Изобретение относится к области контроля и диагностирования радиоэлектронных устройств и может быть использовано при поиске отказавшего элемента в радиоэлектронном устройстве.
Уровень техники
Известно устройство автоматизированной системы контроля, состоящее из коммутатора, преобразователя «аналог - код», блоков согласования, запоминающего блока, преобразователя параллельного кода в последовательный, дешифратора, электронных ключей, цифровой вычислительной машины, блока ввода - вывода, блока синхронизации, блока сопряжения, оптических приемопередатчиков, волоконно-оптической линии связи, ЭВМ, используемое для контроля радиоэлектронного оборудования сложных объектов (см. а.с. СССР №2015622, Н04В 17).
Недостатком этого устройства является сложность конструкции, повышенные временные и экономические затраты на проведение контроля вследствие неоптимизированного алгоритма поиска отказов.
Известно устройство автоматизированной системы контроля, реализующее последовательный поиск отказов с использованием пороговых датчиков, состоящее из устройства логической обработки, схемы самоконтроля, генератора имитационных сигналов, индикаторного устройства, коммутатора, источника опорного напряжения (см. книгу «Автоматический контроль и техническая диагностика», стр.34-36, автор Сердаков А.С.).
Недостатком этого устройства является ограниченные возможности его применения при сложных взаимных связях функциональных элементов объекта контроля.
Наиболее близким к заявляемому изобретению является устройство, реализующее комбинационный метод поиска отказов, состоящее из пороговых датчиков, соединенных с дешифратором кодов состояни,й и схемы индикации, на которую поступают сигналы с выхода дешифраторов кодов состояний. Это устройство реализует метод поиска отказов, заключающийся в том, что каждая контрольная точка соответствует единственному выходу соответствующего элемента объекта контроля. В этих контрольных точках установлены пороговые датчики. На входы дешифратора кодов состояний подаются сигналы от пороговых датчиков, имеющие высокий потенциал, если контролируемый параметр в допуске, и низкий, если контролируемый параметр за пределами поля допуска. Дешифратор реализует совокупность переключательных функций, представляющую собой матрицу допустимых параметров, столбцы которой соответствуют элементам объекта контроля (ОК), а строки - контрольным точкам. Каждый столбец этой матрицы соответствует отказу одного из элементов объекта. Сигналы, появляющиеся на выходе дешифратора кода состояний, фиксируют появление того или иного состояния объекта и используются в схеме индикации для указания условного наименования или номера отказавшего функционального элемента (см. книгу «Автоматический контроль и техническая диагностика», стр.39-42, автор Сердаков А.С.).
Недостатком данного устройства является то, что способ который оно реализует не гарантирует оптимального набора проверок, необходимых для выявления отказавшего элемента, вследствие чего увеличиваются временные и экономические затраты на проведение контроля.
Раскрытие изобретения
Технический результат, который может быть достигнут с помощью предлагаемого изобретения, сводится к уменьшению временных и экономических затрат на проведение контроля и поиска неисправности.
Технический результат достигается с помощью устройства для автоматизированного контроля и поиска неисправностей в радиоэлектронной аппаратуре, состоящего из пороговых датчиков d.1...d.k, встроенных в объект контроля, сигналы с которых, имеющие высокий потенциал, поступают напрямую на дешифратор кодов состояний, сигналы, имеющие низкий потенциал, поступают на дешифратор кодов состояний через логические элементы НЕ, дешифратор кодов состояний связан m.1...m.k выходами с входами схемы индикации отказавшего элемента, при этом оно дополнительно содержит пульт управления, предназначенный для ввода матрицы допустимых параметров, схему индикации номеров пороговых датчиков, блок формирования оптимизированной матрицы допустимых параметров, состоящий из блока попарного сравнения столбцов, блока логических преобразований, предназначенного для нахождения логической суммы номеров строк матрицы с различными исходами соответствующих тестов, определения логических произведений выражений, полученных для всех пар столбцов, таких, что один из столбцов каждой пары общий, b.1...b.n блоков формирования множеств логических произведений, блока сравнения и блока выбора минимального набора, предназначенного для выбора минимального набора проверок, необходимых для однозначного выявления отказавшего элемента, при этом пульт управления соединен k.1...k.n выходами с входами блока попарного сравнения столбцов, который k.1...k.n выходами соединен с входами блока логических преобразований, каждый из k.1...k.n выходов которого соединен с входом соответствующего b.1...b.n блока формирования множеств логических произведений, выход каждого из которых соединен с соответствующим k.1...k.n входом блока сравнения, выход которого соединен с входом блоком выбора минимального набора, выходы которого, являющиеся выходами блока формирования оптимизированной матрицы допустимых параметров, соединены со схемой индикации номеров пороговых датчиков, другие m.1...m.k выходы блока формирования оптимизированной матрицы допустимых параметров соединены с входами дешифратора кодов состояний.
Краткое описание чертежей
На фиг.1 дано устройство для автоматизированного контроля и поиска неисправностей в радиоэлектронном устройстве - функциональная схема.
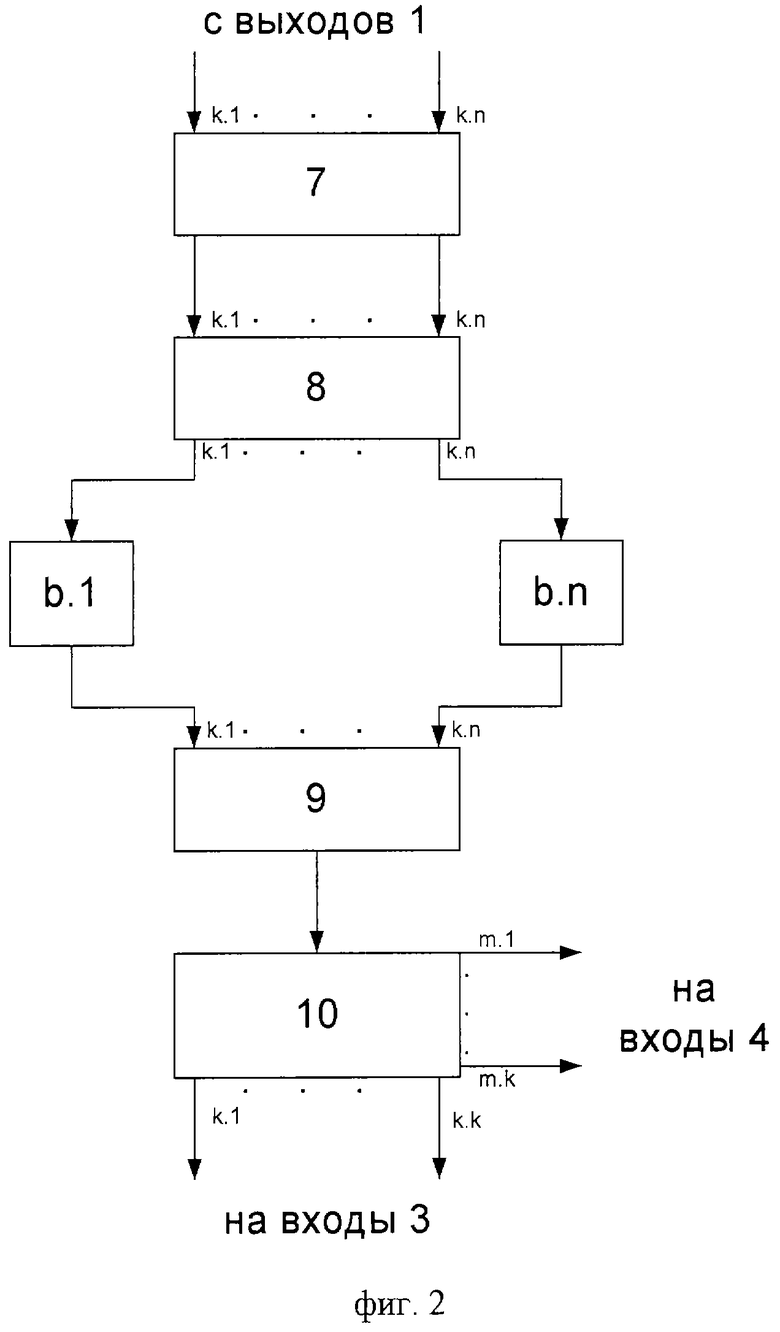
На фиг.2 дан блок формирования матрицы допустимых значений - функциональная схема.
Осуществление изобретения
Устройство для автоматизированного контроля и поиска неисправностей в радиоэлектронной аппаратуре состоит из пульта управления 1, связанного k.1...k.n выходами с блоком 2 формирования оптимизированной матрицы допустимых параметров, который связан k.1...k.k выходами со схемой 3 индикации номеров пороговых датчиков, а m.1...m.k выходами с дешифратором кодов состояний 4, пороговых датчиков d.1...d.k, встроенных в объект контроля, которые могут соединятся с дешифратором кодов состояний 4 напрямую или через логические элементы «НЕ» j.1...j.k, а дешифратор кодов состояний 4 связан m.1...m.k выходами со схемой 6 индикации отказавшего элемента (фиг.1), при этом блок 2 формирования оптимизированной матрицы допустимых параметров состоит из блока 7 попарного сравнения столбцов, связанного k.1...k.n выходами с блоком 8 логических преобразований, каждый из k.1...k.n выходов которого связан с соответствующим b.1...b.n блоком формирования множеств, каждый из которых своим выходом связан с блоком 9 сравнения, который своим выходом связан с блоком 10 выбора минимального набора, который своими k.1...k.k выходами связан со схемой 3 индикации номеров пороговых датчиков, а другими m.1...m.k выходами - с дешифратором кодов состояний 4 (фиг.2).
Устройство для автоматизированного контроля и поиска неисправностей в радиоэлектронной аппаратуре работает следующим образом.
Оператор с пульта управления 1 вводит матрицу допустимых параметров, столбцы которой соответствуют элементам объекта контроля (ОК), а строки - проверкам, контроль которых возможен. На пересечении i-ой строки (i=1...t где, t - число проверок) и j-го столбца (j=l...n, где n - число элементов ОК) стоит «1», если результат i-ой проверки j-ого параметра «годен» и «0» в противном случае. Столбцы этой матрицы с k.1...k.n выходов пульта управления 1 поступают на вход блока 7 попарного сравнения столбцов, в котором для каждой пары столбцов определяются все строки с различными исходами соответствующих тестов. Номера этих строк с k.1...k.n выходов блока 7 попарного сравнения столбцов поступают на соответствующие входы блока 8 логических преобразований, где полученные номера строк рассматривают как логические переменные, соединяют знаком логической суммы (∨), затем определяют логические произведения (∧) выражений, полученных для всех пар столбцов, таких, что один из столбцов каждой пары общий. После раскрытия скобок выражения упрощают по правилам булевой алгебры:
X∨X=X;
Х∧Х=Х;
Х∨Х∧Y=Х;
X∧(X∨Y)=X.
Получившиеся выражения с k.l...k.n выходов блока 8 логических преобразований поступают на входы соответствующих b.l...b.n блоков формирования множеств, в которых для каждого из элементов формируют множества, состоящие из полученных логических произведений. Получившиеся множества с выходов каждого из b.l...b.n блоков формирования множеств поступают на k.l...k.n входы блока 9 сравнения, где каждый элемент из этих множеств проверяется на наличие аналогичного в других множествах. Одинаковые для всех множеств наборы проверок с выхода блока 9 сравнения поступают на вход блока 10 выбора минимального набора, в котором осуществляется выбор минимального по затратам, либо по количеству проверок набор проверок, необходимый для однозначного выявления отказавшего элемента и на основании этого выбора строится оптимизированная матрица допустимых параметров, которая поступает с k.1...k.k выходов блока 10 выбора минимального набора на входы дешифратора кодов состояний 4. Одновременно с этим номера контрольных точек, в которых необходимо произвести проверки, отображаются на схеме индикации номеров пороговых датчиков 3. По этим результатам оператор встраивает d.1...d.k пороговые датчики только в тех контрольных точках, результаты контролируемых параметров в которых необходимы для выявления отказавшего элемента. На входы дешифратора кодов состояний 4 подаются сигналы от d.1...d.k пороговых датчиков, имеющие высокий потенциал, если контролируемый параметр в допуске, и низкий через j.1...j.k логические элементы «НЕ», если контролируемый параметр за пределами поля допуска, после чего дешифратор кодов состояний 4 реализует совокупность переключательных функций, представляющую собой оптимизированную матрицу допустимых параметров, полученную с выходов блока 2 формирования оптимизированной матрицы допустимых параметров. Каждый столбец этой матрицы соответствует отказу одного из элементов объекта контроля 5. Сигналы, появляющиеся на выходе дешифратора кода состояний 4, фиксируют появление того или иного состояния объекта и используются в схеме 6 индикации отказавшего элемента для указания условного наименования или номера отказавшего функционального элемента.
Работа предлагаемого устройства представлена на конкретном примере.
Оператор с пульта управления 1 вводит матрицу допустимых параметров (таблица 1):
Матрица допустимых параметров
Столбцы этой матрицы с k.1...k.4 выходов пульта управления 1 поступают на входы блока 7 попарного сравнения столбцов, в котором для каждой пары столбцов определяются все строки с различными исходами соответствующих тестов:
для 1-го и 2-го: 1-я и 5-я строки,
для 1-го и 3-го: 1-я, 2-я, 4-я, 5-я строки,
для 1-го и 4-го: 1-я, 2-я, 3-я, 4-я, 5-я строки,
для 2-го и 3-го: 2-я, 4-я строки,
для 2-го и 4-го: 2-я, 3-я, 4-я строки,
для 3-го и 4-го: 3-я строка.
Номера этих строк с k.1...k.4 выходов блока 7 попарного сравнения столбцов поступают на соответствующие входы блока 8 логических преобразований, где полученные номера строк рассматривают как логические переменные, соединяют знаком логической суммы (∨),
Э1Э2: t1∨t5.
Э1Э3: t1∨t2∨t4∨t5.
Э1Э4: t1∨t2∨t3∨t4∨t5.
Э2Э3: t2∨t4.
Э2Э4: t2∨t3∨t4.
Э3Э4: t3.
Затем определяются логические произведения (∧) выражений, полученных для всех пар столбцов, таких, что один из столбцов каждой пары общий.
Для первого столбца (Э1): (t1∨t5)∧(t1∨t2∨t4∨t5)∧(t1∨t2∨t3∨t4∨t5).
Для второго столбца (Э2): (t1∨t5)∧(t2∨t4)∨(t2∨t3∨t4).
Для третьего столбца (Э3): (t1∨t2∨t4∨t5)∧(t2∨t4)∧t3).
Для четвертого столбца (Э4): (t1∨t2∨t3∨t4∨t5)∧(t2∨t3∨t4)∧t3.
После раскрытия скобок выражения упрощают по правилам булевой алгебры. Получившиеся выражения с k.1...k.4 выходов блока 8 логических преобразований поступают на входы соответствующих b.1...b.4 блоков формирования множеств, в которых для каждого из элементов формируют множества, состоящие из полученных логических произведений:
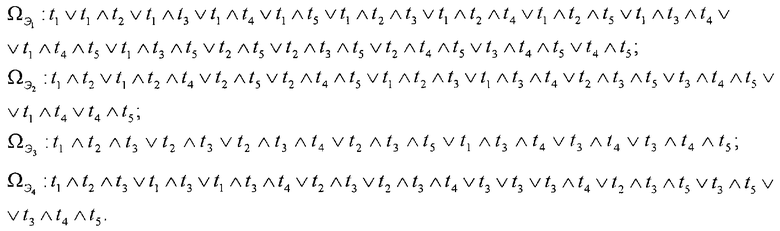
Получившиеся множества с выходов каждого из b.1...b.4 блоков формирования множеств поступают на k.1...k.4 входы блока 9 сравнения, где каждый элемент из этих множеств проверяется на наличие аналогичного в других множествах. Одинаковые для всех множеств наборы проверок: t1∧t2∧t3∨t1∧t3∧t4∨t2∧t3∧t5 с выхода блока 9 сравнения поступают на вход блока 10 выбора минимального набора, в котором осуществляется выбор минимального по затратам, либо по количеству проверок набор проверок, необходимый для однозначного выявления отказавшего элемента, и на основании этого выбора строится оптимизированная матрица допустимых параметров (таблица 2):
Оптимизированная матрица допустимых параметров
строки которой поступают с k.l...k.3 выходов блока 10 выбора минимального набора на входы дешифратора кодов состояний 4. Одновременно с этим номера контрольных точек (2-я, 3-я, 5-я), в которых необходимо произвести проверки, поступают с k.1...k.3 выходов на схему индикации номеров пороговых датчиков 3, где они отображаются.
По этим результатам оператор встраивает d.1...d3 пороговые датчики только в тех контрольных точках, результаты контролируемых параметров в которых необходимы для выявления отказавшего элемента (2-я, 3-я, 5-я). На входы дешифратора кодов состояний 4 подаются сигналы от d.1...d3 пороговых датчиков, имеющие высокий потенциал, если контролируемый параметр в допуске, и низкий через j.1...j.3 логические элементы «НЕ», если контролируемый параметр за пределами поля допуска, после чего дешифратор кодов состояний 4 реализует совокупность переключательных функций представляющую собой оптимизированную матрицу допустимых параметров (таблица 2), полученную с выходов блока 2 формирования оптимизированной матрицы допустимых параметров. Каждый столбец этой матрицы соответствует отказу одного из элементов объекта контроля 5. Сигналы, появляющиеся на выходе дешифратора кода состояний 4, фиксируют появление того или иного состояния объекта и используются в схеме 6 индикации отказавшего элемента для указания условного наименования или номера отказавшего функционального элемента.
Предлагаемое изобретение позволяет:
- сократить число встроенных пороговых датчиков, необходимых для осуществления контроля и поиска неисправности;
- сократить временные затраты на проведение контроля;
- сократить экономические затраты на проведение контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СИСТЕМ УПРАВЛЕНИЯ | 1972 |
|
SU432465A1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ УСТАНОВОК | 2020 |
|
RU2828095C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО КОНТРОЛЯ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА К ОХРАНЯЕМЫМ ОБЪЕКТАМ | 2011 |
|
RU2451342C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОМЕХОУСТОЙЧИВОГО КОДА | 2016 |
|
RU2628191C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ | 1991 |
|
RU2030781C1 |
| Диагностическое устройство | 1980 |
|
SU902023A1 |
| СПОСОБ КРИПТОГРАФИЧЕСКОГО РЕКУРСИВНОГО 2-D КОНТРОЛЯ ЦЕЛОСТНОСТИ МЕТАДАННЫХ ФАЙЛОВ ЭЛЕКТРОННЫХ ДОКУМЕНТОВ | 2019 |
|
RU2726930C1 |
| АДАПТИВНЫЙ ДАТЧИК ДИСТАНЦИОННОГО КОНТРОЛЯ ИЗДЕЛИЙ | 2011 |
|
RU2453808C1 |
| АДАПТИВНЫЙ ДАТЧИК КОНТРОЛЯ ИЗДЕЛИЙ | 2011 |
|
RU2458322C1 |
| СПОСОБ ДЕПЕРСОНАЛИЗАЦИИ ПЕРСОНАЛЬНЫХ ДАННЫХ | 2012 |
|
RU2538913C2 |
Изобретение относится к области контроля и диагностирования радиоэлектронных устройств и может быть использовано при поиске отказавшего элемента в радиоэлектронном устройстве. Техническим результатом является уменьшение временных и экономических затрат на проведение контроля и поиска неисправности. Устройство содержит пульт управления, блок формирования матрицы допустимых значений, схему индикации номеров пороговых датчиков, дешифратор кодов состояний, пороговые датчики, встроенные в объект контроля, логические элементы «НЕ», схему индикации отказавшего элемента, при этом блок формирования матрицы допустимых значений состоит из блока попарного сравнения столбцов, блока логических преобразований, блоков формирования множеств, блока сравнения, блока выбора минимального набора. 2 ил., 1 табл.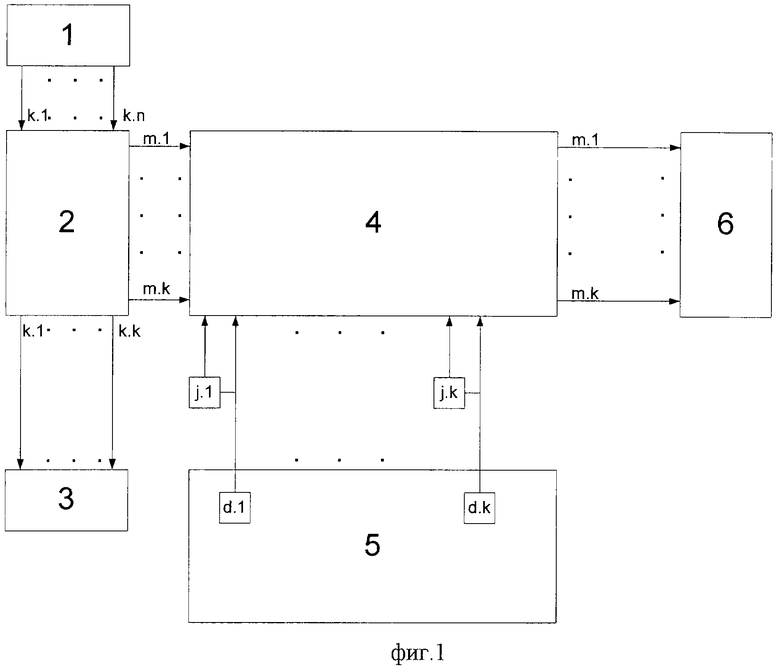
Устройство для автоматизированного контроля и поиска неисправностей в радиоэлектронной аппаратуре состоящее из пороговых датчиков d.1-d.k, встроенных в объект контроля, сигналы с которых, имеющие высокий потенциал, поступают напрямую на дешифратор кодов состояний, сигналы, имеющие низкий потенциал, поступают на дешифратор кодов состояний через логические элементы НЕ, дешифратор кодов состояний связан m.1-m.k выходами с входами схемы индикации отказавшего элемента, отличающееся тем, что оно дополнительно содержит пульт управления, предназначенный для ввода матрицы допустимых параметров, схему индикации номеров пороговых датчиков, блок формирования оптимизированной матрицы допустимых параметров, состоящий из блока попарного сравнения столбцов, блока логических преобразований, предназначенного для нахождения логической суммы номеров строк матрицы с различными исходами соответствующих тестов, определения логических произведений выражений, полученных для всех пар столбцов, таких, что один из столбцов каждой пары общий, b.1-b.n блоков формирования множеств логических произведений, блока сравнения и блока выбора минимального набора, предназначенного для выбора минимального набора проверок, необходимых для однозначного выявления отказавшего элемента, при этом пульт управления соединен k.1-k.n выходами с входами блока попарного сравнения столбцов, который k.1-k.n выходами соединен с входами блока логических преобразований, каждый из k.1-k.n выходов которого соединен с входом соответствующего b.1-b.n блока формирования множеств логических произведений, выход каждого из которых соединен с соответствующим k.1-k.n входом блока сравнения, выход которого соединен с входом блоком выбора минимального набора, выходы которого, являющиеся выходами блока формирования оптимизированной матрицы допустимых параметров, соединены со схемой индикации номеров пороговых датчиков, другие m.1-m.k выходы блока формирования оптимизированной матрицы допустимых параметров соединены с входами дешифратора кодов состояний.
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ | 1999 |
|
RU2156493C1 |
| АВТОМАТИЗИРОВАННОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО | 1996 |
|
RU2103717C1 |
| Устройство для контроля многоканального объекта | 1990 |
|
SU1751720A1 |
| Система оперативного контроля | 1978 |
|
SU706825A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

