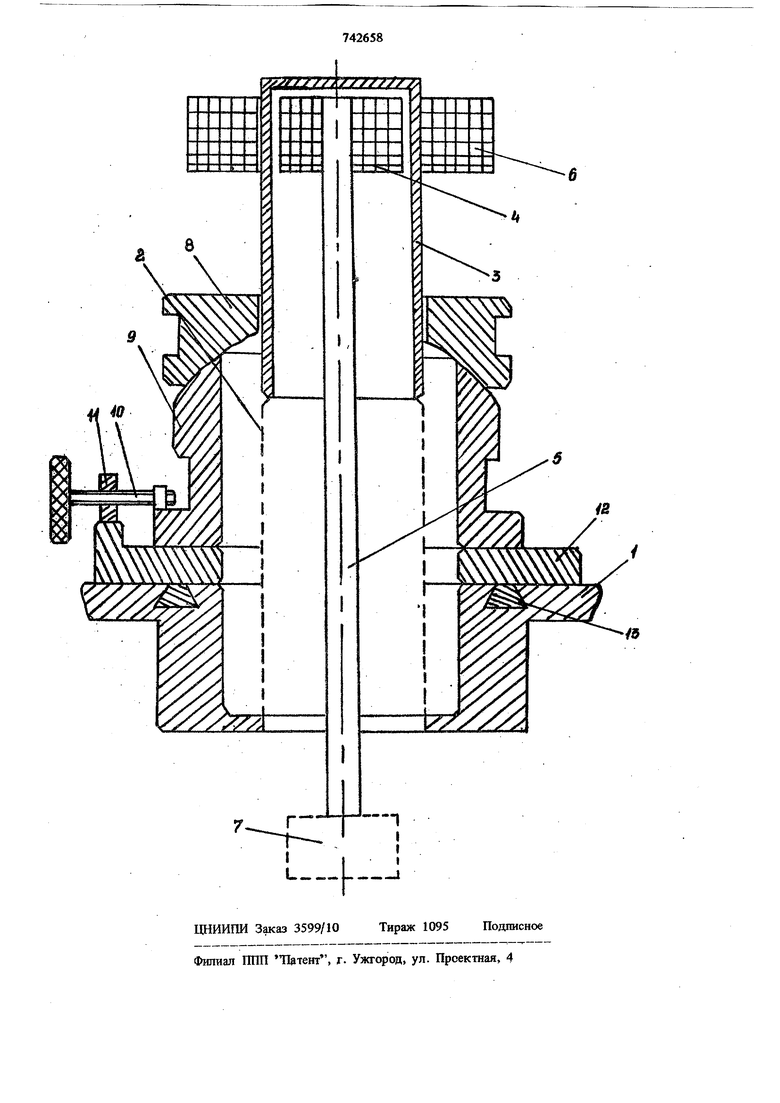
Изобретение относится к измерительной технике и может быть использовано в области вакуумного приборостроения. Известен сильфонный ввод поступательного движения, при котором к вакуумной камере жестко крепится неподвижная труба, в которой через сильфон герметично присоединена подвижна труба, имеющая возможность перемещаться вдоль своей оси. В трубах, в направляющих, установлен ведомый щток, имеющий зубья вдоль своей длины. В подвижной и неподвижной трубах выполнены возвратно-поступательные механизмы, сильфонные штоки которых снабжены зубчатыми прижимами, контактирующими с зубьями ведомого щтока. При зацеплении штока прижимом подвижной трубы шток перемещается вместе с последней относительно неподвижной трубы в вакуумный обьем. Далее прижим неподвижной трубы выходит из зацепления и осуществляется зацепление штока прижимом неподвижной трубы, при этом подвижная труба возвращается в исходное положение и цикл перемещения повторяется. Суммарная величина перемещения определяется количеством циклов . и величиной перемещения одного цикла 1 . Недостатком ввода является отсутствие возможности сложного перемещения объекта внутри камеры, так как ввод позволяет производить только возвратно-поступательное движение вдоль своей оси. Наиболее близким к предлагаемому является устройство ввода движения, в котором, к фланцу, которым ввод присоединен к вакуумной камере, приварен внецший сильфон, один торец которого сваривается со стаканом, а другой - с втулкой. Втулка зафиксирована относительно стакана стопсфным кольцом. К стакану, втулке и щтоку ввода последовательно приварены два внутренних сильфона. Один из этих сильфонов приварен между стаканом и кольцом, сферическая поверхность которого допускает необходамые покачивания направляющей втулки вместе со щтоком относительно стакана. Осевая фиксация направляющей втулки осущест влена установочным кольцом и развальцовкой правого торца самой втулки. Шток с помощью шарнирного соединения сочленен с поступатель37но движущимся винтом при вращении гайки. При маштулировании рабочим органом в такой конструкщш возможна одновременная комбинация двух движешш; осевого перемещения рабо чего органа вдоль оси штока j углового 12. Недостаток такого ввода движения - малая зойа манипулирования в камере, гак как отсутствует возможность движения рабочего органа в плоскости, перпевдикулярной оси симметрии ввода. Цель изобретения - расщирение диапазона манипулирования. Эта цель достигается за счет того, что в устройстве ввода движения в камеру, содержащем исполнительный механизм, размещенный в стакане, герметично присоеданенном к камере с помощью сильфона, опорную шайбу со сферической поверхностью, контактирующей со сферой опорной пяты, закрепленной на камеруб соосно стакану, шайба установлена с кольцевым зазором относительно внешней поверхности ста кана, а опорная пята установлена на двухкоординатном механизме перемещения в плоскости, перпендикулярной оси стакана. На чертеже схематически изображено устройство ввода движения в камеру. К краям отверстия в корпусе 1 камеры одним концом герметично присоединен (приварен, припаян и т.д.) металлический сильфон 2. К другому концу сильфона 2 также герметично присоединен корпус ввода в виде стакана 3 с помещенными в нем элементами исполнитель ного механизма: : ведомым магнитом 4, штоком 5. Причем, магнит 4 жестко установлен на щтоке 5. Ведущий магнит 6 установлен на наружной цилиндрической поверхности стакана 3 с возможностью перемещения вдоль оси стакана 3. Возможны и другие варианты выполнения исполнительного механизма, например, шток 5 может быть введен в стакан 3 через сильфон и тд. (на фиг. не показаны). Принципиального значения для предлагаемого изобретения конструкция исполнительного механизма не имеет, однако наличие его элементов в корпусе 3 обязательно. Конец штока 5, введенный в вакуумную камеру, соединен с рабочим узлом 7 (это может быть толкатель, предметный столик, захват и т.д.). Наружная поверхность трубчатого корпуса 3 является направляющей для перемещения вдоль него кольца 8. Кольцо 8 имеет пояс в виде сферы, контактирующей со сферической поверхностью опорной пяты 9, которая установлена на двухкоординатном юстировочном механизме перемещения. Центр сферических поверхностей кольца 8 и опорной пяты 9 должен лежать на оси симметрии стакана 3 в направлении корпуса I относительно кольца 8. Только В этом случае обеспечивается возможность наклона стакана 3 с исполнительным механизмом относительно корпуса 1 в любой плоскости, проходящей через ось стакана 3. Механизм перемещения по каждой из двух координат представляет собой кинематическую пару винт-гайка (например, для одной из координат соответственно 10 и 11, а по второй координате - не показаны). Перемещение осуществляется скольжением поверхностей: . по первой координате (на чертеже - слева направо и справа налево) пяты 9 по каретке 12; по второй координате (в направлении, перпендикулярном плоскости чертежа) каретки 12 по поверхности камеры 1 (кинематическая пара винт-гайка, для зтой координаты не показаны) . Эти перемещения могут быть осзоцествлены на направляющих (например, для второй координаты направляющие 13 в виде ласточкина хвоста). Устройство работает следующим образом. Перемещение рабочего узла 7 вдоль оси штока 5 осуществляется или за счет перемещения стакана со штоком 5 (при этом сильфон 2 сжимается или растягивается), или за счет перемещения магнитов 4 и 6 со штоком 5 (если шток не имеет жесткой связи с днищем стакана 3, что зависит от конкретной конструкции исполнительного механизма). При перемещении стакана 3 вдоль оси кольцо 8 остается неподвиякным. Таким образом, осуществляется возвратно-поступательное движение рабочего органа 7. При наклоне стакана 3 относительно.корпуса 1 одновременно наклоняется и рабочий орган 7. Сферическая поверхность кольца 8 скользит по сферической поверхности пяты 9 в направлении наклона. Одновременно происходит перемещение кольца 8 вдоль стакана 3. Такой наклон может быть вьшолнен в любой плоскости, проходящей через ось симметрии стакана 3 (ось симметрии штока 5). При этом происходит изгиб сильфона 2. Так осуществляются угловые перемещения рабочего органа 7. Возможно сочетание одновременно возвратнопоступательного движения и углового перемещения рабочего органа 7 в пределах эластичных возможностей сильфона 2. Дополнительные возможности манипулирования представляет механизм перемещения вдоль двух осей, лежащих в одной плоскости, перпендикулярной оси стакана 3 (плоскости чертежа). При сохранении возможностей возвратно-поступательного и углового движений рабочего органа 7 в тех же пределах, механи зация перемещения дает возможность перемещать рабочий орган в плоскости, перпендикулярной оси стакана 3. Таким образом, зона камеры, доступная рабочему органу 7, расишряется. В предлагаемой конструкции одновременно возможны следующие перемещения рабочего органа; возврато-поступательное вдоль оси стакана 3 угловое; возвратно-поступательное вдоль стенки корпуса 1 камеры, на которой установлен ввод, в любом направлении. Причем эти перемещения могут сочетаться одновременно в любой комбинащш. Это перемещение ограничено длиной направляющих механизма перемещения и возможностями на изгиб сильфона 2, так как при перемещении каретки 12 или опорной пяты 9 происходит изгиб сильфона 2. Таким образом, поставленная цель достигнута. Расширение диапазона манипулирования произошло за счет появления возможности дополнительного перемещения рабочего органа. Технико-эконодшческая эффективность изоб ретения заключается в увеличении диапазона манипулирования, что позвбляет расширить воз можности вакуумных камер при незначительном нх усложнении. Формула изобретения Устройство ввода движения в камеру, содержащее исполнительный механизм, размещенный в стакане, герметчно присоединенном к камере с помощью снльфоиа, опорную шайбу со сферическст поверхностью, контактирующей со сферой опорной пяты, закрепленной на ка мере соосно стакану, отличающееся 1«м, что, с целью расширения диапазона манипулирования, шайба установлена с кольцевым зазором относительно внешней поверхности стакана, а опорная пята установлена иа двухкоординатном механизме перемещения в плоскости, перпендикулярной оси стакана. Источш{ки ш ормации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N 288470, кл. F 16 К 3/00, 2.Медников М. И. Вводы движения в вакууме. М., Мацршостроение, 1964, с. 89-94 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1604609A1 |
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691173C1 |
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2708648C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2709280C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2728274C1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Манипулятор | 2017 |
|
RU2671231C2 |
| Устройство для нанесения покрытия | 1979 |
|
SU793657A1 |