Область техники, к которой относится изобретение
Настоящее изобретение относится к системе для наведения движущегося предмета, и более точно, к движущемуся предмету, способному распознавать изображение, и системе наведения движущегося предмета, оснащенной движущимся предметом.
Уровень техники
Типично, что робот, разработанный в промышленных целях, широко используется для осуществления автоматизации предприятия и собирает данные или информацию по поручению человека в экстремальной обстановке, которая является непереносимой для человека.
Вышеупомянутые роботизированные технологии использовались в космической промышленности и быстро развились в разных направлениях, приведя в итоге к разработке дружественных человеку домашних роботов.
Дружественный человеку подвижный робот использует аккумулятор для обеспечения подвижности в любом месте. Если напряжение аккумулятора равно или меньше, чем заданное напряжение, дружественный человеку подвижный робот запрограммирован на автоматическое возвращение к зарядному устройству, чтобы аккумулятор восстановил заряд.
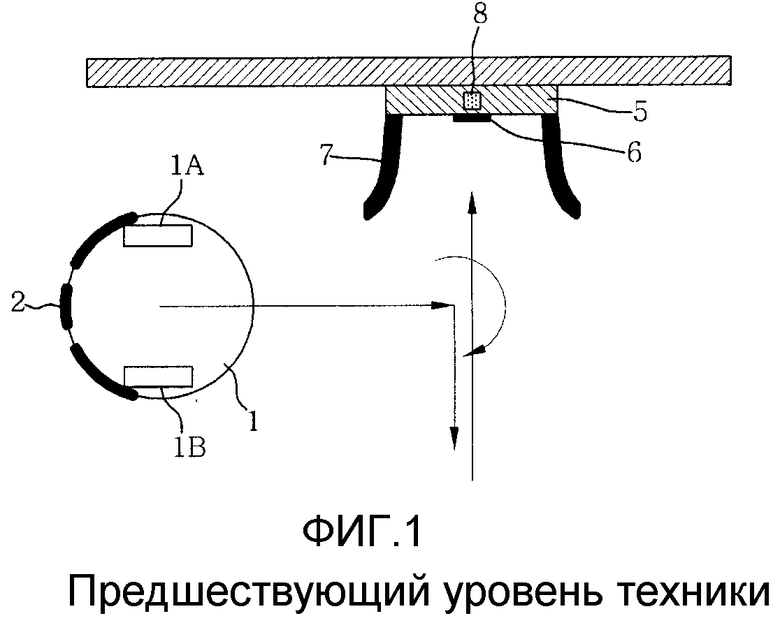
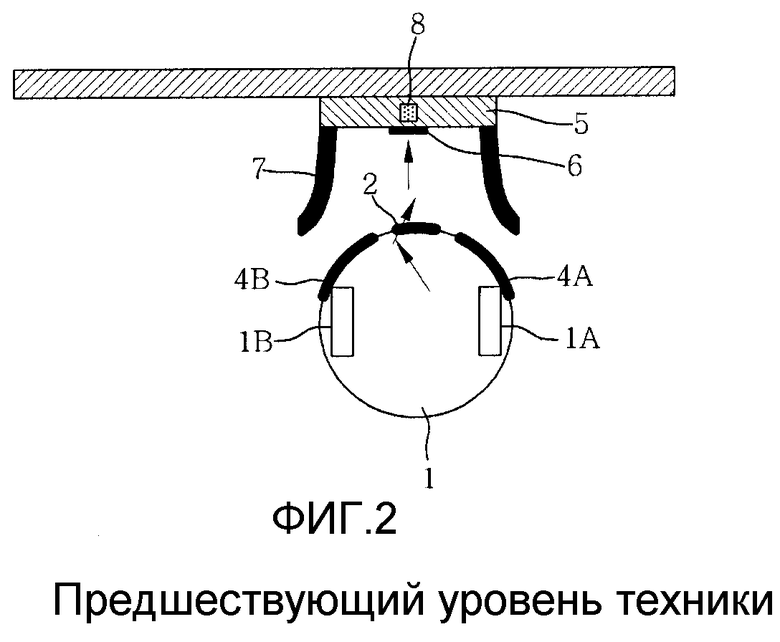
Фиг.1 и 2 являются схемами концептуального представления, иллюстрирующими обычный способ стыковки робота-уборщика, используемого в качестве примера подвижного предмета, с зарядным устройством.
Ссылаясь на фиг.1 и 2, робот-уборщик 1 принимает сигнал наведения от передатчика 8 сигнала наведения зарядного устройства 5, возвращается к местоположению зарядного устройства 5 и затем направляется к месту стыковки (т.е. к расположению вывода электропитания зарядного устройства) в соответствии с нижеследующим способом.
Другими словами, периферия условного робота 1 уборщика включает в себя дугообразный зарядный вывод 2 для подзарядки аккумулятора электричеством. Другими словами, одинаковые контактные датчики 4А и 4В для наведения робота-уборщика на место стыковки установлены с обеих сторон зарядного вывода 2. Вывод 6 электропитания установлен на передней панели зарядного устройства 5, и пара направляющих 7 установлена с обеих сторон зарядного устройства 5.
Следовательно, контроллер для управления общими операциями движения робота 1 уборщика поворачивает ведущие колеса 1А и 1В в прямом или обратном направлении, при касании контактных датчиков 4А и 4В направляющей 7, так что он регулирует направление движения робота 1 уборщика для соприкосновения вывода 6 электропитания с зарядным выводом 2 робота 1 уборщика.
Однако описанный выше обычный способ определяет, касаются ли контактные датчики 4А и 4В направляющей 7 без использования точных цифровых данных, и направляет робота 1 уборщика к месту стыковки в соответствии с обнаруженным результатом, так что происходит несколько раз излишнее перемещение в то время, когда зарядный вывод 2 стыкуется с выводом 6 электропитания.
Также направляющая 7 для наведения робота 1 уборщика на место стыковки должна быть установлена вместе с зарядным устройством 5, так что механическая структура зарядного устройства 5 усложнена, и зарядное устройство 5 может быть легко повреждено внешним ударом из-за спроектированной направляющей 7.
Раскрытие изобретения
Поэтому настоящее изобретение выполнено с учетом упомянутых проблем, и задачей изобретения является обеспечение движущегося предмета, способного к быстрому и правильному передвижению к месту стыковки с зарядным устройством, для распознавания изображения, и системы наведения движущегося предмета, оснащенной движущимся предметом.
Еще одной задачей изобретения является обеспечение движущегося предмета, способного к быстрому и правильному передвижению к месту стыковки, без механической модификации зарядного устройства или без использования дополнительного механического оборудования, и системы наведения движущегося предмета, оснащенной движущимся предметом.
В соответствии с одним аспектом настоящего изобретения вышеупомянутые и другие цели могут быть выполнены путем обеспечения движущегося предмета, способного распознавать изображение, содержащего: камеру для ввода изображения образа наведения стыковки, обеспечивающего наведение движущегося предмета на место стыковки; устройство выделения образа наведения стыковки для выделения образа наведения и его центральной точки на введенном изображении; дистанционно-информационное вычислительное устройство для вычисления данных расстояния от текущего местоположения до места стыковки в соответствии с отношением количества элементов изображения (пикселей) на выделенном образе наведения стыковки к количеству элементов изображения на введенном образе наведения стыковки в месте отсчета; и компенсационно-информационное вычислительное устройство для вычисления центральной точки на выделенном образе наведения стыковки, центральной точки, содержащейся на введенном изображении, и дистанционных данных расстояния до места стыковки, и вычисления данных смещения движущегося предмета относительно места стыковки; и привод колеса для выполнения операций с ведущим колесом движущегося предмета в соответствии с данными смещения и данными расстояния.
В соответствии с еще одним аспектом настоящего изобретения обеспечивается система наведения движущегося предмета, содержащая: зарядное устройство, на которое наносится образ наведения стыковки так, что центральная точка образа наведения стыковки для наведения движущего предмета на место стыковки и вывод электропитания расположены на прямой линии; и движущийся предмет для операций ведения колеса, чтобы предоставить возможность центральной точке образа наведения стыковки, введенного камерой, быть идентифицированной с центральной точкой изображения, введенного камерой, и для передвижения к месту стыковки.
Следовательно, система наведения движущегося предмета согласно настоящему изобретению управляет работой колеса, чтобы направлять движение центральной точки образа наведения стыковки, введенного камерой, так что он может быстро и правильно передвигаться к месту стыковки с зарядным устройством.
Кроме того, система наведения движущегося предмета в соответствии с настоящим изобретением использует образ наведения стыковки, нанесенный на зарядное устройство, так что он может быстро и правильно направлять движущийся объект к месту стыковки без механической модификации зарядного устройства или без использования дополнительного механического оборудования.
Краткое описание чертежей
Вышеупомянутые и другие цели, признаки и другие преимущества настоящего изобретения будут более понятны из последующего детального описания, выполненного вместе с сопроводительными рисунками, на которых:
фиг.1 и 2 являются схемами концептуального представления, иллюстрирующими обычный способ стыковки робота-уборщика, используемого в качестве примера подвижного предмета, к зарядному устройству;
фиг.3 является структурной схемой, иллюстрирующей движущийся предмет и зарядное устройство, включенное в систему наведения движущегося предмета в соответствии с предпочтительным вариантом осуществления настоящего изобретения;
фиг.4 является схемой концептуального представления, иллюстрирующей образ наведения стыковки, нанесенный на зарядное устройство, для облегчения стыковки движущегося предмета в соответствии с настоящим изобретением;
фиг.5 является блок-схемой, иллюстрирующей систему наведения движущегося предмета в соответствии с предпочтительным вариантом осуществления настоящего изобретения, и
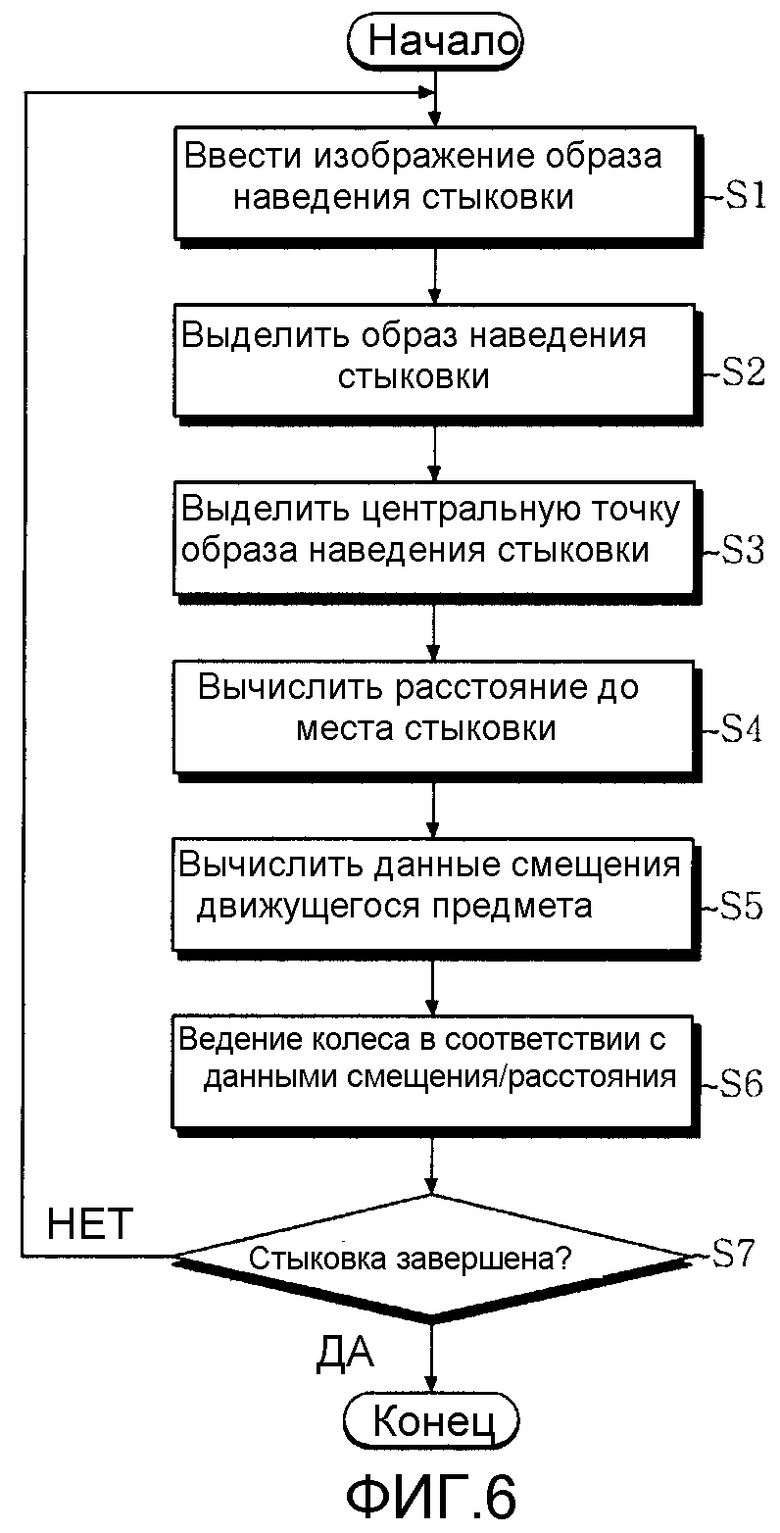
фиг.6 является блок-схемой, иллюстрирующей способ стыковки движущегося предмета с зарядным устройством в соответствии с настоящим изобретением.
Осуществление изобретения
Предпочтительный вариант осуществления будет подробно описан ниже со ссылками на прилагаемые чертежи. На чертежах одинаковые или подобные элементы обозначены одними и теми же ссылочными номерами, даже если они изображены на различных чертежах. В последующем описании детальное описание известных функций и конфигураций, включенных в настоящее описание, будет пропущено, если это может затруднить понимание сути предмета настоящего изобретения.
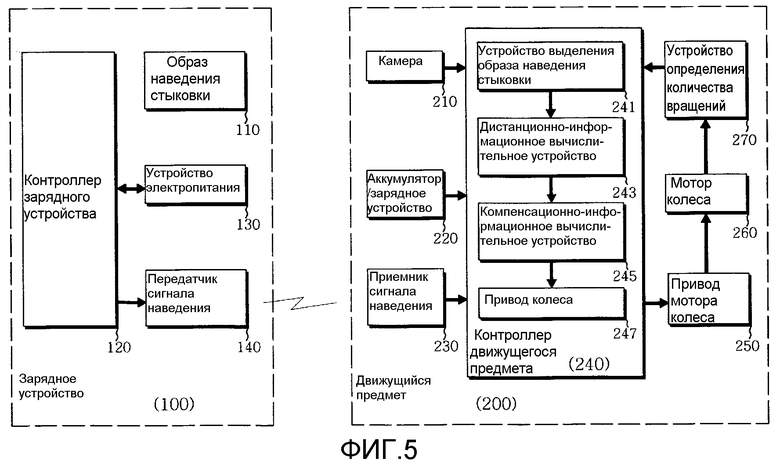
Фиг.3 является структурной схемой, иллюстрирующей движущийся предмет 200 и зарядное устройство 100, включенные в систему наведения движущегося предмета в соответствии с предпочтительным вариантом осуществления настоящего изобретения. Фиг.4 является схемой концептуального представления, иллюстрирующей образ (В) наведения 110 стыковки, нанесенный на зарядное устройство 100, для облегчения стыковки движущегося предмета 200 в соответствии с настоящим изобретением. Фиг.5 является блок-схемой, иллюстрирующей систему наведения движущегося предмета в соответствии с предпочтительным вариантом осуществления настоящего изобретения.
Ссылаясь на фиг.3, система наведения движущегося предмета главным образом включает в себя движущийся предмет 200, перемещаемый по заранее установленной области внутри заранее установленного диапазона, обусловленного уровнем заряда аккумулятора, и зарядное устройство 100 для подзарядки аккумулятора движущегося предмета 200.
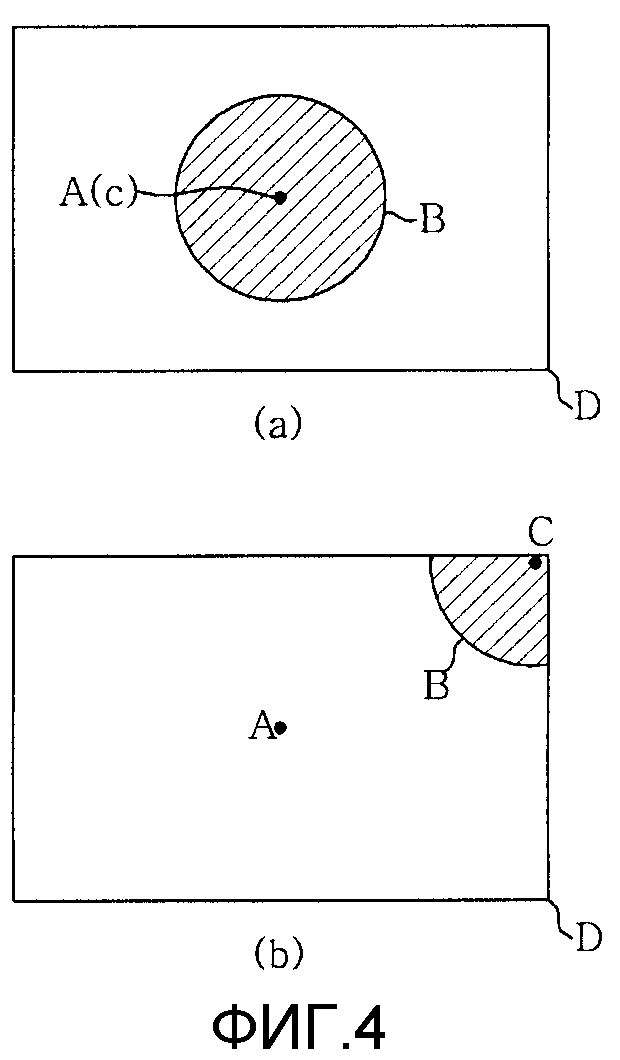
Образ В наведения 110 стыковки наносится на зарядное устройство 100 так, что вывод электропитания зарядного устройства 100 и центральная точка образа В наведения 110 стыковки находятся на вертикальной оси. Типичный пример образа В наведения 110 стыковки показан на фиг.4(а).
Образ В наведения стыковки используется как вспомогательный признак для наведения движущегося предмета 200 на место стыковки. Образ В наведения стыковки и центральная точка С окрашены по-разному, так что различный уровень яркости устанавливается для образа В наведения стыковки и для центральной точки С.
Причиной того, что образ В наведения стыковки и центральная точка С окрашены с различными уровнями яркости, является необходимость обнаружения угла смещения поворота движущегося предмета 200 по отношению к месту стыковки, используя центральную точку С.
Хотя в настоящем изобретении считается, что образ В наведения стыковки и центральная точка С окрашены с различными уровнями яркости, следует отметить, что образ В наведения стыковки и центральная точка С могут при необходимости окрашиваться с одинаковыми уровнями яркости.
В этом случае в настоящем изобретении применяется алгоритм для выделения формы образа наведения стыковки и обнаружения центральной точки на выделенной форме так, что она позволяет обнаруживать угол смещения поворота движущегося предмета 200 по отношению к месту стыковки.
Ссылаясь на фиг.5, зарядное устройство 100 включает в себя устройство 130 электропитания для обеспечения аккумулятора движущегося предмета 200 зарядным напряжением и контроллер 120 зарядного устройства для управления работой зарядного устройства 100. Зарядное устройство 100 может дополнительно включать в себя передатчик 140 сигнала наведения для передачи сигнала наведения стыковки (т.е. инфракрасный или ультразвуковой сигнал) в качестве дополнительного устройства, обеспечивающего быструю корректировку стыковки движущегося предмета 200.
Между тем, камера 210 для ввода изображения вышеупомянутого образа наведения стыковки устанавливается на наружной части робота-уборщика, действующего в качестве движущегося предмета 200, или помещается в основной корпус робота-уборщика.
Камера 210 устанавливается на наружной части робота-уборщика или помещается в основной корпус робота-уборщика, так что вывод электропитания зарядного устройства 100 и зарядный вывод движущегося объекта имеют возможность расположиться на прямой линии, и центральная точка А фиг.4(а) изображения, введенного камерой 210, идентична центральной точке С образа В наведения стыковки в заданном месте отсчета, расположенном в стороне от зарядного устройства 100 на заранее заданном расстоянии. Причиной конструкции подсоединения вышеупомянутой камеры 210 является необходимость обнаружения данных смещения движущегося предмета 200 путем определения центральной точки С образа наведения стыковки.
Для справки, вышеупомянутое место отсчета требуется для вычисления расстояния от текущего местоположения до места стыковки. Если количество элементов изображения на обнаруженном образе наведения стыковки в месте отсчета заранее вводится в память движущегося предмета 200, то расстояние до точки отсчета может быть вычислено по отношению количества введенных элементов изображения к количеству только что выделенных элементов изображения образа наведения стыковки. Например, указанное местоположение, в котором вывод электропитания зарядного устройства 100 соединяется с зарядным выводом движущегося предмета 200, может также определяться как место отсчета.
Как показано на фиг.5, движущийся предмет 200 включает в себя устройство 241 выделения образа наведения стыковки, информационно-дистанционное вычислительное устройство 243, компенсационно-информационное вычислительное устройство 245 и привод 247 колеса.
Устройство 241 выделения образа наведения стыковки выделяет образ В наведения стыковки и ее центральную точку С на изображении, введенном камерой 210. Дистанционно-информационное вычислительное устройство 243 вычисляет расстояние до места стыковки по отношению количества элементов изображения выделенного образа В наведения стыковки и количества элементов изображения образа наведения стыковки, введенной камерой 210 в месте отсчета. Компенсационно-информационное вычислительное устройство 245 вычисляет центральную точку с выделенного образа В наведения стыковки, центральную точку А введенного изображения и вычисляет дистанционные данные расстояния до места стыковки, так что он вычисляет данные смещения движущегося предмета относительно места стыковки. Привод 247 колеса управляет работой колеса движущегося предмета в соответствии с вышеупомянутыми данными смещения и вышеупомянутыми данными расстояния.
Движущийся предмет 200 может дополнительно включать в себя приемник 230 сигнала наведения, обеспечивающий прием сигнала наведения стыковки (т.е. инфракрасный или ультразвуковой сигнал) от передатчика 140 сигнала наведения зарядного устройства, так что он может быстро и правильно направлять операцию по стыковке.
Ссылочная позиция 220 на блок-схеме движущегося предмета 200 на фиг.5 указывает на аккумулятор для обеспечения движущегося предмета ведущей мощностью и на зарядное устройство для подзарядки аккумулятора. Ссылочная позиция 250 на фиг.5 указывает на привод мотора колеса для управления мотором колеса в соответствии с управляющим сигналом движения контроллера 240 движущегося предмета.
Ссылочная позиция 270 фиг.5 указывает на детектор 270 количества вращений, действующий как датчик положения, связанный с каждым левым и правым колесами. Детектор 270 количества вращений определяет количество вращений каждого левого и правого колеса и передает данные количества вращений, соответствующие определенному количеству вращений, контроллеру 240 движущегося предмета. Вышеупомянутые компоненты 220, 250 и 270 являются общими компонентами широкого применения обычного робота-уборщика, так что их детальное описание будет в настоящем описании опущено для удобства описания.
Фиг.6 является блок-схемой, иллюстрирующей способ наведения движущегося предмета 200 на место стыковки зарядного устройства в соответствии с настоящим изобретением.
Как показано на фиг.6, если напряжение в аккумуляторе равно или меньше, чем заданное напряжение, на этапе S1 камера 210 движущегося предмета 200 вводит изображение образа В наведения стыковки, нанесенное (или установленное) на зарядное устройство 100, в соответствии с сигналом управления контроллера 240 движущегося предмета. В этом случае на этапах S2 и S3 устройство 241 выделения образа наведения стыковки периодически выделяет образ наведения стыковки и его центральную точку С на введенном изображении.
Другими словами, поскольку устройство 241 выделения образа наведения стыковки заранее настроено на распознавание цветовых данных образа наведения стыковки, оно может выделять образ В наведения стыковки на изображении, используя заданный способ обнаружения границ областей с уровнем яркости и конкретными цветовыми данными. А центральная точка С образа В наведения стыковки имеет другой уровень яркости, отличный от вышеупомянутого уровня яркости образа В наведения стыковки, так что он может выделять центральную точку С на образе наведения стыковки.
Таким образом, на этапе S4, если образ В наведения стыковки и его центральная точка С выделены полностью, дистанционно-информационное вычислительное устройство 245 вычисляет данные расстояния от текущего местоположения до места стыковки по отношению количества элементов изображения выделенного образа В наведения стыковки к количеству элементов изображения образа наведения стыковки, введенному камерой в точке отсчета.
На этапе S5 компенсационно-информационное вычислительное устройство 245 вычисляет центральную точку С выделенного образа В наведения стыковки, центральную точку А во введенном изображении D и фактические дистанционные данные расстояния до места стыковки, так что он вычисляет данные смещения движущегося предмета 200 на основе местоположения С стыковки.
Например, если образ В наведения стыковки находится в правой верхней части введенного изображения D, как показано на фиг.4(b), то дистанционно-информационное вычислительное устройство 243 может вычислять дистанционные данные расстояния до фактического местоположения стыковки по отношению количества элементов изображения фактически введенного образа В наведения стыковки к количеству элементов изображения образа наведения стыковки, введенному камерой в точке отсчета, используя заранее заданный диапазон элементов изображения от центральной точки С образа наведения стыковки до границы образа наведения стыковки.
Если компенсационно-информационное вычислительное устройство 245 делит расстояние между центральными точками С и А, выделенными на этапе S3, с помощью данных расстояния, вычисленных дистанционно-информационным вычислительным устройством 243, и выражает результат деления значением арктангенса, то он может вычислять данные смещения движущегося предмета 200.
Если привод 247 колеса ведет колесо в соответствии с данными смещения, вычисленными компенсационно-информационным вычислительным устройством, и данными расстояния, вычисленными дистанционно-информационным вычислительным устройством на этапе S6, то движущийся предмет 200 постепенно располагается на прямой линии по отношению к месту С стыковки и двигается к месту стыковки.
Если даже движущийся предмет 200 и уходит от места С стыковки при вышеупомянутых операциях, то движущийся предмет 200 снова располагается на прямой линии по отношению к месту С стыковки и двигается к месту стыковки по такому пути, что движущийся объект 200 может пристыковаться к зарядному устройству 100.
Следовательно, система наведения движущегося предмета в соответствии с настоящим изобретением может быстро и правильно наводить движущийся предмет на заранее определенное место стыковки без механической модификации зарядного устройства или без использования дополнительного механического оборудования.
Как очевидно следует из вышеприведенного описания, система наведения движущегося предмета в соответствии с настоящим изобретением ведет колесо, прокладывая путь к центральной точке образа наведения стыковки, введенного камерой, так что он может быстро и правильно передвигаться к месту стыковки с зарядным устройством.
В дополнение, система наведения движущегося предмета в соответствии с настоящим изобретением использует образ наведения стыковки, установленный на зарядном устройстве, так что она может быстро и правильно наводить движущийся предмет на место стыковки без механической модификации зарядного устройства или без использования дополнительного механического оборудования.
Хотя предпочтительные варианты осуществления настоящего изобретения были раскрыты в иллюстративных целях, специалисты в данной области техники примут во внимание, что различные модификации, дополнения и замены возможны без отхода от содержания и сущности изобретения, как раскрывается в прилагаемой формуле изобретения.
Изобретение относится к системе наведения мобильного робота-уборщика, способного распознавать изображение. Техническим результатом является создание мобильного робота-уборщика, способного к быстрому и правильному передвижению к месту стыковки с зарядным устройством, для распознавания изображения. Предложен мобильный робот-уборщик, способный распознавать изображение, и система для его наведения, содержащая зарядное устройство, на которое напечатан образ наведения стыковки, так что центральная точка образа наведения стыковки для наведения движущегося предмета на место стыковки и вывод электропитания расположены на прямой линии, и движущийся предмет для операций ведения колеса, чтобы предоставить возможность центральной точке образа наведения стыковки, зафиксированного камерой, быть идентичной с центральной точкой изображения, зафиксированной камерой, и для передвижения к месту стыковки. Система наведения движущегося предмета ведет колесо, прокладывая путь к центральной точке образа наведения стыковки, зафиксированного камерой, так что он может быстро и правильно двигаться к месту стыковки с зарядным устройством. 2 н. и 8 з.п. ф-лы, 6 ил.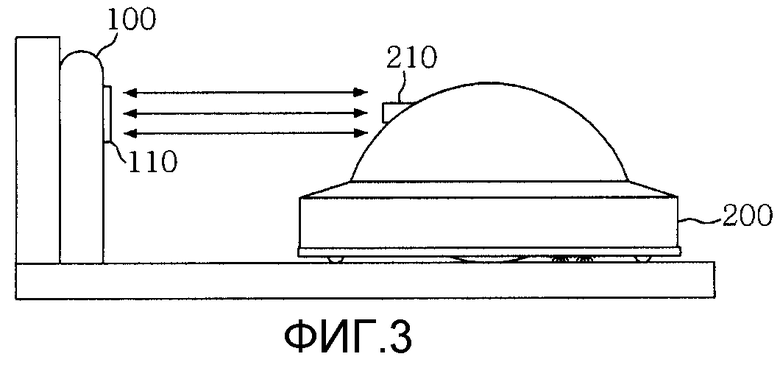
камеру для ввода изображения образа наведения стыковки, обеспечивающего наведение мобильного робота-уборщика на место стыковки;
устройство выделения образа наведения стыковки для выделения образа наведения стыковки и его центральной точки на введенном изображении;
дистанционно-информационное вычислительное устройство для вычисления данных расстояния от текущего местоположения до места стыковки в соответствии с отношением количества элементов изображения выделенного образа наведения стыковки к количеству элементов изображения образа наведения стыковки, введенного в месте отсчета, компенсационно-информационное вычислительное устройство для вычисления центральной точки выделенного образа наведения стыковки, центральной точки, содержащейся на введенном изображении, и данных расстояния до места стыковки, и вычисления данных смещения мобильного робота-уборщика относительно места стыковки; и
привод колеса для выполнения операций с ведущим колесом мобильного робота-уборщика в соответствии с данными смещения и данными расстояния,
причем устройство выделения образа наведения стыковки выделяет образ наведения стыковки на введенном изображении путем обнаружения границы областей с уровнем яркости, соответствующим цветовым данным образа наведения стыковки.
зарядное устройство, на которое нанесен образ наведения стыковки, так что центральная точка образа наведения стыковки для наведения мобильного робота-уборщика на место стыковки и вывод электропитания расположены по прямой линии; и
мобильный робот-уборщик для выполнения операций с ведущим колесом, чтобы центральная точка образа наведения стыковки, введенного камерой, могла быть идентичной центральной точке изображения, введенного камерой, и для передвижения к месту стыковки,
причем мобильный робот-уборщик содержит компенсационно-информационное вычислительное устройство, которое делит расстояние от центральной точки выделенного образа наведения стыковки до центральной точки введенного изображения на данные расстояния до места стыковки и выражает результат деления в виде значения арктангенса.
| СИСТЕМА РОБОТА-ПЫЛЕСОСА, ИМЕЮЩАЯ ВНЕШНЕЕ ЗАРЯДНОЕ УСТРОЙСТВО, И СПОСОБ СТЫКОВКИ С ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2240915C1 |
| СПОСОБ РАСПОЗНАВАНИЯ МЕТОК ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РОБОТА-ПЫЛЕСОСА И РОБОТ-ПЫЛЕСОС, ИСПОЛЬЗУЮЩИЙ ДАННЫЙ СПОСОБ | 2003 |
|
RU2248176C1 |
| СВАРНАЯ ПРОВОЛОЧНАЯ СЕТКА ДЛЯ ГАБИОНОВ | 2007 |
|
RU2398647C2 |
| JP 9198505 A, 31.07.1997 | |||
| US 2004016077 A1, 29.01.2004 | |||
| ХОРН Б.К.П | |||
| Зрение роботов | |||
| - М.: Мир, 1989, с.173-197. | |||

