Изобретение относится к нанотехнологии, а более конкретно к устройствам, обеспечивающим перемещение объекта в плоскости по двум координатам с погрешностью до 0,1 нм в диапазоне до 1 мм. Например, устройство может быть использовано для перемещения образцов, носителей образцов, носителей зондов и других элементов в сканирующей зондовой микроскопии.
Известен координатный стол, содержащий платформу, на которой посредством четырех плоских пружин закреплена первая каретка с возможностью перемещения по первой координате X. Внутри первой каретки, также с помощью четырех плоских пружин, закреплена вторая каретка с возможностью перемещения по второй координате Y, перпендикулярной координате X. Плоские пружины в данном устройстве выполняют роль направляющих. Первая и вторая каретки расположены с возможностью взаимодействия с первым и вторым пьезоприводами, а также с первым и вторым пружинными упорами, закрепленными на платформе координатного стола [1].
Первым недостатком указанного устройства является малый ход кареток координатного стола, связанный с прямым использованием пьезоприводов.
Второй недостаток связан с использованием плоских пружин, консольно-закрепленных на платформе и первой каретке, что приводит к нефункциональному смещению по координате, перпендикулярной плоскости XY.
Третий недостаток заключается в том, что вторая каретка установлена на первой каретке, а это приводит к увеличению массы перемещаемого элемента.
Известен также двухкоординатный микропозиционер, содержащий основание, на котором закреплен первый привод, сопряженный посредством первого рычага и первого гибкого поводка с первой подвижной кареткой. При этом первый рычаг установлен на основании с использованием первого гибкого шарнира, а первая подвижная каретка установлена на основании посредством первых гибких направляющих. На первой подвижной каретке закреплен второй привод, сопряженный посредством второго рычага и второго гибкого поводка со второй подвижной кареткой. При этом второй рычаг установлен на первой подвижной каретке с использованием второго гибкого шарнира, а вторая подвижная каретка установлена на первой подвижной каретке посредством вторых гибких направляющих [2]. Это устройство выбрано в качестве прототипа предложенного решения.
Первый недостаток указанного устройства заключается в том, что второй привод и второй рычаг установлены на первой подвижной каретке, что увеличивает массу подвижного элемента и соответственно уменьшает точность перемещения и скорость его отработки.
Второй недостаток - заключается в том, что в данной конструкции отсутствуют элементы термокомпенсации, что при различных коэффициентах линейного расширения материалов приводов и остальных элементов конструкции также может привести к снижению точности отработки перемещения.
Задача изобретения заключается в создании двухкоординатного микропозиционера, обеспечивающего необходимую точность перемещения объектов в измерительных системах, например, таких как зондовые микроскопы.
Технический результат изобретения заключается в повышении точности перемещения подвижного элемента и уменьшении времени его установки при переходе на новое место.
Указанный технический результат достигается тем, что в двухкоординатном микропозиционере, содержащем основание, на котором закреплен первый привод по первой координате, сопряженный посредством первого рычага и первого гибкого поводка с первой подвижной кареткой, при этом первый рычаг установлен на основании с использованием первого гибкого шарнира, а первая подвижная каретка установлена на основании посредством первых гибких направляющих, на первой подвижной каретке расположена вторая подвижная каретка посредством вторых гибких направляющих, а также содержащем второй привод по второй координате со вторым рычагом, имеющим второй гибкий шарнир, и второй гибкий поводок, второй привод закреплен на основании и сопряжен вторым рычагом посредством второго гибкого поводка со второй подвижной кареткой, при этом второй рычаг установлен на основании с использованием второго гибкого шарнира.
Существует вариант, в котором между основанием и первым и вторым гибкими шарнирами введены вставки с температурным коэффициентом расширения, отличающимся от температурных коэффициентов основания, первой и второй подвижных кареток, первого и второго рычагов, первых и вторых гибких направляющих и приводов.
Существует также вариант, в котором к первому и второму приводам по первой и второй координатам присоединены первый и второй тензодатчики.
Возможен вариант, в котором между первой подвижной кареткой и основанием установлен первый датчик измерения положения, а между второй подвижной кареткой и первой подвижной кареткой установлен второй датчик измерения положения.
Возможен также вариант, в котором между первой подвижной кареткой и основанием установлен первый датчик измерения положения, а между второй подвижной кареткой и основанием установлен второй датчик измерения положения.
Существуют также варианты, в которых первый и второй датчики измерения положения емкостные или интерферометрические.
Возможен также вариант, в котором во второй подвижной каретке имеется сквозное отверстие.
Кроме этого возможен вариант, в котором ко второй подвижной каретке прикреплен держатель образца такой, что поверхность для установки образца опущена в сквозное отверстие ниже верхней поверхности второй подвижной каретки.
На фиг.1 изображен двухкоординатный микропозиционер.
На фиг.2 изображено устройство гибкой направляющей.
На фиг.3 изображено устройство гибкой направляющей с меньшим паразитным уходом.
На фиг.4 изображен двухкоординатный микропозиционер со вставками для термокомпенсации дрейфа.
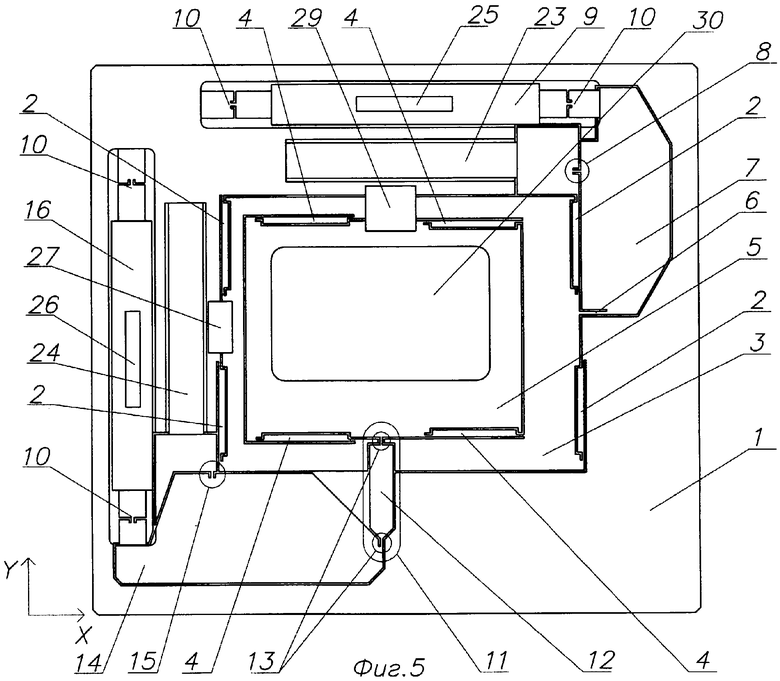
На фиг.5 изображен двухкоординатный микропозиционер со вторым вариантом расположения датчиков измерения положения.
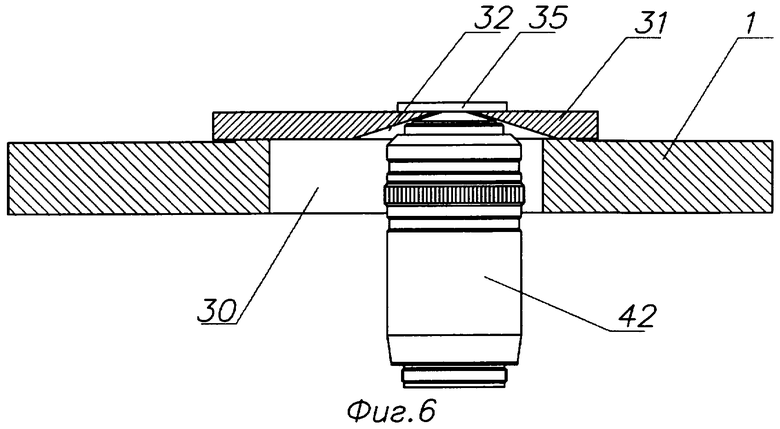
На фиг.6 изображен двухкоординатный микропозиционер с отверстием в каретке и держателем образца.
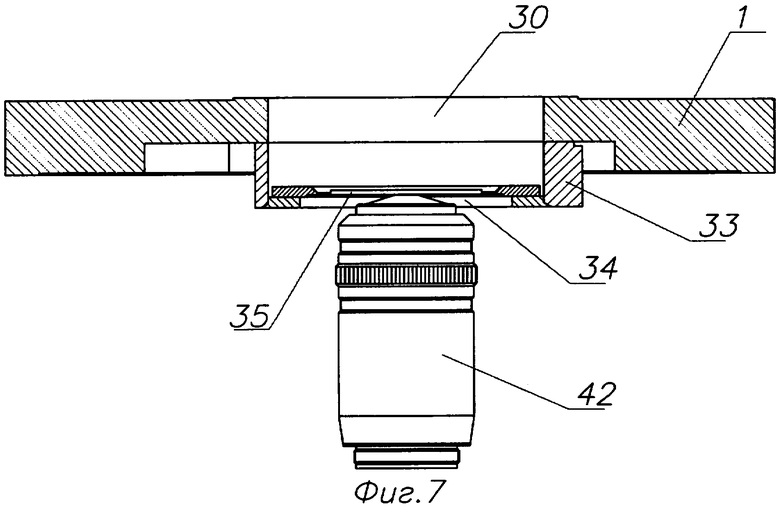
На фиг.7 изображен двухкоординатный микропозиционер с отверстием в каретке и вторым вариантом держателя образца.
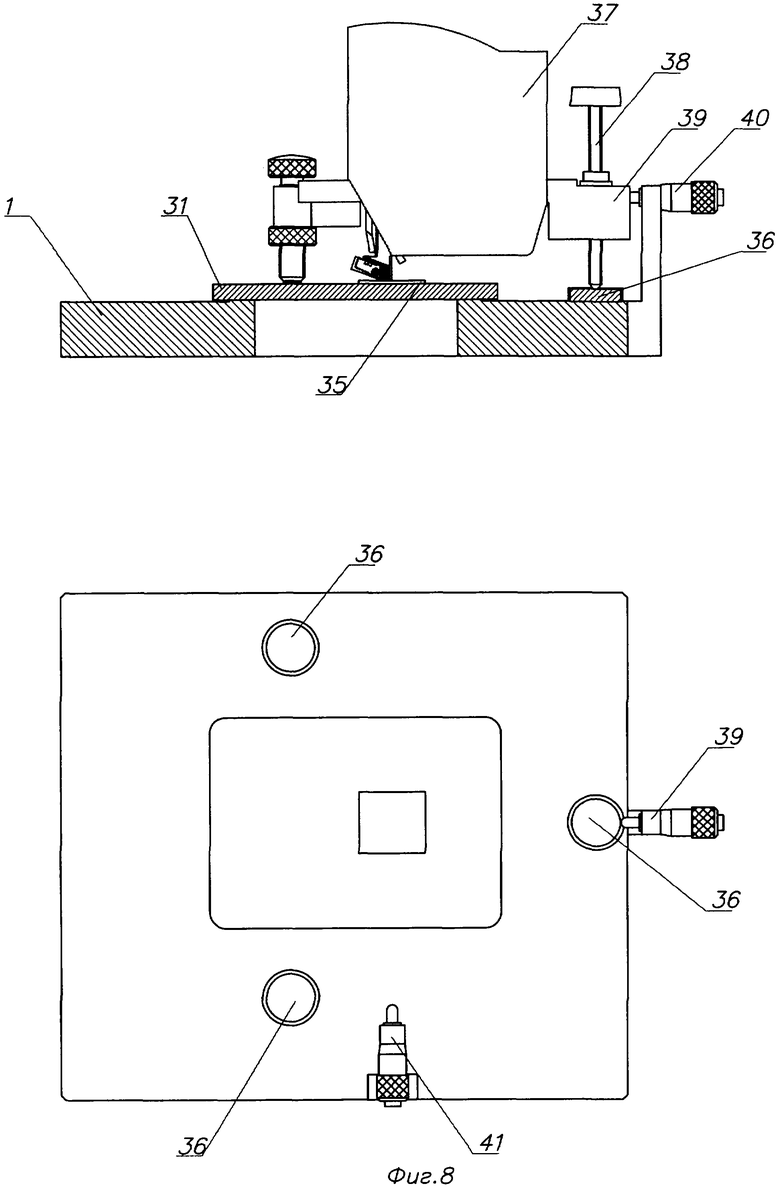
На фиг.8 изображен двухкоординатный микропозиционер с установленной на нем измерительной головкой сканирующего зондового микроскопа.
Двухкоординатный микропозиционер (фиг.1) содержит основание 1, к которому через первые гибкие направляющие 2 (описаны ниже) присоединена первая подвижная (по первой координате X) каретка 3. К каретке 3 через вторые гибкие направляющие 4 (описаны ниже) присоединена вторая подвижная (по второй координате Y) каретка 5. Каретка 3 через первый гибкий поводок 6 присоединена к первому рычагу 7. Первый рычаг 7 присоединен к основанию 1 при помощи первого гибкого шарнира 8. Первый привод 9 по первой координате Х присоединен к основанию 1 и к первому рычагу 7 через вторые гибкие шарниры 10. Подробно гибкие шарниры см. в [3]. Каретка 5 через второй гибкий поводок 11, выполненный в виде первого стержня 12 с двумя третьими шарнирами 13, присоединена ко второму рычагу 14. Второй рычаг 14 присоединен к основанию 1 при помощи четвертого гибкого шарнира 15. Второй привод 16 по второй координате Y присоединен к основанию 1 и ко второму рычагу 14 через вторые гибкие шарниры 10. Следует заметить, что в качестве первого 9 и второго 16 приводов можно использовать пьезоприводы. Подробно пьезоприводы см. в [3]. Также могут быть применены приводы с использованием магнитострикции или электрострикции. Как вариант исполнения, присоединение приводов 9 и 16 к основанию 1 и рычагам 7, 14 может быть выполнено не с помощью вторых гибких шарниров 10, а через упоры, представляющие собой сферическую поверхность, упертую в плоскую поверхность [3]. Этот вариант на рисунке не показан.
Второй гибкий поводок 11 выполнен как одно целое вместе с рычагом 14 и кареткой 5. В этом случае поводок 11 перерезает каретку 3, и она соединена дополнительной накладкой, которая, чтобы не загромождать рисунок, не показана. В другом варианте, поводок 11 может быть выполнен как отдельный элемент и затем присоединен к каретке 5 и основанию 1.
На фиг.2 показаны направляющие 2, 4, выполненные в виде стержня 17 с двумя пятыми гибкими шарнирами 18 на концах. Для определенности изображена правая нижняя направляющая 2 на фиг.1. В этом случае нижний шарнир 18 прикреплен к каретке 3, а верхний шарнир 18 прикреплен к основанию 1. Также могут быть использованы любые направляющие, обеспечивающие перемещение в одном направлении. Для примера на фиг.3 приведена гибкая направляющая 19, обеспечивающая минимальный уход от прямолинейной траектории движения кареток. Она выполнена в виде двух стержней 20 с четырьмя шестыми гибкими шарнирами 21 на концах с соединяющим элементом 22.
Во втором варианте (фиг.4) между основанием 1 и местами присоединения гибких шарниров 8, 15 введены вставки 23 и 24 с температурным коэффициентом расширения, отличающимся от температурных коэффициентов расширения основания 1, первой 3 и второй 5 подвижных кареток, первого 7 и второго 14 рычагов, первых 2 и вторых 4 гибких направляющих и приводов 9 и 16.
В третьем варианте (фиг.1, 4) к приводам 9 и 16 присоединены первый и второй тензодатчики 25, 26 для измерения деформации приводов 9, 16.
В четвертом варианте (фиг.1, 4) между первой кареткой 3 и основанием 1 установлен первый датчик измерения положения 27 первой каретки 3 относительно основания 1, а между второй кареткой 5 и первой кареткой 3 установлен второй датчик измерения положения 28 второй каретки 5 относительно первой каретки 3.
В пятом варианте (фиг.5) между кареткой 3 и основанием 1 установлен первый датчик измерения положения 27 каретки 3 относительно основания 1, а между кареткой 5 и основанием 1 установлен второй датчик измерения положения 29 каретки 5 относительно основания 1.
Датчики 27, 28 и 29 могут быть, например, емкостными [3], интерферометрическими или индукционными [3].
В шестом варианте (фиг.1, 4, 5, 6) в каретке 5 имеется сквозное отверстие 30. В этом случае в держателе образца 31 также есть отверстие 32 (фиг.6).
В седьмом варианте (фиг.7) к каретке 5 прикреплен держатель образца 33 такой, что в держателе 33 имеется отверстие 34, и поверхность держателя образца 33, на которой установлен образец 35, опущена ниже верхней поверхности каретки 5.
Возможные варианты выполнения двухкоординатного микропозиционера не ограничиваются вышеописанными вариантами. Второй вариант со вставками 23, 24 может быть использован совместно с любым из вариантов от третьего до седьмого. Шестой и седьмой варианты могут быть использованы в комбинации с любым из вариантов с использованием датчиков. Кроме того, принцип, использованный во втором варианте, может быть применен для построения однокоординатных и многокоординатных микропозиционеров.
В одном из вариантов использования микропозиционера (фиг.8) на каретке 5 закреплен держатель образца 31 с образцом 35. На основании 1 закреплены три опорные площадки 36, на которых установлена измерительная головка 37 сканирующего зондового микроскопа с механизмом приближения зонда к поверхности образца, представляющим собой винт 38 и кронштейн 39. На основании 1 закреплены юстировочные Х и Y элементы 40, 41 позиционирования измерительной головки 37 вдоль поверхности образца 35. Эти юстировочные Х и Y элементы 40, 41 присоединены к измерительной головке 37. На виде сверху измерительная головка 37 не показана, чтобы не загромождать рисунок.
При использовании шестого варианта через отверстие 30 к образцу, установленному на держателе образца 31, может быть подведен объектив 42 оптического микроскопа (фиг.6).
При использовании седьмого варианта (фиг.7) к образцу 35 также может быть подведен объектив 42 оптического микроскопа.
Шестой вариант (фиг.6) может комбинироваться с вариантом, в котором установлена измерительная головка 37 (фиг.8).
Устройство работает следующим образом. Первые гибкие направляющие 2 задают направление движения первой подвижной каретки 3 по первой координате X. Вторые гибкие направляющие 4 задают направление движения второй подвижной каретки 5 по второй координате Y. Каретку 3 приводят в движение через первый гибкий поводок 6 первым рычагом 7, при этом первый рычаг 7 поворачивается на первом гибком шарнире 8. Первый привод 9 приводит в движение первый рычаг 7 через второй гибкий шарнир 10. Каретку 5 через второй гибкий поводок 11 приводят в движение вторым рычагом 14, при этом второй рычаг 14 поворачивается на четвертом гибком шарнире 15. Второй привод 16 приводит в движение второй рычаг 14 через второй гибкий шарнир 10. Первый гибкий поводок 9 устраняет влияние поперечного смещения рычага 7 в месте крепления поводка 9 на каретку 3. Аналогичную функцию выполняет второй гибкий поводок 11. Вторые гибкие шарниры 10, через которые закреплены приводы 9 и 16, служат для устранения поперечного воздействия на приводы 9 и 16, а также компенсируют технологические уходы, возникающие при изготовлении микропозиционера. Гибкие направляющие 2 и 4 обеспечивают практически прямолинейное движение кареток 3 и 5.
Направляющая 2, показанная на фиг.2, работает следующим образом. При перемещении, шарниры 18 изгибаются и стержень 17 наклоняется. Развороту каретки 3 препятствует наличие как минимум двух разнесенных направляющих 2 (фиг.1). При наклоне стержня 17 возникает поперечное паразитное смещение, однако оно второго порядка малости относительно основного перемещения. Тем не менее, поперечное смещение можно значительно уменьшить применением направляющей 19, изображенной на фиг.3. Ее работа подробно рассмотрена в [3].
Во втором варианте (фиг.4) вставки 23, 24 компенсируют дрейф кареток 3, 5, возникающий при изменении температуры всех частей микропозиционера на одинаковую величину. Рассмотрим для определенности работу вставки 23 по координате Х для случая, когда температурный коэффициент расширения αП материала привода 9 меньше, чем температурный коэффициент расширения α0 материала основания 1. Будем считать, что шарниры 10, рычаг 7, поводок 6 и каретка 3 сделаны из того же материала, что и основание 1. Чаще всего используется алюминиевый сплав. Будем считать, что дрейф отсутствует, если каждая точка каретки 3 при изменении температуры изменяет свое положение так, как если бы каретка 3 и основание 1 были единым целым. В отсутствие вставки 23 (фиг.1) при повышении температуры сечение 43 переместится вправо больше, чем правый торец привода 9. Рычаг 7 передаст это движение с коэффициентом передачи r в сечение 44, так что оно сместится вправо больше. Величину дрейфа δ сечения 44 при изменении температуры на один градус можно вычислить по формуле
δ=rlП(α0-αП),
где lП - длина привода 9.
При наличии вставки 23 с меньшим температурным коэффициентом расширения αВ, чем у основания 1, перемещение сечения 43 будет меньше. Соответственно, станет меньше и дрейф δ сечения 44. Его можно вычислить по формуле
δ=rlП(α0-αП)-(1+r)lВ(α0-αВ),
где lВ - длина вставки 23. Дрейф δ станет равным нулю при длине вставки 23, вычисляемой по формуле
 .
.
Вставка 24 работает аналогичным образом. В случае использования низковольтной пьезокерамики [3] с температурным коэффициентом расширения примерно (-2)×10-6 в приводах 9, 16 вставки 23, 24 могут быть выполнены из инвара. В случае выполнения основания 1 из инвара и применения высоковольтной керамики с температурным коэффициентом расширения примерно 7×10-6 вставки необходимо делать из материала с большим температурным коэффициентом расширения, чем у материала основания 1, например из стали.
В третьем варианте (фиг.1, 4) рассмотрим работу микропозиционера для случая, когда приводы 9 и 16 выполнены из пьезокерамики. В этом случае при подаче электрического напряжения на привод 9 и/или привод 16 первый и/или второй тензодатчики 25, 26 деформируются совместно с приводами 9, 16 и изменяют свое электрическое сопротивление. Измеряя его, можно получать данные о величине деформации приводов 9, 16.
В четвертом варианте (фиг.1, 4) при перемещении первой каретки 3 относительно основания 1 первый датчик измерения положения 27 измеряет это перемещение. Второй датчик измерения положения 28 измеряет перемещение второй каретки 5 относительно первой каретки 3.
В пятом варианте (фиг.5) при перемещении первой каретки 3 относительно основания 1 первый датчик измерения положения 27 измеряет это перемещение. Второй датчик измерения положения 28 измеряет перемещение второй каретки 5 относительно основания 1.
В шестом варианте (фиг.1, 4, 5, 6) через отверстие 30 и через отверстие 32 к образцу 35 подводится объектив 42, через который может производиться наблюдение образца 35 и воздействие на него светом.
В седьмом варианте (фиг.7) через отверстие 30 в каретке 5 образец 35 устанавливается на держатель образца 33. Объектив 42 подводится к образцу 35 через отверстие 34. В таком варианте использования микропозиционер и объектив 42 установлены на инвертированном микроскопе (не показан) (фиг.6). При этом элементы микропозиционера не препятствуют повороту турели инвертированного микроскопа с объективом 42 при смене объективов.
В варианте использования микропозиционера с измерительной головкой 37 (фиг.8) зонд, входящий в измерительную головку 37 сканирующего зондового микроскопа, подводится к верхней поверхности образца 35 при помощи винта 38. Далее производится измерение свойств поверхности образца 35. Юстировочные элементы 40, 41 перемещают измерительную головку с зондом и позиционируют зонд в нужную точку образца 35.
При комбинировании шестого варианта (фиг.6) с вариантом, в котором установлена измерительная головка 37 (фиг.8), верхняя поверхность прозрачного образца 35 может наблюдаться в оптический микроскоп через объектив 42 и одновременно к ней сверху может быть подведен зонд измерительной головки 37 (фиг.6, 8).
При использовании микропозиционера во втором варианте можно выбрать параметры вставок 23, 24 так, чтобы обеспечить неподвижность определенной точки на каретке 5 относительно другой точки, например точки основания 1, при изменении температуры всех частей микропозиционера на одинаковую величину.
Установка второго привода на основании позволяет повысить жесткость конструкции, снизить вес первой подвижной каретки по сравнению с вариантом, где второй привод установлен непосредственно на первой подвижной каретке. Это, в свою очередь, обеспечивает более высокие резонансные частоты и более высокие скорости сканирования, меньшие динамические ошибки при прочих равных условиях.
Применение вставок с температурным коэффициентом расширения, отличающимся от температурных коэффициентов основания, первой и второй подвижных кареток, первого и второго рычагов, первых и вторых гибких направляющих, первого и второго приводов, позволяет устранить дрейф, возникающий в случае изменения температуры всех частей микропозиционера на одинаковую величину.
Использование тензодатчиков обеспечивает возможность точного измерения положения подвижных рамок и устранение нелинейности, гистерезиса и крипа, возникающего в приводах. Особенно это существенно для приводов из пьезокерамики.
Использование датчиков, установленных между каретками и основанием или между каретками, позволяет проводить измерения непосредственно положения подвижных кареток, тогда как при использовании тензодатчиков измеряется деформация приводов. Это обеспечивает более высокую линейность перемещения, долговременную стабильность, ортогональность, поскольку ортогональность в значительной мере задается самими датчиками, а не точностью изготовления элементов микропозиционера. Применение емкостных датчиков позволяет получить меньшее шумовое перемещение кареток по сравнению с тензодатчиками. При использовании интерферометрических датчиков измерения производятся с непосредственной привязкой к длине волны света. Это позволяет отказаться от калибровки перемещения при производстве и в процессе эксплуатации. Кроме того, интерферометрические датчики обеспечивают также еще меньшее шумовое перемещение рамок.
Наличие отверстия в каретке позволяет использовать освободившееся пространство для введения дополнительных элементов для воздействия на образец и изучения его различными методами. В частности, можно приблизить объектив (например, инвертированного оптического микроскопа) к поверхности образца снизу, а для прозрачных образцов изучать его в объеме или его верхнюю поверхность. Причем можно одновременно изучать или воздействовать на образец как зондом, так и светом.
Применение держателя образца такого, что поверхность держателя образца, на которой установлен образец, опущена ниже верхней поверхности второй каретки, позволяет при использовании двухкоординатного микропозиционера совместно с инвертированным оптическим микроскопом производить смену объектива поворотом турели и обеспечивает быструю смену увеличения микроскопа и оптических методик, что повышает удобство работы, снижает затраты времени на поиск нужного места на образце и на его исследование.
Применение микропозиционера с измерительной головкой сканирующего зондового микроскопа дает возможность создать зондовый микроскоп, позволяющий измерять расстояния на образце с высокой точностью, обеспечить высокую точность и повторяемость позиционирования образца.
Применение микропозиционера с измерительной головкой сканирующего зондового микроскопа и объективом снизу позволяет одновременно изучать и/или воздействовать на образец двумя разными способами.
ЛИТЕРАТУРА.
1. Патент US5360974, G21K 5/10, 1992 г.
2. Патент US4506154, G21K 5/10,1985 г.
3. Каталог «MicroPositioning, NanoPositioning, NanoAutomation», Physik Instrumente», 2001 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКООРДИНАТНАЯ МЕТРОЛОГИЧЕСКАЯ ПЛАТФОРМА | 2007 |
|
RU2365953C1 |
| КООРДИНАТНЫЙ СТОЛ | 2003 |
|
RU2255321C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| Сканирующий зондовый микроскоп, совмещенный с устройством модификации поверхности образца | 2017 |
|
RU2653190C1 |
| УСТРОЙСТВО МАНИПУЛИРОВАНИЯ | 2014 |
|
RU2591871C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| ИНЕРЦИОННЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2465712C2 |
Изобретение относится к нанотехнологии, а именно к устройствам, обеспечивающим перемещение объекта в плоскости по двум координатам, и может быть использовано для перемещения образцов, носителей образцов, носителей зондов и других элементов в сканирующей зондовой микроскопии. Изобретение направлено на повышение быстродействия и точности измерений. Этот результат обеспечивается за счет того, что двухкоординатный микропозиционер содержит основание, на котором закреплен первый привод по первой координате, сопряженный посредством первого рычага и первого гибкого поводка с первой подвижной кареткой, при этом первый рычаг установлен на основании с использованием первого гибкого шарнира, а первая подвижная каретка установлена на основании посредством первых гибких направляющих. На первой подвижной каретке расположена вторая подвижная каретка посредством вторых гибких направляющих. Имеется второй привод по второй координате со вторым рычагом, имеющим второй гибкий шарнир, и второй гибкий поводок. Второй привод закреплен на основании и сопряжен вторым рычагом посредством второго гибкого поводка со второй подвижной кареткой. Второй рычаг установлен на основании с использованием второго гибкого шарнира. Между основанием и первым и вторым гибкими шарнирами введены вставки с температурным коэффициентом расширения, отличающимся от температурных коэффициентов основания, первой и второй подвижных кареток, первого и второго рычагов, первых и вторых гибких направляющих и приводов. К первому и второму приводам по первой и второй координатам могут быть присоединены первый и второй тензодатчики измерения положения. 8 з.п. ф-лы, 8 ил.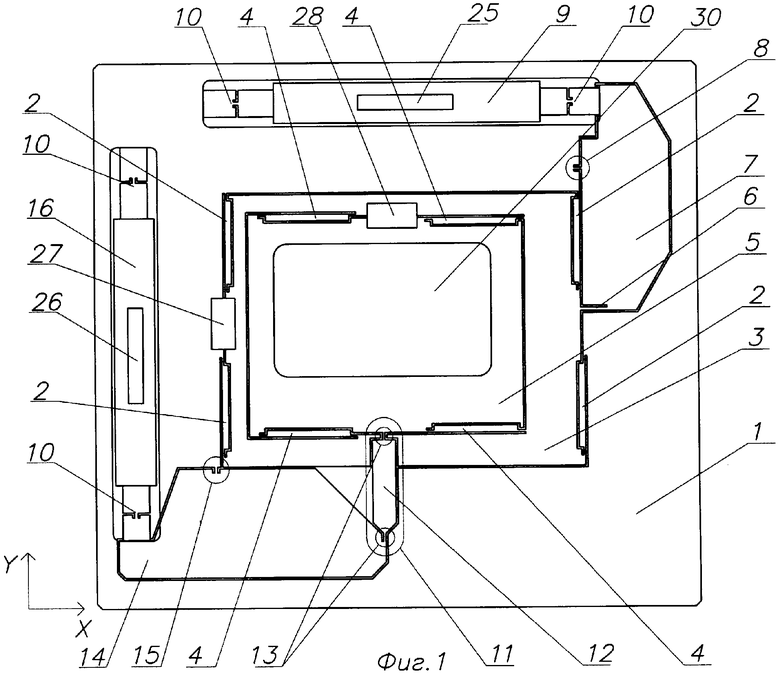
| US 4506154 А, 19.03.1985 | |||
| US 5360974 А, 01.11.1994 | |||
| ВСЕСОЮЗНАЯ ПДТШНО-^^^^^''''^^'^^^^' | 0 |
|
SU365238A1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
| Днище блока при доставке руды водным потоком | 1989 |
|
SU1645518A1 |
| НАНОМЕТРИЧЕСКОЕ ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 2002 |
|
RU2233736C2 |
| WO 8401660 А, 26.04.1984. | |||

