Изобретение относится к радиотехнике и может быть использовано в радиоаппаратуре для «охоты на лис», в системах радиоконтроля коротковолнового и ультракоротковолнового диапазона.
Известные способы определения местоположения передатчика с помощью переносных пеленгаторов, которые основаны на приеме сигнала передатчика с помощью антенн и приемных устройств, пеленговании передатчика, преимущественно на слух методом максимума или минимума диаграммы направленности антенны, с передвижением в предполагаемом направлении передатчика до момента его визуальной локализации [1. Верхотуров В.Н., Калачев В.А., Кузьмин В.Г. Радиоаппаратура для «охоты на лис». М.: «Энергия», 1976, с.33.], [2. Патент РФ №2236689, 2004, G01S 3/34.], [3. Патент US №3683384, G01S 3/14, опубл. 1973]. Для снижения веса аппаратуры в этих способах применяют малогабаритные антенны и приемники с небольшим (до трех) числом каналов. Основной недостаток таких способов заключается в значительных временных затратах на поиск и определение местоположения передатчика.
Наиболее близким к предлагаемому способу по технической сущности является способ определения местоположения передатчика мобильным (переносным) пеленгатором, заключающийся в том, что принимают радиосигналы передатчика посредством антенн, подключенных к приемнику, измеряют курсовой угол относительно опорного направления и собственные координаты переносного пеленгатора, преобразуют сигналы в пространственный спектр с учетом собственных координат и курсового угла переносного пеленгатора, затем составляющие пространственного спектра со всех возможных направлений передатчика нормируют посредством весов, пропорциональных расчетному ослаблению радиосигналов передатчика при распространении их до переносного пеленгатора [4. Патент РФ №2316784, G01S 5/02, опубл. 2008].
Этот способ включает прием радиосигналов передатчика с помощью всенаправленных антенн, образующих антенную решетку, и приемных устройств, измерение курсового угла и собственных координат мобильного пеленгатора, преобразование принятых радиосигналов в пространственный спектр с учетом собственных координат и курсового угла мобильного пеленгатора, накопление значений пространственного спектра с весами, пропорциональными расчетному ослаблению радиосигналов передатчика при распространении их до мобильного пеленгатора за все время движения пеленгатора, нормировку результатов накопления на среднее квадратичное весов с получением усредненного пространственного спектра и определение местоположения передатчика по максимуму усредненного пространственного спектра. При этом преобразование принятых радиосигналов в пространственный спектр выполняют путем компенсации их расчетных набегов фаз, последующего сложения радиосигналов и определения амплитуды суммарного радиосигнала.
Ближайший аналог позволяет определять местоположение передатчика без непосредственного визуального контакта с ним, однако область применения способа ограничена условием использования всенаправленных пространственно разнесенных антенн. Если в этом способе использовать направленные антенны, то искажается пространственный спектр, что приводит к аномальным погрешностям измерений и не позволяет применять способ, в частности, для «охоты на лис». Порядок учета направленных свойств антенн в совокупности операций над радиосигналами при определении местоположения передатчика не описан в источнике информации [4. Патент РФ №2316784].
Задачей данного изобретения является расширение функциональных возможностей, обеспечение области применимости способа для определения местоположения передатчика в системах с направленными антеннами.
Технический результат, который может быть получен при осуществлении способа, - уменьшение времени и повышение точности определения местоположения передатчика, а также улучшение помехозащищенности.
Поставленная задача и технический результат достигается за счет того, что в известном способе определения местоположения передатчика переносным пеленгатором, включающем прием радиосигналов передатчика посредством антенн, подключенных к приемнику, измерение курсового угла относительно опорного направления и собственных координат переносного пеленгатора, преобразование сигналов в пространственный спектр с учетом собственных координат и курсового угла переносного пеленгатора, нормирование составляющих пространственного спектра со всех возможных направлений передатчика посредством весов, пропорциональных расчетному ослаблению радиосигналов передатчика при распространении их до переносного пеленгатора, согласно изобретению предварительно определяют диаграммы направленности антенн в возможных направлениях передатчика, для каждого возможного местоположения передатчика определяют пеленг посредством курсового угла пеленгатора и его координат, определяют значения диаграмм направленности антенн с учетом соответствующего пеленга, которые умножают на принятые радиосигналы, полученные сигналы преобразуют в пространственный спектр, определяют среднее квадратичное весовых коэффициентов, полученных перемножением весов, пропорциональных расчетному ослаблению радиосигналов передатчика при распространении их до переносного пеленгатора, на сигналы, несущие информацию о значениях диаграмм направленности антенн с учетом соответствующего пеленга, нормированные составляющие пространственного спектра со всех возможных направлениях передатчика дополнительно нормируют на величину обратную среднему квадратичному весовых коэффициентов, направление максимального из которых соответствует местоположению передатчика.
Предложенный способ отличается от известного наличием новых действий над радиосигналами, условиями и порядком их выполнения, а именно:
- предварительно до начала измерений определяют диаграммы направленности антенн;
- принятые радиосигналы дополнительно умножают на значения диаграмм направленности антенн в направлении передатчика;
- весовые коэффициенты определяют умножением соответствующих весов на значения диаграмм направленности антенн в направлении передатчика.
Указанные преимущества, а также особенности настоящего изобретения поясняются вариантом его выполнения со ссылками на прилагаемые чертежи.
Фиг.1 изображает структурную схему переносного пеленгатора для реализации заявленного способа;
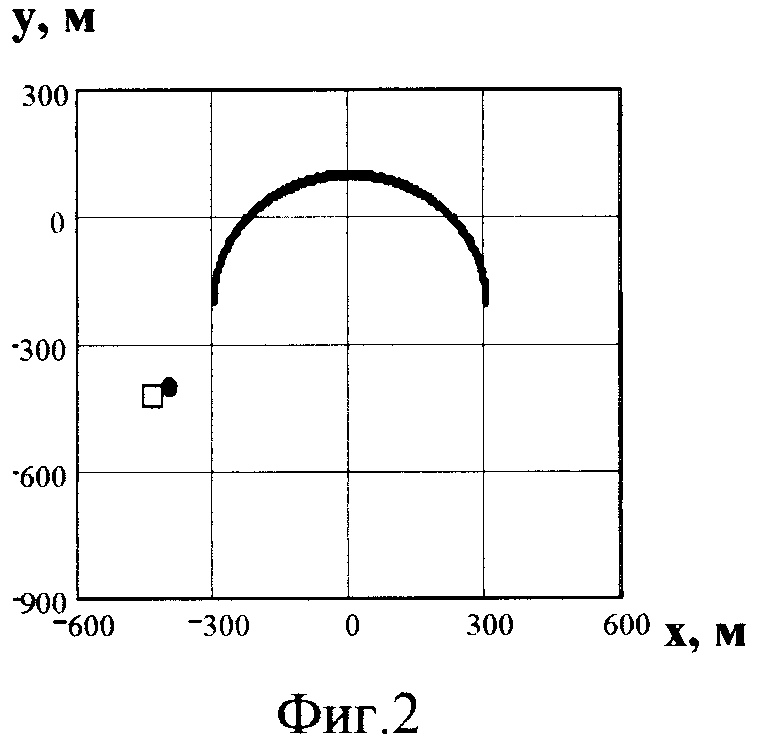
фиг.2 - маршрут движения переносного пеленгатора, где «квадратиком» показано местоположение передатчика, «точкой» - результат его местоопределения в конце маршрута;
фиг.3 - напряженность поля передатчика на маршруте движения;
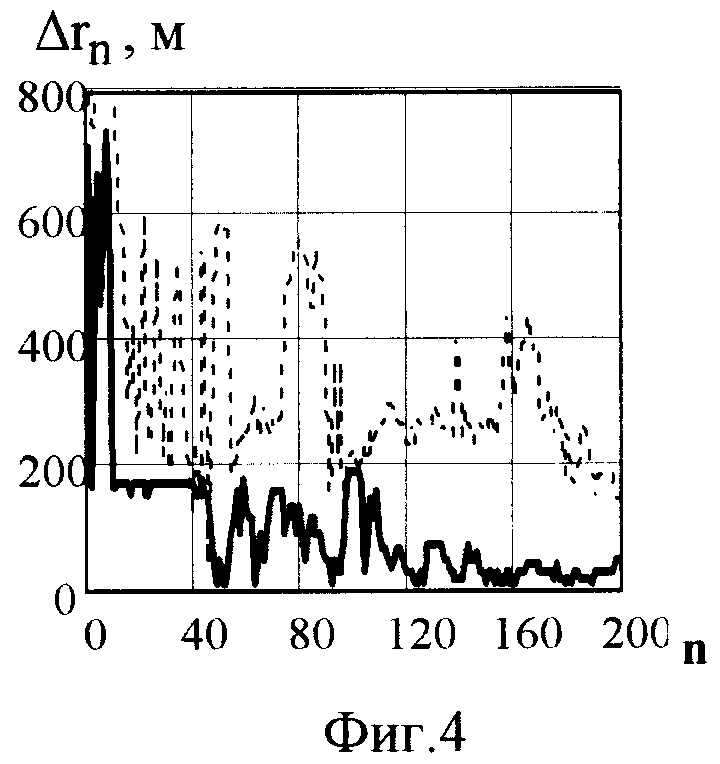
фиг.4 - линейная ошибка определения местоположения передатчика на маршруте движения.
Идея решения поставленной технической задачи заключается в получении и использовании информации о диаграммах направленности антенн пеленгатора для измерения распределения уровня радиоизлучения передатчика в пространстве. В результате предлагаемого умножения принятых радиосигналов и нормировки пространственный спектр сигналов определяется с учетом значений диаграмм направленности антенн в направлении возможного местоположения передатчика (координат составляющих пространственного спектра). Весовые коэффициенты устанавливают из условия обеспечения несмещенной оценки мощности передатчика с максимумом пространственного спектра в направлении передатчика. Это позволяет, с одной стороны, придать больший вес измерениям с большими значениями диаграмм направленности и ослабить действие шумов и помех, а с другой, согласовать применение весовой обработки, учитывающей ослабление радиосигналов при распространении радиоволн. Как следствие, достигается устранение аномальных погрешностей измерения координат передатчика, повышение точности относительно вариантов с ненаправленными антеннами, уменьшение времени определения местоположения передатчика по сравнению с аналогами (способами «охоты на лис»).
Таким образом, получение и использование информации о диаграммах направленности антенн пеленгатора, в соответствии с предложенными новыми действиями над радиосигналами, условиями и порядком их выполнения, позволяет расширить область применимости способа на системы с направленными антеннами и уменьшить время определения местоположения передатчика.
Поскольку заявленный способ может быть реализован при использовании соответствующего устройства переносного пеленгатора, то далее описывается характерный состав функциональных элементов такого пеленгатора.
Переносной пеленгатор (фиг.1), реализующий предложенный способ, содержит антенный блок 1, компас 2, приемник 3, навигационный прибор 4, блок 5 умножения, процессор 6 диаграмм, анализатор 7 пространственного спектра, блок 8 усреднения и индикатор 9. Антенный блок 1, приемник 3, через первые входы (1) блока 5 умножения, анализатора 7 пространственного спектра и блока 8 усреднения и индикатор 9 соединены последовательно. Компас 2 подключен к первому входу (1) процессора 6 диаграмм, ко второму входу (2) которого и третьим входам (3) анализатора 7 пространственного спектра и блока 8 усреднения подключен навигационный прибор 4. Компас 2 соединен со вторым входом (2) анализатора 7 пространственного спектра. Выход процессора диаграмм 6 соединен со вторыми входами (2) блока 5 умножения и блока 8 усреднения. Выходом переносного пеленгатора является индикатор 9.
Антенный блок 1 малогабаритный, его положением управляет оператор. Компас 2 укреплен непосредственно на антенном блоке 1, что позволяет измерять его угловое положение (курсовой угол) относительно опорного направления (например, на Север). Прием радиосигналов передатчика выполняют с помощью М антенн блока 1 и приемника 3 с числом каналов М, равным числу антенн (на фиг.1 для простоты чтения чертежа не показаны). Приемник 3 цифровой, с представлением выходных сигналов в комплексном виде, то есть через квадратурные составляющие; может быть выполнен, например, по варианту, приведенному в [5. Побережский К.С. Цифровые радиоприемные устройства. М., Радио и связь, 1987, с.67-68, рис.3.14]. Собственные координаты переносного пеленгатора измеряют с помощью навигационного прибора 4. Блок 5 умножения обеспечивает умножение принятых радиосигналов, необходимые при этом значения диаграмм направленности антенн определяются процессором 6 диаграмм с учетом показаний компаса 2 и навигационного прибора 4. Анализатор 7 пространственного спектра по представлении в виде блока совпадает с анализатором пространственного спектра 4 в источнике информации [4]. Блок 8 усреднения обеспечивает, во-первых, определение весов и весовое накопление (усреднение) пространственного спектра, во-вторых, определение весовых коэффициентов и их среднее квадратичное усреднение, в-третьих, нормировку результатов накопления пространственного спектра на среднее квадратичное весовых коэффициентов с получением усредненного пространственного спектра и определением положения его максимума. Необходимые для определения весов собственные координаты пеленгатора привлекаются с навигационного прибора 4 и поступают на вход 3 блока 8 усреднения, а значения диаграмм направленности для определения весовых коэффициентов поступают с процессора 6 диаграмм по входу (2) блока 8 усреднения. Функции блока 8 усреднения, а также функции блоков 5-7 и 9 (фиг.1) могут быть реализованы на основе современных ноутбуков в соответствии с математическими выражениями, приведенными ниже в данном описании. Кроме того, упомянутые блоки могут быть выполнены в виде простых специализированных вычислительных устройств с дисплеем.
Принцип последующего функционирования мобильного переносного пеленгатора, в котором реализуется предложенный способ, состоит в следующем.
Предварительно, до начала непосредственно процесса поиска определяют диаграммы направленности антенн в возможных направлениях на передатчик Dm(Θ), где m - номер антенны, Θ - угол ориентации антенного блока 1 в горизонтальной плоскости. Отсчет Θ выполняют от оси антенного блока 1 по часовой стрелке. Диаграммы могут быть определены теоретическими методами или по результатам предварительных измерений. Наиболее распространенные переносные направленные антенны имеют вид восьмерки D1(Θ)=cos(Θ), D2(Θ)=sin(Θ) или кардиоиды D1(Θ)=0,5·(1-cos(Θ)). Априорно известные параметры значений диаграмм предварительно вводят в процессор 6 по входу (3) и запоминают в нем.
В процессе поиска и движения с помощью антенного блока 1 и приемника 2 принимают радиосигналы передатчика  где n=1, 2, …, N - номер измерения при общем количестве измерений - N, m=1, 2, …, М - номер антенны при общем числе М, компасом 2 измеряют курсовой угол ψn и собственные координаты переносного пеленгатора
где n=1, 2, …, N - номер измерения при общем количестве измерений - N, m=1, 2, …, М - номер антенны при общем числе М, компасом 2 измеряют курсовой угол ψn и собственные координаты переносного пеленгатора  с помощью навигационного прибора 4. Координаты пеленгатора представлены в декартовой (x - абсцисса, у - ордината) системе координат, в комплексном виде, i - мнимая единица.
с помощью навигационного прибора 4. Координаты пеленгатора представлены в декартовой (x - абсцисса, у - ордината) системе координат, в комплексном виде, i - мнимая единица.
В процессоре 6 для каждого возможного местоположения передатчика с координатами  квантованными с шагом, определяемым допустимой линейной ошибкой местоопределения, с учетом курсового угла ψn пеленгатора и его координат
квантованными с шагом, определяемым допустимой линейной ошибкой местоопределения, с учетом курсового угла ψn пеленгатора и его координат  определяют пеленг
определяют пеленг

Пеленг /1/ определен в местной системе координат переносного пеленгатора, то есть относительно оси антенного блока 1. Затем из процессора 6 диаграмм (где ранее запомнены значения диаграмм направленности антенн во всех возможных направлениях) извлекают соответствующие расчетным пеленгам /1/ значения диаграмм направленности антенн в направлении передатчика, то есть Dm(θn(x, у)). С выхода процессора 6 значения Dm(θn(x, y)) передают в блок 5 умножения (вход (2)). Здесь принятые сигналы умножают на значения диаграмм направленности антенн антенного блока 1 в направлении передатчика с получением сигналов вида

Последующее преобразование сигналов в пространственный спектр выполняют в соответствии с источником информации [4], и для входных сигналов /2/, поступающих на вход (1) анализатора 7 пространственного спектра:

где  - расчетные набеги фаз принятых радиосигналов в местах расположения антенн, π=3,14…, λ - длина волны излучения, bm, αm - координаты антенн в местной полярной системе координат, соответственно удаление от центра антенного блока 1 и угол относительно его оси.
- расчетные набеги фаз принятых радиосигналов в местах расположения антенн, π=3,14…, λ - длина волны излучения, bm, αm - координаты антенн в местной полярной системе координат, соответственно удаление от центра антенного блока 1 и угол относительно его оси.
Необходимые для преобразования /3/ измерения курсового угла и собственных координат пеленгатора поступают соответственно с компаса 2 и навигационного прибора 4 по входам (2), (3) анализатора 7 пространственного спектра. В соответствии с формулой /3/ набеги фаз сигналов (и соответственно принятых сигналов), обусловленные различием расстояний от передатчика до антенн антенного блока 1, компенсируют, после чего их складывают и определяют амплитуду суммарного сигнала. Для пеленгаторов с совмещенными фазовыми центрами антенн φn,m(х, у)=0, преобразование в пространственный спектр /3/ упрощается и переходит в операцию линейного детектирования суммарного сигнала 
С выхода анализатора 7 составляющие пространственного спектра поступают на вход (1) блока 8 усреднения, где выполняют накопление пространственного спектра за все время движения переносного пеленгатора с весами, пропорциональными расчетному ослаблению радиосигналов передатчика при распространении их до переносного пеленгатора

Ослабление в зоне прямой радиовидимости обратно пропорционально квадрату расстояния между пеленгатором и передатчиком, соответственно веса определяют по формуле

Необходимые собственные координаты пеленгатора привлекаются с навигационного прибора 4 и поступают на вход (3) блока 8 усреднения. При наличии информации о рельефе местности, например картографической, могут быть использованы другие известные методики более точного расчета множителя ослабления. В предельном случае возможна установка весов, равных единице, когда учитывается информация только о направлении передатчика. При этом влияние направленности антенн на результаты измерений возрастает.
Одновременно с накоплением /4/ в блоке 8 усреднения определяют весовые коэффициенты, путем умножения весов /5/ на значения диаграмм направленности антенн в направлении возможного местоположения передатчика, поступающих с процессора 6 диаграмм по входу (2) блока 8 усреднения

и среднее квадратичное этих весовых коэффициентов

Затем выполняют нормировку результатов /4/ накопления пространственного спектра на среднее квадратичное 111 весовых коэффициентов с получением усредненного пространственного спектра

На завершающей стадии в блоке 8 усреднения определяют положение максимума усредненного пространственного спектра /8/ и выдают результат на индикатор 9, как оценку местоположения передатчика в N-й момент наблюдения.
Усредненный пространственный спектр /8/ характеризует уровень радиоизлучения передатчика в предположении нахождения его в соответствующих точках пространства. Координаты (x, у) составляющих (значений) пространственного спектра есть возможные места расположения передатчика. Максимум усредненного спектра сосредоточен в окрестности истинного местоположения передатчика. Доказать последнее утверждение можно с привлечением неравенства Коши-Буняковского [6. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. - М.: Наука, 1986, с.142], согласно которому максимум спектра /8/ имеет место тогда и только тогда, когда отношение его компонент  и
и  есть величина постоянная. Именно в точке истинных координат передатчика указанное постоянство выполняется.
есть величина постоянная. Именно в точке истинных координат передатчика указанное постоянство выполняется.
При поступлении данных очередного измерения указанные операции циклически повторяют, таким образом, в процессе движения переносного пеленгатора непрерывно уточняют местоположение передатчика. По результатам измерений оператор, в зависимости от практических задач, осуществляет движение по заранее заданному маршруту или в направлении передатчика при его поиске.
Эффективность изобретения выражается в расширении функциональных возможностей, обеспечении области применимости способа в системах с направленными антеннами, в уменьшении времени и повышении точности определения местоположения передатчика по сравнению с известными способами «охоты на лис».
Количественная оценка выполнена применительно к переносному пеленгатору с тремя антеннами типа скрещенные рамки и штырь. Имитировалось движение пеленгатора с постоянной скоростью по дуге (фиг.2) против часовой стрелки с проведением N=200 измерений. Передатчик расположен в пункте указанным квадратиком. Прием радиосигналов передатчика осуществлялся на фоне шумов и помех, в результате чего флуктуации напряженности En поля передатчика в точках приема, в соответствии с показанным на фиг.3, составляют около 10 дБ. Линейные ошибки определения местоположения передатчика на маршруте движения в таких условиях показаны на фиг.4, соответственно пунктиром для способа - ближайшего аналога и сплошной линией - для заявленного технического решения. В отличие от способа - ближайшего аналога, для которого характерны аномальные погрешности измерений по всему маршруту, в предлагаемом способе во второй половине дистанции линейная ошибка снижается до величины менее 50 м. Для определения местоположения аналогичными способами «охоты на лис» необходимо пройти дополнительно как минимум половину маршрута (до визуального контакта с передатчиком), поэтому время определения местоположения передатчика предлагаемым способом сокращается не менее чем в два раза.
Наиболее успешно заявленный способ определения местоположения передатчика переносным пеленгатором промышленно применим для нахождения местоположения наземных источников радиоизлучения коротковолнового и ультракоротковолнового диапазонов, в том числе в городских условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАДИОПЕРЕДАТЧИКА МОБИЛЬНОЙ СТАНЦИЕЙ РАДИОКОНТРОЛЯ | 2006 |
|
RU2307372C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТРУКТУРЫ СИМПЛЕКСНОЙ РАДИОСЕТИ МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2008 |
|
RU2383031C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ БАЗОВОЙ СТАНЦИИ | 2011 |
|
RU2454000C1 |
| СПОСОБ ОДНОПУНКТНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА КОРОТКОВОЛНОВОГО ИЗЛУЧЕНИЯ | 2012 |
|
RU2523650C2 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
| Способ одноэтапного адаптивного определения координат источников радиоизлучений | 2021 |
|
RU2768011C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2018 |
|
RU2695642C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОСИГНАЛОВ КОНТРОЛИРУЕМОГО ОБЪЕКТА И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА | 2011 |
|
RU2496118C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2005 |
|
RU2289146C9 |

Изобретение относится к способу определения местоположения передатчика переносным пеленгатором. Техническим результатом является уменьшение времени и повышение точности определения местоположения передатчика, а также улучшение помехозащищенности. Для этого используют информацию о диаграммах направленности антенн пеленгатора для измерения распределения уровня радиоизлучения передатчика в пространство. После умножения принятых радиосигналов и нормировки пространственный спектр сигналов определяется с учетом значений диаграмм направленности антенн в направлении возможного местоположения передатчика (координат составляющих пространственного спектра). Весовые коэффициенты устанавливают из условия обеспечения несмещенной оценки мощности передатчика с максимумом пространственного спектра в направлении передатчика. 4 ил.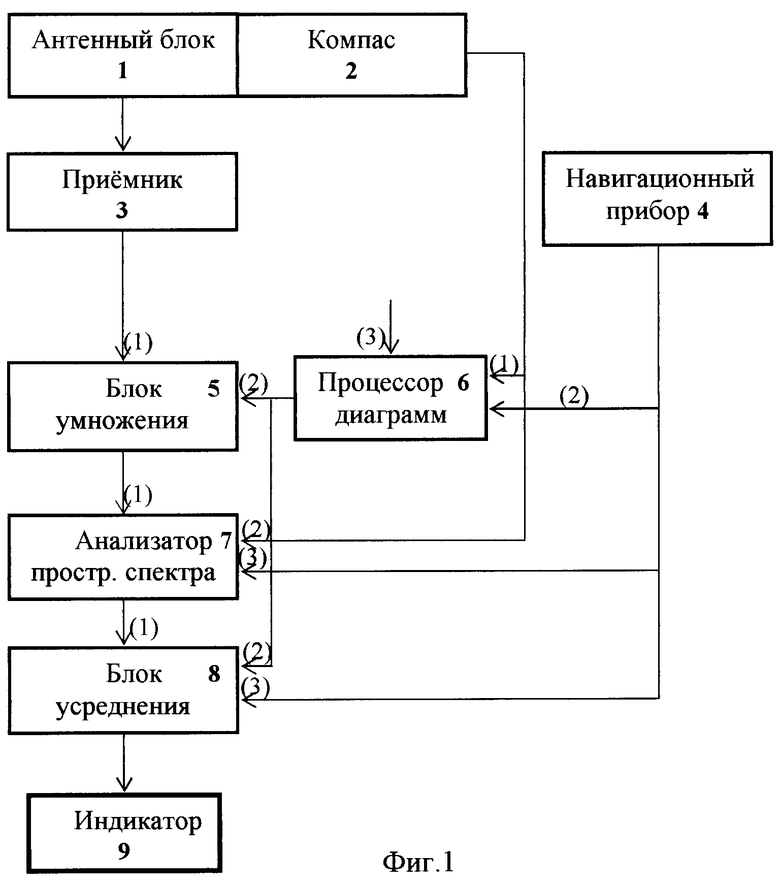
Способ определения местоположения передатчика переносным пеленгатором, заключающийся в том, что принимают радиосигналы передатчика посредством антенн, подключенных к приемнику, измеряют курсовой угол относительно опорного направления и собственные координаты переносного пеленгатора, преобразуют сигналы в пространственный спектр с учетом собственных координат и курсового угла переносного пеленгатора, затем составляющие пространственного спектра со всех возможных направлений передатчика нормируют посредством весов, пропорциональных расчетному ослаблению радиосигналов передатчика при распространении их до переносного пеленгатора, отличающийся тем, что предварительно определяют диаграммы направленности антенн в возможных направлениях передатчика, для каждого возможного местоположения передатчика определяют пеленг посредством курсового угла пеленгатора и его координат, определяют значения диаграмм направленности антенн с учетом соответствующего пеленга, которые умножают на принятые радиосигналы, полученные сигналы преобразуют в пространственный спектр, определяют среднее квадратичное весовых коэффициентов, полученных перемножением весов, пропорциональных расчетному ослаблению радиосигналов передатчика при распространении их до переносного пеленгатора, на сигналы, несущие информацию о значениях диаграмм направленности антенн с учетом соответствующего пеленга, нормированные составляющие пространственного спектра со всех возможных направлениях передатчика дополнительно нормируют на величину, обратную среднему квадратичному весовых коэффициентов, направление максимального из которых соответствует местоположению передатчика.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО МЕСТОПОЛОЖЕНИЯ N-ОБЪЕКТОВ | 1994 |
|
RU2111503C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2201599C1 |
| EP 1601989 A1, 07.12.2005 | |||
| KR 840000261 B1, 08.03.1984. | |||

