УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение относится к мобильному роботу, такому как робот-уборщик, и, более конкретно, к устройству для отслеживания перемещения мобильного робота и способу для этого.
Уровень техники
Вообще, робот-уборщик, одна из разновидностей мобильного робота, является устройством для автоматической уборки зоны уборки посредством всасывания грязи, к примеру пыли с пола, наряду с самостоятельным управлением передвижением в пределах зоны, которую следует убрать, без пользовательского управления.
Такой робот-уборщик сконструирован, чтобы выполнять работу по уборке наряду с самостоятельным управлением передвижением по заранее заданной траектории уборки в соответствии со встроенной программой. С тем чтобы робот-уборщик автоматически перемещался по заранее заданной траектории и выполнял работу по уборке, большое количество чувствительных элементов использовано, чтобы выявлять местоположение и расстояние перемещения робота-уборщика, и препятствие вокруг робота-уборщика.
Однако для того чтобы такому роботу-уборщику выполнять работу по уборке наряду с управлением перемещением по заранее заданной траектории уборки, многие дорогостоящие чувствительные элементы установлены в роботе уборщике, тем самым усложняя его внутреннюю структуру и увеличивая стоимость производства.
Для того чтобы решить такую проблему, робот-уборщик был усовершенствован, чтобы выполнять работу по уборке случайным образом при передвижении по произвольной траектории уборки.
Фиг.1 - структурная схема, иллюстрирующая конструкцию устройства перемещения робота-уборщика в соответствии с традиционным уровнем техники.
Как показано на фиг.1, устройство перемещения традиционного робота-уборщика включает в себя: узел 1 восприятия препятствия для восприятия препятствия по столкновению, происходящему, когда робот-уборщик двигается прямо в заданной зоне; узел 2 управления для остановки перемещения робота-уборщика на основании сигнала, выдаваемого из узла 1 восприятия препятствия, случайным образом порождающего случайный угол и поворачивающего робота-уборщика на случайный угол, который использован в качестве угла поворота; узел 3 привода электродвигателя левого колеса для приведения в действие электродвигателя 5 левого колеса робота-уборщика на определенной скорости в соответствии с сигналом, вырабатываемым из блока 2 управления; узел 4 привода электродвигателя правого колеса для приведения в действие электродвигателя 6 правого колеса робота-уборщика на определенной скорости в соответствии с сигналом, вырабатываемым из блока 2 управления.
В дальнейшем работа традиционного робота-уборщика, имеющего такую конструкцию, будет описана со ссылкой на фиг.2.
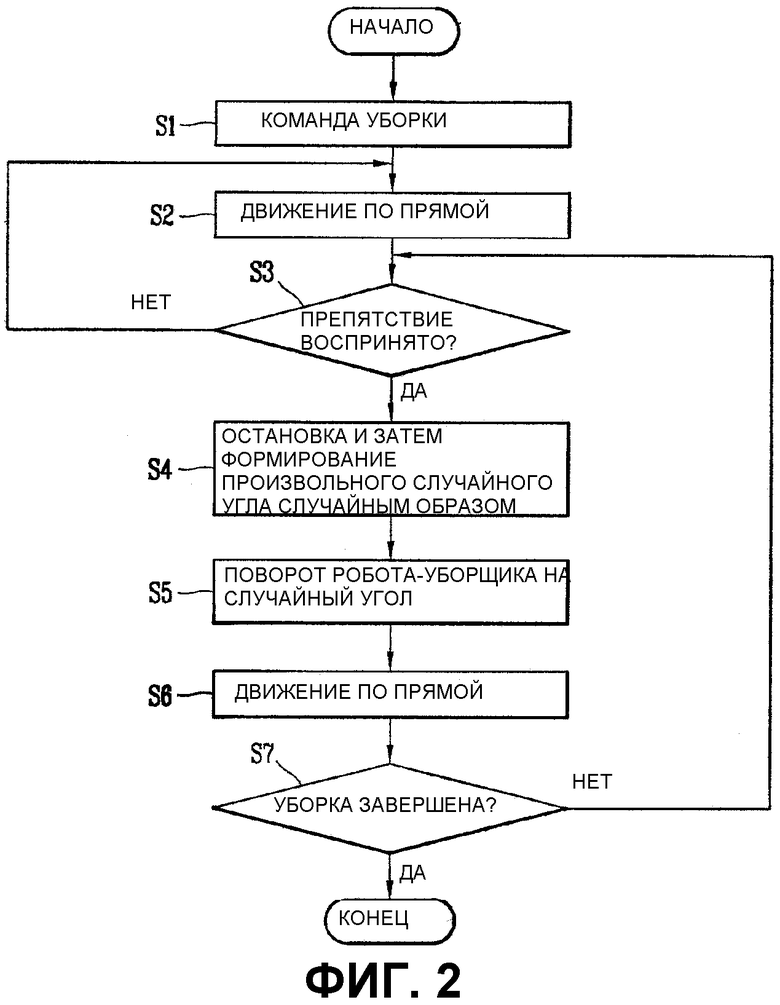
Фиг.2 - последовательность операций способа, иллюстрирующая работу в отношении способа перемещения робота-уборщика в соответствии с традиционным уровнем техники.
Как показано на фиг.2, способ перемещения традиционного робота-уборщика содержит следующее: пользователь вводит команду уборки и предоставляет роботу-уборщику возможность двигаться прямо, чтобы в силу этого воспринимать препятствия (с S1 по S3); робот-уборщик остановлен, если препятствие воспринято в соответствии с результатом восприятия, и затем, произвольный случайный угол выработан случайным образом (S4); выработанный случайный угол использован в качестве угла поворота, и робот-уборщик развернут в соответствии с углом поворота (S5); развернутый робот-уборщик двигается прямо (S6); передвижение робота-уборщика остановлено, когда работа по уборке робота-уборщика завершена посредством определения того, завершил робот-уборщик или нет работу по уборке при передвижении по прямой линии (S7).
Способ перемещения традиционного робота-уборщика будет описан подробно.
Сначала, когда пользователь вводит команду уборки робота-уборщика (S1), блок 2 управления выдает сигнал управления, чтобы делать скорость вращения электродвигателя 5 левого колеса равной скорости вращения электродвигателя 6 правого колеса, с тем чтобы робот-уборщик мог передвигаться прямолинейно.
Узел 3 привода левого электродвигателя приводит в движение электродвигатель 5 левого колеса в соответствии с выданным сигналом управления, и узел 4 привода правого электродвигателя приводит в движение электродвигатель 6 правого колеса в соответствии с выданным сигналом управления. Следовательно, робот-уборщик двигается прямо при помощи приведенных в движение электродвигателей 5 и 6 левого и правого колеса (S2).
Когда робот-уборщик сталкивается со случайным препятствием при движении по прямой линии, узел 1 восприятия препятствия воспринимает препятствие на основании величины ударной силы, производимой столкновением, и снабжает узел 2 управления сигналом восприятия препятствия в соответствии с восприятием (S3).
Затем, узел 2 управления останавливает передвижение робота-уборщика в соответствии с поставляемым сигналом восприятия препятствия, вырабатывает произвольный случайный угол случайным образом (S4) и выдает сигнал управления, чтобы сделать выработанный случайный угол углом поворота робота-уборщика. В это время узел 2 управления выдает сигналы управления, чтобы сделать скорость электродвигателя 5 левого колеса отличной от скорости электродвигателя 6 правого колеса, узлу 3 привода электродвигателя левого колеса и узлу 4 привода электродвигателя правого колеса, с тем чтобы робот-уборщик мог развернуться на угол поворота.
Таким образом, узел 3 привода электродвигателя левого колеса приводит в движение электродвигатель 5 левого колеса в соответствии с сигналом управления, выдаваемым от узла 2 управления, и узел 4 привода электродвигателя правого колеса приводит в движение электродвигатель 6 правого колеса в соответствии с сигналом управления, выдаваемым из узла 2 управления, с тем, чтобы робот-уборщик был развернут на произвольный случайный угол (S5).
Затем, узел 2 управления предоставляет роботу-уборщику возможность двигаться прямолинейно посредством выдачи сигнала управления, чтобы сделать скорость электродвигателя 5 левого колеса равной скорости электродвигателя 6 правого колеса, узлу 3 привода электродвигателя левого колеса и узлу 4 привода электродвигателя правого колеса (S6).
В то время как робот-уборщик двигается прямолинейно, определено, завершил робот-уборщик или нет работу по уборке. Когда робот-уборщик завершил уборку, работа по уборке робота-уборщика завершена посредством остановки перемещения робота-уборщика. Когда робот-уборщик еще не завершил уборку, работа по уборке соответственно выполняется посредством возврата к этапу восприятия препятствия.
Вышеописанный робот-уборщик, включающий в себя аудиовизуальную функцию, а так же и функцию уборки, позже был усовершенствован.
То есть робот-уборщик был усовершенствован, с тем чтобы посредством использования робота-уборщика многочисленное содержимое могло быть загружено путем подключения к внешней сети Интернет или беспроводной сети мобильной связи и, затем, воспроизведено или применено.
В дополнение, робот-уборщик использован для отслеживания изменения или перемещения окружения робота-уборщика посредством использования видеокамеры робота-уборщика.
В технологии для отслеживания изменения или перемещения окружения робота-уборщика посредством использования видеокамеры, встроенной в мобильного робота, такого как традиционный робот-уборщик, изображение на настоящий момент и будущее изображение, создаваемые посредством съемки отдельного предмета камерой, встроенной в мобильного робота, извлечены, и затем, перемещение отдельного предмета отслежено посредством выделения изображения разности извлеченных двух изображений. В это время участок, где отдельный предмет значительно перемещается, показывает большое значение изображения разности с тем, чтобы участок, где отдельный предмет значительно перемещается, выглядел белым.
Однако технология для отслеживания перемещения отдельного предмета традиционного мобильного робота требует длительного времени выполнения операций, поскольку она должна выполнять сличение «один к одному» между всеми пикселями извлеченного изображения на настоящий момент и извлеченного будущего изображения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Следовательно, целью настоящего изобретения является предоставление устройства для отслеживания перемещения мобильного робота способа для этого, допускающие не только значительное уменьшение величины операции сравнения пикселей, для того чтобы отслеживать перемещение отдельного предмета, но также и эффективно воспринимать перемещение отдельного предмета во всех направлениях посредством отслеживания перемещения отдельного предмета на основе изображения разницы пикселей, соответствующих границе предварительно установленной опорной зоны, из числа всех пикселей изображения на текущий момент, созданного посредством съемки отдельного предмета, и из числа всех пикселей предыдущего изображения отдельного предмета, которое было снято некоторое время назад.
Чтобы достичь этих и других преимуществ и в соответствии с назначением настоящего изобретения в качестве осуществленного и в общих чертах описанного в настоящем патентном документе, предоставлено устройство для отслеживания перемещения мобильного робота, содержащее: видеокамеру для съемки отдельного предмета; узел отслеживания перемещения и создания изображения для установки опорной зоны в изображении на настоящий момент, созданном посредством съемки отдельного предмета видеокамерой и выработки изображения на настоящий момент, в котором опорная зона установлена; узел выделения изображения разницы для выделения изображения разницы пикселей границы опорной зоны изображения на настоящий момент и пикселей опорной области предыдущего изображения; и микроЭВМ для отслеживания перемещения отдельного предмета на основании выделенного изображения разницы.
Чтобы достичь этих и других преимуществ и в соответствии с назначением настоящего изобретения, в качестве осуществленного и в общих чертах описанного в настоящем патентном документе предоставлен способ для отслеживания перемещения мобильного робота, содержащий: съемку отдельного предмета; задание опорной зоны в изображении на настоящий момент, сделанном посредством съемки отдельного объекта и выработки изображения на настоящий момент, в котором опорная зона задана; выделение изображения разности пикселей границы опорной зоны выработанного изображения на настоящий момент и пикселей границы опорной зоны предшествующего изображения, которое было записано некоторое время назад; и отслеживание перемещения отдельного предмета на основании выделенного изображения разницы.
Вышеизложенные и другие цели, признаки, аспекты и преимущества настоящего изобретения будут становиться более очевидными из последующего подробного описания настоящего изобретения при восприятии в соединении с сопутствующими чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопутствующие чертежи, которые включены в состав, чтобы обеспечить дополнительное осмысление изобретения, и включены в и составляют часть этого описания патента, иллюстрируют варианты осуществления изобретения и совместно с описанием служат, чтобы объяснять принципы изобретения.
На чертежах:
Фиг.1 - структурная схема, иллюстрирующая конструкцию устройства перемещения робота-уборщика в соответствии с традиционным уровнем техники;
Фиг.2 - последовательность операций способа, иллюстрирующая работу в отношении способа перемещения робота-уборщика в соответствии с традиционным уровнем техники;
Фиг.3 - структурная схема, иллюстрирующая конструкцию устройства для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением;
Фиг.4 - последовательность операций способа, иллюстрирующая работу в отношении способа для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее будет сделана подробная ссылка на предпочтительные варианты осуществления настоящего изобретения, примеры которых проиллюстрированы на сопутствующих чертежах.
В дальнейшем предпочтительные варианты осуществления устройства для отслеживания перемещения мобильного робота и способа для этого, допускающие не только значительное уменьшение количества работы по сравнению пикселей для того, чтобы отслеживать перемещение отдельного объекта и, к тому же, эффективно воспринимать перемещение отдельного предмета во всех направлениях посредством отслеживания перемещения отдельного объекта на основе изображения разности пикселей, соответствующих границе предварительно заданной опорной зоны из числа всех пикселей изображения на настоящий момент, созданного съемкой отдельного объекта, и из числа всех пикселей предшествующего изображения отдельного объекта, которое было снято некоторое время назад, будут описаны подробно со ссылкой на фиг.3 и 4.
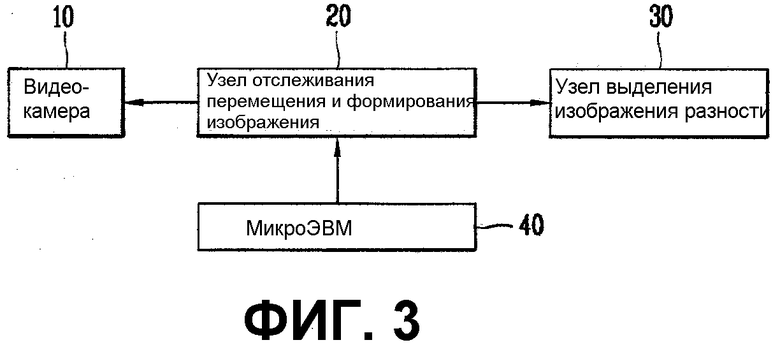
Фиг.3 - структурная схема, иллюстрирующая конструкцию устройства для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением.
Как показано на фиг.3, устройство для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением включает в себя: видеокамеру 10 для съемки отдельного объекта; узел 20 отслеживания перемещения и формирования изображения для задания опорной зоны в изображении на настоящий момент, созданного посредством съемки отдельного предмета видеокамерой, и формирования изображения на настоящий момент, в котором задана опорная зона; узел 30 выделения изображения разности для выделения изображения разности пикселей, соответствующих границе опорной зоны изображения на настоящий момент и пикселей, соответствующих границе опорной зоны предыдущего изображения; и микроЭВМ 40 для отслеживания перемещения отдельного предмета на основе выделенного изображения разницы.
В дальнейшем работа устройства для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением будет описана подробно.
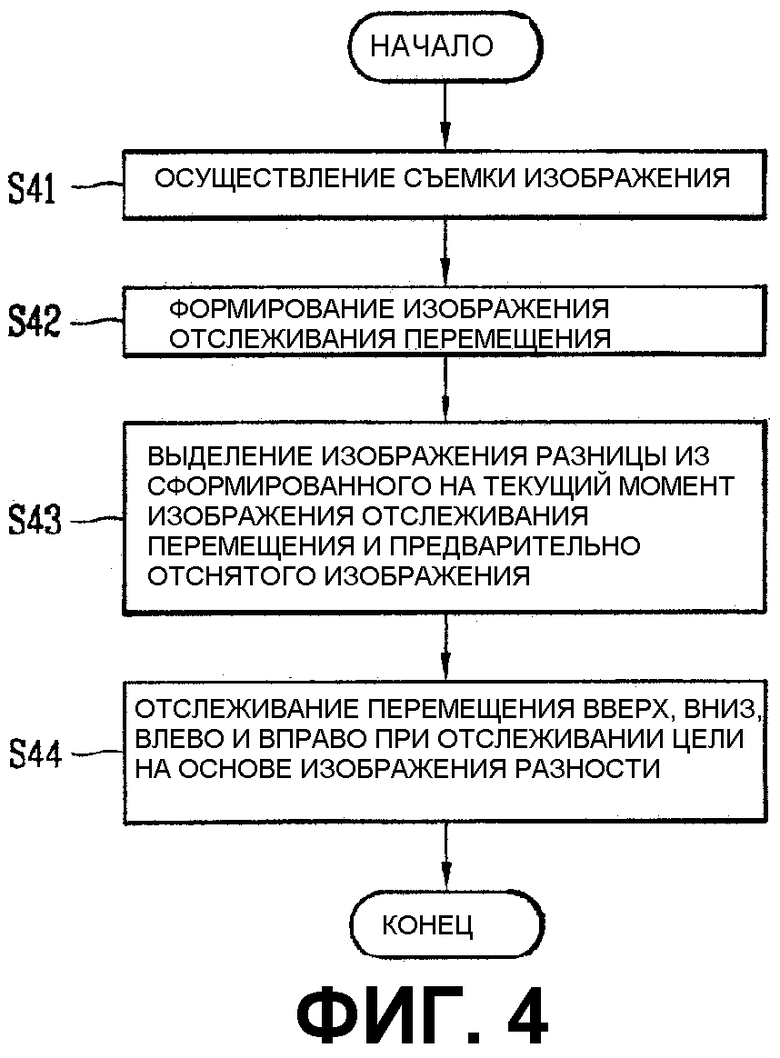
Фиг.4 - последовательность операций способа, иллюстрирующая работу в отношении способа для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением.
Как показано на фиг.4, способ для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением содержит: съемку отдельного объекта (S41); задание опорной зоны в изображении на настоящий момент, созданном посредством съемки отдельного предмета и формирования изображения на настоящий момент, в котором опорная зона задана (S42); выделение изображения разности пикселей, соответствующих границе опорной зоны сформированного изображения на настоящий момент и пикселей, соответствующих границе опорной зоны предшествующего изображения, которое было отснято некоторое время назад (S43); и отслеживание перемещения отдельного предмета на основе выделенного изображения разницы.
Способ для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением будет описан подробно, как следует ниже.
Сначала, когда пользователь выбирает режим для отслеживания перемещения мобильного робота, мобильный робот снимает перемещающийся отдельный предмет, чтобы получить изображение, посредством использования видеокамеры 10 (S41). Отснятое изображение отдельного предмета выведено в узел 20 отслеживания перемещения и формирования изображения.
Узел 20 отслеживания перемещения и формирования изображения задает опорную зону в введенном изображении отдельного предмета, для того чтобы отслеживать перемещение отдельного предмета (S42). Затем, узел 20 отслеживания перемещения и формирования изображения выводит изображение, в котором задана опорная зона, в узел 30 выделения изображения разности. В нем опорная зона, которая предварительно установлена пользователем, может быть оформлена в виде многоугольника и иметь переменный размер. В настоящем патентном документе опорная зона предпочтительно является прямоугольником.
Узел 30 выделения изображения разности сравнивает пиксели, соответствующие границе опорной зоны изображения на настоящий момент, в котором установлена опорная зона, в данный момент выданного из узла 20 отслеживания перемещения и формирования изображения, с пикселями, соответствующими границе опорной зоны предыдущего изображения, которое было отснято некоторое время назад, и затем выделяет изображение разницы на основании значения результата сравнения (S43). Узел 30 выделения изображения разницы выводит выделенное изображение разницы в микроЭВМ 40. В этом месте узел 30 выделения изображения разницы может сохранять информацию только о пикселях, соответствующих опорной зоне из числа всех пикселей предыдущего изображения или сохранять информацию о всех пикселях предыдущего изображения. Однако желательно сохранять информацию о пикселях, соответствующих опорной зоне из числа всех пикселей предыдущего изображения. В этом месте, поскольку выделение изображения разности между двумя изображениями является принадлежностью традиционного уровня техники, то описание для способа для выделения изображения разницы в настоящем патентном документе будет опущено.
МикроЭВМ 40 отслеживает перемещение отдельного предмета (например, влево, вправо, вверх и вниз) на основании введенного изображения разницы. В случае, когда опорная зона является прямоугольником, перемещение отдельного предмета отслеживается на основании разницы только между пикселями, существующими на верхней, нижней, правой или левой границе (S44).
В случае, когда опорная зона является прямоугольником в варианте осуществления, микроЭВМ 40 проверяет только разницу (изображение разницы) между пикселями, соответствующими четырем сторонам прямоугольника изображения на настоящий момент и пикселями, соответствующими четырем сторонам прямоугольника предыдущего изображения. В этом месте, если есть разница между пикселями, часть, показывающая разницу, выглядит белой в изображении разницы.
Более подробное описание будет продолжено с приведением примеров.
В случае, когда опорная зона задана посредством прямоугольника, который имеет размеры '150' на '100', устройство для отслеживания перемещения мобильного робота в соответствии с традиционным уровнем техники требует последовательности операций обработки сравнения 150×100=15000 пикселей изображения на настоящий момент и предыдущего изображения, для того чтобы отследить отдельный предмет.С другой стороны, устройство для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением требует операций сравнения только 500 пикселей, которые являются суммой, полученной сложением длин верхней, нижней, левой и правой сторон. В дополнение, когда отдельный предмет перемещается в пределах прямоугольника и не переходит через какую-либо из четырех сторон прямоугольника, то никакой разницы не имеет места между пикселями, соответствующими четырем сторонам прямоугольника изображения на настоящий момент и пикселями, соответствующими четырем сторонам прямоугольника предыдущего изображения. Следовательно, часть, выглядящая белой, не имеет места в изображении разницы. Поэтому микроЭВМ 40 игнорирует (не воспринимает) перемещение отдельного предмета и не перемещает видеокамеру 10. С другой стороны, когда отдельный объект переходит через правую сторону прямоугольника и перемещается, разница имеет место в пикселях, соответствующих правой стороне из четырех сторон прямоугольника между изображением на настоящий момент и предыдущим изображением, в силу чего имеет место изображение разницы. Поэтому микроЭВМ 40 воспринимает, что отдельный предмет переместился вправо и перемещает видеокамеру 10 вправо. Когда отдельный предмет переходит через верхнюю сторону прямоугольника и перемещается, имеет место разница в пикселях, соответствующих верхней стороне из четырех сторон прямоугольника, в силу чего изображение разницы имеет место. Поэтому микроЭВМ 40 воспринимает, что отдельный предмет переместился по направлению вверх, и перемещает видеокамеру 10 в верхнем направлении.
Тем же самым образом, когда отдельный предмет переходит через левую сторону прямоугольника и перемещается, микроЭВМ 40 перемещает видеокамеру 10 влево. Когда отдельный предмет переходит через нижнюю сторону прямоугольника и перемещается, микроЭВМ 40 перемещает видеокамеру 10 вниз. В этом месте пользователь может изменять размер прямоугольника.
Еще один вариант осуществления способа для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением будет описан, как приведено ниже.
Еще один вариант осуществления способа для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением содержит: съемку отдельного предмета; сравнение пикселей, соответствующих границе предварительно заданной опорной зоны из числа пикселей изображения на настоящий момент отдельного предмета, в данный момент являющегося снимаемым, с пикселями, соответствующими границе опорной зоны из числа пикселей предыдущего изображения отдельного предмета, который был отснят некоторое время назад; отслеживание перемещения отдельного предмета на основе результата сравнения.
В этом месте этап сравнения пикселей дополнительно содержит этап выделения только изображения разницы изображения, соответствующего опорной зоне изображения на настоящий момент и изображения, соответствующего опорной зоне предыдущего изображения. В этом месте способ для выделения изображения разности и работы видеокамеры мобильного робота на основе выделенного изображения разницы являются теми же самыми, как описанные до настоящего времени.
В настоящем изобретении перемещения отдельного предмета отслежено посредством восприятия разницы только пикселей, соответствующих границе опорной зоны из числа всех пикселей изображения на настоящий момент и предыдущего изображения после задания опорной зоны некоторого образца в изображении, полученном посредством съемки отдельного предмета.
Как описано подробно до настоящего момента, устройство для отслеживания перемещения мобильного робота в соответствии с настоящим изобретением и способ для этого могут значительно уменьшить объем работы по сравнению пикселей, для того чтобы отслеживать перемещение отдельного предмета и разумно воспринимать перемещение отдельного предмета во всех направлениях посредством отслеживания перемещения отдельного предмета на основе изображения разницы пикселей, соответствующих границе предварительно заданной опорной зоны из числа всех пикселей изображения на настоящий момент, полученного посредством видеосъемки отдельного предмета и из числа всех пикселей предыдущего изображения отдельного предмета, которое было снято некоторое время назад.
Так как настоящее изобретение может быть осуществлено в нескольких разновидностях, не выходя из его сущности или существенных признаков, то также должно быть понятным, что вышеописанные варианты осуществления не ограничены какими бы то ни было деталями предшествующего описания, если не указано иное, но могут быть дополнительно истолкованы в общих чертах в пределах сущности и объема, которые определены прилагаемой формулой изобретения, и, следовательно, все изменения и модификации, которые попадают в границы и пределы формулы изобретения или эквиваленты таким границам и пределам, поэтому имели намерением быть охваченными прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОЙ УБОРКИ, РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2014 |
|
RU2620236C1 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО ПЕРЕКЛЮЧЕНИЯ РЕЖИМОВ РАБОТЫ КАМЕРЫ | 2023 |
|
RU2809064C1 |
| Способ контроля пространственного положения участников спортивного события на игровом поле | 2016 |
|
RU2616152C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ ПОМЕЩЕНИЯ С ПАРКОВОЧНЫМ МОДУЛЕМ ДЛЯ РОБОТА-ПЫЛЕСОСА | 2010 |
|
RU2430672C1 |
| СИСТЕМА РОБОТА, СПОСОБНАЯ ОПРЕДЕЛИТЬ ОБЛАСТЬ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2321487C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ УБОРКИ | 2021 |
|
RU2833581C2 |
| ДВИЖУЩИЙСЯ ПРЕДМЕТ, СПОСОБНЫЙ РАСПОЗНАВАТЬ ИЗОБРАЖЕНИЕ, И СИСТЕМА НАВЕДЕНИЯ ДВИЖУЩЕГОСЯ ПРЕДМЕТА, ОСНАЩЕННАЯ ТАКОВЫМ | 2006 |
|
RU2321879C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2020 |
|
RU2809945C2 |
| СПОСОБ ПОЛУЧЕНИЯ ФОТО- ИЛИ ВИДЕОИЗОБРАЖЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ОБЪЕКТА СЪЕМКИ | 2015 |
|
RU2671551C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2005 |
|
RU2293647C1 |
Изобретение относится к мобильному роботу, такому как робот-уборщик, в частности к устройству для отслеживания перемещения мобильного робота. Техническим результатом является уменьшение времени операции сравнения пикселей и повышение эффективности восприятия перемещения, достигаемые за счет того, что предложенное устройство для отслеживания перемещения мобильного робота включает в себя: видеокамеру для съемки отдельного объекта; узел отслеживания перемещения и формирования изображения для задания опорной зоны в изображении на настоящий момент посредством съемки отдельного предмета видеокамерой и формирования изображения на настоящий момент, в котором опорная зона задана; узел выделения изображения разности пикселей границы опорной зоны изображения на настоящий момент и пикселей опорной зоны предыдущего изображения на основе разницы между пикселями присутствующими только на границе опорной зоны указанных изображений; и микроЭВМ для отслеживания перемещения отдельного объекта на основании выделенного изображения разницы. 5 н. и 15 з.п. ф-лы, 4 ил.
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПЕРЕМЕЩЕНИЙ ОБЪЕКТОВ | 1984 |
|
RU2140721C1 |
| Устройство для образования скважин в грунте | 1981 |
|
SU991017A1 |
| US 2004088080 A1, 06.05.2004 | |||
| СПОСОБ ПОЛУЧЕНИЯ О-АЛКИЛ-8-ОРГАНОХЛОРТИОФОСФАТОВ | 0 |
|
SU395372A1 |
| US 6008866 А, 28.12.1999 | |||
| JP 10177414 А, 30.06.1998 | |||
| КОБАЛЬТСОДЕРЖАЩЕЕ МИКРОУДОБРЕНИЕ | 2009 |
|
RU2392255C1 |
| US 5051906 А, 24.09.1991 | |||
| DE 19601005 А, 17.07.1997 | |||
| JP 2003269917 А, 25.09.2003. | |||

