этапе 1210 величина параметра не превышает пороговой величины или приблизительно равна пороговой величине, процесс 1200 возвращается на этап 1205, где вновь определяют параметр двигателя или привода.
На фиг. 17 показан другой процесс 1300 управления работой промышленной машины, которая содержит вал и двигатель дробилки. На этапе 1305 контроллер принимает указание на тип материала, которая должна перерабатывать промышленная машина. Этим указанием может быть, например, данные, введенные оператором, заранее запрограммированный тип материала и т.п. На основе типа материала, который должна перерабатывать промышленная машина, можно определить плотность этого материала (этап 1310). Плотность контроллер 1100 может брать из запоминающего устройства 1140, она может вводиться оператором и т.д. На основе типа перерабатываемого материала и плотности этого материала, контроллер 1100 определяет ожидаемую нагрузку для этого материала, когда он перерабатывается промышленной машиной. Например, для дробилки-питателя нагрузка может соответствовать ожидаемому весу, когда материал загружается на конвейер. Дополнительно или альтернативно, нагрузка может быть нагрузкой на вал дробилки и может определяться, как описано выше для процесса 1200.
На этапе 1320 определяют фактическую нагрузку, испытываемую конвейером, например, с помощью одних или более весов, датчика давления, тензодатчика и пр. Дополнительно или альтернативно, определяют нагрузку на вал или двигатель дробилки, как описано выше. Если нагрузка, измеренная на этапе 1320, приблизительно равна ожидаемой (этап 1325), процесс 1300 возвращается на этап 1320 для повторного определения нагрузки. Если на этапе 1325 фактическая нагрузка не является приблизительно равной ожидаемой нагрузке, работа привода регулируется. Параметры привода могут относиться, например, либо к двигателю дробилки (например, увеличение или уменьшение частоты вращения), либо к двигателю конвейера (например, увеличение или уменьшение частоты вращения). В некоторых вариантах, если промышленной машиной перерабатывается более твердый материал, чем ожидалось, замедляют либо вал и двигатель дробилки, либо конвейер и двигатель конвейера, чтобы уменьшить нагрузку на вал дробилки. Если промышленной машиной перерабатывается более мягкий материал, можно ускорить конвейер и двигатель конвейера или увеличить частоту вращения вала и двигателя дробилки, чтобы повысить нагрузку и максимизировать пропускную способность по материалу. После этапа 1330 процесс 1300 возвращается на этап 1320, на котором вновь определяют фактическую нагрузку.
Таким образом, согласно настоящему изобретению, помимо прочего, предлагается промышленная машина, содержащая дробильное устройство и регулируемый привод для управления частотой вращения дробящего устройства. Различные признаки и преимущества изобретения изложены в прилагаемой формуле.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ ПРОИЗВОДИТЕЛЬНОСТЬЮ ГОРНОДОБЫВАЮЩЕЙ СИСТЕМЫ | 2016 |
|
RU2799934C2 |
| Управление производительностью горнодобывающей системы | 2016 |
|
RU2712812C2 |
| ШРЕДЕР | 2011 |
|
RU2492927C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ РЕЖИМОМ КОНУСНОЙ ДРОБИЛКИ | 2019 |
|
RU2734831C1 |
| Устройство для регулирования производительности дробилки | 1983 |
|
SU1131537A1 |
| ДРОБИЛЬНАЯ УСТАНОВКА И СПОСОБ УПРАВЛЕНИЯ ТАКОЙ УСТАНОВКОЙ | 2008 |
|
RU2472588C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ | 2015 |
|
RU2595739C1 |
| ВАЛКОВАЯ ДРОБИЛКА ДЛЯ РЕЗАНИЯ ГУБЧАТОГО ТИТАНА | 2012 |
|
RU2519232C2 |
| АВТОМАТИЗИРОВАННАЯ УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА УГОЛЬНЫХ БРИКЕТОВ ИЗ БИОМАССЫ | 2023 |
|
RU2807761C1 |
| ДРОБИЛКА ДЛЯ МИНЕРАЛОВ | 2014 |
|
RU2671392C2 |
Группа изобретений относится к промышленной машине с регулируемым приводом и способу управления такой машиной, которая может найти применение в горнодобывающей промышленности. Промышленная машина содержит двигатель дробилки, вращающийся с некоторой частотой, вал дробилки, датчик и контроллер. Вал дробилки механически соединен с выходом двигателя дробилки и содержит множество инструментов, предназначенных для дробления материала. Датчик сконфигурирован для генерирования сигнала, связанного с параметром двигателя дробилки. Контроллер сконфигурирован для приема сигнала от датчика, определения величины параметра двигателя дробилки на базе принятого сигнала, сравнения величины параметра двигателя дробилки с пороговой величиной и для генерирования управляющего сигнала для изменения частоты вращения двигателя дробилки на основе сравнения величины параметра двигателя дробилки с пороговой величиной. Способ управления промышленной машины обеспечивает увеличение ресурса рабочих органов. 3 н. и 17 з.п. ф-лы, 17 ил.
1. Промышленная машина, содержащая:
двигатель дробилки, вращающийся с некоторой частой;
вал дробилки, механически соединенный с выходом двигателя дробилки, при этом вал дробилки содержит множество инструментов, предназначенных для дробления материала;
конвейер, сконфигурированный для транспортировки материала через промышленную машину;
датчик, сконфигурированный для генерирования сигнала, связанного с параметром двигателя дробилки; и
контроллер, сконфигурированный для:
приема сигнала от датчика;
определения величины параметра двигателя дробилки на основе принятого сигнала,
сравнения величины параметра двигателя дробилки с пороговой величиной, и
для генерирования сигнала для изменения частоты вращения двигателя дробилки на основе сравнения величины параметра двигателя дробилки с пороговой величиной.
2. Машина по п. 1, в которой параметр двигателя дробилки включает один элемент из ряда, содержащего напряжение, ток, частоту вращения, крутящий момент и мощность двигателя.
3. Машина по п. 1, в которой параметр двигателя дробилки включает нагрузку на двигатель.
4. Машина по п. 1, в которой пороговая величина соответствует состоянию перегрузки двигателя дробилки.
5. Машина по п. 1, в которой пороговая величина соответствует состоянию недогрузки двигателя дробилки.
6. Машина по п. 1, содержащая двигатель конвейера, вращающийся с некоторой частотой.
7. Машина по п. 6, в которой контроллер далее сконфигурирован для генерирования второго управляющего сигнала для изменения частоты вращения двигателя конвейера на основе сравнения величины параметра двигателя дробилки с пороговой величиной.
8. Способ управления промышленной машиной, содержащий этапы, на которых:
принимают сигнал от датчика, связанный с параметром двигателя дробилки, при этом двигатель дробилки вращается с некоторой частотой, при этом двигатель дробилки механически соединен с валом дробилки, содержащим множество инструментов, предназначенных для дробления материала;
определяют величину параметра двигателя дробилки на основе принятого сигнала;
сравнивают величину параметра двигателя дробилки с пороговой величиной и
генерируют управляющий сигнал для изменения частоты вращения двигателя дробилки на основе сравнения величины параметра двигателя дробилки с пороговой величиной.
9. Способ по п. 8, при котором параметр двигателя дробилки включает один элемент из ряда, содержащего напряжение, ток, частоту вращения, крутящий момент и мощность двигателя.
10. Способ по п. 8, при котором параметр двигателя включает нагрузку на двигатель.
11. Способ по п. 8, при котором пороговая величина соответствует состоянию перегрузки двигателя дробилки.
12. Способ по п. 8, при котором пороговая величина соответствует состоянию недогрузки двигателя дробилки.
13. Способ по п. 8, при котором промышленная машина является двухвалковой дробилкой.
14. Способ по п. 8, при котором контроллер сконфигурирован для генерирования второго управляющего сигнала для изменения частоты вращения двигателя конвейера на основе сравнения величины параметра двигателя дробилки с пороговой величиной.
15. Промышленная машина, содержащая:
двигатель дробилки, вращающийся с некоторой частотой;
вал дробилки, механически соединенный с выходом двигателя дробилки, при этом вал дробилки содержит множество инструментов, предназначенных для дробления материала;
датчик, сконфигурированный для генерирования сигнала, связанного с параметром двигателя дробилки; и
контроллер, сконфигурированный для:
приема сигнала от датчика;
определения величины параметра двигателя дробилки на основе принятого сигнала,
сравнения величины параметра двигателя дробилки с пороговой величиной, и
для генерирования сигнала для изменения частоты вращения двигателя дробилки на основе сравнения величины параметра двигателя дробилки с пороговой величиной.
16. Машина по п. 15, в которой промышленная машина является дробилкой-питателем.
17. Машина по п. 15, содержащая конвейер, сконфигурированный для транспортировки материала через промышленную машину, и двигатель конвейера, вращающийся с некоторой частотой.
18. Машина по п. 17, в которой контроллер сконфигурирован для генерирования второго сигнала для изменения частоты вращения двигателя конвейера на основе сравнения величины параметра двигателя дробилки с пороговой величиной.
19. Машина по п. 15, в которой параметр двигателя дробилки включает нагрузку на двигатель.
20. Машина по п. 15, в которой пороговая величина соответствует состоянию перегрузки двигателя дробилки.
| US 8360349 B, 29.01.2013 | |||
| ПЬЕЗОКЕРАМИЧЕСКИЙ МАТЕРИАЛ | 1992 |
|
RU2040506C1 |
| Двухвалковое устройство для дробления | 1979 |
|
SU856544A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |

