Изобретение относится к измерительной технике, в частности к способам измерения формы объекта и устройствам для его осуществления, и может быть использовано в авиадвигателестроении, машиностроении и других областях техники для измерения геометрических параметров профиля поверхности объекта оптоэлектронным методом.
Известен способ измерения формы объекта, включающий одновременное освещение двух различных участков заданного сечения объекта двумя светоизлучающими системами в направлении, перпендикулярном заданному сечению, наблюдение теневого изображения исследуемой детали, регистрацию геометрических параметров его контура, выделение на этом контуре и изображениях следов световых линий координат идентичных точек поверхности и определение по взаимным соотношениям координат этих точек на разных изображениях геометрических параметров взаимного расположения упомянутых участков поверхности исследуемой детали (см. патент RU №2105265, Кл. G 01 B 11/24, опубл. 20.02.1998).
Данный способ сложен в исполнении и, кроме того, не позволяет с высокой степенью точности измерить форму объекта, так как не учитывает зону искажения, появляющуюся на изображении из-за блика, формирующегося в зоне действия лучей, падающих по нормали к поверхности, на поверхности из-за кривизны и качества обработки поверхности.
Наиболее близким к предложенному является способ измерения формы объекта, включающий освещение объекта одной светоизлучающей системой, формирующей в одном направлению узкую зондирующую световую линию по нормали к поверхности объекта, формирование изображения освещенных точек объекта, определение координат точек объекта вдоль зондирующей световой линии и обработку изображения (см. патент RU №2124700, Кл. G 01 B 11/00, опубл. 10.01.1999 г.).
Недостаток данного способа заключается в низкой точности определения формы объекта. Это обусловлено тем, что на изображение световой линии на поверхности объекта в зоне действия лучей, падающих по нормали к поверхности, формируется зона блика из-за кривизны и качества обработки поверхности. Это приводит к потере информации о кривизне поверхности на этом участке и, как следствие, к ошибке в определении координаты.
Известно устройство для измерения формы объекта, содержащее две симметрично расположенные относительно измеряемых поверхностей объекта светоизлучающие системы, фотоприемники и вычислительный блок, при этом светоизлучающие системы оптически связаны с фотоприемниками, выход каждого из которых подключен ко входу вычислительного блока (см. патент RU №2105265, Кл. G 01 B 11/24, опубл. 20.02.1998 г.).
Недостаток данного устройства - низкая точность измерения, поскольку при измерении не учитывается влияние зоны искажения, сформированной бликами.
Наиболее близким к предложенному устройству является устройство для измерения формы объекта, содержащее светоизлучающую систему, оптически связанную с фотоприемником, и вычислительный блок (см. патент RU №2124700, Кл. G 01 B 11/00, опубл. 10.01.1999 г.).
Недостаток данного устройства - низкая точность измерения из-за невозможности исключения влияния на результаты измерений зоны блика, формирующейся на измеряемой поверхности объекта.
Технический результат, относящийся к способу, - повышение точности измерения путем исключения влияния зоны искажения на результаты измерений.
Технический результат, относящийся к устройству, - повышение точности измерения путем исключения влияния зоны искажения на результаты измерений.
Технический результат, относящийся к способу, достигается тем, что в способе измерения формы объекта, включающем формирование на поверхности объекта с помощью светоизлучающей системы световой линии, лежащей в заданном сечении объекта, получение изображения световой линии, его обработку и определение координат профиля сечения объекта, согласно изобретению, формируют совпадающие на поверхности световые линии поочередно с помощью, по меньшей мере, двух светоизлучающих систем, освещающих поверхность в заданном сечении объекта под разными углами в каждой ее точке, получают изображения световых линий, на каждом из них выявляют неискаженные участки, из изображений указанных участков компилируют результирующее изображение, по которому осуществляют определение координат профиля сечения объекта.
Для повышения точности контроля и производительности путем обеспечения возможности измерения детали с двух противоположных сторон можно дополнительно формировать световые линии в той же плоскости с противоположной стороны измеряемого объекта в заданном сечении.
Технический результат, относящийся к устройству, достигается тем, что устройство для измерения формы объекта, содержащее светоизлучающую систему, оптически связанную с фотоприемником, и вычислительный блок, согласно изобретению, содержит, по меньшей мере, одну дополнительную светоизлучающую систему, оптически связанную с фотоприемником, и блок коммутации, подключенный входом к одному из выходов вычислительного блока, а выходом - к каждой светоизлучающей системе, при этом фотоприемник подключен выходом ко входу вычислительного блока, оптические оси светоизлучающих систем размещены в одной плоскости и расположены друг к другу под углом, равным 5-80°.
Расположение оптических осей под углом 5-80° позволяет “разнести” зоны бликов на изображении от каждой светоизлучающей системы по разным участкам сечения исследуемого (измеряемого) объекта в зависимости от кривизны и качества поверхности и устранить тем самым их влияние на результаты измерения; при выходе за границы указанного диапазона достоверность результатов измерения очень низкая, поскольку невозможно учесть влияние блика на изображение из-за невозможности разнесения зоны бликов по участкам измеряемого сечения.
В случае измерения деталей сложной формы, а также для повышения точности контроля и производительности устройство может содержать, по меньшей мере, две дополнительные светоизлучающие системы, размещенные в той же плоскости с противоположной стороны исследуемого объекта, и второй фотоприемник, оптически связанный с дополнительными светоизлучающими системами и подключенный выходом к дополнительному входу вычислительного блока, при этом оптические оси светоизлучающих систем расположены друг к другу под углом, равным 5-80°.
Устройство может содержать дисплей, подключенный входом к другому выходу вычислительного блока, что позволяет визуализировать результаты измерений.
Для упрощения конструкции светоизлучающие системы могут быть выполнены в виде генераторов световых линий.
В качестве объекта измерения могут быть выбраны лопатки газотурбинного двигателя.
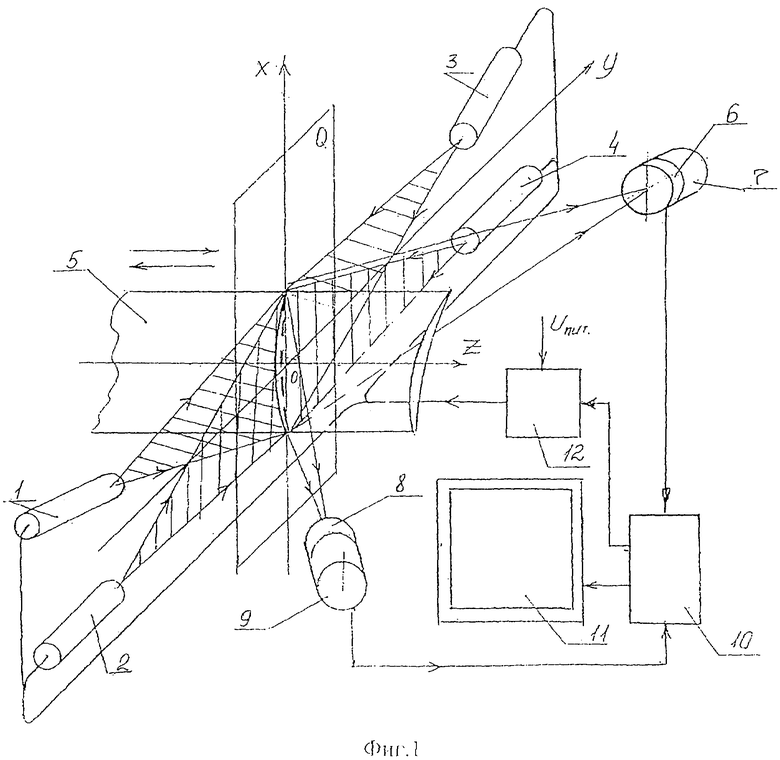
На фиг.1 схематично изображено устройство для измерения формы объекта;
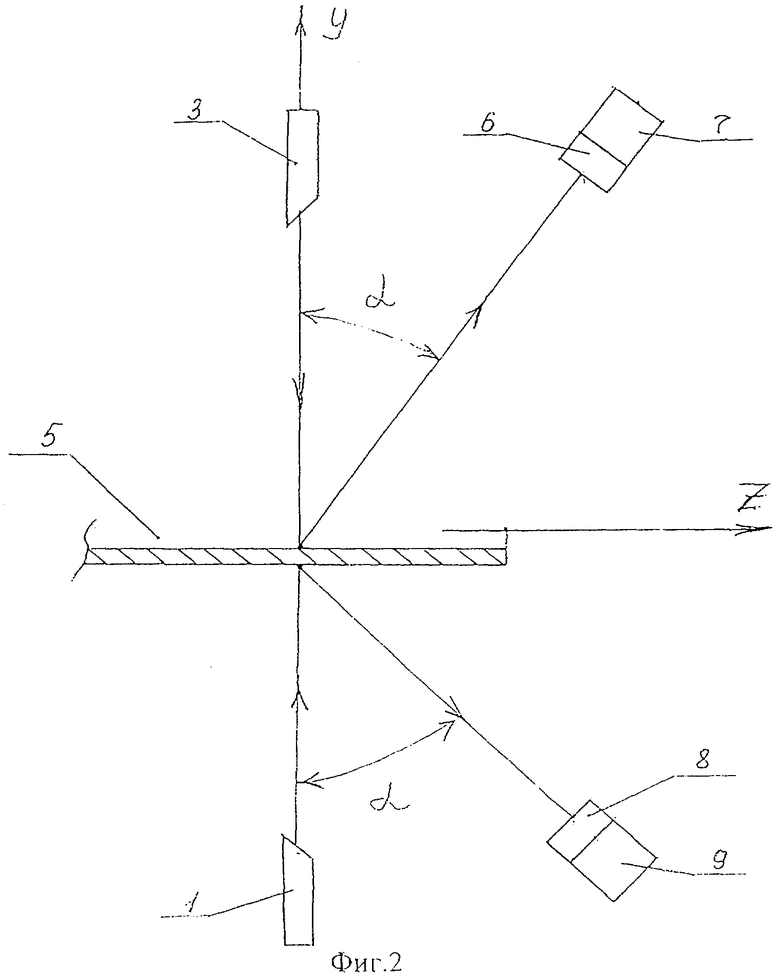
на фиг.2 - оптическая схема устройства;
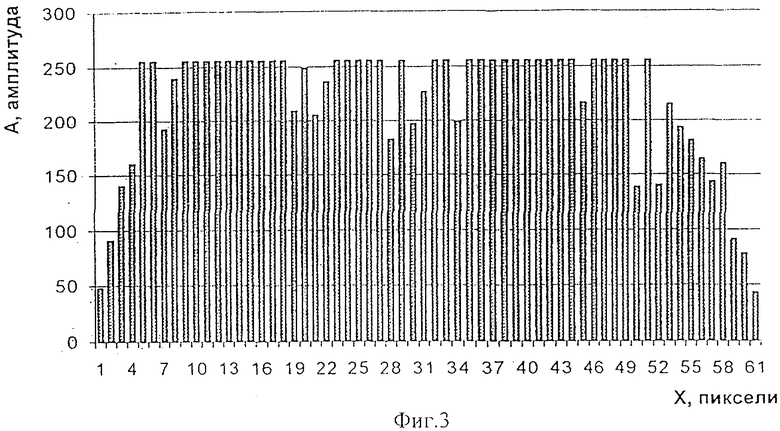
на фиг.3 - гистограмма распределения интенсивности излучения в зоне действия блика;
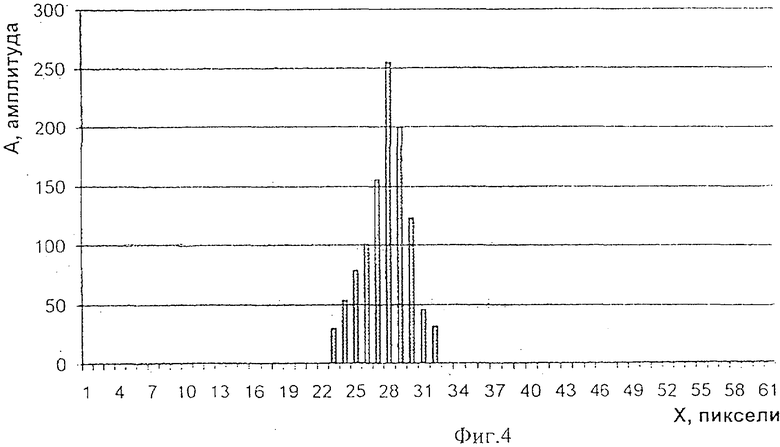
на фиг.4 - гистограмма распределения интенсивности излучения в зоне отсутствия блика;
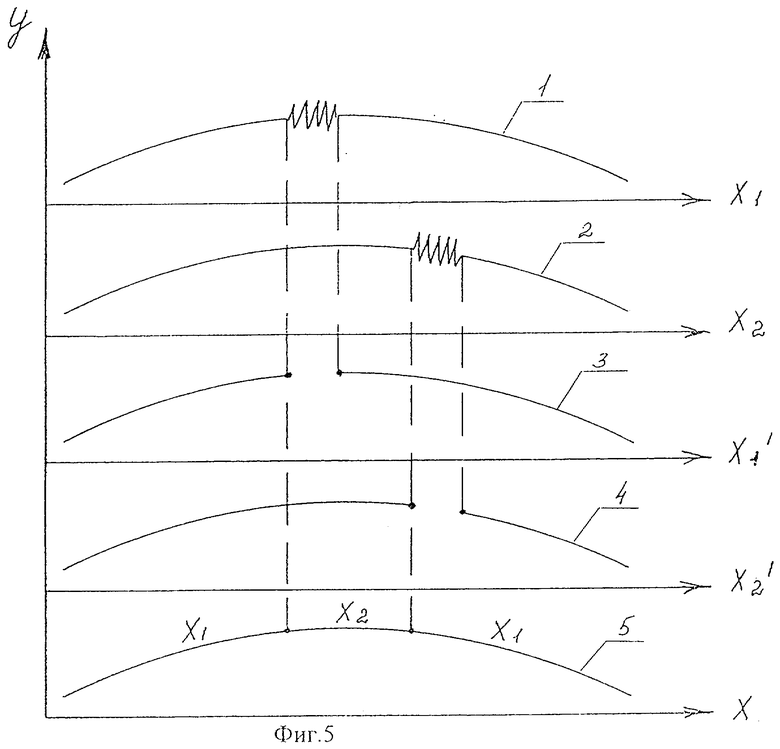
на фиг.5 - алгоритм устранения влияния бликов на результаты измерения.
В качестве объекта измерения выбрана компрессорная лопатка газотурбинного двигателя. Продольная ось лопатки совмещена с осью Z координатной системы XYZ.
Реализация способа рассмотрена на примере измерения детали сложной формы - компрессорной лопатки газотурбинного двигателя, при этом светоизлучающие системы выполнены в виде генераторов световых линий. Генераторы расположены попарно и симметрично с противоположных сторон (спинки и корыта) лопатки.
Устройство содержит генераторы 1, 2, световых линий, расположенные со стороны спинки, и дополнительные генераторы 3, 4 световых линий, расположенные со стороны корыта лопатки 5, действующие в одной плоскости Q, перпендикулярной оси Z. Оптически связанный с генераторами 1, 2 фотоприемник 6 с объективом 7 и оптически связанный с генераторами 3, 4 второй фотоприемник 8 с объективом 9, при этом фотоприемники 6, 8 расположены под острым углом α к плоскости излучения генераторов 1, 2, 3, 4 (0<α>90°). Вычислительный блок 10, вход которого подключен к выходам фотоприемников 6, 8, дисплей 11 и блок 12 коммутации, подключенные к разным выходам вычислительного блока 10. Блок 12 коммутации подключен выходом к каждому генератору 1, 2, 3, 4.
Генераторы 1, 2, 3, 4, фотоприемники 6, 8 и лопатка 5 закреплены на платформе (на чертежах не показана). Лопатка 5 имеет возможность перемещения вдоль оси Z и относительно платформы.
Расположение фотоприемников 6, 8 под острым углом α к плоскости излучения генераторов 1-4 позволяет упростить конструкцию устройства.
Светоизлучающие системы выполнены в виде генераторов, так как генераторы выпускаются серийно, имеют малые габариты и достаточную мощность, однако светоизлучающие системы могут состоять из лазеров и цилиндрических линз и других типов светоизлучающих источников.
Работа устройства и способ измерения осуществляются следующим образом.
Устанавливают на платформе (на чертеже не показана) лопатку 5 измеряемыми поверхностями - спинкой и корытом - к генераторам 1, 2 и 3, 4, симметрично расположенным со стороны спинки (генераторы 1, 2) и со стороны корыта (генераторы 3, 4), по два с каждой стороны, фотоприемники 6, 8 с объективами 7, 9 соответственно. Оптические оси генераторов 1, 2 расположены друг к другу под углом 35° (на чертеже не обозначен). Оптические оси генераторов 3, 4 расположены друг к другу под углом 39° (на чертеже не обозначен).
При включении устройства лучи генераторов 1-4 поочередно формируют совпадающие на поверхности объекта, спинке и корыте лопатки 5 световые линии в одной плоскости Q, перпендикулярной оси Z, как со стороны спинки, так и со стороны корыта лопатки 7, на заданном сечении, при этом два генератора 1, 2 поочередно формируют световые линии на спинке лопатки 5 и два генератора 3, 4 поочередно формируют световые линии на корыте лопатки 5. Изображение световых линий повторяет рельеф измеряемого сечения поверхности лопатки 5. Световые линии попадают на объективы 7, 9, которые формируют изображение на матрицах фотоприемников 6, 8. Преобразованное в электрический сигнал изображение передается в вычислительный блок 10, где осуществляется определение координат точек сечения профиля и совмещение изображений спинки и корыта. На дисплее 11 осуществляется индикация изображения измеряемого сечения и результатов измерения координат точек сечения лопатки 5.
В вычислительном блоке 10 реализуется алгоритм (см. фиг.5, где у, х - координаты объекта): “выявляют, исключают, замещают”, позволяющий получить заданный результат. При появлении на изображении профиля сечения зоны искажения под действием блика в вычислительном блоке 4 производится анализ и определение зоны искажения путем сравнения ширины поперечного сечения линии (фиг.3). Так как блики возникают на изображениях на разных участках сечения (см. фиг.3, кривые 1, 2), поочередно выключая генераторы 1, (2), 3,(4) через блок коммутации 12, поочередно удаляя зоны искажения (см. фиг,5, кривые 3, 4) и замещая зону искажения неискаженным участком изображения линии от другого генератора 2, (1), 4 (3), получаем компилированное (неискаженное) из двух изображений изображение линии профиля сечения лопатки (см. фиг.3, кривая 5).
Для измерения следующего сечения лопатки 5 ее перемещают в продольном направлении по платформе вдоль оси Z.
Если зоны искажений формируются на спинке, необходимо работать с генераторами, расположенными со стороны спинки, если зоны искажения формируются со стороны корыта, то необходимо работать с генераторами, расположенными со стороны корыта, т.е. генераторы работают в паре.
Объект измерения можно перемещать в любом направлении в зависимости от степени свободы выбранного объекта и выполнения требуемых измерений. Плоскость, в которой генерируют световые линии и формируют изображение световых линий, может быть наклонена к оси Z (продольной оси объекта) под углом, отличным от 90°, например от 87° до 93° в зависимости от геометрии объекта, однако угол 90° является оптимальным с точки зрения повышения достоверности результата измерения. При выходе за указанный диапазон значительно уменьшается точность измерения.
Средства, входящие в устройство (генераторы, фотоприемники и т.д.), известны из уровня техники, поэтому их конструктивное выполнение не раскрыто. Так, в качестве генераторов использованы лазерные генераторы линий ГЛ-35-3,5 ВА, фотоприемника - цифровая камера VS-CTT-205-2001, персональный компьютер P-III-360 с дисплеем. Коммутация лазеров осуществлялась вручную.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ ОБЪЕКТА | 2003 |
|
RU2256149C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ПОВЕРХНОСТИ ОБЪЕКТА СЛОЖНОЙ ФОРМЫ | 2005 |
|
RU2309379C2 |
| ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ НЕПРЯМОЛИНЕЙНОСТИ | 2010 |
|
RU2457434C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОВЕРХНОСТЕЙ СЛОЖНОПРОФИЛИРОВАННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2243503C2 |
| СИСТЕМА КОНТРОЛЯ СКОРОСТИ КОСМИЧЕСКИХ АППАРАТОВ ПРИ СБЛИЖЕНИИ | 2013 |
|
RU2547286C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ БЛИКУЮЩЕГО ОБЪЕКТА | 1983 |
|
SU1841110A1 |
| УСТРОЙСТВО ВИДЕНИЯ ОБЪЕКТА | 2006 |
|
RU2329526C1 |
| СПОСОБ ФУНКЦИОНАЛЬНОГО ПОДАВЛЕНИЯ ЛАЗЕРНЫХ СИСТЕМ ПОИСКА ПОГРУЖЕННЫХ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2388013C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2308676C2 |
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
Способ измерения формы объекта включает формирование на поверхности объекта с помощью светоизлучающей системы световой линии, лежащей в заданном сечении объекта, получение изображения световой линии, его обработку и определение координат профиля сечения объекта. При этом формируют совпадающие на поверхности световые линии поочередно с помощью двух светоизлучающих систем, освещающих поверхность в заданном сечении объекта под разными углами в каждой ее точке, получают изображения световых линий, на каждом из них выявляют неискаженные участки, из изображений указанных участков компилируют результирующее изображение, по которому осуществляют определение координат профиля сечения объекта. Устройство для измерения формы объекта содержит светоизлучающую систему, оптически связанную с фотоприемником, и вычислительный блок. Также содержит одну дополнительную светоизлучающую систему, оптически связанную с фотоприемником, и блок коммутации, подключенный входом к вычислительному блоку, а выходом - к каждой светоизлучающей системе, оптические оси светоизлучающих систем размещены в одной плоскости и расположены друг к другу под углом, равным 5-80°. Технический результат - повышение точности измерения путем исключения влияния зоны искажения на результаты измерений. 2 н. и 11 з.п. ф-лы, 5 ил.
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| Устройство контроля формы изделий | 1983 |
|
SU1211602A1 |
| Способ бесконтактного измерения поверхности стопы и голени | 1987 |
|
SU1480799A1 |
| US 5666204 А, 09.09.1997. | |||

