Изобретение относится к измерительной лазерной технике, а именно к лазерной гироскопии, и может быть использовано при создании систем формирования и обработки выходной информации лазерных гироскопов со знакопеременной частотной подставкой.
Лазерные гироскопы со знакопеременной частотной подставкой применяются в современных системах навигации, ориентации, наведения и стабилизации пространственного положения самолетов, ракет, космических аппаратов и других движущихся объектов.
Известны разные способы измерения угловой скорости в лазерных гироскопах со знакопеременной частотной подставкой [Великобритания, патент GB №2107511, H01S 3/083, Россия, патент RU №2307325, G01C 19/66].
Существенным недостатком известных способов измерения угловой скорости лазерных гироскопов со знакопеременной частотной подставкой является наличие в выходной характеристике зон нечувствительности, обусловленных связью встречных волн через обратное рассеяние [Ароновитц Ф. Лазерные гироскопы. В сб. статей «Применения лазеров» под ред. Тычинского В.П., М.: Мир, 1974, с. 182]. Известным способом устранения динамических зон нечувствительности является ошумление сигнала частотной подставки [Aronowitz F., Fundamentals of the ring laser gyro. Research and Technology Organisation., Optical Gyros and their Application., May, 1999, (3-1)-(3-46)]. Недостатком этого способа является увеличение погрешности измерения угловой скорости при малых временах измерения вследствие увеличения случайной составляющей выходного сигнала из-за его ошумления.
Наиболее близким по технической сущности к предлагаемому способу измерения угловой скорости лазерных гироскопов со знакопеременной частотной подставкой является способ, описанный в статье [Azarova V.V. etal. Zeeman Laser Gyroscops, Research and Technology Organisation., Optical Gyros and their Application., May, 1999, (5-1)-(5-29)], позволяющий уменьшить величину зон нечувствительности за счет использования прямоугольной частотной подставки, заключающийся в формировании на основе выходного сигнала вращения лазерного гироскопа со знакопеременной прямоугольной подставкой последовательности импульсов, следующих друг за другом через интервалы времени, равные периоду выходного сигнала, определении знака разности частот встречных волн на полупериодах переключения частотной подставки и времени начала каждого полупериода, подсчете числа импульсов выходного сигнала вращения лазерного гироскопа на каждом полупериоде переключения частотной подставки, при этом угловую скорость определяют по формуле:

где Ω - угловая скорость;
N+ и N- - числа, равные числу импульсов, подсчитанных в положительном и отрицательном полупериодах частотной подставки соответственно, со знаком разности частот;
K - масштабный коэффициент лазерного гироскопа;
Т - период переключения частотной подставки.
Данный способ позволяет уменьшить динамические зоны синхронизации без ошумления частотной подставки. Недостатком данного способа является то, что он позволяет только уменьшить величину динамических зон за счет использования более оптимальной формы частотной подставки (прямоугольной), но не устраняет их полностью.
Задачей изобретения является устранение динамических зон захвата в лазерном гироскопе со знакопеременной частотной подставкой и уменьшение ошибки измерения угловой скорости вращения.
Поставленная задача решается за счет того, что в известном способе измерения угловой скорости лазерного гироскопа со знакопеременной частотной подставкой, включающем формирование на основе выходного сигнала вращения лазерного гироскопа последовательности импульсов, следующих друг за другом через интервалы времени, равные периоду выходного сигнала, подсчет числа импульсов выходного сигнала вращения лазерного гироскопа на каждом полупериоде переключения частотной подставки, определение знака разности частот встречных волн и определение времени начала каждого полупериода переключения частотной подставки, измеряют интервалы времени между первым и последним импульсом на каждом полупериоде переключения частотной подставки, а также подсчитывают числа импульсов за эти интервалы времени и определяют угловую скорость по формуле:

где Ω - угловая скорость;
t+ - интервал времени между первым и последним импульсами на полу периоде с положительным знаком частотной подставки;
t- - интервал времени между первым и последним импульсами на полупериоде с отрицательным знаком частотной подставки;
N+ - число, равное числу импульсов, подсчитанному на интервале времени t+ со знаком разности частот встречных волн;
N- - число, равное числу импульсов, подсчитанному на интервале времени t- со знаком разности частот встречных волн;
K - масштабный коэффициент лазерного гироскопа.
Другим отличием является то, что измерение проводят за несколько периодов переключения частотной подставки, а за измеренное значение угловой скорости принимают среднее арифметическое из полученных за каждый период значений угловой скорости;
Поскольку вклад в фазу выходного сигнала от обратного рассеяния имеет период выходного сигнала, при подсчете импульсов за каждый из интервалов времени t+ и t- он вычитается и динамические зоны синхронизации в выходной характеристике отсутствуют. Фактически в данном случае при измерении угловой скорости исключаются интервалы времени, на которых происходит набег фаз, приводящий к динамическому захвату частот встречных волн и к ошибке измерения угловой скорости. Этот набег фаз происходит вблизи точки смены знака разности частот встречных волн за время не более одного периода выходного сигнала [Волновые и флуктуационные процессы в лазерах. Под ред. Климонтовича Ю.Л., М.: Наука, 1974].
Повышение точности при измерении средней угловой скорости за несколько периодов переключения частотной подставки обеспечивают за счет снижения случайных ошибок определения средней угловой скорости на одном периоде.
Действительно, погрешность подсчета числа импульсов определяется надежностью счетной логики и является случайной величиной. Погрешности измерения интервалов времени t+ и t- определяются отношением сигнал/шум выходного сигнала и шумовой составляющей фазы выходного сигнала, поэтому также являются случайными. В результате среднее арифметическое значение угловой скорости за n периодов переключения частотной подставки будет иметь относительную ошибку, в  раз меньшую, чем за один период.
раз меньшую, чем за один период.
Рассмотрим применение предложенного способа для лазерного гироскопа ЗЛГ-16, параметры которого для обычного способа измерения угловой скорости представлены в работах [Азарова В.В. и др. Зеемановские лазерные гироскопы. Квантовая электроника, т. 45, №2, с. 171-179, 2015, Синельников А.О. Влияние температуры внешней среды и саморазогрева на выходные характеристики кольцевых зеемановских лазеров определяющих точность лазерных гироскопов на их основе. Диссертация на соискание ученой степени к.т.н., М., 2014].
В этом гироскопе используется знакопеременная частотная подставка FB(t), имеющая форму меандра

здесь F, Т - амплитуда и период переключения подставки.
Период переключения подставки состоит из двух полупериодов, в одном из которых частотная подставка положительна (положительный полупериод), а в другом - отрицательна (отрицательный полупериод).
На фигуре схематично изображена зависимость напряжения выходного сигнала U(t) в относительных единицах лазерного гироскопа ЗЛК-16 со знакопеременной частотной подставкой от времени t в мс для положительного полупериода частотной подставки. Регистрируемые импульсы формируются на основе сигнала биений через интервалы времени, равные периоду выходного сигнала. На фигуре отмечены точки, в которых формируются счетные импульсы, и показаны их номера и измеряемый интервал времени t+. Аналогично формируют счетные импульсы в отрицательный полупериод. Знак разности частот определяют, сравнивая опережение сигналов, полученных с двух фотоприемников, сдвинутых пространственно на четверть интерференционной полосы. Начало каждого полупериода определяют по смене знака частотной подставки.
По предложенному способу измерялся интервал времени t+ между началом первого и началом последнего считываемого импульса в положительном полупериоде переключения частотной подставки, кратный периоду выходного сигнала. Аналогично определялся и измерялся интервал времени t-. Затем подсчитывались числа импульсов N+ и N- с учетом знака.
Угловая скорость на периоде переключения частотной подставки определялась по формуле:

где Ω - угловая скорость;
t+ - интервал времени между первым и последним импульсами на полупериоде с положительным знаком частотной подставки;
t- - интервал времени между первым и последним импульсами на полупериоде с отрицательным знаком частотной подставки;
N+ - число, равное числу импульсов, подсчитанному на интервале времени t+, со знаком разности частот встречных волн;
N- - число, равное числу импульсов, подсчитанному на интервале времени t-, со знаком разности частот встречных волн;
K - масштабный коэффициент лазерного гироскопа, равный 3,3'' для ЗЛГ-16.
Затем находилось среднее арифметическое значение угловой скорости за 0,001 с (1 период), за 1 с ( 1000 периодов) и за 1 мин (60000 периодов).
Полуширина динамической зоны для этого датчика составляет величину около 10 Гц (33'/мин), т.е. без ошумления датчик не чувствует даже угловую скорость Земли (15'/мин). При наличии ошумления случайная ошибка ЗЛГ-16 (нестабильность смещения нуля) составляет за период (0,001 с) - 25'/с, за секунду - до 0,04'/с и. за минуту до 0,3'/мин,
При измерении угловой скорости предложенным способом случайная ошибка ΔΩ составила за период - 0,15'/с, за 1 с - 0,01'/с, за минуту - 0,1'/мин.
Сравнение результатов показывает, что при времени меньше минуты точность измерения предложенным способом существенно выше. При большем времени измерения погрешности известного и предложенного способов сравниваются.
Таким образом, использование предлагаемого способа измерения угловой скорости лазерного гироскопа со знакопеременнной частотной подставкой обеспечивает по сравнению с существующими способами следующие преимущества: устранение динамических зон захвата в выходной характеристике лазерного гироскопа и повышение точности измерения угловой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ десинхронизации динамических зон на частотной характеристике лазерного гироскопа | 2020 |
|
RU2724306C1 |
| Способ стабилизации и регулирования периметра четырехчастотного зеемановского лазерного гироскопа со знакопеременной магнитооптической частотной подставкой в форме меандра | 2023 |
|
RU2805770C1 |
| Способ компенсации влияния медленного меандра на показания лазерного гироскопа | 2018 |
|
RU2685795C1 |
| СПОСОБ ПРЕЦИЗИОННОЙ ОБРАБОТКИ СИГНАЛОВ ЛАЗЕРНОГО ГИРОСКОПА | 2014 |
|
RU2571437C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ЛАЗЕРНОГО ГИРОСКОПА И СИСТЕМ НА ЕГО ОСНОВЕ | 2006 |
|
RU2307325C1 |
| Четырехчастотный лазерный гироскоп зеемановского типа | 2019 |
|
RU2731171C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МНОГОМОДОВЫЙ ВОЛОКОННЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2020 |
|
RU2751052C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ СО ЗНАКОПЕРЕМЕННОЙ ЧАСТОТНОЙ ПОДСТАВКОЙ | 2013 |
|
RU2531027C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| Двухрежимный зеемановский лазерный гироскоп | 2020 |
|
RU2740167C1 |

Изобретение относится к измерительной лазерной технике и может найти применение в при измерении угловой скорости лазерного гироскопа со знакопеременной частотной подставкой. Технический результат – повышение точности. Для этого обеспечено формирование на основе выходного сигнала вращения лазерного гироскопа последовательности импульсов, следующих друг за другом через интервалы времени, равные периоду выходного сигнала, подсчет числа импульсов выходного сигнала вращения лазерного гироскопа на каждом полупериоде переключения частотной подставки, определение знака разности частот встречных волн и определение времени начала каждого полупериода. Измеряют интервалы времени между первым и последним импульсом на каждом полупериоде переключения частотной подставки, а также подсчитывают числа импульсов за эти интервалы времени и определяют угловую скорость по формуле: Ω=(N+/t++N-/t-)/2K, где Ω - средняя угловая скорость; t+ и t- - интервалы времени между первым и последним импульсами на полупериоде с положительным и отрицательным знаком частотной подставки соответственно; N+ и N- - числа импульсов, подсчитанные на интервалах времени t+ и t- соответственно, со знаком разности частот встречных волн; K - масштабный коэффициент лазерного гироскопа. Для повышения точности измерения угловой скорости измерение проводят за несколько периодов переключения частотной подставки, а за измеренное значение угловой скорости принимают среднее арифметическое из полученных за каждый период значений угловой скорости. При этом обеспечивается устранение динамических зон захвата в выходной характеристике лазерного гироскопа и повышение точности измерения угловой скорости. 1 з.п. ф-лы, 1 ил.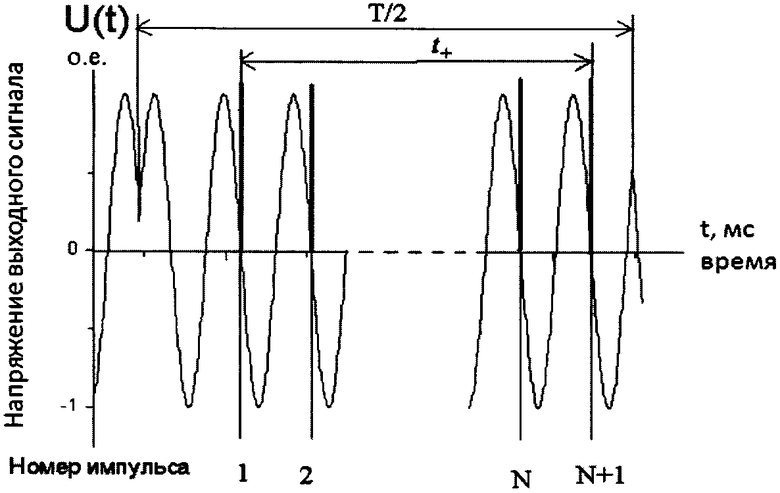
1. Способ измерения угловой скорости лазерного гироскопа со знакопеременной частотной подставкой, включающий формирование на основе выходного сигнала вращения лазерного гироскопа последовательности импульсов, следующих друг за другом через интервалы времени, равные периоду выходного сигнала, подсчет числа импульсов выходного сигнала вращения лазерного гироскопа на каждом полупериоде переключения частотной подставки, определение знака разности частот встречных волн и определение времени начала каждого полупериода переключения частотной подставки, отличающийся тем, что измеряют интервалы времени между первым и последним импульсом на каждом полупериоде переключения частотной подставки, а также подсчитывают числа импульсов за эти интервалы времени и определяют угловую скорость по формуле:
Ω=(N+/t++N-/t-)/2K,
где Ω - угловая скорость;
t+ - интервал времени между первым и последним импульсами на полупериоде с положительным знаком частотной подставки;
t- - интервал времени между первым и последним импульсами на полупериоде с отрицательным знаком частотной подставки;
N+ - число, равное числу импульсов, подсчитанному на интервале времени t+, со знаком разности частот встречных волн;
N- - число, равное числу импульсов, подсчитанному на интервале времени t-, со знаком разности частот встречных волн;
K - масштабный коэффициент лазерного гироскопа.
2. Способ измерения угловой скорости лазерного гироскопа со знакопеременной частотной подставкой по п. 1, отличающийся тем, что измерение проводят за несколько периодов переключения частотной подставки, а за измеренное значение угловой скорости принимают среднее арифметическое из полученных за каждый период значений угловой скорости.
| Azarova V.V | |||
| et al | |||
| Zeeman Laser Gyroscops, Research and Technology Organisation., Optical Gyros and their Application., May, 1999, (5-1)-(5-29) | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ЛАЗЕРНОГО ГИРОСКОПА И СИСТЕМ НА ЕГО ОСНОВЕ | 2006 |
|
RU2307325C1 |
| ОПТИЧЕСКАЯ СХЕМА БЕЗДРЕЙФОВОГО КОЛЬЦЕВОГО ЛАЗЕРНОГО ОДНООСНОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ЛАЗЕРНОГО ГИРОСКОПА | 2010 |
|
RU2454630C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ЛАЗЕРНЫМ ГИРОСКОПОМ СО ЗНАКОПЕРЕМЕННОЙ ЧАСТОТНОЙ ПОДСТАВКОЙ | 2013 |
|
RU2531027C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |

