Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов.
Важным параметром движения обнаруженных объектов является их радиальная скорость. Зондирующий сигнал должен обеспечить возможность измерения данного параметра. Тональный сигнал обеспечивает измерение радиальной скорости обнаруженного объекта, но при этом для обеспечения классификации обнаруженного объекта по бликовой структуре должна быть обеспечена высокая разрешающая способность по дистанции, для чего следует применять тональные зондирующие сигналы малой длительности. А тональные зондирующие сигналы малой длительности имеют низкую разрешающую способность по радиальной скорости обнаруженного объекта и не позволяют обеспечить большие дальности обнаружения.
Известен активный гидролокатор с классификацией объекта (патент РФ №35474), содержащий последовательно соединенные устройство формирования псевдослучайного (ПС) зондирующего сигнала, генераторное устройство и излучающую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство разделения обработки тонального и ПС сигналов по частоте, многоканальное устройство доплеровской согласованной фильтрации ПС эхосигнала, устройство оценки радиальной скорости объекта по ПС эхосигналу и устройство определения радиальной скорости объекта, также содержащий устройство формирования тонального зондирующего сигнала и последовательно соединенные многоканальное устройство доплеровской фильтрации тонального эхосигнала и устройство оценки радиальной скорости объекта по тональному сигналу, причем выход устройства формирования тонального зондирующего сигнала соединен со вторым входом генераторного устройства, второй выход устройства разделения обработки тонального и ПС сигналов по частоте соединен со входом многоканального устройства доплеровской фильтрации тонального эхосигнала, а выход устройства оценки радиальной скорости объекта по тональному сигналу соединен со вторым входом устройства определения радиальной скорости объекта.
Недостатком этого гидролокатора является то, что для определения радиальной скорости обнаруженного объекта по псевдослучайному сложному зондирующему сигналу необходимо выполнять многоканальную согласованную фильтрацию, тональный сигнал при малых радиальных скоростях обнаруженного объекта имеет отношение сигнал/реверберация меньше, чем сложный сигнал в корень из полосы раз. Также в данном гидролокаторе излучается пачка сигналов, что приводит к увеличению мертвой зоны вблизи гидролокатора по сравнению с излучением одиночного сигнала, поскольку прием в гидролокаторе обычно осуществляется после окончания излучения всего зондирующего сигнала по синхроимпульсу. Кроме того, при большой длительности тонального зондирующего сигнала гидролокатор имеет высокую разрешающую способность по радиальной скорости, но имеет весьма низкую разрешающую способность по дистанции.
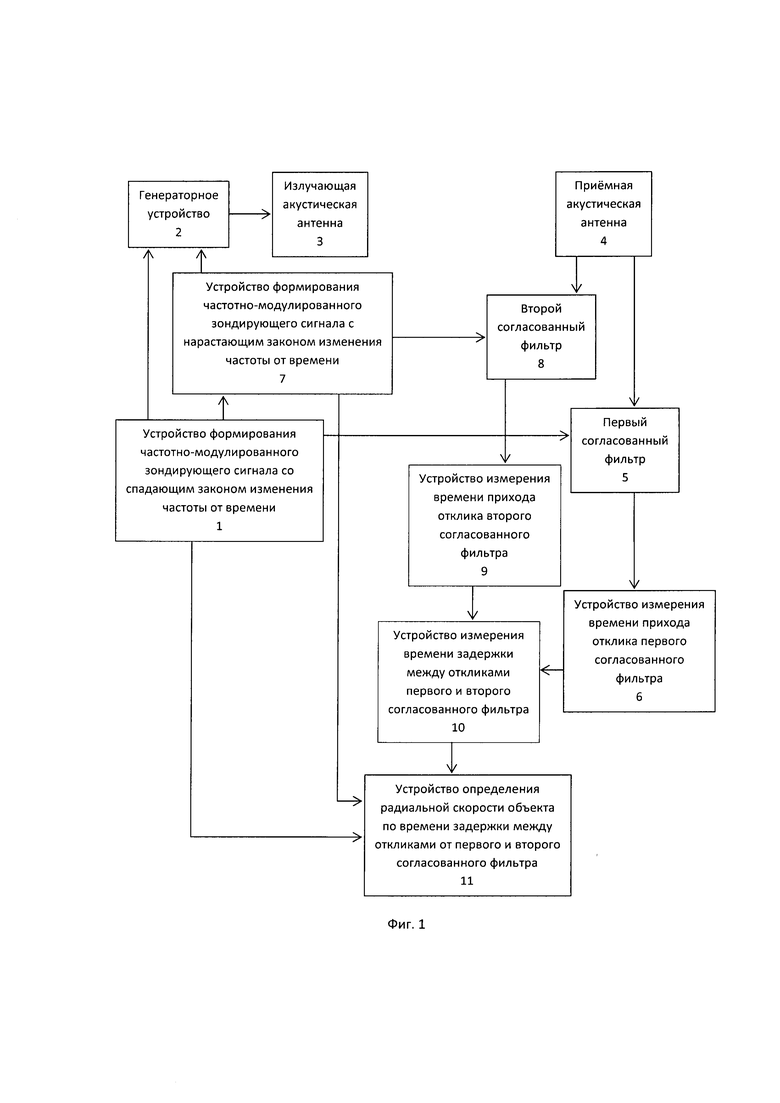
По количеству общих признаков наиболее близким аналогом предлагаемого изобретения является активный гидролокатор, описанный в статье Fangyong Wang, Shuanping Du, Wei Sun, Qiang Huang, and Jiao Su. A method of velocity estimation using composite hyperbolic frequency-modulated signals in active sonar // J. Acoust. Soc. Am. 31 (5) / 136. C. 316-312. Этот активный гидролокатор содержит (фиг. 1) последовательно соединенные устройство 1 формирования частотно-модулированного зондирующего сигнала со спадающим законом изменения частоты от времени, генераторное устройство 2 и излучающую акустическую антенну 3, также содержит последовательно соединенные приемную акустическую антенну 4, первый согласованный фильтр 5 и устройство 6 измерения времени прихода отклика первого согласованного фильтра, при этом второй выход устройства 1 соединен со вторым входом устройства 5. В состав активного гидролокатора также входят последовательно соединенные устройство 7 формирования частотно-модулированного зондирующего сигнала с нарастающим законом изменения частоты от времени, второй согласованный фильтр 8, устройство 9 измерения времени прихода отклика второго согласованного фильтра, устройство 10 измерения времени задержки между откликами первого и второго согласованного фильтра и устройство 11 определения радиальной скорости обнаруженного объекта по времени задержки между откликами от первого и второго согласованного фильтра, причем второй выход устройства 7, соединен со вторым входом устройства 2, третий выход устройства 7 соединен со вторым входом устройства 11, третий выход устройства 1 соединен с третьим входом устройства 11, второй выход антенны 4 соединен со вторым входом устройства 8, а выход устройства 6 соединен со вторым входом устройства 10.
Определение радиальной скорости обнаруженного объекта выполняется по оценке взаимного смещения откликов согласованных фильтров каждого сигнала пачки из двух частотно-модулированных (ЧМ) сигналов.
Недостатком этого гидролокатора-прототипа является излучение пачки зондирующих сигналов, что приводит к повышению, необходимости параллельной работы двух согласованных фильтров и обеспечения их синхронизации, а также является необходимость обеспечения более широкой рабочей полосы частот гидролокатора при излучении пачки разнесенных по частоте ЧМ сигналов, либо, при излучении ЧМ сигналов пачки на одной несущей частоте, повышенный уровень реверберационной помехи в полосе частот излученных сигналов.
Задачей изобретения является обеспечение возможности определения радиальной скорости обнаруженного объекта по одиночному частотно-модулированному сигналу.
Технический результат изобретения заключается в реализации процедуры определения радиальной скорости обнаруженного объекта при уменьшении мертвой зоны вблизи гидролокатора и оптимизации нагрузки на аппаратуру гидролокатора, путем излучения одиночного частотно-модулированного сигнала.
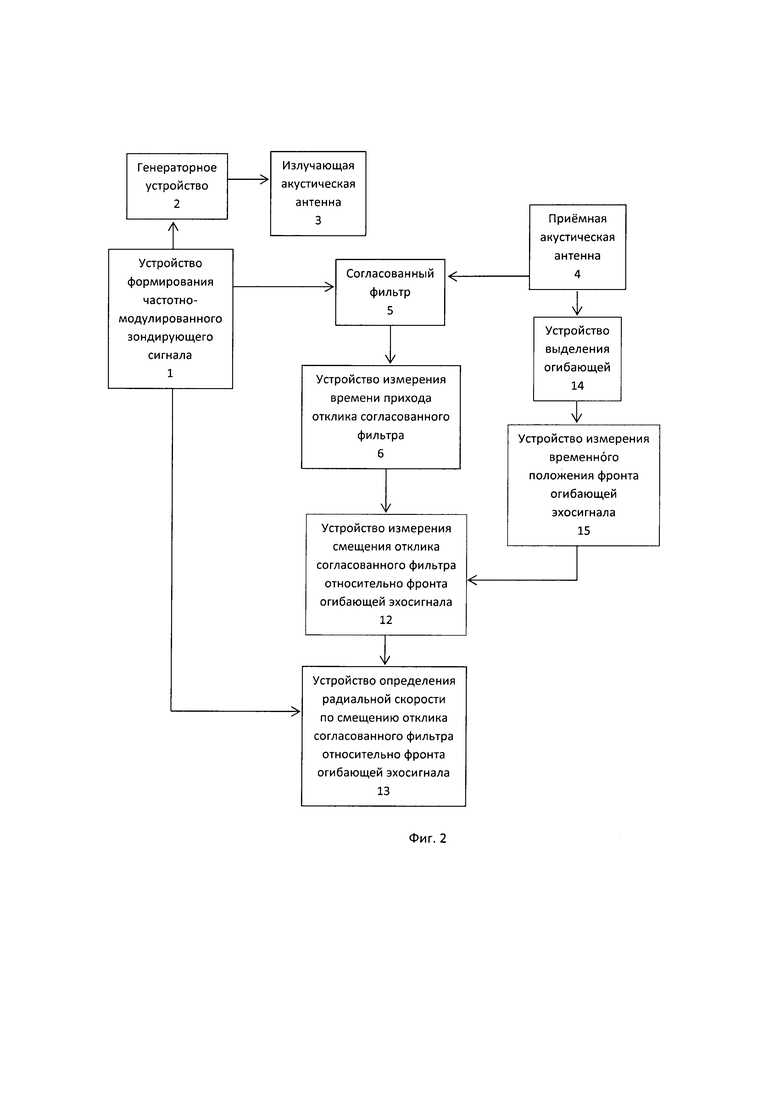
Для достижения данного технического результата в активный гидролокатор, содержащий последовательно соединенные устройство формирования частотно-модулированного зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, согласованный фильтр и устройство измерения времени прихода отклика согласованного фильтра, при этом второй выход устройства формирования частотно-модулированного зондирующего сигнала соединен со вторым входом согласованного фильтра, введены новые признаки, а именно, введены последовательно соединенные устройство выделения огибающей, устройство измерения временного положения фронта огибающей эхосигнала, устройство измерения смещения отклика согласованного фильтра относительно фронта огибающей эхосигнала и устройство определения радиальной скорости по смещению отклика согласованного фильтра относительно фронта огибающей эхосигнала, первый вход которого соединен со выходом устройства определения смещения отклика согласованного фильтра относительно фронта огибающей эхосигнала, а второй вход соединен с третьим выходом устройства формирования частотно-модулированного зондирующего сигнала, при этом выход устройства измерения времени прихода отклика согласованного фильтра соединен со вторым входом устройства определения смещения отклика согласованного фильтра относительно фронта огибающей эхосигнала, а второй выход приемной акустической антенны соединен со входом устройства выделения огибающей.
Указанный технический результат достигается за счет того, что при приеме одиночного частотно-модулированного эхосигнала выполняется измерение смещения максимума отклика согласованного (с опорным сигналом) фильтра относительно фронта амплитудной огибающей эхосигнала на входе согласованного фильтра, по которой выполняется определение радиальной скорости обнаруженного объекта. Использование такой оценки дает возможность применять в гидролокаторе одиночные частотно-модулированные зондирующие сигналы, что приведет к снижению нагрузки на систему обработки принимаемых эхосигналов вследствие того, что для одиночных частотно-модулированных сигналов достаточно одного согласованного фильтра, а также приведет к уменьшению мертвой зоны вблизи гидролокатора вследствие снижения общей длительности излучения сигналов. Также применение одиночных частотно-модулированных зондирующих сигналов снижает требования к излучающему тракту. Данный технический результат получается при совместной работе вновь введенных устройств, связей между ними и связей этих устройств с другими устройствами гидролокатора.
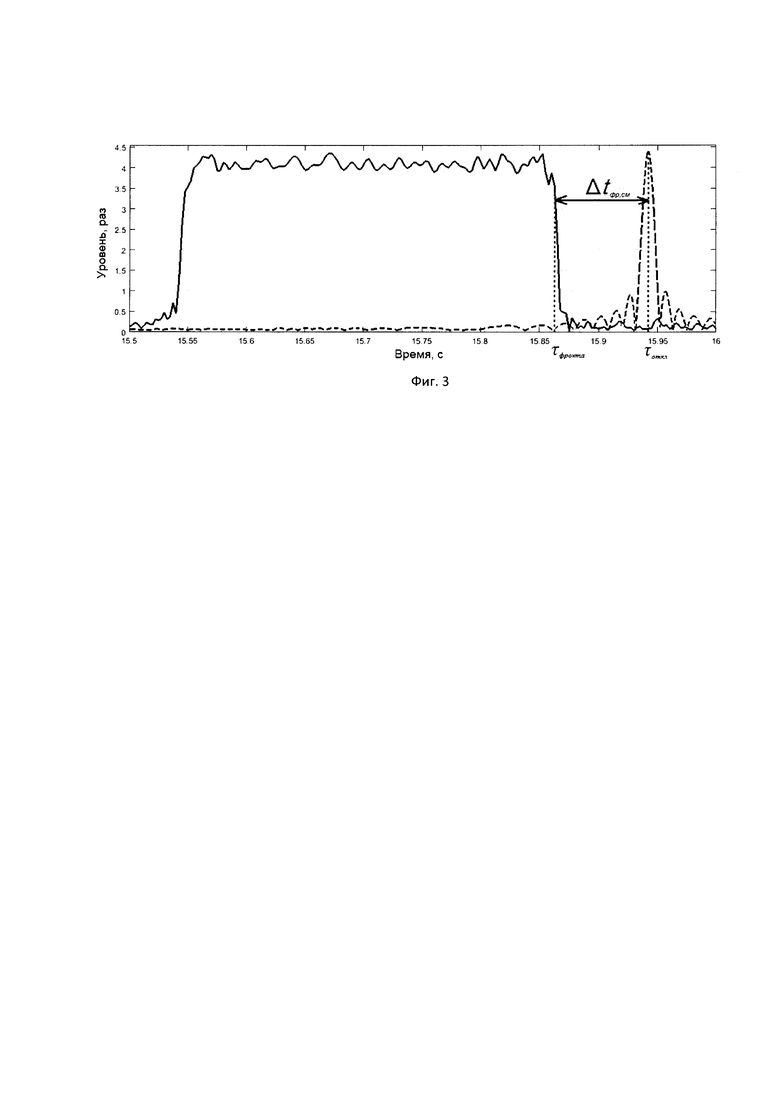
Сущность изобретения поясняется фиг. 1, фиг. 2 и фиг. 3. На фиг. 1 приведена устройство-схема прототипа активного гидролокатора, на фиг. 2 - устройство-схема предложенного активного гидролокатора. На фиг. 3 представлен отклик согласованного фильтра на эхосигнал от объекта с ненулевой радиальной скоростью (штриховая линия) и огибающая данного эхосигнала на входе согласованного фильтра (сплошная линия).
Активный гидролокатор (фиг. 2) содержит последовательно соединенные устройство 1 формирования частотно-модулированного зондирующего сигнала, генераторное устройство 2 и излучающую акустическую антенну 3. Активный гидролокатор также содержит последовательно соединенные приемную акустическую антенну 4, согласованный фильтр 5, устройство 6 измерения времени прихода отклика согласованного фильтра устройство 12 измерения смещения отклика согласованного фильтра относительно фронта огибающей эхосигнала и устройство 13 измерения радиальной скорости по смещению отклика согласованного фильтра относительно фронта огибающей эхосигнала, а также последовательно соединенные устройство 14 выделения огибающей и устройство 15 измерения временного положения фронта огибающей эхосигнала, при этом второй выход антенны 4 соединен со входом устройства 14, второй выход устройства 1 соединен со вторым входом согласованного фильтра 5, третий выход устройства 1 соединен со вторым входом устройства 13, а выход устройства 15 соединен со вторым входом устройства 12.
Практическое исполнение устройств, входящих в изобретение, известно из практики гидроакустики и реализуется на основе применения цифровых устройств.
Устройство 6, 12, 13, 14, и 15 могут быть реализованы с применением микропрограммных дискретных устройств, см. например, книгу Проектирование импульсных и цифровых устройств радиотехнических систем. /Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; Под ред. Ю.М. Казаринова. - М.: Высш. шк., 1185. С. 4, 27, 31, 3 и Цифровые радионавигационные устройства / В.В. Барашенков, А.Е. Лутченко, Е.М. Скороходов и др.; под ред. В.Б. Смолова. М.: Сов. радио, 1180. С. 116-130.
Работа устройства осуществляется следующим образом.
Устройство 1 формирует частотно-модулированный зондирующий сигнал, который излучается в воду излучающей акустической антенной 3 с помощью генераторного устройства 2. Отраженные от объекта эхосигналы с выхода приемной акустической антенны 4 поступают на устройство 5 и 14. На другой вход устройства 5 из устройства 1 поступает опорный сигнал, необходимый для согласованной фильтрации частотно-модулированных эхосигналов. С выхода устройства 5, после согласованной фильтрации частотно-модулированного эхосигнала сигнальные процессы поступают на вход устройства 6. В устройстве 6 выполняется измерение времени (тоткл) прихода отклика согласованного фильтра эхосигнала. При этом данное измерение производится относительно момента времени, соответствующего концу излучения зондирующего сигнала. С выхода устройства 6 тоткл поступает на вход устройства 12. В устройстве 14 при этом выполняется выделение огибающей принятого эхосигнала, которая поступает в устройство 15, где выполняется измерение временного положения фронта огибающей эхосигнала (тфронта) относительно времени (при достаточном отношении сигнал/помеха), соответствующего концу излучения зондирующего сигнала. С выхода устройства 15 тфронта поступает на другой вход устройства 12, где выполняется измерение смещения отклика согласованного фильтра относительно фронта огибающей эхосигнала:
Δtфр.см=τоткл-τфронта,
Полученная в устройстве 12 величина Δtфр.см поступает на вход устройства 13. В устройстве 13 выполняется определение радиальной скорости обнаруженного объекта по смещению отклика согласованного фильтра относительно фронта огибающей с учетом параметров (f0, F и T) сформированного в устройстве 1 зондирующего сигнала:
где f0 - несущая частота частотно-модулированного зондирующего сигнала; с - скорость звука в воде; Т - длительность частотно-модулированного зондирующего сигнала; F - ширина полосы частотно-модулированного зондирующего сигнала.
Использование устройств 12, 13, 14 и 15, а также связи этих новых устройств между собой и с известными устройствами активного гидролокатора обеспечивают определение радиальной скорости обнаруженного объекта по одиночному частотно-модулированному сигналу.
Для иллюстрации работы заявленного активного гидролокатора ниже приведен пример определения радиальной скорости обнаруженного объекта.
На фиг. 3 сплошной линией представлена огибающая частотно-модулированного эхосигнала на входе согласованного фильтра и штриховой линией - отклик согласованного фильтра на данный эхосигнал. Также на фиг. 3 пунктирными вертикальными линиями показаны времена тфронта и тоткл, а также показано время смещения отклика согласованного фильтра относительно фронта огибающей эхосигнала (Δtфр.см). В данном случае эхосигнал был смоделирован с радиальной скоростью 7,4 м/с, с использованием устройств 6 и 15 определены величины тфронта=4,86 с и тоткл=4,94 с, с использованием устройства 12 получено: Δtфр.см=тоткл - тфронта=0.08 с. Радиальная скорость обнаруженного объекта определена в устройстве 13:
что говорит о хорошем совпадении результатов.
Использование одиночного зондирующего сигнала вместо пачки из двух зондирующих сигналов приводит к уменьшению мертвой зоны вблизи гидролокатора в 2 раза. В данном случае мертвая зона будет составлять:  при использовании пачки из двух зондирующих сигналов мертвая зона была бы 480 м.
при использовании пачки из двух зондирующих сигналов мертвая зона была бы 480 м.
Таким образом, поставленная задача по обеспечению возможности определения радиальной скорости обнаруженного объекта по одиночному частотно-модулированному сигналу успешно решается.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2015 |
|
RU2590226C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2545326C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2543674C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2014 |
|
RU2553730C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРИЧЕСКОГО ТРАКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2626068C2 |
| ВПЕРЕДСМОТРЯЩИЙ ГИДРОЛОКАТОР С ПОВЫШЕННЫМ РАЗРЕШЕНИЕМ ПО ДАЛЬНОСТИ | 2023 |
|
RU2802295C1 |
| ВПЕРЕДСМОТРЯЩИЙ ГИДРОЛОКАТОР ГЛУБОКОВОДНОГО НОСИТЕЛЯ | 2019 |
|
RU2699938C1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2009 |
|
RU2408897C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов. Задачей изобретения является обеспечение возможности определения радиальной скорости обнаруженного объекта по одиночному частотно-модулированному сигналу. Технический результат изобретения заключается в реализации процедуры определения радиальной скорости обнаруженного объекта при уменьшении мертвой зоны вблизи гидролокатора и оптимизации нагрузки на аппаратуру гидролокатора путем излучения одиночного частотно-модулированного сигнала. 3 ил.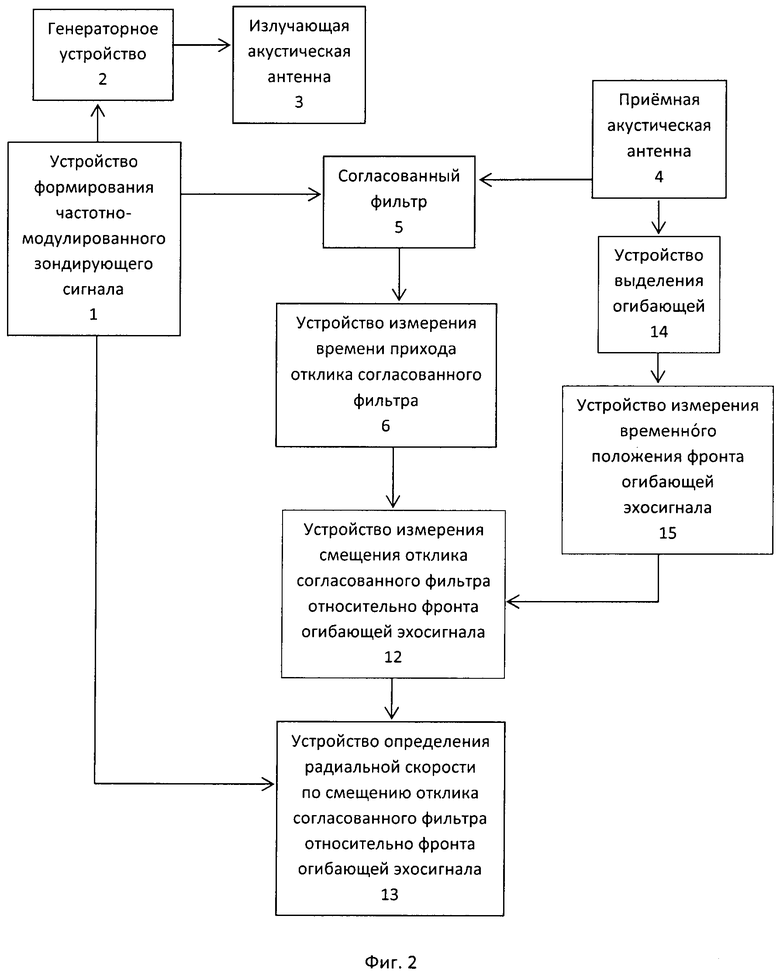
Активный гидролокатор, содержащий последовательно соединенные устройство формирования частотно-модулированного зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, согласованный фильтр и устройство измерения времени прихода отклика согласованного фильтра, при этом второй выход устройства формирования частотно-модулированного зондирующего сигнала соединен со вторым входом согласованного фильтра, отличающийся тем, что в него введены последовательно соединенные устройство выделения огибающей, устройство измерения временного положения фронта огибающей эхосигнала, устройство измерения смещения отклика согласованного фильтра относительно фронта огибающей эхосигнала и устройство определения радиальной скорости по смещению отклика согласованного фильтра относительно фронта огибающей эхосигнала, первый вход которого соединен со выходом устройства определения смещения отклика согласованного фильтра относительно фронта огибающей эхосигнала, а второй вход соединен с третьим выходом устройства формирования частотно-модулированного зондирующего сигнала, при этом выход устройства измерения времени прихода отклика согласованного фильтра соединен со вторым входом устройства определения смещения отклика согласованного фильтра относительно фронта огибающей эхосигнала, а второй выход приемной акустической антенны соединен со входом устройства выделения огибающей.
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2543674C1 |
| Wei Li et al | |||
| Active sonar detection in reverberation via signal subspace extraction algorithm | |||
| Hiddawi publishing corporation | |||
| EURASIP journal wireless communications and networking, Volume 2010, article ID 981045, 10 PAGES | |||
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2543674C1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ ЕМКОСТЕЙ | 1950 |
|
SU90574A1 |
| Способ прессования труб с внутренними ребрами и утолщениями | 1957 |
|
SU114169A1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2545326C1 |

