1
Изобретение относится к грузоподъемным средствам, в частности к устройствам для подъема и транспортировки конверторов.
Известные устройства для подъема и транспортировки конверторов содержат опорные тележки с установленными на них гидродомкратами, платформу со стойками, гидропривод с датчиками положения, распределительную аппаратуру и систему упра1вления со сравнивающим релейным блоком и блоками обратной связи.
Однако известные устройства для подъема и транспортировки конверторов малонадежны в работе и сложны.
Цель изобретения - новышение надежности устройства в работе и устранение конструктиВНых недостатков.
Для этого блок обратной связи выполнен в виде линейных датчиков положения, механически соединенных с плунжерами гидродомКратов и гидравлически связанных со сравнивающим блоком, входы которого подключены к датчикам положения, а выходы к распределительной аппаратуре гидропривода через реле задержки времени.
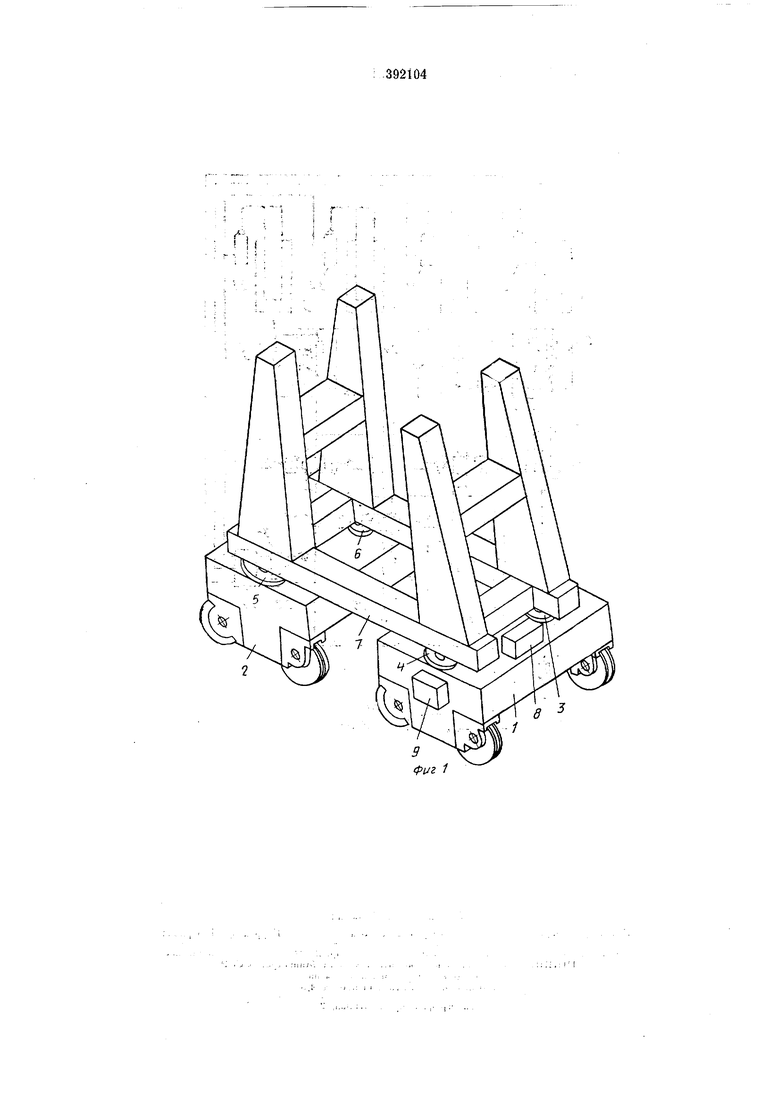
На фиг. 1 схематически изображено описываемое устройство; на фиг. 2 - гидропривод.
Устройство для подъема и транспортировки конверторов содержит опорные тележки 1 11 2 с гидродомкратами 3-6, платформу 7 с
опорными стойками, гидропривод 8, установленный па одной из опорных тележек, и систему управления 9.
Гидравлическая схема гидропривода с системой управления содержит резервуар 10, насос //, двухпозициоиный распределитель 12, делители потока 13 и 14, трехпозиционные распределители 15-17, обратные клапаны 18-26, дроссели 27-29 с регулятором, линейные датчики положения 30-33, сравнивающий блок 34, гидравлически связанный с датчиками положения и реле 55-37 задержки времени, связанными с электромагнитными распределителями 12, 15, 16 и 17 (связь с электромагнитами распределителей не показана).
Работает устройство следующим образом.
Ири подъеме грузовой платформы рабочая жидкость из резервуара 10 насосом 11 подается через распределитель 12 к делителю потока 13, где происходит ее разделение на два равиых потока. Один из этих нотоков через обратные клапаны 18 и 26 поступает в гидродомкраты 5 и 6. Другой поток поступает к делителю потока 14, где происходит его разделение еще на два равных потока, один из которых через обратные клапаны 21 и 22 поступает в гидродомкрат 3, а другой через обратные клапаны 23 и 24 Е гидродомкрат 4. Таким образом осуществляется объемная гидравлнческая синхронизация при подъеме плунжеров гидродомкратов, причем гидродомкраты 5 и не требуют взаимной синхронизации, так как гидравлический балансир между ними обеспечивает их взаимное положение, идентичное взаимному положению плунжеров гидродомкратов. При опускании грузовой платфор1мы с конвертором насос 11 не работает.
Если распределители 12, 15, 16 и 17 включены на СЛИВ жидкости из гидродомкратов в резервуар 10, то рабочая жидкость из гидродомкрата 3 через дроссель 27 и распределитель 15 Сливается в резервуар. Рабочая жидкость из гидродомкрата 4 сливается в резервуар через дроссель 28, распределитель 16, обратный клапан 19 и распределитель 12. Ра- бочая жидкость из гидродомкратов 5 и (J через дроссель 29 и раснределитель 17 также сливается в резервуар. Вытеснение жидкости из гидродомкратов происходит под собственным весом конвертера и платформы. Равная скорость опускания плунжеров всех гидродомкратов обеспечивается соответствующей настройкой дросселей 27-29.
Как при подъеме, так и нри опускания сравнивающим блоком 34 постоянно осуществляется сравнение трех сигналов, поступающих от датчиков 30-33.
Пока разиость положений трех условных опор, а следовательно, и датчиков ниже онределенного заданного значения, на выходе сравнивающего блока отсутствуют сигналы, нри этом идет обычный режим нодъема или опускания конвертора. По достижении величины рассогласования между какими-либо из сравниваемых трех условий опор определенного заданного значения разность соответствующих сигналов на входе сравнивающего блока 34 достигает порогового значения, при котором на выходе сравнивающего устройства возникает сигнал, соответствующий переключению распределителей 12, 15, 16, 17 в режим устранения рассогласования. Переключение распределителей происходит через реле 35-37 задержки времени, каждое из которых ири лостуилеиии на него сигнала со сравнивающего блока 34 выключает питание всех электромагнитов распределителей 15 и 16 и включает лищь те электромагниты, которые переключают соответствующие распределители-на подачу жидкости в наиболее отставщий гидродомкрат при подъеме или на сброс жидкости в резервуар из наиболее отставщего гидродомкрата при опускании на время, необходимое для выравнивания положения платформы, после чего этим же реле включается прежний режим подъема либо опускания. Величина задержки времени устанавливается при настройке соответствующего реле. Так, например, если плунжер гидродомкрата 5 при подъеме платформы отстал на определенную заданную величину , от плунжера
гидродомкрата или среднего значения положений плунжеров гидродомкратов 5 и 5, то сравнивающий блок 34 через реле 35 задержки времени включает электромагниты распределителей 12 и 16 таким образом, что насос // через обратный клапан 20 и распределитель 16 подает л идкость в гидродомкрат 3, причем электромагниты будут включены на величину задержки времени, определяемую
заданной величиной рассогласования и производительностью насоса.
По истечении этого времени реле задержки времени отключит эти электромагниты, тем самым включая прежний режим общего иодъема илатформы.
В случае отставания плунжера гидродомкрата 3 от остальных при опускании платформы на определенную заданную величину, процесс выравнивания произойдет путем отключения прежде включенных электромагнитов распределителей 15 и 16 и включением соответствующего магнита распределителя 15, обеспечивающего переключепие распределителя па сброс жидкости из гидродомкрата 3
в резервуар, через дроссель 27 на время пастройки реле задержки времени, после чего включается прежний режим общего опускания нлатформы. Выравнивается платформа гидродомкратом 4 с помощью распределителей 12 и 16 при подъеме и распределителя 15 при опускании.
Выравнивание платформы гидродомкратами 5 и 6 при подъеме осуществляется включением распределителей 12 и 17, которые сообщают рабочие полости обоих гидродомкратов с насосом //, а при опускании платформы включением распределителя 17 на слив жидкости из рабочих полостей обоих гидродомкратов в резервуар. Распределитель 12, включаемый при выравнивании в режиме подъема, разобщает при этом -насос // и делитель потока 13.
Предмет изобретения
Устройство для подъема и транспортировки копверторов, содерл ащее опорные тележки с установленными на них гидродом-кратами,
платформу со стойками, гидропривод с дат чиками положения, распределительную аппаратуру и систему управления со сравнивающим релейным блоком и блоком обратной связи, отличающееся тем, что, с целью повыщения надежности устройства в работе и упрощения его конструкции, блок обратной связи выполнен в виде линейных датчиков положения, механически соединенных с плунжерами гидродомкратов и гидравлически связаиных со сравнивающим блоком, входы которого -подключены к датчикам положения, а выходы к распределительной аппаратуре гидропривода через реле задержки времени.
5/7
| название | год | авторы | номер документа |
|---|---|---|---|
| Объединенный гидропривод опрокидывающего механизма и усилителя рулевого управления автомобиля-самосвала | 1984 |
|
SU1204420A1 |
| Объемный гидропривод опрокидывающего механизма и усилителя рулевого управления автомобиля-самосвала | 1988 |
|
SU1512828A1 |
| Объединенный гидропривод опрокидывающего механизма и усилителя рулевого управления саморазгружающего транспортного средства | 1990 |
|
SU1729877A1 |
| Устройство для загрузки лома в конвертер | 1978 |
|
SU718482A1 |
| ГИДРОПРИВОД ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1992 |
|
RU2049937C1 |
| ГИДРОПРИВОД ТРАНСПОРТНОЙ МАШИНЫ-САМОСВАЛА | 1994 |
|
RU2079734C1 |
| Объединненый гидропривод опрокидывающего механизма и усилителя рулевого управления | 1976 |
|
SU605045A1 |
| УСТРОЙСТВО ДЛЯ ДЕГАЗАЦИИ ЖИДКОСТИ ГИДРОСИСТЕМЫ | 1990 |
|
RU2014524C1 |
| Гидравлический пресс | 1977 |
|
SU737242A1 |
| Гидравлический привод затворов | 2023 |
|
RU2840451C2 |
2г
tfk1
/
37 J4
Г
Чь
//
Н
Л7
0//;
