Изобретение относится к области измерительной техники и может быть применено в авиадвигателестроении, машиностроении и других областях техники для определения геометрических параметров профиля, в том числе координат точек поверхности объекта.
Известен бесконтактный измеритель расстояний, содержащий два измерительных канала, каждый из которых состоит из оптически связанных генератора световой линии, двух объективов, двух фотоприемных матриц, выходы которых подключены к входу вычислительного блока (патент RU №2124700, G01B 11/00, опубликован 10.01.99 г.). Недостатком известного устройства является сложность конструкции, низкая точность и дороговизна, обусловленные тем, что, например, для измерения профиля лопатки компрессора или турбины требуется применение в устройстве четырех цифровых матричных телекамер, двух вычислительных блоков. Кроме того, при эксплуатации устройства из-за различного воздействия внешних факторов (вибрации, паразитного светового фона и т.д.) на компоненты устройства приводит к ошибке измерения.
Известен так же способ определения координат поверхности объекта и устройство для его осуществления (А.С. SU №1589055, G01B 21/00, опубликован 30.08.90). Устройство содержит светоизлучающую матрицу, оптически связанную с фотоприемной матрицей, вычислительный блок, к входу которого подключен выход измерительного блока, вход которого подключен к выходу фотоприемной матрицы, и управляющий блок, вход которого подключен к выходу светоизлучающей матрицы, и блок акселерометров, выходы которых подключены к входу вычислительного блока.
Недостатком известного устройства является низкая точность и сложность конструкции устройства. Низкая точность обусловлена измерением ограниченного и фиксированного количества точек поверхности. Сложность конструкции заключается в использовании дополнительного блока акселерометров, состоящего из трех акселерометров, расположенных по трем ортогональным осям.
Известно устройство для измерения формы объекта, содержащее установленные на неподвижной платформе две светоизлучающие системы, формирующие световые линии на заданных участках, установленного на неподвижной платформе объекта измерения, зеркала, расположенные под острым углом к его поверхности и оптически связанные через объектив с фотоприемной матрицей, выход которого подключен к входу вычислительного блока, на выход которого подключен дисплей (заявка №2003126225/28 (028283), кл. G01B 21/00, приоритет 29.08.2003, решение о выдаче патента 28.01.2005 г., прототип).
Недостатком этого устройства является низкая точность. Это связано тем, что точки поверхности объектов сложной формы определяются тремя пространственными координатами (x, y, z), а известное устройство позволяет определить только две из них (x, y). В известном устройстве для определения координаты z необходимо установить дополнительно дорогостоящий и сложный датчик абсолютного положения платформы, что значительно усложняет конструкцию устройства.
Задачей изобретения является повышение точности измерения координат точек объекта и упрощение конструкции устройства.
Поставленная задача решается тем, что в устройстве для измерения координат поверхности объекта сложной формы, содержащем установленные на неподвижной платформе светоизлучающие системы, формирующие световые линии на заданных участках, установленного на подвижной платформе объекта, зеркала, расположенные под острым углом к его поверхности и оптически связанные через объектив с фотоприемной матрицей, выход которой подключен к входу вычислительного блока, на выход которого подключен дисплей, в отличие от известного устройства дополнительно введены установленное на подвижной платформе по ходу его движения зеркало и оптически связанные с ним излучатель, зеркало и экран, установленные на неподвижной платформе, при этом излучатель формирует световое пятно на экране, расположенном в поле зрения объектива, формирующего на фотоприемной матрице изображение светового пятна с экрана, а дополнительно введенные зеркала установлены под острым углом друг к другу таким образом, что изображение светового пятна на фотоприемной матрице перемещается пропорционально перемещению подвижной платформы.
Излучатель генерирует световой пучок с малым углом расхождения, что обеспечивает незначительное изменение поперечного сечения луча при значительных изменениях оптической длины пути.
Излучатель формирует на экране световое пятно малого размера, что обеспечивает малый размер изображения пятна на фотоприемной матрице, тем самым достигается высокое разрешение по оси Z.
На чертеже представлена схема устройства для измерения координат поверхности объекта сложной формы.
Направления световых лучей указаны стрелками. В качестве объекта измерения показана лопатка газотурбинного двигателя.
Устройство для измерения координат поверхности объекта сложной формы содержит три светоизлучающие системы, оптически связанные через объектив 1 с фотоприемником 2, расположенным с торцевой части объекта измерения (лопатки) 3, закрепленного на подвижной платформе 4 посредством узла крепления 5. Две светоизлучающие системы, состоящие из генераторов световых линий 6 и плоских зеркал 7, закреплены на неподвижной платформе 8. Третья светоизлучающая система состоит из точечного излучателя 9, зеркала 10, экрана 11, закрепленных на платформе 8, и зеркала 12, установленного на платформе 4.
Зеркала 10 и 12 установлены под острым углом друг к другу, обеспечивая оптическую связь излучателя 9 с экраном 11, расположенным в поле зрения объектива 1. Фотоприемник 2 выполнен на базе фотоприемной матрицы 13, выход которого подключен к входу вычислительного блока 14, на выход которого подключен дисплей 15. Зеркала 7 расположены симметрично относительно измеряемых поверхностей под острым углом к объекту измерения 3, обеспечивая оптическую связь с фотоприемником 2.
Платформа 4 имеет возможность перемещения относительно платформы 8.
Устройство работает следующим образом. При включении устройства излучатели 6 формируют на поверхности объекта измерения 3 («спинки» и «корыта» лопатки) световые линии на измеряемом сечении, повторяющие рельеф поверхности, а излучатель 9 - световое пятно на экране 11. Объектив 1 фотоприемника 2 формирует на фотоприемной матрице 13 изображения световых линий «спинки» и «корыта» лопатки через зеркала 7 и светового пятна с экрана 11.
Преобразованное в электрический сигнал изображение передается в вычислительный блок 14, где осуществляется вычисление координат «спинки» и «корыта» измеряемого сечения лопатки 3, а так же определение положения изображения светового пятна, соответствующей координате z. Для измерения следующего сечения перемещают платформу 4 вдоль оптической оси объектива 1 (ось Z) на величину Δz, при этом световые линии на лопатке 3, зеркало 12 и световое пятно на экране 11 занимают положение II соответственно приращению Δz. На фотоматрице 13 изображение светового пятна перемещается из положения I в положение II пропорционально перемещению платформы 4 на величину kΔz, при этом за счет того, что экран 11 неподвижно закреплен на платформе 8 и расстояние от светового пятна до объектива 1 остается постоянным при перемещении платформы 4, расфокусировки изображения пятна не происходит. Коэффициент пропорциональности k определяется угловым расположением зеркал 10 и 12.
Начало отсчета координат (х=0, y=0, z=0) выбирается в зависимости от требований к контролируемому объекту.
Таким образом, на совмещенном изображении «спинки» и «корыта» сечения лопатки 3 на дисплее 15 у каждой точки линии определены пространственные координаты x, y, z.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ ОБЪЕКТА | 2003 |
|
RU2256149C2 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256878C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ И ИНДИКАЦИИ ТОЧЕК ПОРАЖЕНИЯ ЛАЗЕРНЫХ ИМИТАТОРОВ СТРЕЛЬБЫ | 2006 |
|
RU2316713C1 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2001 |
|
RU2204821C1 |
| РЕНТГЕНООПТИЧЕСКИЙ ЭНДОСКОП | 2009 |
|
RU2413206C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ КИНООПЕРАТОРА | 1991 |
|
RU2032200C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2456542C2 |
| СПОСОБ ОРИЕНТИРОВАНИЯ В ПРОСТРАНСТВЕ ДВИЖУЩЕГОСЯ ТРАНСПОРТА ПО СВЕТОВОМУ ЛУЧУ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2322371C2 |
| СТЕРЕОПРОЕКЦИОННАЯ СИСТЕМА | 2005 |
|
RU2322771C2 |
| ТЕЛЕВИЗИОННО-ЛАЗЕРНЫЙ ВИЗИР-ДАЛЬНОМЕР | 2012 |
|
RU2515766C2 |
Устройство для измерения координат поверхности объекта сложной формы содержит установленные на неподвижной платформе светоизлучающие системы, формирующие световые линии на заданных участках установленного на подвижной платформе объекта. Кроме того зеркала, расположенные под острым углом к его поверхности и оптически связанные через объектив с фотоприемной матрицей, выход которого подключен к входу вычислительного блока, на выход которого подключен дисплей. Дополнительно введены установленное на подвижной платформе по ходу его движения зеркало и оптически связанные с ним излучатель, зеркало и экран, установленные на неподвижной платформе. При этом излучатель формирует световое пятно на экране, расположенном в поле зрения объектива, формирующего на фотоприемной матрице изображение светового пятна с экрана. Дополнительно введенные зеркала установлены под острым углом друг к другу таким образом, что изображение светового пятна на фотоприемной матрице перемещается пропорционально перемещению подвижной платформы. Излучатель генерирует световой пучок с малым углом расхождения. Излучатель формирует на экране световое пятно малого размера. Технический результат - повышение точности измерения координат точек объекта и упрощение конструкции устройства. 2 з.п. ф-лы, 1 ил.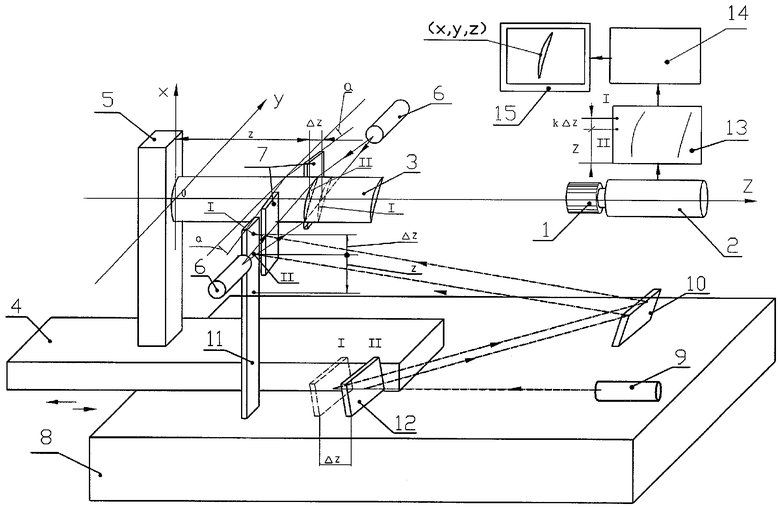
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ ОБЪЕКТА | 2003 |
|
RU2256149C2 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| Способ определения координат поверхности объекта и устройство для его осуществления | 1988 |
|
SU1589055A1 |
| US 5666204 A, 09.09.1997 | |||
| US 4770537 A, 13.09.1988. | |||

