Изобретение относится к выполнению работ рекламно-информационного и декоративно-оформительного характера по поверхностям витрин, остекленных фасадов зданий и т.д. непосредственно на месте.
Известна переносная гравировальная установка для многоцветной обработки поверхностей витрин, содержащая основание на консольных опорах для установки на обрабатываемую поверхность и оптико-механический модуль [1].
Предложенная установка относится к классу линейно-круговых делительных машин со связнонепрерывной работой основных механизмов и состоит из основания на консольных опорах, оканчивающихся вакуум-присосками для фиксирования на обрабатываемой поверхности, вращающегося двухпоточного оптико-механического модуля, содержащего сканирующий и исполнительный механизмы, расположенные на противоположных концах в диаметральной плоскости вращения несущего полого вала, проходящего сквозь основание, установленного в опоре вращения перпендикулярно обрабатываемой поверхности.
Установка содержит также вакуум-насос, электронный блок управления, зеркальную камеру для перевертывания изображения оригинала на непрозрачной подложке и проецирования на поле движения фотоэлементов сканирующего механизма, электропривода вращения.
Сканирующий механизм состоит из направляющей несущей каретки с фотоэлементами, движущимися синхронно в диаметрально противоположные стороны от центра вращения посредством соединенного в бесконечную цепь тросика, расположенного параллельно направляющей посредством шкивов, установленных на ее концах. Каретки закреплены к противолежащим ветвям тросика.
Кратный полиспаст, содержащийся в сканирующем механизме, осуществляют его привод и увеличение изображения оригинала, подвижные шкивы которого установлены на одной из кареток, несущих фотоэлементы. Выбираемая ветвь кратного полиспаста посредством поддерживающих шкивов проходит через внутреннюю полость несущего вала, конец которой закреплен на одной из кареток исполнительного механизма, кинематическая схема движения кареток которого аналогична кинематической схеме сканирующего механизма.
Привод движения кареток исполнительного механизма осуществляет механизм движения и возврата, работа которого синхронизирована с вращением модуля. Каретки исполнительного механизма, установленного на траверсе, содержит электронно-оптические блоки, состоящие из фотоэлектрических схем, работающих независимо, исполнительных устройств (соленоид и т.д.) обрабатывающих инструментов - металлических дисков, имеющих электропривод вращения.
Для выполнения изображения в цвете используются широко известный при ручном гравировании метод натирания: вращающийся металлический (алюминий, медь, магний, цирконий, титан, серебро) диск периферийной поверхностью вводится в соприкосновение с поверхностью стекла. Диффундируя в приповерхностный слой частицы металла надежно закрепляются и образуют покрытие соответствующего цвета.
Для репродуцирования многоцветного оригинала применяется замена светофильтров, разложение оригинала на составляющие цвета с одновременной заменой обрабатывающих дисков и возможностью автоматизации вышеперечисленных операций.
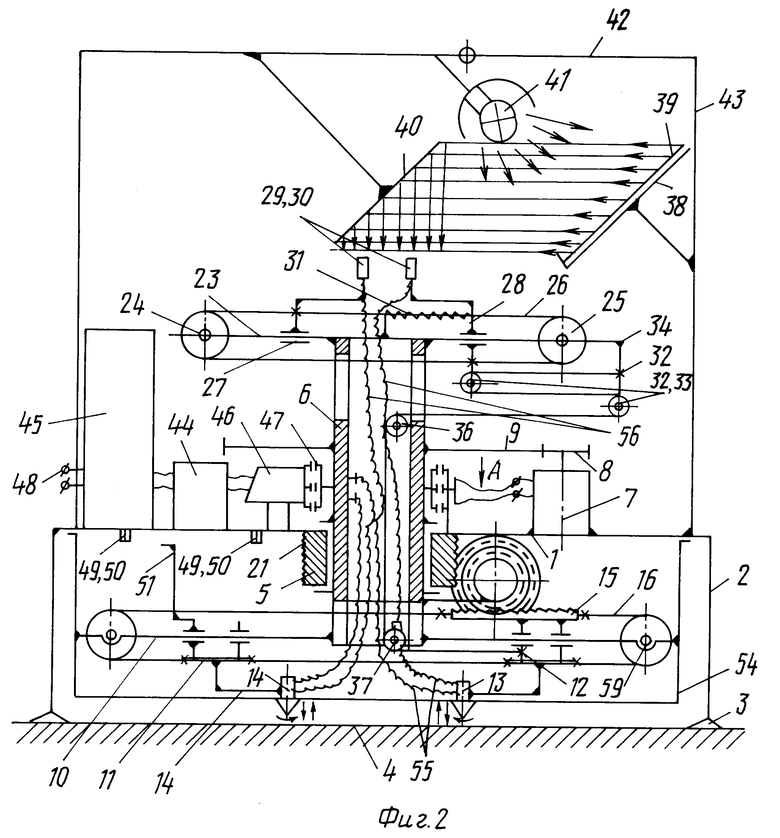
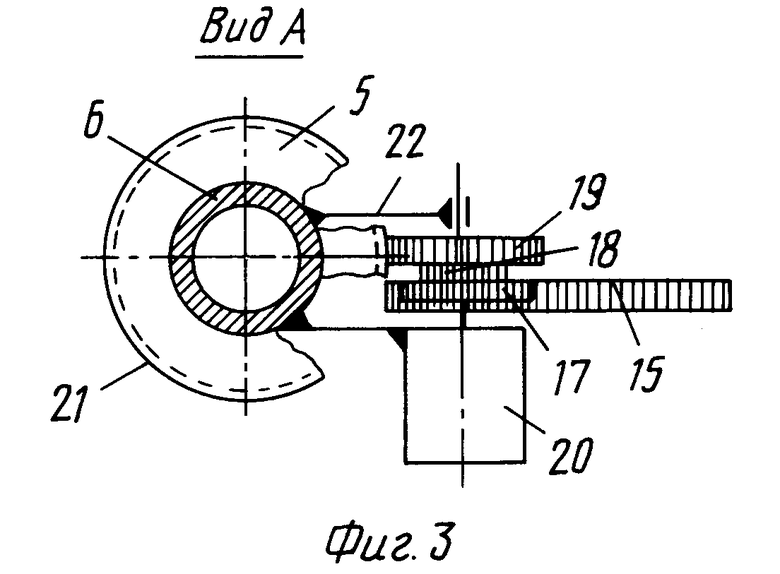
На фиг. 1 представлена установка с 10-кратным увеличением изображения; на фиг. 2 представлена функционально-кинематическая схема установки с 2-кратным увеличением изображения оригинала; на фиг. 3 - вид А; на фиг. 4 - схема движения исполнительных элементов.
Установка состоит из основания 1 на консольных опорах 2, оканчивающихся вакуум-присосками 3 для фиксирования на обрабатываемой поверхности 4. Основание 1 содержит опору вращения 5 несущего полого вала 6, проходящего сквозь основание и расположенного перпендикулярно обрабатываемой поверхности. Привод вращения несущего полого вала 6 состоит из электродвигателя 7 с жестко установленной на валу ведущей шестерней 8, ведомой шестерни 9. На конце ведущего полого вала 6, обращенного к обрабатываемой поверхности, установлена траверса 10, несущая каретки 11, 12, содержащие электронно-механические блоки 13, 14 и расположенные диаметрально противоположно.
Механизм синхронного движения и возврата состоит из зубчатой рейки 15, установленной на каретке 12, и троса 16, соединенных в бесконечную цепь и поддерживаемого посредством шкивов 59, 58, установленных на противоположных концах траверсы 10. Каретка 11 приводится в движение жестко закрепленной противолежащей от зубчатой рейки ветвью 16. Движение зубчатой рейки 15, установленной на каретке 12, осуществляется посредством шестерни 17,электромагнитной муфты 18, замкнутой в обесточенном состоянии, и шестерни 19, установленных на валу электродвигателя возврата 20. Шестерня 19 состоит в зацеплении с червяком 21, расположенным на наружной поверхности опоры вращения 5. Опора вращения шестерен 17, электромагнитная муфта 18 и шестерни 19, кронштейн 22 и электродвигатель возврата 20 жестко закреплены на несущем полом валу 6 и вращаются вместе с траверсой 10, шестерня 19, обкатываясь вокруг червяка 21 через муфту сцепления 18, шестерню 17, приводит в поступательное движение зубчатую рейку 15, установленную на каретке 12.
На противоположном конце несущего полого вала 6 расположен сканирующий механизм, состоящий из направляющей 23, шкивов 24, 25, тросика 26, кареток 27, 28, содержащих фотоэлементы 29,30, пружины возврата 31, кратного полиспаста, подвижный шкив 32 которого установлен на каретке 28. Неподвижный шкив 33 кратного полиспаста установлен на кронштейне 34 направляющей 23, где также зафиксирован конец неподвижной ветви 35 полиспаста.
Подвижная ветвь кратного полиспаста посредством поддерживающих шкивов 36, 37 проходит через внутреннюю полость несущего вала 6, конец зафиксирован на каретке 12 исполнительного механизма. Зеркальная камера для изображения оригинала состоит из предметного столика 38 для установки оригинала 39, зеркала 40, проецирующего изображение на поле движения фотоэлементов 29, 30, источника освещения 41 оригинала, лючка 42 для установки оригинала, кожуха 43, защищающего верхнюю часть установки от внешних воздействий.
Установка содержит также электронный блок управления 44, вакуум-насос 45 для обеспечения действия вакуум-присосок 3, щеткодержатель 46 и коллектора 47 подачи электропитания и управления муфтой 18 и электродвигателя возврата 20.
Электронный блок управления 44 содержит ввод электропитания 48, датчики 49, 50.
Управление срабатывания датчиков 49, 50 осуществляется посредством сигнального флажка 51, установленного на каретке 11 исполнительного механизма. Траверса 10 имеет защитный кожух 54. Исполнительные механизмы соединены с фотоэлементами 29, 30 и коллектором 47 посредством проводов 55, 56. Для приведения установки в транспортное положение 52 противолежащие опоры 2 имеют узлы поворота 53. Имеются исполнительные элементы 57.
Установка работает следующим образом.
Перед началом работы опоры 2 устанавливаются в рабочее положение, подключается электропитание 48.
Установка размещается на обрабатываемой поверхности 4, оператором включается вакуум-насос 45. По достижении требуемого атмосферного давления в вакуум-системе, обеспечивающего надежную фиксацию установки посредством вакуум-присосок 3, включается источник освещения оригинала 41. Через лючок 42 устанавливается оригинал 39, лючок закрывается.
Оператором производится следующая операция: включение электропитания двигателя 7 вращения и электромеханических блоков 13, 14. Вращающийся двухпоточный оптико-механический модуль обеспечивает движение исполнительных элементов 57, фотоэлементы 29, 30 движутся аналогично с замедлением в 2 раза по диаметру вращения.
Прохождение обрабатываемой поверхности 4 фиксирует датчик 49 посредством сигнального флажка 51.
Затем прекращается подача электропитания на электродвигатель 7 и электронно-механические блоки 13, 14. Включается электромагнитная муфта сцепления 18, разъединяя шестерни 17 и 19. Электродвигатель возврата перемещает каретки 11, 12, несущие блоки 13, 14. Подвижная ветвь кратного полиспаста через поддерживающие шкивы 37, 36, неподвижный шкив 33 выбирается посредством пружины 31 с одновременным движением к центру кареток 27, 28, содержащих фотоэлементы 29, 30.
Датчик 50 посредством сигнального флажка 51 фиксирует возвращение сканирующего и исполнительного механизмов в исходное состояние. Электронный блок управления 44 прекращает подачу электропитания на муфту 18 и электродвигатель возврата 20.
Оператором производится выключение вакуум-насоса 45, отключение электропитания 48 и приведение опор 2 в транспортное положение 52.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДЕКОРАТИВНОЙ ОБРАБОТКИ ПОВЕРХНОСТЕЙ | 1993 |
|
RU2092321C1 |
| Машина для обработки стеклоизделий | 1977 |
|
SU941324A1 |
| Машина для изготовления витых изделий с переменным направлением свивки | 1980 |
|
SU885379A2 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| КОНВЕЙЕР ДЛЯ СБОРКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ЖГУТОВ ПРОВОДОВ | 2009 |
|
RU2399107C1 |
| АВТОМАТ ДЛЯ КОПИРОВАЛЬНОГО ГРАВИРОВАНИЯ | 1948 |
|
SU85361A1 |
| УСТАНОВКА ИОННО-ПЛАЗМЕННОЙ ОБРАБОТКИ ИЗДЕЛИЙ | 2013 |
|
RU2538708C2 |
| НЕСУЩИЙ ВИНТ ВЕРТОЛЕТА С ИЗМЕНЯЕМОЙ ГЕОМЕТРИЕЙ ЛОПАСТЕЙ | 1996 |
|
RU2171207C2 |
| Устройство для нанесения антиадгезионных покрытий на хлебные формы | 1980 |
|
SU1007628A1 |
| Пильно-обрабатывающее устройство для обработки пластикового профиля | 2019 |
|
RU2710702C1 |
Изобретение относится к переносной гравировальной установке для многоцветной обработки поверхностей витрин. Сущность изобретения заключается в том, что оптико-механический модуль выполнен в виде вращающегося двухпоточного модуля, состоящего из полого несущего вала, проходящего через основание перпендикулярно обрабатываемой поверхности, на противоположных концах которого в диаметральной плоскости его вращения расположены сканирующий и исполнительный механизмы. 4 ил.
Переносная гравировальная установка для многоцветной обработки поверхностей витрин, содержащая основание на консольных опорах для установки на обрабатываемую поверхность и оптико-механический модуль, отличающаяся тем, что оптико-механический модуль выполнен в виде вращающегося двухпоточного модуля, состоящего из полого несущего вала, проходящего через основание перпендикулярно обрабатываемой поверхности, на противоположных концах которого в диаметральной плоскости его вращения расположены сканирующий и исполнительный механизмы, состоящие из двух независимых фотоэлектрических схем с исполнительными механизмами и расположенные с возможностью синхронного движения в диаметрально противоположные стороны, и имеет зеркальную камеру для перевертывания и проецирования изображения на поле движения фотоэлементов, при этом кратный полиспаст сканирующего механизма установлен с возможностью движения кареток, имеющих фотоэлементы с увеличением изображения оригинала, кратное двум в зависимости от количества ветвей в кратном полиспасте, подвижные шкивы которого установлены на одной из кареток, а выбираемая подвижная ветвь посредством поддерживающих шкивов проходит через внутреннюю полость несущего вала и закреплена на одной из кареток исполнительного механизма.
| GB, патентр, 1462979, кл | |||
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
