Изобретение относится к автономным устройствам для перемещения транспортных средств.
Известен гараж, включающий размещенные одна над другой на осях с возможностью вращения платформы для размещения автомобилей, верхняя из которых оперта на стойки, а нижняя установлена между стойками, боковые натяжные элементы, соединяющие платформы, подъемное устройство, подъездной путь и фиксирующее устройство, при этом отношение длины верхней платформы к длине нижней составляет 0,6-0,75, а стойки верхней платформы установлены от ее центра тяжести на расстоянии 0,03-0,08 длины верхней платформы в сторону подъездного пути. (Авторское свидетельство №1054520, МПК Е04Н 6/06).
Однако в конструкции данного гаража применяются сложные и дорогостоящие механизмы.
Известен гараж, включающий платформу для автомобиля, установленную с возможностью поворота в вертикальной плоскости на оси, закрепленной на опорной стойке, фиксатор платформы, подъемное устройство и подъездной путь, при этом опорная стойка установлена от центра тяжести автомобиля на расстоянии 0,05-0,15 длины платформы в сторону, противоположную подъездному пути, а подъемное устройство соединено с концом платформы, обращенным к подъездному пути (Авторское свидетельство №1763620, МПК Е04Н 6/06 - прототип).
Однако для работы этой конструкции также необходимы дорогостоящие силовые агрегаты, данная конструкция стационарна, что ограничивает ее использование.
Данное изобретение направлено на снижение стоимости конструкции, упрощение ее обслуживания и ремонта.
Это достигается тем, что опрокидыватель снабжен непрямолинейными направляющими, установленными на стойке, снабженной колесами, расположенными в вертикальной плоскости, перпендикулярной к стороне заезда автомобиля, и силовой комплекс, а платформа, содержащая стационарный и подвижный противовесы, съемные крепежи автомобиля и регулятор скорости, связанный с поверхностью земли или с неповорачивающейся совместно с платформой частью опрокидывателя, соединена гибкой связью с направляющей.
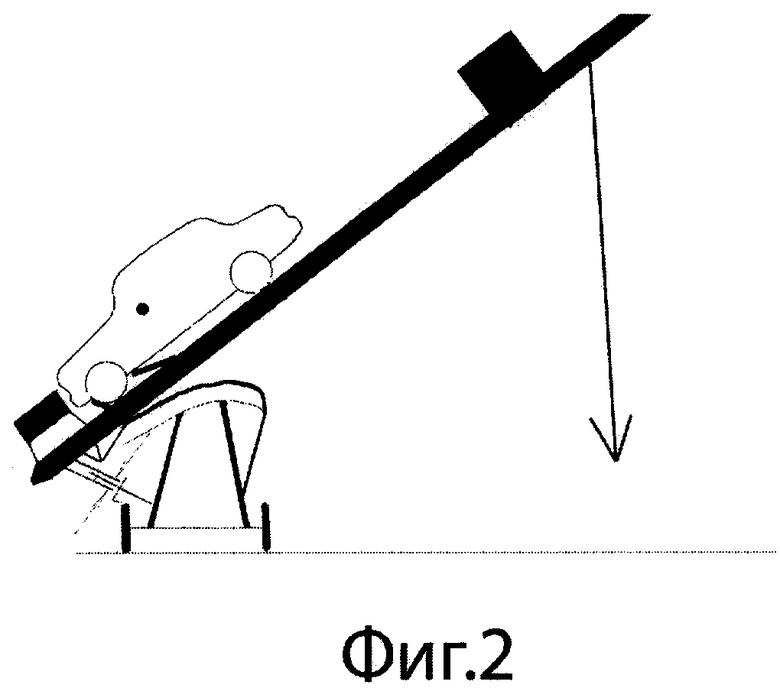
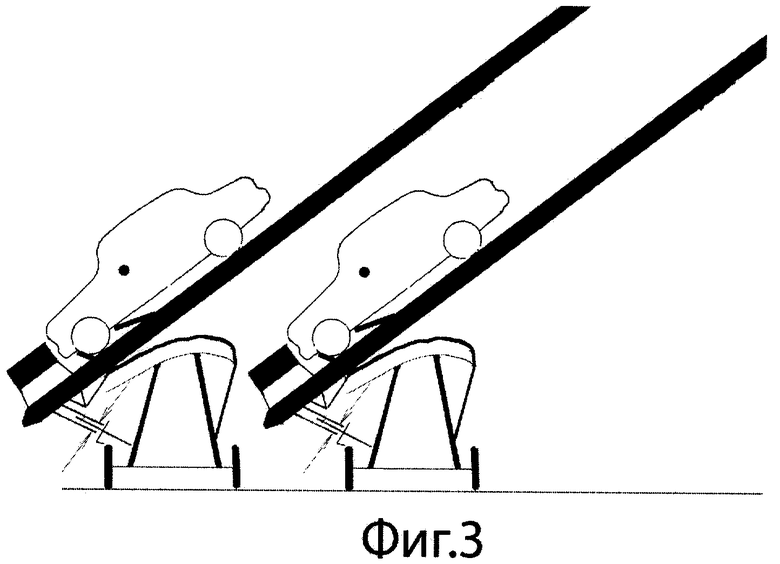
Изобретение иллюстрируется чертежом, где на фиг.1 показан общий вид опрокидывателя, на фиг.2 - опрокидыватель во время хранения автомобиля, на фиг.3 - положение опрокидывателей относительно друг друга во время хранения автомобилей.
Опрокидыватель включает платформу 1, стационарный противовес 2, неподвижный упор 3, непрямолинейные направляющие 4, стойку 5, гибкую связь платформы с направляющей 6, подвижный противовес 7, колеса 8, фиксатор платформы 9, тормозной механизм 10, съемный регулятор скорости 11, подвижный упор 12.
Автомобиль указан на фигурах контуром, центр тяжести платформы и автомобиля указан черным кружком, вертикальная линия, проходящая через точку контакта платформы и непрямолинейной направляющей, - вертикальной линией.
Подвижный упор 12 регулируемый. При завершении заезда автомобиля он фиксирует колесо. При съезде он растормаживает его. В положении хранения автомобиля подвижный упор 12 не работает.
Во время заезда автомобиля (фиг.1) центр тяжести платформы и автомобиля пересекает вертикальную линию, проведенную через точку контакта платформы и направляющей. Подвижный упор 12 пропускает колесо и фиксирует его.
Если бы платформа 1 вращалась вокруг неподвижной оси, то момент силы тяжести автомобиля относительно этой оси увеличивался по мере поворота, так как плечо этой силы увеличивалось. В этом случае возвратить платформу в первоначальное положение для съезда автомобиля было бы затруднительно. Чтобы этого не происходило, платформа, поворачиваясь, перемещается по непрямолинейным направляющим 4. При этом точка контакта платформы 1 и направляющей 4 во время поворота перемещается в сторону поворота вслед за центром массы автомобиля и платформы 4. При этом момент силы тяжести автомобиля и платформы остается в приемлемых величинах и платформу можно вернуть в первоначальное положение вручную.
Для осуществления поворота снимают упор 9 платформы. Скорость поворота регулируется регулятором скорости 11. Регулятор скорости может быть выполнен в виде фрикционного тормоза 10 (он показан на чертеже) или в виде анкерного механизма (на чертеже не показан).
Регулировка центра тяжести платформы и автомобиля осуществляется также предварительным перемещением подвижного груза 7 по платформе. При этом увеличивается или уменьшается момент сил тяжести платформы и автомобиля.
После поворота автомобиль упирается в неподвижный упор 3.
Для того чтобы платформа с автомобилем не перемещалась вдоль направляющей 4, платформу и направляющую соединяют гибкой связью 6. Она огибает (фиг.2) направляющую 4 и удерживает платформу 1.
Для возвращения платформы в исходное положение достаточно ручного привода. Он обозначен стрелкой, направленной вниз.
Для промежуточной фиксации платформы в этом положении устанавливается груз 7. В дальнейшем платформу стопорит фиксатор 9.
После установки опрокидывателя в состояние хранения он может перемещаться на колесах 8. Движение происходит на и от смотрящего на фиг.2. После установки опрокидыватели занимают относительно друг друга положение, указанное на фиг.3. Для снятия автомобиля освобождают пространство около опрокидывателя перемещением его и соседних опрокидывателей. Для этого используется силовой комплекс. Это может быть ручной привод через лебедку или привод двигателя через редуктор.
Для хранения опрокидывателя платформа поворачивается. Для этого установлен стационарный противовес 2, благодаря чему для поворота достаточно ручного привода.
Данное изобретение позволяет снизить стоимость конструкции, облегчить ее обслуживание и ремонт, улучшить потребительские свойства.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЛАНСИРНЫЙ ФИКСАТОР | 2005 |
|
RU2306539C1 |
| ГАРАЖ | 2008 |
|
RU2402665C2 |
| Гараж | 1989 |
|
SU1763620A1 |
| МНОГОЯРУСНАЯ АВТОМАТИЗИРОВАННАЯ АВТОСТОЯНКА МОДУЛЬНОГО ТИПА | 2008 |
|
RU2376430C1 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2010 |
|
RU2459916C1 |
| НАВЕС АВТОМОБИЛЬНЫЙ ЗИМНИЙ | 2016 |
|
RU2614179C1 |
| СПОСОБ ХРАНЕНИЯ АВТОМОБИЛЕЙ В ОТДЕЛЬНЫХ ВЗАИМОСВЯЗАННЫХ МОДУЛЯХ | 2011 |
|
RU2506386C2 |
| МНОГОЭТАЖНАЯ АВТОСТОЯНКА | 2005 |
|
RU2304206C1 |
| АВТОМАТИЗИРОВАННАЯ СТОЯНКА ДЛЯ АВТОМОБИЛЕЙ | 2017 |
|
RU2641155C1 |
| ЛИФТ-ГОЛЬДЕР | 2014 |
|
RU2539429C1 |
Изобретение относится к автономным устройствам для перемещения транспортных средств. Опрокидыватель включает стойку, платформу для автомобиля, установленную с возможностью поворота в вертикальной плоскости, фиксатор платформы. Опрокидыватель снабжен непрямолинейными направляющими, установленными на стойке, которая снабжена колесами, расположенными в вертикальной плоскости, перпендикулярной к стороне заезда автомобиля, а также силовым комплексом для перемещения опрокидывателя. Платформа содержит стационарный и подвижный противовесы, съемные подвижный и неподвижный упоры автомобиля и регулятор скорости, связанный с поверхностью земли или с неповорачивающейся совместно с платформой частью опрокидывателя. Платформа соединена гибкой связью с направляющей. Регулятор скорости может быть выполнен в виде фрикционного тормоза или анкерного механизма. Достигается снижение стоимости конструкции, упрощение ее обслуживания и ремонта, улучшение потребительских свойств. 2 з.п. ф-лы, 3 ил.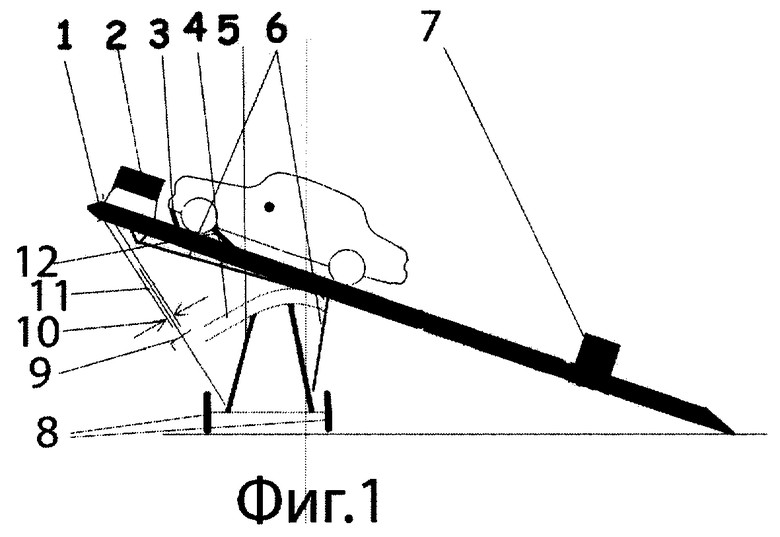
| Гараж | 1989 |
|
SU1763620A1 |
| JP 5193463 A, 03.08.1993 | |||
| Устройство для поперечного перемещения транспортного средства | 1983 |
|
SU1167078A1 |
| РОЛЬФ ВАЛЕФЕЛЬД И ФРИДРИХ ЖАК | |||
| "Гаражи и автозаправочные станции" (проектирование, строительство и оборудование) | |||
| - М., Научно-техническое издательство автотранспортной литературы, 1957, с.102-103, рис.122 (а, б). | |||

