Изобретение относится к лазерной технике, в частности к гироскопии, и может быть использовано для прецизионного измерения угловых перемещений лазерного гироскопа.
Известен способ измерения угловых перемещений (патент RU 2127867) лазерного гироскопа со знакопеременной подставкой, основанный на выделении знаковой функции и двух последовательностей счетных импульсов из двух аналоговых квадратурных сигналов, отражающих перемещения интерференционной картины, сформированной выведенными из кольцевого лазера встречными волнами. Недостаток данного способа заключается в повышенном шуме квантования выходного сигнала, поскольку регистрируются лишь изменения разности фаз встречных волн на величину π/n радиан (n - натуральное число), что при малых n недостаточно для эффективного удаления колебаний на частоте подставки из выходного сигнала без использования в конструкции гироскопа дополнительных элементов. Применение данного способа в реальном времени при больших n ограничено возрастающей сложностью выполняемых операций, которая приводит к увеличению дополнительной погрешности в условиях вращения с изменяющейся угловой скоростью.
Известен способ измерения угловых перемещений (патент RU 2307325) лазерного гироскопа со знакопеременной подставкой, позволяющий без использования дополнительных элементов существенно уменьшить ошибку, вызываемую механическими колебаниями гироскопа относительно неподвижного основания, основанный на обработке последовательности отсчетов выходного сигнала при помощи цифрового фильтра с конечной импульсной характеристикой. Недостаток данного способа заключается в противоречии между необходимостью подавления шума квантования и появлением дополнительной погрешности в условиях вращения гироскопа с угловым ускорением.
Наиболее близким к заявленному изобретению способом того же назначения является способ прецизионного восстановления перемещений интерференционной картины в реальном времени (патент US 7224463), включающий следующие операции: дискретизация аналоговых квадратурных сигналов; аппроксимация эллипсом множества точек на плоскости переменных, соответствующих первичным сигналам; восстановление временного ряда для разности фаз интерферирующих волн.
Однако применение данного способа в случае обработки первичных сигналов лазерного гироскопа не позволяет подавить в выходном сигнале колебания на частоте знакопеременной подставки.
Задача, на достижение которой направлено заявленное изобретение, заключается в прецизионной регистрации в реальном времени угловых перемещений в условиях вращения лазерного гироскопа с изменяющейся угловой скоростью, включающего кольцевой лазер, блок электроники и систему формирования знакопеременной частотной подставки, путем подавления шума квантования в выходном сигнале и уменьшения влияния модуляции частот встречных волн в кольцевом лазере на точность измерения угловых перемещений.
Техническим результатом является уменьшение погрешности при измерениях в реальном времени угловых перемещений с помощью лазерного гироскопа, который вращается с угловым ускорением, за счет подавления в его выходном сигнале шума квантования и колебаний на частоте знакопеременной подставки без использования иных источников информации, кроме квадратурных сигналов.
Заявленный технический результат достигается способом прецизионной обработки сигналов лазерного гироскопа со знакопеременной частотной подставкой, при котором оцифровывают первичные квадратурные сигналы, отражающие перемещения интерференционной картины, образованные выведенными из кольцевого лазера встречными лазерными пучками, осуществляют аппроксимацию эллипсом множества точек на плоскости переменных, соответствующих отсчетам первичных сигналов, и восстановление временного ряда для изменений разности фаз интерферирующих волн (угловых перемещений кольцевого лазера) за равные интервалы времени, частота дискретизации первичных сигналов определяется верхним пределом диапазона измеряемых угловых скоростей; частота обновления отсчетов угловых перемещений кольцевого лазера выбирается вблизи верхнего предела, обеспечивающего гарантированное определение параметров первичных квадратурных сигналов; полученный временной ряд угловых перемещений кольцевого лазера преобразуется с помощью цифрового режекторного узкополосного фильтра с бесконечной импульсной характеристикой, центр полосы подавления которого соответствует частоте знакопеременной подставки.
Сущность заявляемого способа поясняется следующими чертежами:
фиг. 1 - аппроксимация эллипсом отсчетов первичных сигналов лазерного гироскопа, характеризующих перемещения интерференционной картины;
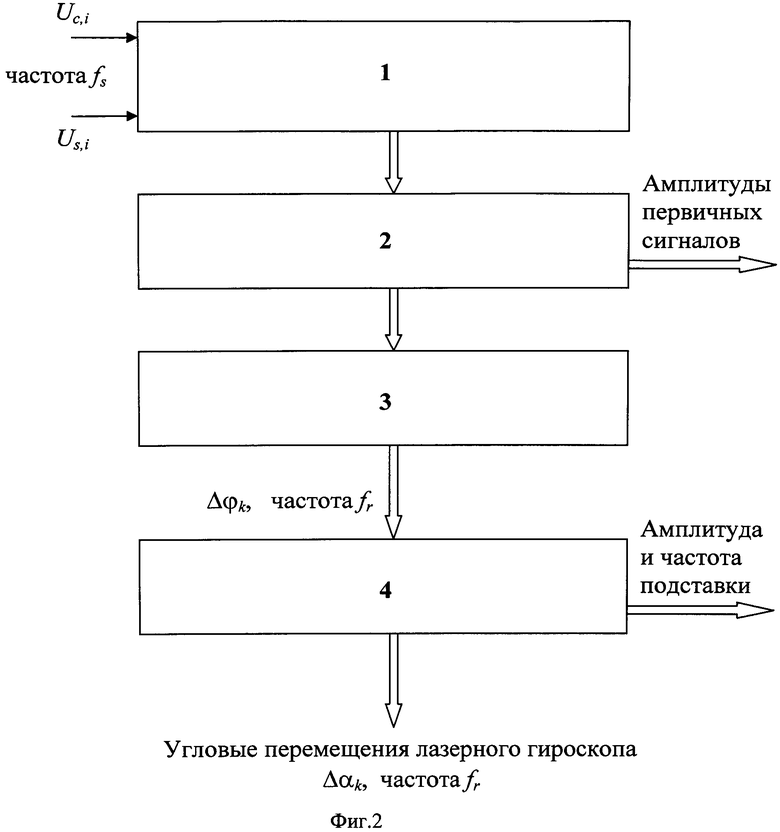
фиг. 2 - преобразование отсчетов первичных сигналов в отсчеты угловых перемещений лазерного гироскопа с вибрационной частотной подставкой;
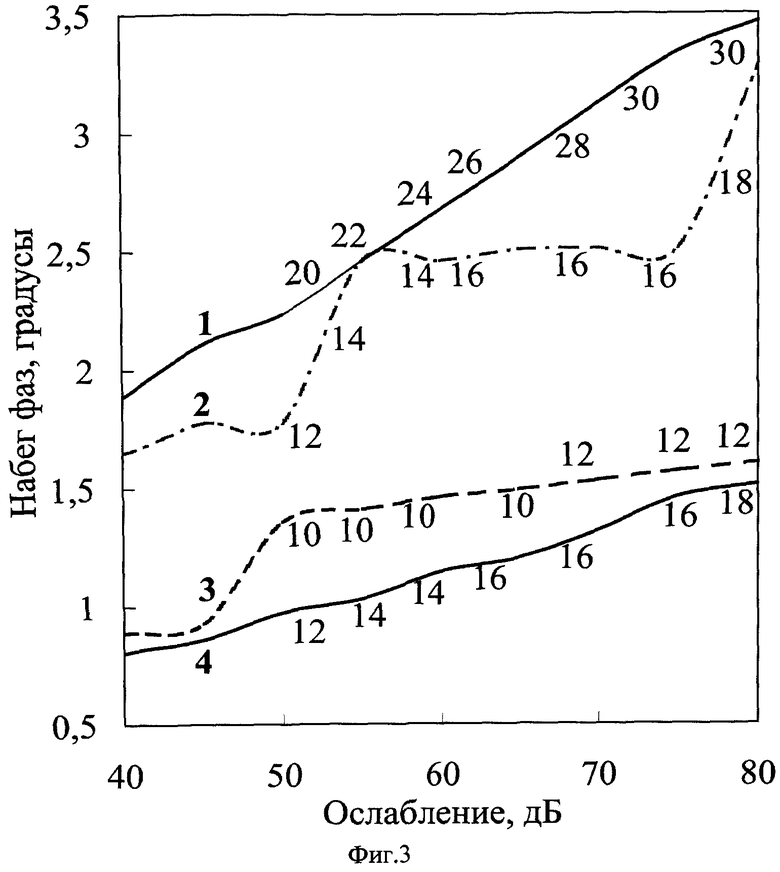
фиг. 3 - фазовые задержки гармонического сигнала на выходе режекторных фильтров с бесконечной импульсной характеристикой;
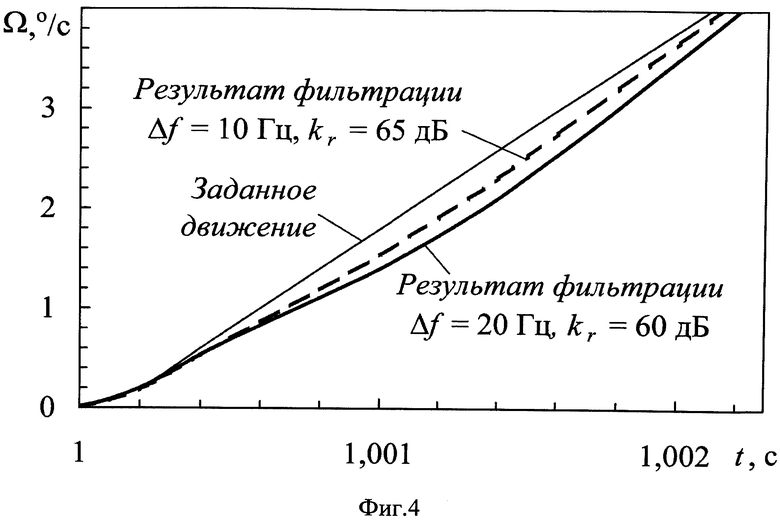
фиг. 4 - запаздывание выходного сигнала при равноускоренном вращении лазерного гироскопа;
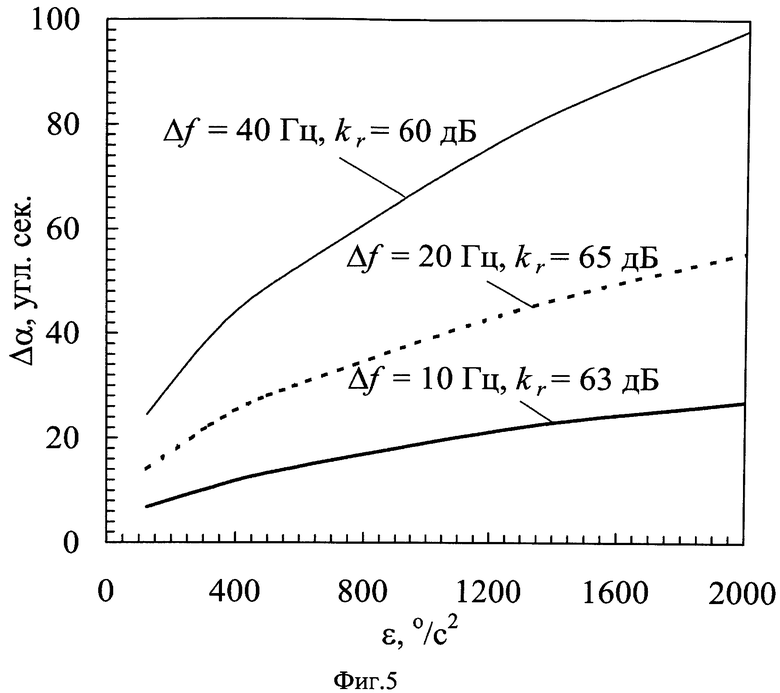
фиг. 5 - зависимость систематической погрешности при измерении поворота на фиксированный угол от углового ускорения и ширины полосы подавления режекторного фильтра;
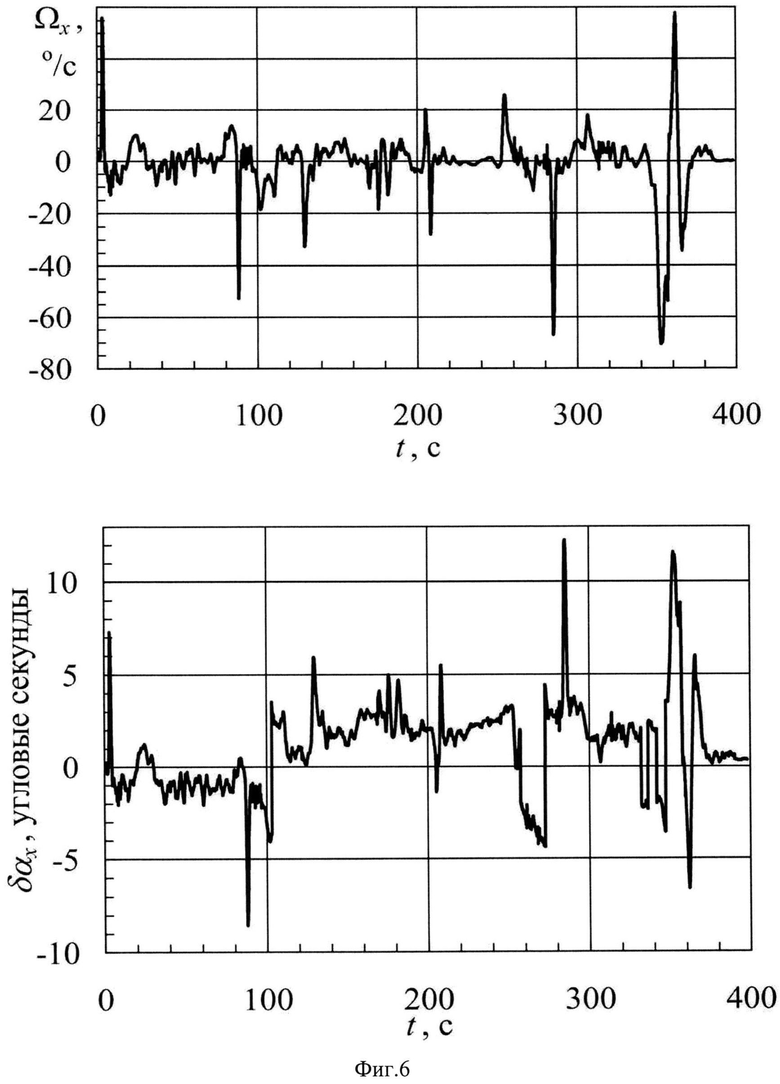
фиг. 6 - заданное вращение и погрешность определения углового положения объекта.
Осуществление изобретения показано на примере, который наиболее полным образом иллюстрирует использование изобретения, однако при этом не является единственным.
На фиг. 1 проиллюстрирована аппроксимация эллипсом первичных квадратурных сигналов лазерного гироскопа Uc(t), Us(t):

где ψ(t) - разность фаз встречных волн, изменения которой отражают вращение, η - дополнительный фазовый сдвиг, обусловленный несовершенством электрооптической системы, Uc,0, Us,0 - постоянные смещения, Uc,m, Us,m - амплитуды сигналов.
Первичные сигналы после предварительного усиления синхронно преобразуются в цифровую форму с частотой дискретизации fs, определяемой верхним пределом диапазона измеряемых угловых скоростей. Временной ряд значений ψi определяется по зарегистрированным последовательностям отсчетов Uc,i, Us,i:

Переход от отсчетов первичных квадратурных сигналов с частотой fs к отсчетам угловых перемещений лазерного гироскопа Δαk с частотой fr отражает фиг. 2. Чтобы определить параметры сигналов (1), отсчеты накапливаются в течение интервала времени T, достаточного для гарантированного определения пяти параметров сигналов (1):

где K - масштабный коэффициент лазерного гироскопа, ωD - амплитуда колебаний угловой скорости кольцевого лазера относительно корпуса лазерного гироскопа на частоте подставки, fd - частота знакопеременной подставки, fr - частота обновления отсчетов углового перемещения (угловой скорости) на выходе лазерного гироскопа. После этого вычисляются коэффициенты c1÷c5, описывающие эллипс, являющийся наилучшей аппроксимацией отсчетов на плоскости переменных Uc, Us, (блок 2):



Значения коэффициентов c1÷c5 определяются в результате решения системы алгебраических уравнений:

в которой Ajk, Bj выражаются через комбинации сумм и произведений отсчетов первичных сигналов Uc,i, Us,i:
Медленные изменения параметров квадратурных сигналов (1), вызванные несовершенством информационного тракта и случайной модуляцией амплитуды и фазы подставки, что необходимо для подавления явления динамического захвата, делают целесообразным выбор времени накопления отсчетов Т вблизи нижнего предела (3). Процедура определения параметров первичных квадратурных сигналов повторяется с частотой fr. После этого с такой же частотой обновления формируется последовательность отсчетов угловых перемещений кольцевого лазера Δφk (блок 3):

Удаление колебаний на частоте знакопеременной подставки (блок 4) с малой задержкой преобразованного сигнала осуществлено с помощью фильтра с бесконечной импульсной характеристикой (БИХ фильтра). Входные данные представляют собой временную последовательность угловых перемещений кольцевого лазера (8), а выходные - последовательность угловых перемещений лазерного гироскопа Δαk:

где N - порядок фильтра.
Коэффициенты преобразования (9) bn, hn зависят от коэффициента подавления kr, ширины полосы подавления Δf и ширины переходной области частот режекторного БИХ фильтра. Фиг. 3 отражает зависимость фазовой задержки колебаний составляющей сигнала на частоте 100 Гц от коэффициента подавления для различных типов БИХ-фильтров с полосой подавления 397,5-402,5 Гц: 1 - фильтр Баттерворта, 2 - фильтр Чебышева I рода, 3 - эллиптический фильтр, 4 - фильтр Чебышева II рода. Около кривых указаны порядки фильтров.
Фиг. 4 отражает искажения переднего фронта, вызванные фильтрацией колебаний на частоте вибрационной подставки (400 Гц) для разных параметров эллиптического режекторного фильтра десятого порядка (N=10): полосы Δf и коэффициента подавления kr. Результаты получены для гироскопа на основе кольцевого гелий-неонового лазера с длиной волны λ=632,8 нм, оптический резонатор которого образован четырьмя зеркалами, расположенными в вершинах квадрата (периметр 28 см). На фиг. 5 приведены зависимости от величины углового ускорения ε погрешности δα, возникающей в результате фильтрации, при определении углового перемещения при равноускоренном повороте на угол 10°; полоса и коэффициент подавления фильтра указаны около кривых.
Фиг. 6 отражает результаты моделирования процесса выделения информационного сигнала при цифровой обработке и режекторной фильтрации первичных данных лазерного гироскопа, использованного в канале крена для участка полета продолжительностью 400 секунд. Для удаления подставки использован эллиптический фильтр десятого порядка с ослаблением 60 дБ в полосе частот 5 Гц. Траекторные движения состоят из комбинаций быстрых маневров, в которых угловые ускорения достигают 1000°/с2, чему соответствуют кратковременные всплески погрешности восстановленного угла δα до 10-12 угловых секунд. Погрешность восстановленного угла колеблется около нулевого среднего и не накапливается.
Таким образом, по сравнению с известным способами прецизионной обработки сигналов лазерного гироскопа, заявленный способ обладает следующими преимуществами:
- подавление колебаний на частоте знакопеременной подставки в выходном сигнале, совместимое с возможностью регистрировать в реальном времени вращение с угловыми ускорениями до 1000°/с2;
- повышение на два порядка чувствительности к угловым перемещениям;
- увеличение частоты обновления выходной информации;
- потенциальная возможность реализации систем автоматической адаптации лазерного гироскопа к изменяющимся условиям функционирования без использования вспомогательных датчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ГИРОСКОП С КОМПЕНСАЦИЕЙ СОСТАВЛЯЮЩЕЙ, ВНОСИМОЙ ВИБРОПОДСТАВКОЙ | 2015 |
|
RU2613043C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С ЦИФРОВЫМ СРЕДСТВОМ УПРАВЛЕНИЯ | 2019 |
|
RU2731656C1 |
| Способ измерения угловой скорости лазерного гироскопа со знакопеременной частотной подставкой | 2017 |
|
RU2651612C1 |
| Система регулировки периметра зеемановского лазерного гироскопа | 2020 |
|
RU2736737C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МНОГОМОДОВЫЙ ВОЛОКОННЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2020 |
|
RU2751052C1 |
| Двухрежимный зеемановский лазерный гироскоп | 2020 |
|
RU2740167C1 |
| Способ измерения порога статического захвата в лазерном датчике угловой скорости | 2020 |
|
RU2762951C1 |
| Способ стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра | 2023 |
|
RU2805770C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2022 |
|
RU2796228C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ СО ЗНАКОПЕРЕМЕННОЙ ЧАСТОТНОЙ ПОДСТАВКОЙ | 2013 |
|
RU2531027C1 |
Изобретение относится к лазерной технике, в частности к гироскопии, и может быть использовано для прецизионного измерения угловых перемещений лазерного гироскопа. Способ прецизионной обработки сигналов лазерного гироскопа со знакопеременной частотной подставкой, при котором оцифровывают первичные квадратурные сигналы, отражающие перемещения интерференционной картины, образованные выведенными из кольцевого лазера встречными лазерными пучками, осуществляют аппроксимацию эллипсом множества точек на плоскости переменных, соответствующих отсчетам первичных сигналов, и восстановление временного ряда для изменений разности фаз интерферирующих волн (угловых перемещений кольцевого лазера) за равные интервалы времени, при этом частота дискретизации первичных сигналов определяется верхним пределом диапазона измеряемых угловых скоростей; частота обновления отсчетов угловых перемещений кольцевого лазера выбирается вблизи верхнего предела, обеспечивающего гарантированное определение параметров первичных квадратурных сигналов; полученный временной ряд угловых перемещений кольцевого лазера преобразуется в угловые перемещения лазерного гироскопа с помощью цифрового режекторного узкополосного фильтра с бесконечной импульсной характеристикой, центр полосы подавления которого соответствует частоте знакопеременной подставки. Технический результат - уменьшение погрешности при измерениях в реальном времени угловых перемещений. 6 ил.
Способ прецизионной обработки сигналов лазерного гироскопа со знакопеременной частотной подставкой, при котором оцифровывают первичные квадратурные сигналы, отражающие перемещения интерференционной картины, образованные выведенными из кольцевого лазера встречными лазерными пучками, осуществляют аппроксимацию эллипсом множества точек на плоскости переменных, соответствующих отсчетам первичных сигналов, и восстановление временного ряда для изменений разности фаз интерферирующих волн (угловых перемещений кольцевого лазера) за равные интервалы времени, отличающийся тем, что частота дискретизации первичных сигналов определяется верхним пределом диапазона измеряемых угловых скоростей; частота обновления отсчетов угловых перемещений кольцевого лазера выбирается вблизи верхнего предела, обеспечивающего гарантированное определение параметров первичных квадратурных сигналов; полученный временной ряд угловых перемещений кольцевого лазера преобразуется в угловые перемещения лазерного гироскопа с помощью цифрового режекторного узкополосного фильтра с бесконечной импульсной характеристикой, центр полосы подавления которого соответствует частоте знакопеременной подставки.
| US 7224463 B1, 29.05.2007 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ УГЛОВОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 1996 |
|
RU2112926C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ | 2009 |
|
RU2408844C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИНТЕЗ-ГАЗА ИЗ ДРЕВЕСНЫХ ОТХОДОВ | 2012 |
|
RU2507238C2 |

