Изобретение относится к области морской техники и может быть использовано в качестве устройства первичного обнаружения малошумных морских объектов в системах, предназначенных для защиты акваторий от несанкционированного проникновения морских объектов в районах охраняемых гидротехнических сооружений (буровые вышки, приливные станции, морские станции экологического мониторинга, и т.д.).
Известны морские комплексы, которые предназначены для защиты морских рубежей и акваторий от проникновения малошумных объектов, такие как широкополосная якорная мина Мк 60 «Captor» (см. Е.Я. Литвиненко, Г.Ю. Илларионов, В.В. Сидоренков. Характер современной минной угрозы и боевые возможности морского минного оружия. Монография: - С.-Петербург: Судостроение, 2005 - стр. 32-33), состоящая на вооружении ВМФ США, широкополосная самонаводящаяся миноторпеда CSM (см. Е.Я. Литвиненко, Г.Ю. Илларионов, В.В. Сидоренков. Характер современной минной угрозы и боевые возможности морского минного оружия. Монография: - С.-Петербург: Судостроение, 2005 - стр. 83-84), состоящая на вооружении ВМФ Италии. Гидроакустическая пассивно-активная аппаратура обнаружения и классификации морских объектов этих комплексов является наиболее близким аналогом заявляемого устройства и содержит канал предварительного обнаружения и классификации, реагирующий на первичное гидроакустическое поле морских объектов, и активный канал обнаружения и пеленгования, реагирующий на вторичное гидроакустическое поле.
В качестве прототипа выбрано «Устройство гидроакустического наблюдения за подводной сигнально-помеховой обстановкой» (см. патент РФ №2309872).
Прототип содержит пассивный канал классификации, маломощный активный канал обнаружения, активный канал пеленгования. Все перечисленные элементы этого устройства входят и в состав заявляемого устройства.
Прототип работает следующим образом. При включении питания маломощный активный канал обнаружения и пассивный канал классификации работают в режиме первичного обнаружения объектов. В этом режиме, с определенной скважностью, определяемой временем кругового обзора пространства в горизонтальной плоскости в пределах 360°, формируется рабочий цикл маломощного активного канала обнаружения, который состоит из процесса излучения зондирующей посылки и процесса обработки гидроакустических сигналов в рабочем стробе. Если в активном режиме происходит обнаружение отраженного от объекта гидроакустического сигнала, то принимается решение о наличии в зоне обнаружения объекта-нарушителя. В этом случае в решающем устройстве определяется пространственный сектор, в котором произошло обнаружение объекта-нарушителя и на выходе решающего устройства формируется управляющий сигнал на включение активного канала пеленгования. Если активный канал пеленгования подтвердит наличие в зоне обнаружения подводного объекта-нарушителя, то принимается окончательное решение о наличии в охраняемой зоне объекта-нарушителя.
Если на протяжении рабочего строба маломощного активного канала обнаружения не принимается решение о наличии в зоне обнаружения объекта-нарушителя, то на выходе решающего устройства управляющий сигнал на включение активного канала пеленгования не вырабатывается и возобновляется формирование рабочего цикла маломощного активного канала обнаружения.
Особенностью функционирования прототипа является то, что маломощный активный канал обнаружения работает постоянно.
Техническим результатом заявляемого устройства является повышение скрытности функционирования систем, предназначенных для защиты акваторий от несанкционированного проникновения морских объектов в районах охраняемых гидротехнических сооружений и увеличение срока их функционирования за счет понижения энергопотребления.
Указанный технический результат достигается за счет того, что между пассивным каналом обнаружения и классификации и маломощным активным каналом обнаружения дополнительно включен канал управления функционированием маломощного активного канала, разрешающий или запрещающий его работу в зависимости от уровня окружающих гидроакустических шумов.
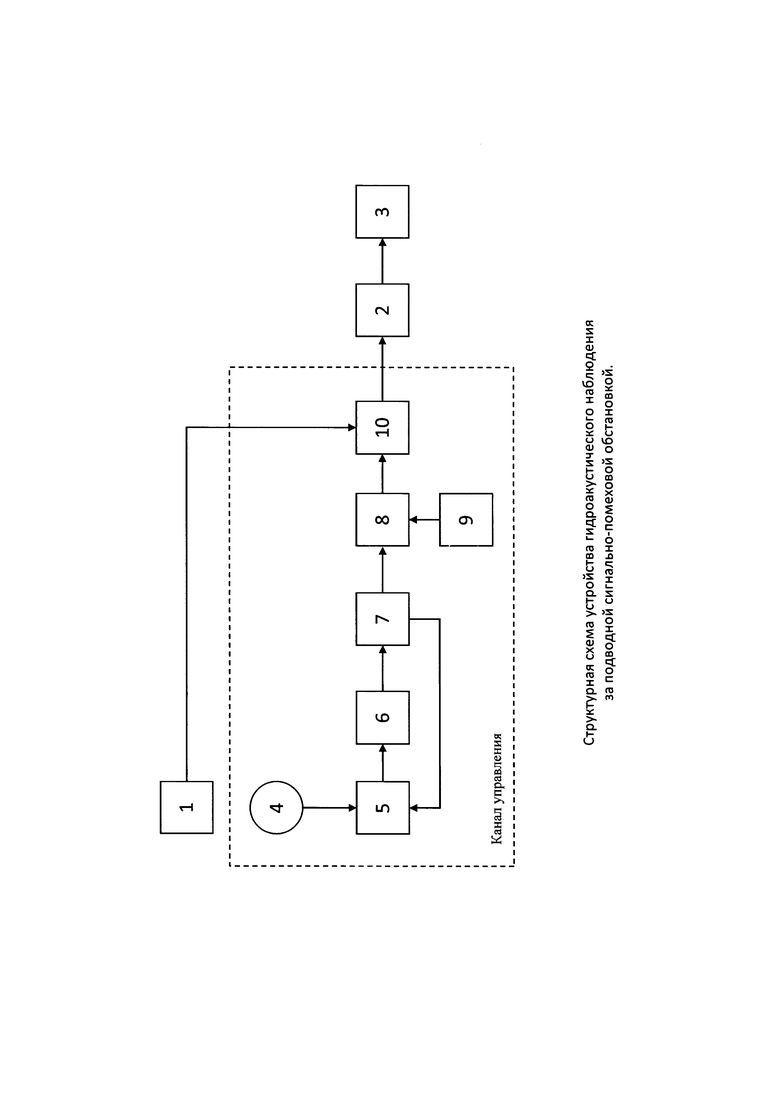
На фигуре приведена «Структурная схема устройства гидроакустического наблюдения за подводной сигнально-помеховой обстановкой». На схеме показаны: пассивный канал обнаружения и классификации 1, маломощный активный канал обнаружения 2, активный канал пеленгования 3, канал управления, включающий гидроакустическую приемную антенну 4, частотно-избирательный регулируемый усилитель 5, формирователь модуля сигнала 6, блок автоматической регулировки усиления 7, компаратор 8, генератор опорного сигнала 9, двухвходовое логическое устройство 10.
Заявляемое устройство работает следующим образом. При включении питания работают только пассивный канал обнаружения 1 и канал управления. С выхода приемной антенны 4 сигнал поступает на вход регулируемого усилителя 5, в котором сигнал подвергается усилению и частотной фильтрации. С выхода усилителя 5 сигнал поступает на вход формирователя модуля сигнала 6. Модуль сигнала поступает в блок автоматической регулировки усиления 7, в котором на основании накопленных значений модуля сигнала формируется управляющий сигнал для регулировки усилителя 5. Далее управляющий сигнал с выхода блока автоматической регулировки усиления 7 поступает на вход компаратора 8, сравнивающего значение управляющего сигнала с опорным сигналом, соответствующим определенному уровню гидроакустических шумов моря, сгенерированным в генераторе опорного сигнала 9. Если управляющий сигнал превышает опорный сигнал, на выходе компаратора 8 вырабатывается сигнал срабатывания канала управления. Этот сигнал поступает на первый вход логического устройства 10, на второй вход логического устройства поступает сигнал с выхода пассивного канала обнаружения 1.
Логическое устройство 10 работает следующим образом. При наличии сигнала срабатывания канала управления и отсутствии сигнала о срабатывании пассивного канала обнаружения 1, логическое устройство 10 вырабатывает сигнал, разрешающий функционирование маломощного активного канала 2 в режиме первичного обнаружения объектов. При наличии сигнала срабатывания пассивного канала обнаружения 1, логическое устройство 10 также вырабатывает сигнал, разрешающий функционирование маломощного активного канала 2 в режиме обнаружения. При фиксации в маломощном активном канале 2 отраженного от объекта эхо-сигнала уточняется сектор, в котором произошло обнаружение эхо-сигнала, и маломощный активный канал 2 формирует сигнал на включение активного канала пеленгования 3, который определяет
местоположение и параметры движения морского объекта.
При отсутствии эхо-сигнала и наличии сигнала о срабатывании канала управления, логическое устройство 10 вырабатывает сигнал, разрешающий функционирование маломощного активного канала в режиме первичного обнаружения объектов. При отсутствии эхо-сигнала и отсутствии сигнала о срабатывании канала управления, логическое устройство 10 вырабатывает сигнал, запрещающий функционирование маломощного активного канала.
К моменту заявления разработан и изготовлен макет описываемого устройства гидроакустического наблюдения за подводной сигнально-помеховой обстановкой и проводятся его натурные испытания.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ПОДВОДНОЙ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКОЙ | 2006 |
|
RU2309872C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ПРИ ИХ ВТОРЖЕНИИ В ОХРАНЯЕМУЮ ЗОНУ | 2013 |
|
RU2559701C2 |
| Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях | 2019 |
|
RU2715158C1 |
| СПОСОБ ПАССИВНОГО АВТОМАТИЧЕСКОГО ГИДРОАКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ МОРСКИХ ОБЪЕКТОВ | 2017 |
|
RU2670188C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ ОБНАРУЖИТЕЛЬ ДВИЖУЩЕГОСЯ МОРСКОГО ОБЪЕКТА | 2014 |
|
RU2563140C1 |
| СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538440C2 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| Гидроакустическая станция контроля подводной обстановки | 2019 |
|
RU2724145C1 |
| Способ пространственной ориентации системы нелетального воздействия | 2022 |
|
RU2801544C1 |
| Интерференционный обнаружитель движущегося подводного морского объекта с медианной фильтрацией сигнала | 2023 |
|
RU2809350C1 |
Использование: изобретение относится к области морской техники и может быть использовано в качестве устройства первичного обнаружения малошумных морских объектов в системах, предназначенных для защиты акваторий от несанкционированного проникновения морских объектов в районах охраняемых гидротехнических сооружений (буровые вышки, приливные станции, морские станции экологического мониторинга и т.д.). Сущность: между пассивным каналом обнаружения и классификации и маломощным активным каналом обнаружения дополнительно включен канал управления функционированием маломощного активного канала, разрешающий или запрещающий его работу в зависимости от уровня окружающих гидроакустических шумов. Технический результат: повышение скрытности функционирования систем, предназначенных для защиты акваторий от несанкционированного проникновения морских объектов в районах охраняемых гидротехнических сооружений и увеличение срока их функционирования за счет понижения энергопотребления. 1 ил.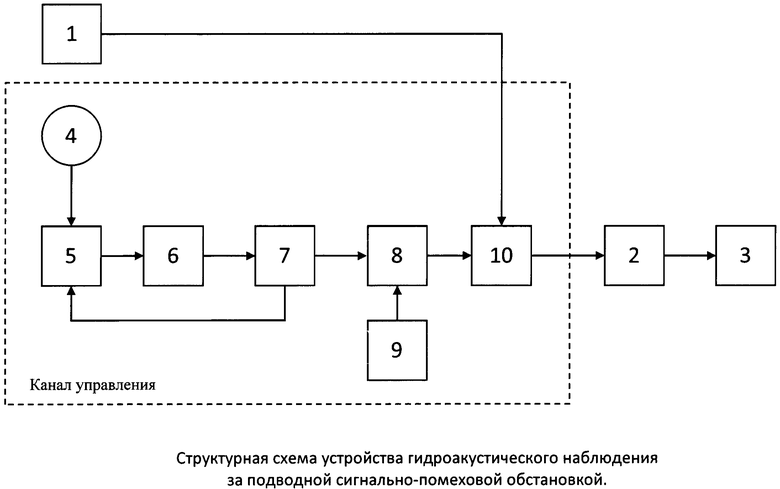
Устройство гидроакустического наблюдения за подводной сигнально-помеховой обстановкой, содержащее гидроакустическую пассивно-активную аппаратуру обнаружения и классификации морских объектов и маломощный активный канал обнаружения, отличающееся тем, что между пассивным каналом аппаратуры обнаружения и классификации морских объектов и маломощным активным каналом дополнительно включен канал управления функционированием маломощного активного канала, состоящий из последовательно соединенных гидроакустической приемной антенны, полосового частотно-избирательного регулируемого усилителя, формирователя модуля сигнала, блока автоматической регулировки усиления, генератора опорного сигнала, компаратора и двухвходового логического устройства, первый вход которого подключен к выходу компаратора, второй - к выходу пассивного канала обнаружения, а выход логического устройства подключен к входу маломощного активного канала обнаружения.
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море | 2020 |
|
RU2739000C1 |
| Способ обнаружения шумящих, движущихся в море объектов | 2017 |
|
RU2653585C1 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ПОДВОДНОЙ СИГНАЛЬНО-ПОМЕХОВОЙ ОБСТАНОВКОЙ | 2006 |
|
RU2309872C1 |
| Устройство обнаружения широкополосных полигармонических сигналов на фоне аддитивной помехи | 2017 |
|
RU2700798C2 |
| СПОСОБ ПАССИВНОГО АВТОМАТИЧЕСКОГО ГИДРОАКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ МОРСКИХ ОБЪЕКТОВ | 2017 |
|
RU2670188C1 |
| US 5909409 A1, 01.06.1999. | |||

