Изобретение относится к области строительства, а именно к конструкциям механизированных гаражей или стоянок.
Известен механизированный модульный гараж, содержащий модули для хранения автомобилей, состоящий каждый из основания, несущих стоек, крыши с листом дорожного покрытия, приводом вертикального перемещения, выполненного в виде гидроцилиндров и подъездных путей, причем крыша жестко связана с несущими стойками (см. патент на изобретение RU №2352740, кл. E04H 6/06, 2007 г.). Этот гараж является сложным сооружением, поскольку требуется возведения дорогостоящих туннелей.
Наиболее близким техническим решением (прототипом) является механизированный модульный гараж, выполненный в виде отдельных взаимосвязанных модулей для хранения автомобилей, каждый из которых содержит основание, две боковые панели, крышу, тележку с рамой, привод тележки и грузовую платформу, установленную на раме, причем основание снабжено рельсами, а тележка выполнена с возможностью перемещения по рельсам, при этом каждая из боковых панелей своей одной стороной жестко связана с одной из сторон основания, а другой, противоположной, стороной с крышей (см. патент на изобретение RU №2360086, кл. E04H 6/32, 2006 г.). Этот механизированный модульный гараж конструктивно сложен и не надежен и требует вложения, при его строительстве, больших материальных затрат. Основными задачами предполагаемого изобретения является увеличение надежности и упрощения конструкции механизированного модульного гаража, а также является уменьшение стоимости механизированного модульного гаража и сокращение срока его строительства.
Задачи изобретения достигаются тем, что механизированный модульный гараж выполнен в виде отдельных взаимосвязанных модулей для хранения автомобилей, каждый из которых содержит основание, две боковые панели, крышу, тележку с рамой, привод тележки и грузовую платформу, установленную на раме, причем основание модуля снабжено рельсами, а тележка выполнена с возможностью перемещения по рельсам, при этом каждая из боковых панелей, своей одной стороной, жестко связана с одной из сторон основания, а другой, противолежащей стороной, жестко связана с крышей, причем модули жестко соединены между собой, свободными и соответствующими сторонами оснований, боковых панелей и крыш, образуя последовательное соединение этих модулей, при котором последний модуль присоединен к первому модулю, причем каждый модуль снабжен передними и задними вертикальными стойками, каждая из которых сопряжена с боковой панелью, а торцами своих концов жестко взаимосвязана с основанием и крышей, при этом рельсы жестко установлены на основании в два ряда, с возможностью передачи электроэнергии и параллельны между собой, они также сопряжены с рельсами смежных модулей, образуя замкнутый рельсовый путь, причем привод каждой тележки установлен на самой тележке, а каждая грузовая платформа снабжена направляющими балками и механизмом фиксации, установленными на этой грузовой платформе, предназначенной для хранения автомобиля, располагаемого на ней поперек направления движения тележек модулей, при этом боковая панель одного из модулей механизированного модульного гаража выполнена со специальным проемом для обеспечения въезда или выезда автомобилей из механизированного модульного гаража, а рельсы этого модуля снабжены стопорным механизмом.
Механизированный модульный гараж может быть снабжен специальным модулем, содержащим основание с прямоугольным вырезом и специальным поддоном, выполненным в виде прямоугольной ванны, а также подпружиненные ролики, крышу с прямоугольной выемкой, грузовую платформу с посадочными бортиками и специальными выемками, передние и задние несущие стойки с дополнительными балками, электромеханические замки с подпружиненными защелками, при этом крыша и грузовая платформа выполнены с возможностью вертикального перемещения и снабжены дополнительным приводом вертикального перемещения, причем прямоугольный вырез основания, по его краям, сопряжен с краями верхней части прямоугольной ванны специального поддона, в котором смонтирован дополнительный привод вертикального перемещения, выполненный в виде гидроцилиндров, а рама тележки этого модуля и всех других модулей выполнена со сквозными отверстиями, при этом штоки этих гидроцилиндров выполнены сопрягаемыми с отверстиями всех упомянутых рам и выполнены с возможностью сопряжения со специальными выемками каждой грузовой платформы, при ее подъеме, причем передние и задние несущие стойки жестко и вертикально установлены по углам соответственно каждой грузовой платформы, при этом каждый свободный конец этих стоек выполнен с изгибом, причем каждый конец передних несущих стоек наклонен в сторону задних несущих стоек, а каждый конец задних несущих стоек наклонен в сторону передних несущих стоек и все эти концы жестко соединены между собой дополнительными балками, образующими обвязку концов этих передних и задних несущих стоек, выполненную сопрягаемой с прямоугольной выемкой крыши, при подъеме грузовой платформы, при этом на концах передних и задних вертикальных стоек установлены подпружиненные ролики, каждый из которых выполнен сопрягаемым с соответствующей вертикальной частью, передней или задней, несущей стойкой, причем установленные на этих вертикальных стойках электромеханические замки своими подпружиненными защелками выполнены сопрягаемыми с грузовой платформой. Стопорный механизм механизированного модульного гаража содержит подпружиненные стопорные штыри, рычаг и якорь с электромагнитом, а рельсы модуля выполнены со сквозными вертикальными отверстиями, при этом электромагнит установлен на этих рельсах, а стопорные штыри выполнены сопрягаемыми с упомянутыми сквозными вертикальными отверстиями и с возможностью вертикального перемещения, а конец каждого стопорного штыря, посредством рычага, взаимосвязан с якорем электромагнита, причем другой конец каждого стопорного штыря выполнен с возможностью контакта с колесами тележки модуля.
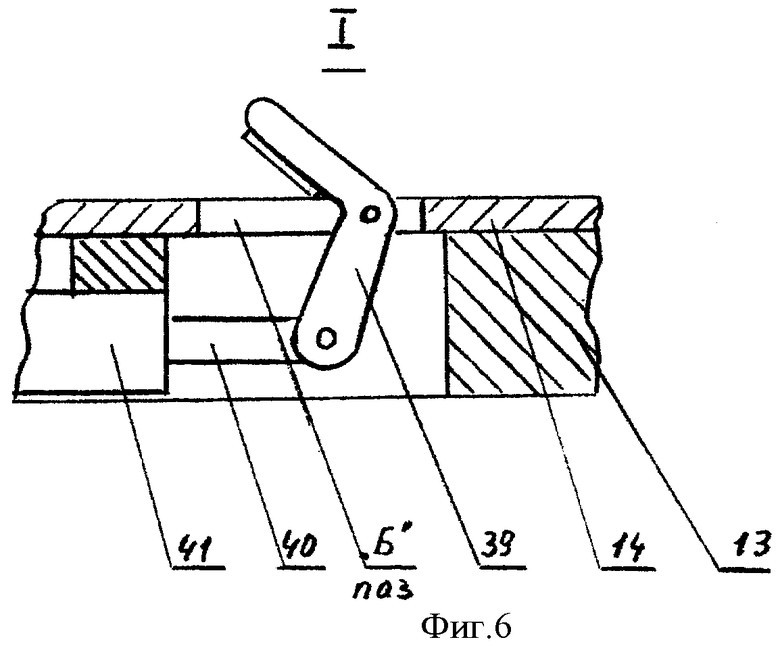
Механизм фиксации автомобилей на грузовой платформе каждого модуля содержит ограничительный брус и управляемые упоры, причем каждый управляемый упор снабжен «Г»-образным рычагом с пластиной захвата и силовым гидроцилиндром, а грузовая платформа выполнена с пазами, сопрягаемыми с каждым «Г»-образным рычагом, установленным на оси, в одном из этих пазов и с возможностью поворота в вертикальной плоскости, при этом один из его концов шарнирно взаимосвязан со штоком силового гидроцилиндра, установленного на грузовой платформе, причем другой конец этого рычага жестко соединен с пластиной захвата и выполнен с возможностью контакта с колесом автомобиля.
Грузовая платформа может быть установлена с наклоном в сторону заезда автомобиля, а крыша модуля может быть выполнена съемной.
Каждая тележка модуля механизированного модульного гаража может содержать экран, который жестко установлен по краю грузовой платформы и расположен поперек направления движения тележек модуля, при этом экран выполнен сопрягаемым с проемом модулей и обеспечивает свободное перемещения тележек модулей.
Изобретение поясняется чертежами.
На фиг.1 изображен модуль гаража в сборе с боковым заездом автомобиля в механизированный модульный гараж, со стороны смежного модуля (одна из направляющих балок 15 условно снята; въездные ворота не показаны).
На фиг.2 изображено сечение А-А. Общий вид нескольких модулей гаража (боковая панель 20 со специальным проемом условно не показана).
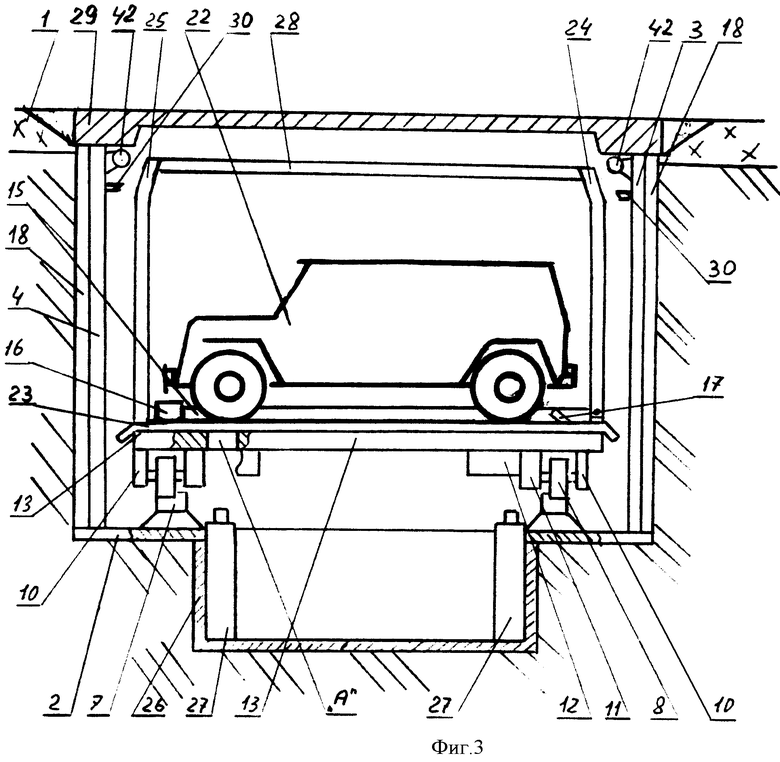
На фиг.3 изображен специальный модуль механизированного модульного гаража в сборе, со стороны смежного модуля (поворотная пластина поз.9 условно не показана).
На фиг.4 изображен заезд автомобиля в специальный модуль механизированного модульного гаража (поворотная пластина поз.9 условно не показана).
На фиг.5 изображена конструкция стопорного механизма.
На фиг.6 изображена конструкция управляемого упора.
На фиг.7 вариант плана расположения механизированного модульного гаража в городском жилом комплексе.
Механизированный модульный гараж расположен в подземном пространстве дороги 1 (фиг.1). Механизированный модульный гараж выполнен в виде отдельных взаимосвязанных и унифицированных модулей, жестко соединенных между собой в одну замкнутую цепь. Каждый из этих унифицированных модулей состоит из основания 2 прямоугольной формы с жестко закрепленными на нем, по углам, передними вертикальными стойками 3 и жестко закрепленными, также на этом основании 2, по его углам, задними вертикальными стойками 4. На свободных концах этих стоек 3 и 4 установлена крыша 5. Две балки 6 выполнены из изоляционного материала и установлены параллельно между собой на основании 2, и жестко связаны с рельсами 7, установленными также параллельно между собой. Рельсы 7 выполнены сопрягаемыми с колесами 8 тележки модуля и токосъемниками (не показаны), при этом каждое колесо 8 установлено на поворотной пластине 9 посредством опоры 10 и опорного редуктора 11 привода тележки модуля, включающими также этот привод и электродвигатель 12, причем каждое колесо 8 тележки модуля взаимосвязано с электродвигателем 12 посредством опорного редуктора 11. Поворотная пластина 9 установлена с возможностью поворота на раме 13 тележки модуля. Грузовая платформа 14 установлена на раме 13, и на этой грузовой платформе 14 смонтированы две направляющие балки 15 и установлен механизм фиксации автомобиля, выполненный в виде ограничительного бруса 16 и двух управляемых упоров 17 (возможен вариант установки управляемых упоров 17 вместо ограничительного бруса). На передних вертикальных стойках 3 смонтирована боковая панель 18 (на фиг.1 не показано), при этом и на задних вертикальных стойках 4 смонтирована также боковая панель 18. Для обеспечения пожарной безопасности и разделения площади механизированного модульного гаража на боксы предусмотрен экран 19 (фиг.2), жестко установленный на краю грузовой платформы 14 и расположенный поперек направления движения тележек модуля, при этом форма экрана 19 повторяет форму рабочего проема модулей механизированного модульного гаража и меньше его в размерах, вследствие этого экран 19 не препятствует перемещению тележки модуля с автомобилем. Для бокового въезда или выезда автомобиля, в механизированном модульном гараже предусмотрена установка боковой панели 20, выполненной со специальным проемом для проезда автомобиля. Монтаж боковой панели 20 может быть выполнен на передние вертикальные стойки 3 либо на задние вертикальные стойки 4, либо на все необходимые стойки, вместо боковой панели 18 (панелей 18), т.е. возможен на любые модули механизированного модульного гаража. К модулю, с боковой панелью 20, со специальным проемом, подведен туннель с дорогой 21. Въезд (выезд) автомобиля 22 в механизированный модульный гараж ограничивается въездными воротами (не показано). При стыковке модулей механизированного модульного гаража рельсы 7 смежных модулей соединяются между собой и составляют единую целую замкнутую рельсовую дорогу. При монтаже механизированного модульного гаража могут применяться необходимые дополнительные вставки из дополнительных оснований, боковых панелей, крыш и рельсов между модулями (например, при расположении смежных модулей под углом), конструкция которых является предметом необходимого простого проектирования и зависит только от расположения механизированного модульного гаража на конкретной местности, а поэтому не может являться предметом изобретения, а поэтому в данных материалах не рассматривается.
При расположении автомобилей на грузовой платформе вдоль направления движения тележек модулей (а также при любом расположении автомобилей на грузовой платформе относительно направления движения тележек модулей), заезд и выезд автомобилей в механизированный модульный гараж возможен только при использовании специального модуля, это так называемый «шахтный» заезд или выезд. Специальный модуль (фиг.3) отличается от унифицированного модуля использованием грузовой платформы 23 с посадочными бортиками, установленными по ее периметру, и выполненных на ней специальных выемок, а также выполнения грузовой платформы 23 с возможностью вертикального перемещения. На этой грузовой платформе 23, в передней ее части, жестко установлены по ее углам, посредством своих концов, передние несущие стойки 24, а в задней ее части - задние несущие стойки 25, причем свободные концы всех этих стоек выполнены с изгибом, одни в сторону других, то есть концы передних несущих стоек 24 наклонены в сторону задних несущих стоек 25, а концы задних несущих стоек 25 наклонены в сторону передних несущих стоек 24. Посадочные бортики этой грузовой платформы 23 выполнены для точной ориентации и фиксации, при опускании ее на раму 13, при этом они еще служат ограничителем вертикального подъема грузовой платформы 23. Основание 2 снабжено специальным поддоном 26, выполненным в виде прямоугольной ванны, а также дополнительным приводом, выполненным в виде гидроцилиндров 27, предназначенных для вертикального перемещения грузовой платформы 23. Гидроцилиндры 27 установлены в специальном поддоне 26. На свободных концах передних несущих стоек 24 и задних несущих стоек 25 жестко смонтирована обвязка из дополнительных балок 28, причем каждая дополнительная балка 28 своими концами жестко связывает смежные несущие стойки 24 и 25. На основании 2 прямоугольной формы жестко закреплены, по его углам, передние и задние вертикальные стойки 3 и 4. На этих стойках 3 и 4 смонтированы соответственно боковые панели 18. Верхние концы передних и задних вертикальных стоек 3 и 4, а также верхние торцевые поверхности боковых панелей 18 выполнены сопрягаемыми с крышей 29. Крыша 29 выполнена с прямоугольной выемкой и с возможностью вертикального перемещения и сопряжения, посредством этой выемки, с обвязкой из дополнительных балок 28. Основание 2 выполнено с прямоугольным вырезом, периметр края которого сопряжен с верхней частью периметра края прямоугольной ванны специального поддона 26. Для обеспечения взаимодействия гидроцилиндров 27 с грузовой платформой 23 и осуществления ее перемещения в вертикальной плоскости, в раме 13 выполнены отверстия "А", обеспечивающие необходимый свободный проход штоков гидроцилиндров 27 для контакта со специальными выемками (не показано) упомянутой грузовой платформой 23, при ее подъеме (фиг.4). Для обеспечения механической фиксации грузовой платформы 23, при поднятии ее до уровня дороги 1 (т.е. до максимальной высоты), предусмотрены стандартные электромеханические замки 30 с подпружиненными защелками. Для обеспечения соединения тележек модулей между собой (фиг.2), при движении по рельсам 7, на раме 13 каждой тележки модуля установлены, с двух противоположных ее сторон, сцепные устройства 31. Специальный модуль и модуль с боковыми панелями 20 со специальным проемом снабжены стопорными механизмами 32 (фиг.5), состоящими каждый из стопорных штырей 33, рычага 34, якоря 35 электромагнита 36, закрепленного на рельсе 7 с помощью кронштейна 37, причем пружина 38 установлена на якоре 35 между рычагом 34 и кронштейном 37. На концах рельсов 7, смонтированных в этих указанных модулях, выполнены вертикальные сквозные отверстия и установлены в них, с возможностью вертикального перемещения, стопорные штыри 33, (по два штыря 33 на каждый стопорный механизм 32). Один конец каждого стопорного штыря 33 взаимосвязан с якорем 35 электромагнита 36, посредством рычага 34, а другой конец стопорного штыря 33 выполнен с возможностью взаимодействия с колесом 8 тележки модуля, например, в обесточенном состоянии, стопорный штырь 33 находится постоянно в выдвинутом положении за счет упругости пружины 38 и тем самым ограничивает передвижения колеса 8 тележки модуля. Положение стопорных штырей контролируется датчиками (не показано). Каждый управляемый упор 17 механизма фиксации автомобилей на грузовой платформе 14 или грузовой платформе 23 (фиг.6) состоит из «Г»-образного рычага 39 с пластиной захвата (пластина захвата не показана и устанавливается только для увеличения площади захвата) и привода фиксации, а указанная грузовая платформа 14 и грузовая платформа 23 выполнены с пазами «Б», причем каждый «Г»-образный рычаг 39 установлен на оси (не показано) в одном из этих пазов «Б» с возможностью поворота в вертикальной плоскости, а привод фиксации содержит шток 40 гидроцилиндра 41, причем «Г»-образный рычаг 39 одним из своих концов шарнирно взаимосвязан со штоком 40 гидроцилиндра 41, а свободный конец «Г»-образного рычага жестко соединен с пластиной захвата и выполнен сопрягаемым с упомянутым выше пазом «Б». В обесточенном состоянии механизированного модульного гаража, «Г»-образный рычаг 39 находится в крайнем верхнем положении, а штоки 40 гидроцилиндра 41 находятся при этом в крайне минимальном выдвинутом положении (фиг.6).
На верхних концах передних и задних вертикальных стоек 3 и 4 установлены электромеханические замки 30, а также подпружиненные ролики 42, выполненные сопрягаемыми с вертикальными частями передних и задних стоек 24 и 25. Для упрощения фиксации автомобиля на грузовой платформе 14 или грузовой платформе 23 эти грузовые платформы 14 или 23 могут быть выполнены с наклоном в сторону заезда автомобиля (не показано). При этом автомобиль, заехав на грузовую платформу 14 или грузовую платформу 23, будет упираться в ограничительный брус 16 (или управляющий упор 17, в случае его установки вместо ограничительного бруса 16)) и за счет собственного веса и наклона грузовой платформы 14 или грузовой платформы 23 автомобиль 22 будет находиться в зафиксированном положении.
Для упрощения монтажа-демонтажа тележек модулей, из механизированного модульного гаража, крыша 5 может быть выполнена легкосъемной.
На фиг.7 рассмотрен возможный вариант (план) расположения механизированного модульного гаража в подземном пространстве жилого комплекса, где поз.1п обозначены места открытой парковки автомобилей, поз.2п обозначены места расположения туннелей механизированного модульного гаража для бокового заезда автомобилей, поз.3п обозначены жилые дома, поз.4п обозначена дорога, поз.5п обозначен контур подземного расположения механизированного модульного гаража, поз.6п схематично обозначен «шахтный» заезд автомобилей в специальный модуль механизированного модульного гаража. Механизированный модульный гараж расположен в подземном пространстве дороги 4п жилого комплекса и вдоль нее и выполнен в виде отдельных модулей, для хранения автомобилей, жестко соединенных между собой в одну замкнутую цепь. Боковые въезды (выезды) 2п в механизированный модульный гараж располагаются вне дороги 4п и такое расположение не затрудняет автомобильное движение по дороге 4п. При использовании специального модуля 6п для «шахтного» заезда в механизированный модульный гараж, этот модуль 6п располагают на поворотах механизированного модульного гаража, т.е. заезд 6п также не будет мешать автомобильному движению на дороге.
Для заезда в механизированный модульный гараж, оборудованного боковым заездом (фиг.1), автомобиль 22, двигаясь по дороге 21, подъезжает к воротам (на фиг. не показано). Оператор (или с помощью специального брелка) открывает ворота и в автоматическом режиме штоки 40, гидроцилиндры 41 перемещаются в крайнее максимальное положение. «Г»-образный рычаг 39 с пластиной захвата поворачивается и, сопрягаясь с пазом «Б» грузовой платформы 14, «сливаются» с контуром поверхности грузовой платформы 14. Грузовая платформа 14 готова к принятию автомобиля 22. Через эти ворота, автомобиль 22 въезжает в специальной проем боковой панели 20 и далее заезжает своим ходом на грузовую платформу 14 до упора в ограничительный брус 16. Для безопасного въезда (выезда) автомобиля 22 на грузовую платформу 14 предусмотрены направляющие балки 15. После въезда автомобиля 22 на грузовую платформу 14, до упора в ограничительный брус 16, автомобиль 22 водителем останавливается, двигатель выключается и им ставится автомобиль на скорость или на стояночный тормоз, одновременно происходит фиксация автомобиля 22 на грузовой платформе 14 или ограничение возможного его перемещения на грузовой платформе 14 (в зависимости от длины автомобиля) в автоматическом режиме, вследствие срабатывания датчиков движения (не показано). Сигнал от указанных датчиков включает в работу гидронасос, и вследствие этого происходит перемещение штоков 40 гидроцилиндров 41 управляющих упоров 17. Эффективность фиксации достигнет своего максимума тогда, когда штоки 40 гидроцилиндров 41 переместятся из крайнего максимального положения штоков 40 гидроцилиндров 41, в крайнее минимальное положение, при этом каждый «Г»-образный рычаг 39 с пластиной захвата поворачивается и занимает положение, при котором свободный конец «Г»образного рычага 39 с пластиной захвата будет находиться на максимальной высоте (под углом, близким к 90 градусам), к поверхности грузовой платформы 14 (фиг.6) и тем самым будет блокировать колесо автомобиля 22 или ограничивать его возможное перемещение на грузовой платформе 14. Зафиксированный на грузовой платформе 14 автомобиль 22 закрывается в механизированном модульном гараже воротами, расположенными на специальной панели 20 (не показано) с помощью оператора (с помощью специального брелка). Для определения места нахождения автомобиля в механизированном модульном гараже, а также для его получения из механизированного модульного гаража, владельцем автомобиля фиксируется номер тележки модуля, на которой был оставлен на хранение автомобиль. Для нахождения необходимого автомобиля в механизированном модульном гараже используется пульт его управления. При наборе нужного номера тележки модуля, на пульте управления механизированного модульного гаража, формируется необходимый сигнал, который поступает в коммутатор. И далее в результате действия этого сигнала включается энергоснабжение модуля (или модулей) оборудованного боковым выездом автомобилей из механизированного модульного гаража, и на рельсы 7 подается электрический ток, который поступает на каждую катушку электромагнита 36, каждого стопорного механизма 32, при этом якорь 35, преодолев действия сжатой пружины 38, втягивается и посредством рычага 34 перемещает стопорные штыри 33 вертикально вниз и освобождает колеса 8 от действия стопорных штырей 33, препятствующих движению тележки модуля по рельсам 7. Через рельсы 7 электрический ток одновременно поступает также в токосъемники (не показано) и далее на электродвигатели 12 всех тележек модулей. В этот момент все уже разблокированные колеса 8 начинают вращаться и все тележки модулей начинают передвижение по рельсам 7 в нужную сторону, пока тележка модуля с нужным автомобилем не достигнет модуля оборудованного боковым выездом автомобилей из механизированного модульного гаража, то есть оборудованного специальной панелью 20 и воротами, и дорогой 21. При достижения тележки модуля, с нужным автомобилем, этого модуля и места, оборудованного для выезда из механизированного модульного гаража, срабатывает датчик определения места нахождения тележки (не показано) и рельсы 7 обесточиваются, электродвигатели 12 останавливаются, а каждый электромагнит 36 каждого стопорного механизма 32 обесточивается, якорь 35, под действием пружины 38, выдвигается и посредством рычага 34 выдвигаются и стопорные штыри 33, колеса 8 тележки модуля блокируются, тележка модуля останавливается в выбранном положении, необходимом для обеспечения безопасного съезда автомобиля 22 с грузовой платформы 14. Если под действием колес 8 стопорные штыри 33 не могут выдвинуться, соответствующий сигнал с датчика, осуществляющего контроль за положением стопорных штырей, включает энергоснабжение и тележка модуля начнет снова передвигаться до тех пор, пока не займет необходимое и заданное положение, указанное выше, и обеспечив тем самым безопасный съезд автомобиля 22 с грузовой платформы 14. Автомобиль освобождается от действия управляемых упоров 17, посредством действия оператора (или с помощью специального брелка) и получает возможность съехать с грузовой платформы 14 своим ходом и выехать из механизированного модульного гаража. При невозможности уехать автомобиля своим ходом, предусмотрена аварийная лебедка для извлечения автомобиля из модуля и туннеля механизированного модульного гаража (не показано).
Для упрощения парковки автомобиля на грузовой платформе 14, грузовая платформа 14 может быть выполнена относительно рамы 13 с наклоном в сторону заезда автомобиля (угол наклона определяется при конкретном проектировании и в зависимости от условий расположения конкретного механизированного модульного гаража). Вследствие такой установки грузовой платформы 14 с наклоном в сторону заезда автомобиля отпадает необходимость использования какой-либо механической фиксации автомобиля на этой грузовой платформе 14 с помощью, например, управляемых упоров 17, поскольку при заезде автомобиля 22 на грузовую платформу 14, он упирается в ограничительный брус 16, выключается двигатель и за счет собственного веса автомобиль будет зафиксирован на этой грузовой платформе 14. Естественно уменьшается время парковки автомобиля на этой платформе 14.
В механизированном модульном гараже, оборудованном специальным модулем, предусматривающим «шахтный» выезд или въезд автомобилей в данный гараж (при расположении автомобилей на грузовой платформе вдоль направления движения тележек модулей, а также при любом расположении автомобилей на грузовой платформе относительно направления движения тележек модулей), для установки автомобиля на хранение в этот гараж оператором, необходимо пультом управления механизированного модульного гаража (или брелком) вызывать необходимую (или свободную) тележку модуля, в результате этих действий формируется необходимый сигнал, который поступает в коммутатор. И далее, в результате действия этого сигнала, включается энергоснабжение модулей и на рельсы 7 подается электрический ток, который поступает на каждую катушку электромагнита 36, каждого стопорного механизма 32, при этом якорь 35, преодолев действия сжатой пружины 38, втягивается и посредством рычага 34 перемещает стопорные штыри 33 вертикально вниз и освобождает колеса 8 от действия стопорных штырей 33, препятствующих движению тележки модуля по рельсам 7. Через рельсы 7 электрический ток одновременно поступает также в токосъемники (не показано) и далее на электродвигатели 12 всех тележек модулей. В этот момент все уже разблокированные колеса 8 начинают вращаться и все тележки модулей начинают передвижение по рельсам 7 в нужную сторону, пока необходимая (или свободная) тележка модуля не достигнет специального модуля. При достижении этой тележки модуля специального модуля и места, оборудованного для подъема грузовой платформы 23 из механизированного модульного гаража, срабатывает датчик определения места нахождения тележки (не показано) и рельсы 7 обесточиваются, электродвигатели 12 останавливаются, а каждый электромагнит 36 каждого стопорного механизма 32 обесточивается, якорь 35, под действием пружины 38, выдвигается и посредством рычага 34 выдвигаются и стопорные штыри 33, колеса 8 тележки модуля блокируются, тележка модуля останавливается в выбранном положении, необходимом для обеспечения безопасного подъема грузовой платформой 23. Если под действием колес 8 стопорные штыри 33 не могут выдвинуться, то соответствующий сигнал с датчика, осуществляющего контроль за положением стопорных штырей, включает энергоснабжение, и тележка модуля начнет снова передвигаться до тех пор, пока не займет необходимое и заданное положение, указанное выше, и обеспечивая тем самым заданный и безопасный подъем грузовой платформы 23 (фиг.3). Далее, автоматически начинает работать гидронасос и штоки гидроцилиндров 27 начинают выдвигаться. Штоки гидроцилиндров 27 проходят отверстие «А» в раме 13 и сопрягаются со специальными выемками грузовой платформы 23. Далее грузовая платформа 23 начинает подниматься, и передние, и задние несущие стойки 24 и 25 начинают входить в контакт с соответствующими подпружиненными роликами 42. Изогнутые части передних и задних несущих стоек 24 и 25 проходят подпружиненные ролики 42 и своими вертикальными частями передних и задних несущих стоек 24 и 25 входят в контакт с подпружиненными роликами 42. Обвязка из дополнительных балок 28 входит в контакт с выемкой крыши 29, и крыша 29 начинает подниматься одновременно с грузовой платформой 23. Подпружиненные ролики 42, вошедшие в контакт с вертикальными частями указанных несущих стоек 24 и 25, обеспечивают надежность подъема грузовой платформы 23 и, исключая возможность ее раскачивания. При достижении необходимой максимальной высоты подъема, подъем прекращается, механически срабатывают подпружиненные защелки электромеханических замков 30 и грузовая платформа 23 тем самым механически фиксируется на этой высоте.
Грузовая платформа освобождается от действия управляемых упоров 17, посредством действия оператора (или с помощью специального брелка) и автомобиль получает возможность въехать на грузовую платформу 23 своим ходом. Далее автомобиль, въехавший на грузовую платформу 23, до упора в ограничительный брус 16, автоматически, при помощи управляющих упоров 17, фиксируется. Для опускания грузовой платформы 23, с автомобилем, сначала втягиваются подпружиненные защелки электромеханических замков 30, путем подачи электрического тока на их клеммы и грузовая платформа 23 готова к спуску с помощью гидроцилиндров 27. Штоки гидроцилиндров 27 начинают опускаться и грузовая платформа 23 начинает спуск. Крыша 29 опускается на свое место, в свое исходное положение, полностью закрыв проем специального модуля и выйдя при этом из своего контакта с обвязкой дополнительных балок 28. По мере опускания грузовой платформы 23 выходят из контакта подпружиненные ролики 42 с вертикальными частями несущих стоек 24 и 25. Затем грузовая платформа 29 с автомобилем, используя свои посадочные бортики, точно опускается на раму 13 и фиксируется на ней, а гидроцилиндры 27 принимают свое исходное положение. Извлечение автомобиля происходит обратным порядком, описанным выше. Для упрощения выезда автомобиля с грузовой платформы 23, при «шахтном» способе выезда из механизированного модульного гаража, предусмотрена замена ограничительного бруса 16 на управляющие упоры 17. Автомобиль получает возможность уезжать с грузовой платформы 23 передним ходом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ХРАНЕНИЯ АВТОМОБИЛЕЙ В ОТДЕЛЬНЫХ ВЗАИМОСВЯЗАННЫХ МОДУЛЯХ | 2011 |
|
RU2506386C2 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2016 |
|
RU2620110C1 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2014 |
|
RU2574081C1 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2013 |
|
RU2526938C1 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2019 |
|
RU2712891C1 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2012 |
|
RU2513453C1 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2018 |
|
RU2692516C1 |
| МЕХАНИЗИРОВАННЫЙ МОДУЛЬНЫЙ ГАРАЖ | 2014 |
|
RU2574082C1 |
| СПОСОБ ХРАНЕНИЯ АВТОМОБИЛЕЙ ДЛЯ МЕХАНИЗИРОВАННОГО МОДУЛЬНОГО ГАРАЖА | 2013 |
|
RU2545192C1 |
| МЕХАНИЗИРОВАННАЯ АВТОМОБИЛЬНАЯ ПАРКОВКА | 2012 |
|
RU2490409C1 |




Изобретение относится к области строительства, а именно к конструкциям механизированных гаражей или стоянок. Механизированный модульный гараж выполнен в виде отдельных взаимосвязанных модулей для хранения автомобилей, каждый из которых содержит основание, две боковые панели, крышу, тележку с рамой, привод тележки и грузовую платформу, установленную на раме, причем основание снабжено рельсами, а тележка выполнена с возможностью перемещения по рельсам, при этом каждая из боковых панелей своей одной стороной жестко связана с одной из сторон основания, а другой, противолежащей стороной, с крышей. Модули жестко соединены между собой свободными и соответствующими сторонами оснований, боковых панелей и крыш, образуя последовательное соединение этих модулей, при котором последний модуль присоединен к первому модулю, причем каждый модуль снабжен передними и задними вертикальными стойками, вертикально установленными по углам основания и каждая из которых сопряжена с боковой панелью, а торцами своих концов жестко взаимосвязана с основанием и крышей, при этом рельсы жестко установлены на основании в два ряда, с возможностью передачи электроэнергии и параллельны между собой, они также сопряжены с рельсами смежных модулей, образуя замкнутый рельсовый путь, причем привод каждой тележки установлен на самой тележке, а каждая грузовая платформа снабжена направляющими балками и механизмом фиксации, установленными на этой грузовой платформе предназначенной для хранения автомобиля, располагаемого на ней поперек направления движения тележек модулей, при этом боковая панель одного из модулей механизированного модульного гаража выполнена со специальным проемом для обеспечения въезда или выезда автомобилей из механизированного модульного гаража, а рельсы этого модуля снабжены стопорным механизмом. Технический результат: увеличение надежности и упрощение конструкции механизированного модульного гаража, уменьшение стоимости и сокращения срока строительства гаража. 6 з.п. ф-лы, 7 ил.
1. Механизированный модульный гараж, выполненный в виде отдельных взаимосвязанных модулей для хранения автомобилей, каждый из которых содержит основание, две боковые панели, крышу, тележку с рамой, привод тележки и грузовую платформу, установленную на раме, причем основание снабжено рельсами, а тележка выполнена с возможностью перемещения по рельсам, при этом каждая из боковых панелей, своей одной стороной, жестко связана с одной из сторон основания, а другой, противолежащей стороной, - с крышей, отличающийся тем, что модули жестко соединены между собой свободными и соответствующими сторонами оснований, боковых панелей и крыш, образуя последовательное соединение этих модулей, при котором последний модуль присоединен к первому модулю, причем каждый модуль снабжен передними и задними вертикальными стойками, вертикально установленными по углам основания и каждая из которых сопряжена с боковой панелью, а торцами своих концов жестко взаимосвязана с основанием и крышей, при этом рельсы жестко установлены на основании в два ряда, с возможностью передачи электроэнергии и параллельны между собой, они также сопряжены с рельсами смежных модулей, образуя замкнутый рельсовый путь, причем привод каждой тележки установлен на самой тележке, а каждая грузовая платформа снабжена направляющими балками и механизмом фиксации, установленными на этой грузовой платформе предназначенной для хранения автомобиля, располагаемого на ней поперек направления движения тележек модулей, при этом боковая панель одного из модулей механизированного модульного гаража выполнена со специальным проемом для обеспечения въезда или выезда автомобилей из механизированного модульного гаража, а рельсы этого модуля снабжены стопорным механизмом.
2. Механизированный модульный гараж по п.1, отличающийся тем, что он снабжен специальным модулем, содержащим основание с прямоугольным вырезом и специальным поддоном, выполненным в виде прямоугольной ванны, а также подпружиненные ролики, крышу с прямоугольной выемкой, грузовую платформу с посадочными бортиками и специальными выемками, передние и задние несущие стойки с дополнительными балками, электромеханические замки с подпружиненными защелками, при этом крыша и грузовая платформа выполнены с возможностью вертикального перемещения и снабжены дополнительным приводом вертикального перемещения, причем прямоугольный вырез основания, по его краям, выполнен сопряженным с краями верхней части прямоугольной ванны специального поддона, в котором смонтирован дополнительный привод вертикального перемещения, выполненный в виде гидроцилиндров, а рама тележки этого модуля и всех других модулей выполнена со сквозными отверстиями, при этом штоки этих гидроцилиндров выполнены сопрягаемыми со сквозными отверстиями всех рам тележек модулей, а также выполнены с возможностью сопряжения со специальными выемками каждой грузовой платформы, при ее подъеме, причем передние и задние несущие стойки установлены вертикально и жестко закреплены по углам каждой грузовой платформы, при этом каждый свободный конец этих стоек выполнен с изгибом, причем каждый конец передних несущих стоек наклонен в сторону задних несущих стоек, а каждый конец задних несущих стоек наклонен в сторону передних несущих стоек, и все эти концы жестко соединены между собой дополнительными балками, образующими обвязку концов этих передних и задних несущих стоек, выполненную сопрягаемой с прямоугольной выемкой крыши, при подъеме грузовой платформы, при этом на концах передних и задних вертикальных стоек установлены подпружиненные ролики, каждый из которых выполнен сопрягаемым с соответствующей вертикальной частью, передней или задней, несущей стойкой, причем установленные на этих вертикальных стойках электромеханические замки своими подпружиненными защелками выполнены сопрягаемыми с грузовой платформой.
3. Механизированный модульный гараж по п.1, отличающийся тем, что стопорный механизм содержит подпружиненные стопорные штыри, рычаг и якорь с электромагнитом, а рельсы модуля выполнены со сквозными вертикальными отверстиями, при этом электромагнит установлен на этих рельсах, а стопорные штыри выполнены сопрягаемыми с упомянутыми сквозными вертикальными отверстиями и с возможностью вертикального перемещения, а конец каждого стопорного штыря, посредством рычага, взаимосвязан с якорем электромагнита, причем другой конец каждого стопорного штыря выполнен с возможностью контакта с колесами тележки модуля.
4. Механизированный модульный гараж по п.1, отличающийся тем, что механизм фиксации автомобилей на грузовой платформе каждого модуля содержит ограничительный брус и управляемые упоры, причем каждый управляемый упор снабжен «Г»-образным рычагом с пластиной захвата и гидроцилиндром, а грузовая платформа выполнена с пазами, сопрягаемыми с каждым «Г»-образным рычагом, установленным на оси, в одном из этих пазов и с возможностью поворота в вертикальной плоскости, при этом один из его концов шарнирно взаимосвязан со штоком гидроцилиндра, установленного на грузовой платформе, а другой конец этого рычага жестко соединен с пластиной захвата и выполнен с возможностью контакта с колесом автомобиля.
5. Механизированный модульный гараж по п.1 или 2, отличающийся тем, что грузовая платформа установлена с наклоном в сторону заезда автомобиля.
6. Механизированный модульный гараж по п.1, отличающийся тем, что крыша модуля выполнена съемной.
7. Механизированный модульный гараж по п.1, отличающийся тем, что каждая тележка модуля содержит экран, который жестко установлен по краю грузовой платформы и расположен поперек направления движения тележек модуля, при этом экран выполнен сопрягаемым с проемом модулей и обеспечивает свободное перемещения тележек модулей.
| АВТОМАТИЗИРОВАННЫЙ МНОГОЭТАЖНЫЙ ГАРАЖ-СКЛАД | 2006 |
|
RU2360086C2 |
| МНОГОУРОВНЕВАЯ СТОЯНКА | 2007 |
|
RU2352740C2 |
| Способ перемещения спутников-тележек и поддонов с автомобилем в модульном паркинге ЛИШ | 2002 |
|
RU2225488C1 |
| Многоканальное устройство тестового контроля логических узлов | 1982 |
|
SU1049839A1 |

