Изобретение относится к обработке поверхности крупногабаритных объектов, преимущественно каменных или бетонных плит, а более конкретно к средствам для переноса изображений на плоскую поверхность объектов из твердых материалов.
Из уровня техники известна переносная гравировальная установка, содержащая размещенное в корпусе двухкоординатное сканирующее устройство с кареткой, на которой размещены средства для обработки поверхности объекта, выполненные в виде рабочего инструмента с приводом вращения, а также процессорный блок управления, первый и второй выходы которого подключены соответственно к исполнительному механизму перемещения каретки по одной координате и к исполнительному механизму перемещения каретки по другой координате, при этом третий выход процессорного блока управления соединен с приводом вращения рабочего инструмента, а корпус снабжен защитной обечайкой, прижимаемой в процессе работы вручную к обрабатываемой поверхности объекта (см. патент ЕР - В1 - №262131, 1991).
Недостаток этой гравировальной установки заключается в том, что, поскольку она, во-первых, является ручным инструментом, а во-вторых, обеспечивает только поэтапную обработку поверхности объекта большой площади, поэтому она не только не обеспечивает удобства в процессе эксплуатации, но и высокого качества гравировки.
Известна также гравировальная установка, взятая в качестве прототипа и содержащая двухкоординатное сканирующее устройство с кареткой, на которой размещены средства для обработки поверхности объекта из камня или бетона, выполненные либо в виде рабочего инструмента с исполнительным механизмом, либо в виде лазера, а также устройство управления в виде персонального компьютера, включающего микроконтроллер и подключенные к нему монитор, клавиатуру и блок считывания изображения, при этом первый и второй выходы микроконтроллера подключены соответственно к управляющему входу исполнительного механизма для перемещения по первой координате и к управляющему входу исполнительного механизма для перемещения по второй координате, а его третий выход - к управляющему входу исполнительного механизма рабочего инструмента или к лазеру. Двухкоординатное сканирующее устройство содержит прямоугольную раму, под которой устанавливается обрабатываемая поверхность объекта, первую пару параллельных между собой цилиндрических направляющих, которые жестко закреплены на раме, при этом на каждой направляющей первой пары направляющих установлен с возможностью продольного перемещения соответствующий ей ползун, а сами ползуны жестко соединены между собой второй парой параллельных между собой цилиндрических направляющих, оси которых перпендикулярны осям направляющих первой пары и лежат в плоскости, параллельной плоскости, проходящей через оси направляющих первой пары. На направляющих второй пары установлена, с возможностью продольного перемещения, каретка. Исполнительный механизм для перемещения по первой координате выполнен в виде винтового механизма, содержащего закрепленные на одной из направляющих первой пары неподвижно электродвигатель и с возможностью вращения вокруг своей оси, параллельной направляющим первой пары, винт с гайкой, при этом вал электродвигателя соединен через редуктор с винтом, а гайка (механический выход исполнительного механизма для перемещения по первой координате) жестко соединена с ползуном, расположенным на упомянутой выше направляющей. Управляющий вход упомянутого выше электродвигателя является управляющим входом исполнительного механизма для перемещения по первой координате. Исполнительный механизм для перемещения по второй координате также выполнен в виде винтового механизма, содержащего неподвижно закрепленный на одном из ползунов электродвигатель, закрепленный на ползунах с возможностью вращения вокруг собственной оси, параллельной второй паре направляющих, винт с гайкой, при этом вал электродвигателя соединен через редуктор с винтом, а гайка (механический выход исполнительного механизма для перемещения по второй координате) жестко соединена с кареткой. Управляющий вход электродвигателя исполнительного механизма для перемещения по второй координате является его управляющим входом (см. заявку GB - А - №2296778, 1995).
Недостаток прототипа заключается в том, что он не обеспечивает высоких эксплуатационных возможностей, поскольку относится к стационарным гравировальным установкам. Действительно, известная гравировальная установка не может быть использована для обработки поверхностей объектов, площадь которых превышает размеры рамы двухкоординатного сканирующего устройства. Кроме того, известная гравировальная установка не может быть использована в таких практически важных случаях, как обработка наклонных или вертикальных поверхностей стационарно установленных каменных или бетонных плит.
Настоящее изобретение направлено на решение технической задачи по расширению эксплуатационных возможностей гравировальной установки при сохранении высокого качества гравировки. Достигаемый при этом технический результат заключается в возможности производить обработку поверхностей объектов не только вне зависимости от того больше или меньше площадь их поверхности по сравнению с размерами в плане двухкоординатного сканирующего устройства, но и поверхностей объектов, расположенных горизонтально, наклонно или вертикально, в том числе и стационарно установленных.
Поставленная задача согласно первому варианту изобретения решена тем, что гравировальная установка, содержащая двухкоординатное сканирующее устройство и устройство управления, при этом двухкоординатное сканирующее устройство включает первую пару параллельных между собой цилиндрических направляющих, вторую пару параллельных между собой цилиндрических направляющих, оси которых перпендикулярны осям первой пары направляющих и расположены в плоскости, параллельной плоскости, проходящей через оси первой пары направляющих, на каждой направляющей первой пары направляющих установлен с возможностью продольного перемещения соответствующий ей ползун, каретку, на которой размещены средства для обработки поверхности объекта, исполнительный механизм для перемещения по первой координате, который размещен на одной из направляющих первой пары направляющих, а его выход связан с расположенным на той же направляющей ползуном, и исполнительный механизм для перемещения по второй координате, устройство управления выполнено в виде персонального компьютера, содержащего подключенные к микроконтроллеру монитор и клавиатуру, при этом первый и второй выходы микроконтроллера подключены соответственно к управляющему входу исполнительного механизма для перемещения по первой координате и к управляющему входу исполнительного механизма для перемещения по второй координате, а третий выход микроконтроллера соединен с управляющим входом средств для обработки поверхности объекта, согласна изобретению дополнительно содержит четыре вакуумные присоски, установленные с возможностью продольного перемещения и фиксаций в требуемом положении на соответствующей каждой из них державке удлиненной формы, два ползуна, установленные с возможностью продольного перемещения на соответствующей каждой из них направляющей второй пары направляющих, и две пары стержней, цилиндрические направляющие первой пары расположены с обеспечением контакта их с обрабатываемой поверхностью объекта по линии, являющейся образующей соответствующей каждой из них цилиндрической боковой поверхности, каждая державка удлиненной формы закреплена консольно и с возможностью поворота вокруг соответствующей ей оси, перпендикулярной плоскости, проходящей через оси первой пары направляющих, на соответствующем каждой из них концевом участке направляющих первой пары, при этом установленные на этих направляющих ползуны жестко соединены между собой первой парой стержней, оси которых лежат в плоскости, параллельной плоскости, проходящей через оси направляющих первой пары, концевые участки которых жестко соединены с соответствующим каждому из них и расположенным сверху концевым участком соответствующей ему направляющей второй пары с образованием прямоугольной рамы с противолежащими сторонами, расположенными на разных уровнях, на каждой направляющей второй пары установлен с возможностью продольного перемещения соответствующий ей ползун из числа дополнительно введенных, при этом дополнительно введенные ползуны жестко соединены между собой второй парой стержней, исполнительный механизм для перемещения по второй координате размещен на одной из направляющих второй пары направляющих, а его выход связан с расположенным на той же направляющей ползуном, каретка установлена на ортогонально относительно друг друга расположенных двух парах стержней с возможностью продольного относительно каждой пары стержней перемещения.
Кроме того, поставленная задача решена тем, что гравировальная установка дополнительно содержит блок считывания изображения, подключенный к микроконтроллеру.
Поставленная задача согласно второму варианту изобретения решена тем, что гравировальная установка, содержащая двухкоординатное сканирующее устройство и устройство управления, при этом двухкоординатное сканирующее устройство включает первую пару параллельных между собой цилиндрических направляющих, вторую пару параллельных между собой цилиндрических направляющих, оси которых перпендикулярны осям первой пары направляющих и расположены в плоскости, параллельной плоскости, проходящей через оси первой пары направляющих, на каждой направляющей первой пары направляющих установлен с возможностью продольного перемещения соответствующий ей ползун, при этом ползуны жестко соединены между собой двумя направляющими второй пары направляющих, на направляющих второй пары установлена с возможностью продольного перемещения каретка, на которой размещены средства для обработки поверхности объекта, исполнительный механизм для перемещения по первой координате размещен на одной из направляющих первой пары направляющих, а его выход связан с расположенным на той же направляющей ползуном, а исполнительный механизм для перемещения по второй координате размещен на ползунах, причем его выход связан с кареткой, устройство управления выполнено в виде персонального компьютера, содержащего подключенные к микроконтроллеру монитор и клавиатуру, при этом первый и второй выходы микроконтроллера подключены соответственно к управляющему входу исполнительного механизма для перемещения по первой координате и к управляющему входу исполнительного механизма для перемещения по второй координате, а третий выход микроконтроллера соединен с управляющим входом средств для обработки поверхности объекта, согласно изобретению дополнительно содержит четыре вакуумные присоски, установленные с возможностью продольного перемещения и фиксации в требуемом положении на соответствующей каждой из них державке удлиненной формы, и две поперечины, цилиндрические направляющие первой пары расположены с обеспечением контакта их с обрабатываемой поверхностью объекта по линии, являющейся образующей соответствующей каждой из них цилиндрической боковой поверхности, каждая державка удлиненной формы закреплена консольно и с возможностью поворота вокруг соответствующей ей оси, перпендикулярной плоскости, проходящей через оси первой пары направляющих, на соответствующем каждой из них концевою участке направляющих первой пары, концевые участки первой пары направляющих жестко соединены попарно между собой поперечинами, которые расположены сверху и перпендикулярно направляющим первой пары с образованием прямоугольной рамы с противолежащими сторонами, расположенными на разных уровнях.
Кроме того, поставленная задача решена тем, что гравировальная установка дополнительно содержит блок считывания изображения, подключенный к микроконтроллеру.
Преимущество предложенной гравировальной установки перед известными заключается в том, что за счет выполнения прямоугольной рамы двухкоординатного сканирующего устройства с противолежащими сторонами, расположенными на разных уровнях, а также со сторонами нижнего уровня в виде первой пары параллельных между собой цилиндрических направляющих, устанавливаемых на плоской обрабатываемой поверхности объекта с обеспечением контакта с ней каждой из направляющих по линии, являющейся образующей соответствующей каждой из них боковой поверхности, и снабженных закрепленными на их концевых участках (консольно и с возможностью поворота вокруг соответствующих осей, перпендикулярных плоскости, проходящей через оси первой пары направляющих) державками с вакуумными присосками, обеспечивается надежная фиксация двухкоординатного сканирующего устройства на горизонтальных, наклонных и вертикальных поверхностях объектов, площадь поверхности которых больше, меньше или равна площади прямоугольной рамы сканирующего устройства. Установка вакуумных присосок с возможностью их продольного перемещения и фиксации в требуемом положении на соответствующей каждой из них державже позволяет найти оптимальное положение для них, исходя из конкретной формы контура обрабатываемой поверхности, особенно в тех случаях, когда подлежащая обработке поверхность объекта по всему контуру или частично окружена так называемой "шубой", необработанными участками каменной плиты. Согласно первому варианту изобретения выполнение противолежащих сторон верхнего уровня прямоугольной рамы в виде второй пары параллельных между собой цилиндрических направляющих, оси которых перпендикулярны осям первой пара направляющих и расположены в плоскости, параллельной плоскости, проходящей через оси первой пары направляющих, позволяет разместить исполнительный механизм для перемещения по второй координате на одной из неподвижных направляющих второй пары направляющих, что повышает надежность работы установки по сравнению с известным из прототипа (второй вариант изобретения) размещением исполнительного механизма для перемещения по второй координате на движущихся элементах.
В дальнейшем изобретение поясняется конкретным примером, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения ожидаемого технического результата указанной выше совокупностью существенных признаков.
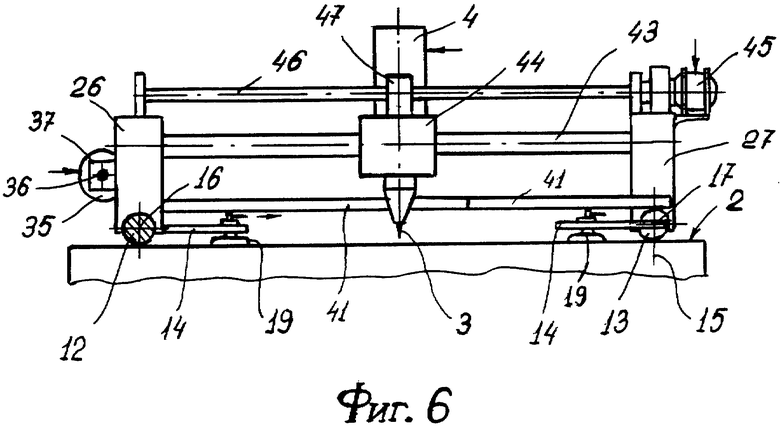
На фиг.1 схематично изображена принципиальная схема гравировальной установки согласно первому варианту изобретения, вид сверху двухкоординатного сканирующего устройства; на фиг.2. - разрез по А-А фиг.1; на фиг.3 - вариант выполнения направляющей первой пары, вид сбоку; на фиг.4 - разрез по Б-Б фиг.1; на фиг.5 - двухкоординатное сканирующее устройство согласно второму варианту изобретения; на фиг.6 - разрез по В-В фиг.5.
Гравировальная установка содержит двухкоординатное сканирующее устройство 1, размещаемое на плоской обрабатываемой поверхности 2 объекта из твердого материала, преимущественно камня или бетона, и снабженное средствами для обработки поверхности объекта, а именно: рабочим инструментом 3 с исполнительным механизмом 4 (электромагнитным, магнитострикционным, пневматическим, гидравлическим) или лазером (на чертеже не показан), а также устройством 5 управления, в качестве которого предпочтительно используется персональный компьютер, содержащий подключенные к микроконтроллеру 6 монитор 7, клавиатуру 8 и предпочтительно (как в прототипе) блок 9 считывания изображения. Первый и второй выходы микроконтроллера 6 подключены соответственно к управляющему входу исполнительного механизма 10 для перемещения по первой координате и к управляющему входу исполнительного механизма 11 для перемещения по второй координате, а третий выход микроконтроллера 6 соединен с управляющим входом средств для обработки поверхности 2 объекта, а именно, с управляющим входом исполнительного механизма 4 или с управляющим входом лазера или с управляющим входом других из числа известных средств для обработки твердых материалов.
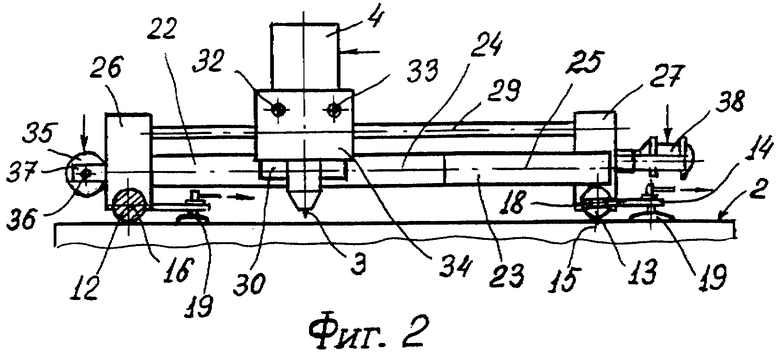
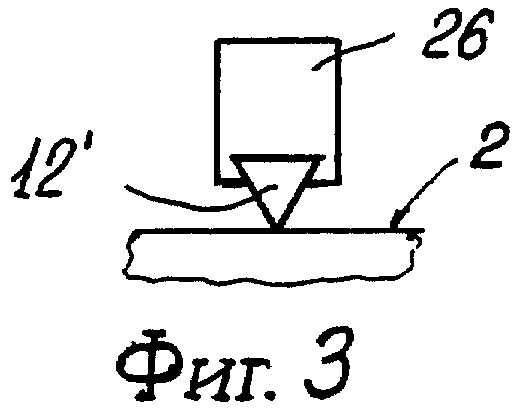
Двухкоординатное сканирующее устройство 1 (фиг.1 и 2) содержит первую пару параллельных между собой и предпочтительно одинаковых цилиндрических направляющих 12 и 13, устанавливаемых на плоской обрабатываемой поверхности 2 объекта с обеспечение контакта с ней каждой из направляющих 12 и 13 по линии, являющейся образующей соответствующей каждой из них цилиндрической боковой поверхности, а именно: выпуклой криволинейной (если направляющей ее цилиндрической боковой поверхности являются окружность, эллипс, овал, фиг.2) или многогранной (призматической), если направляющей ее цилиндрической боковой поверхности является многоугольник, например треугольник (фиг.3). В последнем случае в контакте с обрабатываемой поверхностью 2 объекта находится одно из ребер каждой из направляющих первой пары, на фиг.3 направляющая первой пары треугольного сечения обозначена позицией 12'. Каждая направляющая 12 и 13 снабжена двумя, предпочтительно одинаковыми, державками 14 удлиненной формы, которые консольно и с возможностью поворота вокруг соответствующих осей 15, перпендикулярных плоскости, проходящей через оси 16 и 17 (соответственно направляющих 12 и 13), закреплены на соответствующем каждой из них концевом участке направляющих 12 и 13, например, путем размещения закрепляемого конца каждой державки 14 в соответствующем ей пазу 18, который выполнен со стороны каждого торца направляющих 12 и 13.
Каждая державка 14 снабжена средствами для фиксации двухкоординатного сканирующего устройства 1 на обрабатываемой поверхности 2 объекта, выполненных в виде вакуумных присосок 19 (стрелками показаны линии откачки), установленных с возможностью продольного перемещения, например, за счет продольного паза 20, выполненного в каждой державке 14, и фиксации в требуемом положении, например, с помощью гайки 21, расположенной на каждой вакуумной присоске 19.
Согласно первому варианту изобретения (фиг.1 и 2) двухкоординатное сканирующее устройство 1 содержит вторую пару одинаковых параллельных между собой цилиндрических направляющих 22 и 23, оси соответственно 24 и 25 которых перпендикулярны осям 16 и 17 первой пары направляющих 12 и 13 и расположены в плоскости, параллельной плоскости, проходящей через оси 16 и 17. Концевые участки направляющих 12 и 13 первой пары жестко соединены с соответствующим каждому из них и расположенным сверху концевым участком одной из направляющих 22 и 23 второй пары с образованием прямоугольной рамы с противолежащими сторонами, расположенными на разных уровнях.
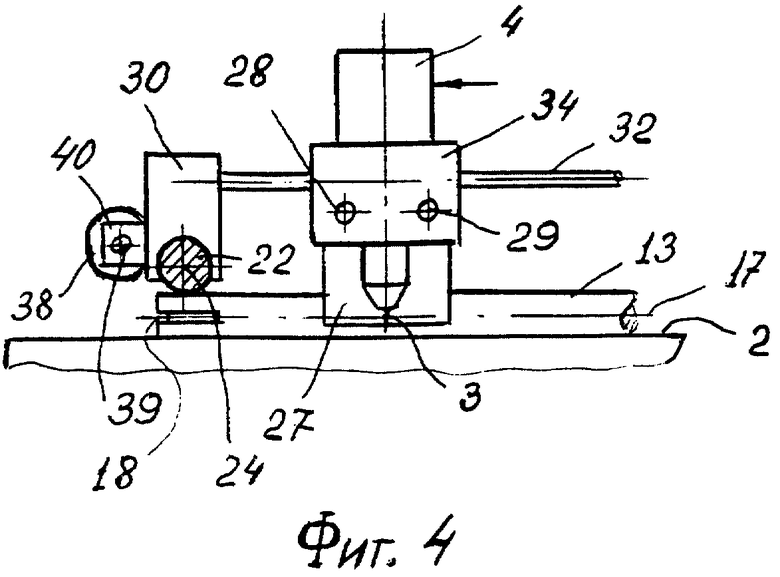
На каждой направляющей 12 и 13 первой пары установлен с возможностью продольного перемещения соответствующий ей ползун 26 и 27. Ползуны 26 и 27 жестко соединены между собой двумя стержнями 28 и 29, оси которых лежат в плоскости, параллельной плоскости, проходящей через оси 16 и 17. Аналогична на каждой направляющей 22 и 23 второй пары направляющих установлен, с возможностью продольного перемещения, соответствующий ей ползун 30 и 31. Ползуны 30 и 31 жестко соединены между собой двумя стержнями 32 и 33, оси которых также лежат в плоскости, параллельной плоскости, проходящей через оси 16 и 17. Рабочий инструмент 3 с исполнительным механизмом 4 (или лазер) закреплены на каретке 34, которая установлена на расположенных ортогонально относительно друг друга двух парах стержней 28, 29, 32 и 33 с возможностью продольного относительно каждой пары стержней 28, 29 и 32, 33 перемещения. Для этого в каретке 34 выполнены две пары параллельных между собой сквозных отверстий соответственно для пары стержней 28 и 29 и для другой пары стержней 32 и 33. Исполнительный механизм 10 для перемещения по первой координате выполнен аналогично тому, как описано в прототипе, а именно в виде винтового механизма (фиг.1), содержащего закрепленные на направляющей 12 (или 13) неподвижно электродвигатель 35 и винт 36 с гайкой 37 с возможностью вращения винта 36 вокруг своей оси, параллельной направляющей 12, при этом вал электродвигателя 35 соединен, например, через редуктор с винтом 36, а гайка 37 (выход механический исполнительного механизма 10) соединена жестко с ползуном 26. Управляющий вход электродвигателя 35 является управляющим входом исполнительного механизма 10 для перемещения по первой координате. Аналогично исполнительный механизм 11 для перемещения по второй координате выполнен в виде закрепленных на направляющей 22 (или 23) неподвижно электродвигателя 36 и с возможностью вращения вокруг своей оси, параллельной направляющей 22, винта 39 с гайкой 40, при этом вал электродвигателя 38 соединен, например, через редуктор с винтом 39, а гайка 40 (выход механический исполнительного механизма 11) жестко соединена с ползуном 30. Управляющий вход электродвигателя 38 является управляющим входом исполнительного механизма 11 для перемещения по второй координате. В принципе исполнительные механизмы 10 и 11 для перемещения по взаимно перпендикулярным координатам могут иметь и другое конструктивное выполнение, например, в виде шагового электродвигателя (см. авторское свидетельство SU - А - №383632, 1971) или в виде бесконечной ленты (тросика), закрепленной на двух шкивах, как описано в патенте RU - C1 - №2106918, 1998.
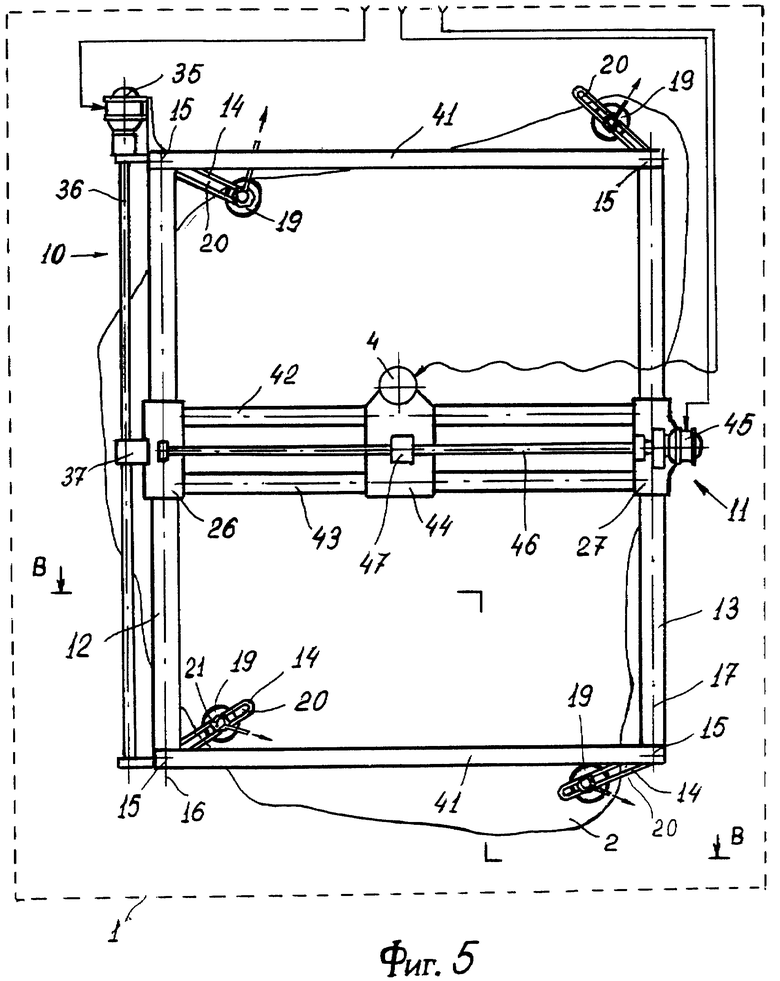
Согласно второму варианту изобретения (фиг.5 и 6) двухкоординатное сканирующее устройство 1 содержит две поперечины 41, при этом концевые участки направляющих 12 и 13 жестко и попарно соединены между собой поперечинами 41, которые расположены сверху и перпендикулярно направляющим 12 и 13 с образованием прямоугольной рамы с противолежащими сторонами, расположенными на разных уровнях. На направляющих 12 и 13 установлены соответственно ползуны 26 и 27, которые жестко соединены между собой двумя цилиндрическими направляющими 42 и 43, оси которых параллельны между собой, перпендикулярны осям 16 и 17 и лежат в плоскости, параллельной плоскости, проходящей через оси 16 и 17. На направляющих 42 и 43 установлена с возможностью продольного перемещения каретка 44, на которой закреплены рабочий инструмент 3 с исполнительным механизмом 4 (или лазер). Исполнительный механизм 10 для перемещения по первой координате выполнен и его элементы закреплены аналогично тому, как согласно первому варианту изобретения описано выше. Исполнительный механизм 11 для перемещения по второй координате также выполнен в виде винтового механизма (фиг.5), содержащего неподвижно закрепленный (как в прототипе) на ползуне 26 (или 27) электродвигатель 45, закрепленный на ползунах 26 и 27 с возможностью вращения вокруг собственной оси, параллельной направляющим 42 и 43, винт 46 с гайкой 47, при этом вал электродвигателя 45 соединен, например через редуктор, с винтом 46, а гайка 47 (выход механический исполнительного механизма 11) жестко соединена с кареткой 44. Микроконтроллер 6, как обычно, включает связанные посредством магистральной шины процессор, постоянное запоминающее устройство, оперативное запоминающее устройство и блок интерфейсов.
Гравировальная установка работает следующим образом. Сначала двухкоординатное сканирующее устройство 1 устанавливается на обрабатываемую поверхность 2 объекта, при этом за счет небольшой площади контакта направляющих 12 и 13 первой пары направляющих с поверхностью 2 объекта процесс установки двухкоординатного сканирующего устройства 1 упрощается, в том числе и за счет уменьшения как влияния неизбежных дефектов, находящихся на обрабатываемой поверхности 2, так и силы трения между направляющими 12 и 13 и материалом объекта. После установки направляющих 12 и 13 в требуемое положение на обрабатываемой поверхности 2 осуществляют фиксацию двухкоординатного сканирующего устройства 1 с помощью вакуумных присосок 19. Для этого, поворачивая каждую державку 14 вокруг соответствующей ей оси 15, а также перемещая вакуумную присоску 19 в продольное направлении относительно соответствующей ей державки 14, выбирают исходя из конкретной в плане формы обрабатываемой поверхности 2 объекта наилучшее место для размещения каждой вакуумной присоски 19 на обрабатываемой поверхности 2 объекта (фиг.1 и 5). При этом за счет размещения направляющих 22 и 23 второй пары (или поперечин 41) поверх направляющих 12 и 13 первой пары вакуумные присоски 19 могут располагаться также и между направляющими 12 и 13, а державки 14 могут поворачиваться на угол, существенно, превышающий 180°. После этого производят фиксацию положения каждой вакуумной присоски 19 на соответствующей ей державке 14 с помощью, например, гайки 21, а затем откачку воздуха из полостей вакуумных присосок 19 с помощью вакуумного насоса (на чертежах не показан), а после достижения требуемой для надежной фиксации двухкоординатного сканирующего устройства 1 величины разряжения в полостях вакуумных присосок 19 производят отключение вакуумного насоса от питающей сети.
Работа устройства 5 управления осуществляется так же, как и в прототипе, а именно с помощью блока 9 считывания изображения (выполненного, например в виде видеокамеры, фотоэлектрического сканера или цифрового фотоаппарата) осуществляют построчное преобразование двухмерного распределения оптической плотности или коэффициента отражения света в оригинале, например рисунке, фотографии, в электрические сигналы. Иными словами, при построчном сканировании поверхности оригинала каждой точке каждой строки оригинала ставится в соответствие электрический сигнал, величина которого (в цифровой форме) соответствует, в частности, оптической плотности в данной точке данной строки оригинала. Эти данные заносятся в оперативное запоминающее устройство микроконтроллера 6. Для повышения мобильности гравировальной установки блок 9 считывания изображения может отсутствовать. В этом случае для обеспечения работы устройства 5 управления могут быть использованы электронные копии воспроизводимых на поверхности 2 объекта оригиналов, записанные на любом из числа известных носителе: дискете, оптическом диске и т.п.
С помощью исполнительного механизма 10 для перемещения по первой координате, управляющий вход которого соединен с первым выходом микроконтроллера 6, осуществляется кадровая развертка закрепленных на каретке 34 (фиг.1 и 2) или каретке 44 (фиг.5 и 6) средств для обработки поверхности объекта. С помощью исполнительного механизма 11 для перемещения по второй координате, управляющий выход которого соединен со вторым выходом микроконтроллера 6, осуществляется строчная развертка средств для обработки поверхности объекта. Последовательно для каждой точки переносимого на обрабатываемую поверхность 2 оригинала и в соответствии, например, с величиной оптической плотности в соответствующей точке оригинала на третьем выходе микроконтроллера 6 формируется сигнал управления используемыми в каждом конкретной случае средствами для обработки поверхности объекта, например: величиной (силой) удара рабочего инструмента, или частотой ударов рабочего инструмента, или временем контакта рабочего инструмента с материалом объекта, или временем воздействия на материал объекта лазерного излучения. Таким образом, по сигналу, поступающему на управляющий вход исполнительного механизма 10 для перемещения по первой координате, каретка 34 или 44 переводится в положение, соответствующее первой строке развертываемого на обрабатываемой поверхности 2 изображения, соответствующего первой строке оригинала. По сигналу, поступающему на управляющий вход исполнительного механизма 11 для перемещения по второй координате, каретка 34 или 44 переводится в положение, соответствующее началу первой строки. Далее из оперативного запоминающего устройства микроконтроллера 6 осуществляется последовательное считывание электрических сигналов, соответствующих оптической плотности в точках, расположенных вдоль первой строки оригинала с последующим преобразованием их в сигналы управления средствами для обработки поверхности объекта. Синхронно со считыванием указанных выше сигналов и преобразованием их в сигналы управления на управляющий вход исполнительного механизма 11 для перемещения по второй координате поступают сигналы, обеспечивающие строчную развертку средств для обработки поверхности объекта по первой строке. По окончании развертка первой строки по соответствующему сигналу, поступающему со второго выхода микроконтроллера 6, каретка 34 или 44 возвращается в положение, соответствующее началу строк. На первом выходе микроконтроллера 6 формируется сигнал, по которому исполнительный механизм 10 для перемещения по первой координате осуществляет перемещение средств для обработки поверхности объекта в положение, соответствующее началу второй строки. Далее описанный выше процесс повторяется до полной развертки всего изображения. Здесь необходимо отметить, что в зависимости от фона (цвета каменной плиты) сигнал управления средствами для обработки поверхности объекта может быть прямо или обратно пропорционален электрическому сигналу, соответствующему оптической плотности в соответствующей точке оригинала, поскольку при обработке каменных плит из темного материала осуществляется очень часто не позитивная, а негативная обработка поверхности объекта.
Изобретение может быть использовано в различных предприятиях, занимающихся обработкой поверхности объектов из твердых материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЛАЗЕРНОГО ПОЛЯ УПРАВЛЕНИЯ ИНФОРМАЦИОННОГО КАНАЛА | 2003 |
|
RU2248534C1 |
| ГРАВИРОВАЛЬНЫЙ СТАНОК | 2009 |
|
RU2412061C1 |
| Устройство ввода движения | 1978 |
|
SU742658A1 |
| СПОСОБ КОНТРОЛЯ ПРОФИЛЯ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2263879C2 |
| ФРЕЗЕРНЫЙ СТАНОК | 2019 |
|
RU2705482C1 |
| Прибор для вычерчивания панорамной перспективы | 1985 |
|
SU1306736A1 |
| ДВУХКООРДИНАТНЫЙ МИКРОПОЗИЦИОНЕР | 2006 |
|
RU2306621C1 |
| ЛИНИЯ ПРОДОЛЬНОЙ РЕЗКИ ЛЕНТЫ | 2007 |
|
RU2348493C1 |
| ПЕРЕНОСНАЯ ГРАВИРОВАЛЬНАЯ УСТАНОВКА ДЛЯ МНОГОЦВЕТНОЙ ОБРАБОТКИ ПОВЕРХНОСТЕЙ ВИТРИН | 1995 |
|
RU2108918C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ С ЧИСЛОВЫМ ПРОГРАММНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2706244C1 |
Изобретение относится к обработке поверхности крупногабаритных объектов. Гравировальная установка содержит двухкоординатное сканирующее устройство и устройство управления. Двухкоординатное сканирующее устройство включает первую пару параллельных между собой цилиндрических направляющих, вторую пару параллельных между собой цилиндрических направляющих, оси которых перпендикулярны осям первой пары направляющих и расположены в плоскости, параллельной плоскости, проходящей через оси первой пары направляющих. Цилиндрические направляющие первой пары расположены с обеспечением контакта их с обрабатываемой поверхностью объекта по линии, являющейся образующей соответствующей каждой из них цилиндрической боковой поверхности. Концевые участки первой пары направляющих жестко соединены с соответствующим каждому из них и расположенным сверху концевым участком соответствующей ему направляющей второй пары с образованием прямоугольной рамы с противолежащими сторонами, расположенными на разных уровнях. Кроме того, установка содержит четыре вакуумные присоски, установленные с возможностью продольного перемещения и фиксации в требуемом положении на соответствующей каждой из них державке удлиненной формы. Каждая державка удлиненной формы закреплена консольно и с возможностью поворота вокруг соответствующей ей оси, перпендикулярной плоскости, проходящей через оси первой пары направляющих. На каждой направляющей первой пары установлен соответствующий ей ползун, при этом упомянутые ползуны жестко соединены между собой первой парой стержней. Аналогично на каждой направляющей второй пары установлен соответствующий ей ползун. Эти ползуны также жестко соединены между собой второй парой стержней. Каретка установлена на ортогонально относительно друг друга расположенных двух парах упомянутых выше стержней с возможностью продольного относительно каждой пары стержней перемещения, а средства для обработки поверхности объекта установлены на каретке. Технический результат - возможность производить обработку поверхностей объектов, расположенных как горизонтально, так и вертикально. 2 н. и 2 з.п. ф-лы, 6 ил.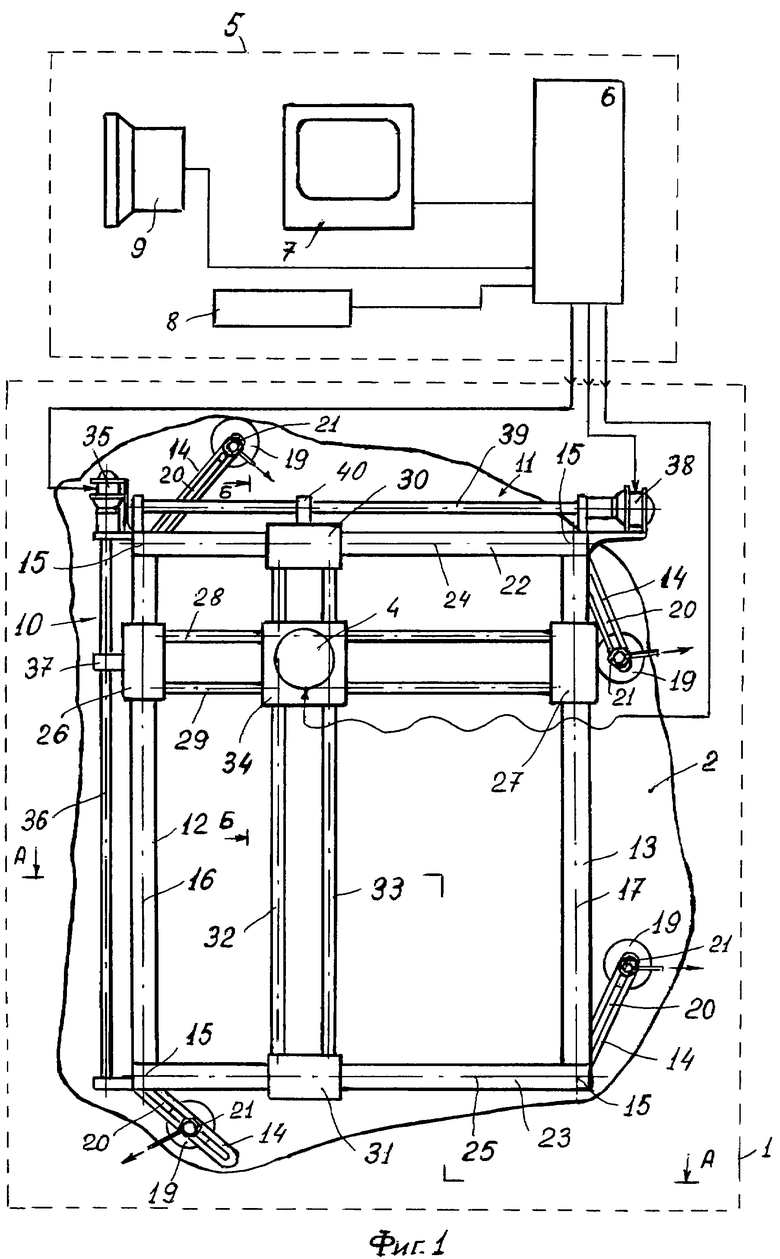
| ЮВЭНЕРГОМЕТАЛЛУРГПРОМ» | 0 |
|
SU262131A1 |
| ПЕРЕНОСНАЯ ГРАВИРОВАЛЬНАЯ УСТАНОВКА ДЛЯ МНОГОЦВЕТНОЙ ОБРАБОТКИ ПОВЕРХНОСТЕЙ ВИТРИН | 1995 |
|
RU2108918C1 |
| УСТРОЙСТВО ДЛЯ ДЕКОРАТИВНОЙ ОБРАБОТКИ ПОВЕРХНОСТЕЙ | 1993 |
|
RU2092321C1 |

