Изобретение относится к области военной техники, а именно к зенитному ракетному оружию.
Известен механизм перевода рукоятки привода управления запуском ракеты (см. патент РФ N 2084804, кл. F41F 3/04, публ. 20.07.97 г.), содержащий установленный в корпусе соосно с рукояткой привода управления запуском валик, на котором снаружи корпуса закреплен с возможностью зацепления с рукояткой привода рычаг, а внутри корпуса на валике закреплен соединенный тросом с пружиной сжатия-растяжения шкив, взаимодействующий с подпружиненной защелкой, соединенной гибкой связью с гашеткой.
Известен также механизм перевода рукоятки привода управления запуском ракеты (см. патент РФ N 2088877, кл. F41A 23/34, публ. 27.08.97 г.), принятый за прототип. Механизм содержит откидной корпус с установленными на нем пружинным двигателем и поворотной частью, расположенной соосно оси поворота рукоятки привода управления запуском ракеты. Поворотная часть выполнена в виде размещенных на оси корпуса двух торцевых поворотных крышек, одна из которых снабжена рукояткой взвода, а другая имеет вырез для рукоятки привода и выступ, взаимодействующий с подпружиненным шепталом. Пружинный двигатель выполнен в виде пружины кручения, концы которой закреплены на торцевых крышках. Механизм приводится в действие вручную оператором нажатием на спусковой рычаг.
Недостатками прототипа является наличие массивного корпуса, который необходимо поворачивать и закреплять при подготовке механизма к работе, не очень удобный процесс заведения рукоятки привода управления запуском ракеты, а также преодоление значительного момента кручения при повороте рукоятки в рабочее положение одним движением, отсутствие блокировки от случайного срабатывания при использовании механизма на носителях, подверженных вибрациям и случайным ударным нагрузкам.
Предлагаемым изобретением решается задача повышения эксплуатационных характеристик механизма перевода рукоятки привода управления запуском ракеты.
Технический результат заключается в упрощении подготовки механизма к работе, повышении надежности работы механизма, снижении массы, а также возможности его использования для дистанционного запуска зенитных ракет.
Указанный технический результат достигается тем, что в механизме перевода рукоятки привода управления запуском ракеты индивидуального использования, содержащем корпус с установленными на нем пружинным двигателем и поворотной частью, соединенной с рукояткой взвода и расположенной соосно оси поворота рукоятки привода управления запуском ракеты, новым является то, что поворотная часть выполнена в виде зубчатого кольца, соединенного с рукояткой взвода и установленного с возможностью поворота относительно корпуса с помощью тел качения, размещенных в желобах, выполненных на противолежащих цилиндрических поверхностях корпуса и зубчатого кольца, зубчатое кольцо имеет выступ для зацепления с рукояткой привода управления запуском ракеты, а корпус имеет упор, ограничивающий поворот зубчатого колеса при возврате в исходное положение, пружинный двигатель выполнен в виде закрепленного на корпусе основания с крышкой, внутри которого установлен вал с шестерней на конце, которая размещена в корпусе и взаимодействует с зубчатым кольцом, на валу установлено храповое колесо и закреплен конец ленточной пружины, второй конец которой закреплен на внутренней поверхности основания, в крышке установлен подпружиненный храповик в виде двуплечего рычага, одно плечо которого связано с храповым колесом, а другое плечо является опорным и выполнено выступающим за пределы крышки, механизм дополнительно снабжен блокировочным устройством, установленным на наружной поверхности крышки пружинного двигателя, и состоит из электромагнита с толкателем и подпружиненного блокирующего рычага, размещенного на крышке и взаимодействующего с толкателем электромагнита и выступающим опорным плечом храповика.
Использование в поворотной части механизма зубчатого кольца с рукояткой взвода, размещение его в корпусе кольцевой формы и возможность поворота зубчатого кольца в корпусе с помощью тел качения позволяет осуществлять перевод рукоятки привода управления запуском ракеты в зацепление с выступом зубчатого колеса через внутреннее пространство в корпусе механизма, что снижает массу корпуса и облегчает процесс перевода рукоятки привода управления запуском ракеты. Наличие в конструкции храпового механизма облегчает процесс перевода рукоятки взвода в рабочее положение, т.е. рукоятку можно взводить за несколько приемов, преодолевая усилие ленточной пружины. Выполнение подвижной части механизма в форме зубчатого кольца позволяет использовать инерционные свойства подвижной части для преодоления усилия на рукоятке привода управления запуском ракеты, что повышает надежность срабатывания механизма перевода рукоятки привода. Введение в конструкцию блокировочного устройства предохраняет от случайного срабатывания пружинного двигателя при использовании механизма на носителях, подверженных вибрациям и случайным ударным нагрузкам, т.е. повышается надежность работы механизма в целом. Конструкция пружинного двигателя позволяет использовать электроспуск для дистанционного запуска зенитных ракет.
Сравнение заявляемого изобретения с прототипом позволило установить его соответствие критерию "новизна".
При анализе уровня техники в данной области было также выявлено, что заявляемая совокупность существенных признаков обеспечивает предлагаемому изобретению соответствие критерию "изобретательский уровень".
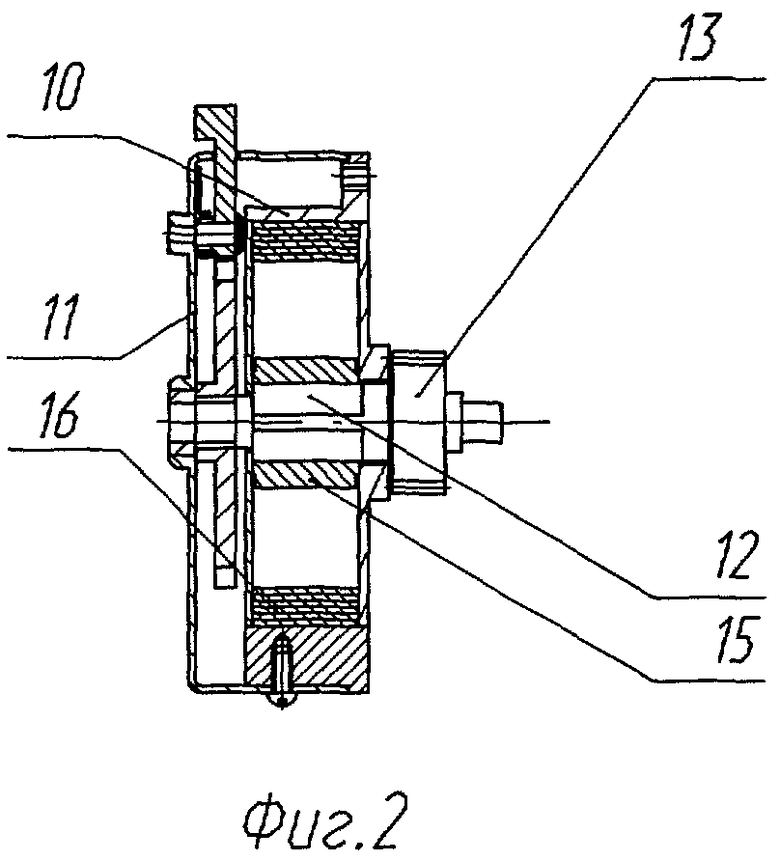
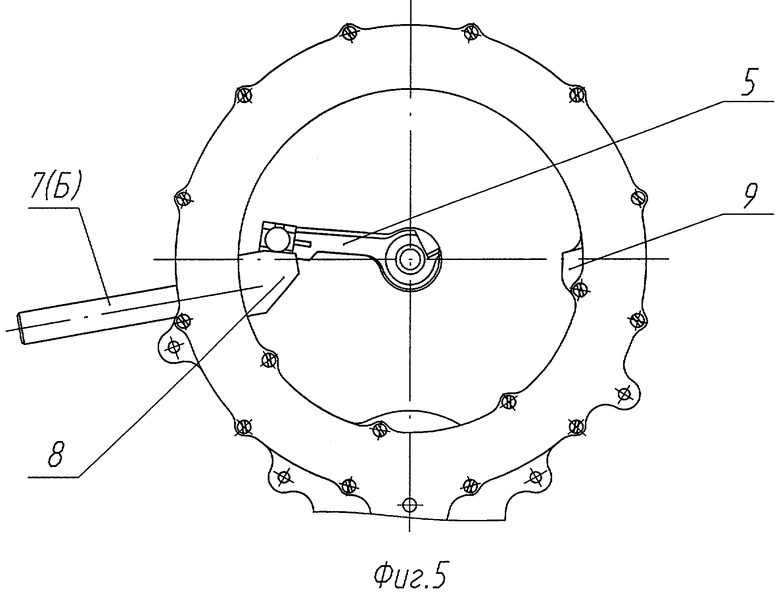
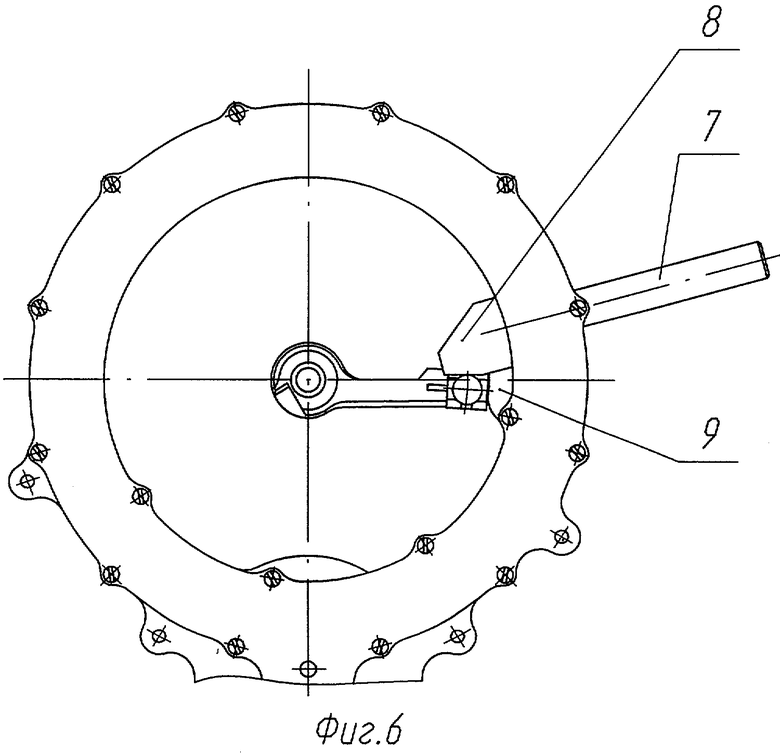
Сущность изобретения поясняется чертежами, где на фиг.1 показан механизм перевода рукоятки привода управления запуском ракеты, вид со стороны пружинного двигателя; на фиг.2 - пружинный двигатель, вид сбоку; на фиг.3 - пружинный двигатель, вид спереди (без крышки); на фиг.4 - механизм перевода рукоятки привода управления запуском ракеты, вид сбоку; на фиг.5 - положение механизма во взведенном состоянии, вид В; на фиг.6 - положение механизма после срабатывания, вид В.
Механизм перевода рукоятки привода управления запуском ракеты состоит из корпуса 1 кольцевой формы, закрытого крышкой 2 с помощью винтов 3 и жестко закрепляемого на кронштейне основания пусковой установки (на чертежах не показан). В корпусе установлена поворотная часть, выполненная в виде зубчатого кольца 4, расположенного соосно оси поворота рукоятки 5 привода управления запуском ракеты и установленного с возможностью поворота относительно корпуса 1 с помощью тел качения 6, размещенных в желобах, выполненных на противолежащих цилиндрических поверхностях корпуса 1 и зубчатого кольца 4. Зубчатое кольцо 4 имеет рукоятку 7 взвода и выступ 8 для зацепления с рукояткой 5 привода управления запуском ракеты, а корпус 1 имеет упор 9, ограничивающий поворот зубчатого кольца 4 при возврате в исходное положение. На корпусе 1 закреплен пружинный двигатель, выполненный в виде основания 10 с крышкой 11, внутри которого установлен вал 12 с шестерней 13 на конце. Шестерня 13 размещена в корпусе 1 с возможностью взаимодействия с зубчатым кольцом 4. На валу 12 установлено храповое колесо 14 и валик 15, на котором закреплен конец ленточной пружины 16, второй конец которой закреплен на внутренней поверхности основания 10. В крышке 11 установлен подпружиненный пружиной 17 храповик 18, выполненный в виде двуплечего рычага, одно плечо 19 которого взаимодействует с храповым колесом 14, а другое плечо 20 является опорным и выполнено выступающим за пределы крышки 11. На наружной поверхности крышки 11 пружинного двигателя установлен кронштейн 21, на котором размещено блокировочное устройство, состоящее из электромагнита 22 с толкателем 23 и подпружиненного пружиной 24 блокирующего рычага 25, на оси которого закреплен флажок 26, и стопор 27, взаимодействующий с выступающим опорным плечом 20 храповика. Блокирующий рычаг 25 взаимодействует с толкателем 23 электромагнита.
На кронштейне 28 (показан фрагмент) основания пусковой установки с помощью гайки 29 закреплен электроспуск 30. В гайке 29 размещен подпружиненный пружиной 31 толкатель 32, взаимодействующий с опорным плечом 20 храповика. Электроспуск 30 и электромагнит 22 блокировочного устройства через кабели с разъемом соединены с электрической схемой управления механизмом перевода рукоятки привода управления запуском ракеты.
Для приведения механизма перевода рукоятки привода управления запуском ракеты в рабочее положение необходимо зубчатое кольцо 4 с рукояткой 7 взвода перевести из исходного положения А (фиг.1) вручную в крайнее переднее положение Б (фиг.5), предварительно разблокировав храповик 18 (фиг.3) поворотом стопора 27 при помощи флажка 26. При повороте зубчатое кольцо 4 с рукояткой 7 взвода через зубчатое зацепление с шестерней 13 поворачивает вал 12 пружинного двигателя. При этом вал с шестерней совершает около пяти оборотов, закручивая ленточную пружину 16. Во взведенном состоянии ленточную пружину удерживает храповик 18 через храповое колесо 14. Конструкция пружинного двигателя позволяет осуществлять перевод в крайнее положение зубчатого кольца 4 с рукояткой взвода в несколько приемов. Далее необходимо заблокировать храповик 18 стопором 27, отпустив флажок 26. Установить рукоятку 5 (фиг.5) привода управления запуском ракеты в рабочее положение, расположив ее перед выступом 8 зубчатого колеса 4 (фиг.5).
При подаче рабочего напряжения срабатывает электромагнит 22 блокировочного устройства (фиг.1), который своим толкателем 23 поворачивает рычаг 25 со стопором 27 и разблокирует храповик 18. Через 0,5 секунды (обеспечивается электрической схемой управления) срабатывает электроспуск 30 (фиг.1), который своим толкателем 32 поворачивает храповик 18, освобождает храповое колесо 14 и ленточную пружину 16. Ленточная пружина 16, разворачиваясь, приводит в движение через вал 12 с шестерней 13 зубчатое кольцо 4 с рукояткой 7 взвода и входящую с ней в зацепление рукоятку 5 привода управления запуском ракеты, продолжающееся до упора выступа 8 зубчатого колеса в упор 9 корпуса 1 (фиг.6), обеспечивая поворот рукоятки 5 привода управления запуском ракеты приблизительно на 180°.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРЕЛКОВОЕ ОРУЖИЕ С НЕПРЕРЫВНЫМ РЕЖИМОМ СТРЕЛЬБЫ (ВАРИАНТЫ), ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ ОДНОВРЕМЕННОГО СНИЖЕНИЯ ОТДАЧИ И УРОВНЯ ЗВУКА СТРЕЛКОВОГО ОРУЖИЯ | 2003 |
|
RU2254539C1 |
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ (ВАРИАНТЫ), ПРОДОЛЬНО-МНОГОРЯДНЫЙ МАГАЗИН, КОМПЕНСАЦИОННОЕ УСТРОЙСТВО ОТПИРАНИЯ КАНАЛА СТВОЛА, КРИВОШИПНО-ПОЛЗУННОЕ ЗАПИРАЮЩЕЕ УСТРОЙСТВО, УСТРОЙСТВО БАЛАНСИРОВКИ МАСС ПОДВИЖНЫХ ЧАСТЕЙ И КОМПЕНСАЦИОННЫЙ СПОСОБ ОТПИРАНИЯ КАНАЛА СТВОЛА | 1998 |
|
RU2144171C1 |
| БОЕВАЯ МАШИНА РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ НА БАЗОВОМ ШАССИ ТАНКА | 2000 |
|
RU2170906C1 |
| Устройство для разметки шпуров оптическим методом | 1980 |
|
SU933994A1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| Устройство станционной централизации и блокировочной сигнализации | 1914 |
|
SU1422A1 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| ПУЛЕМЕТ С БАЛАНСИРОМ, СПОСОБ И УСТРОЙСТВО ЗАПИРАНИЯ ЗАТВОРА (ВАРИАНТЫ) | 2000 |
|
RU2181472C2 |
| АВТОМАТ, КОСОПАЗОВОЕ ЗАПИРАЮЩЕЕ УСТРОЙСТВО, ПРИЦЕЛ С БОКОВЫМ ВИЗИРОМ (ВАРИАНТЫ) | 2000 |
|
RU2191338C2 |


Изобретение относится к зенитному ракетному оружию, в частности, индивидуального пользования. Сущность изобретения заключается в том, что поворотная часть механизма перевода рукоятки выполнена в виде зубчатого кольца, соединенного с рукояткой взвода и установленного с возможностью поворота относительно корпуса. Зубчатое кольцо имеет выступ для зацепления с рукояткой привода управления запуском ракеты, а корпус имеет упор, ограничивающий поворот зубчатого кольца при возврате в исходное положение. Пружинный двигатель выполнен в виде закрепленного на корпусе основания с крышкой, внутри которого установлен вал с шестерней на конце, размещенной в корпусе для взаимодействия с зубчатым кольцом. На валу установлено храповое колесо, взаимодействующее с храповиком, и закреплен конец ленточной пружины, второй конец которой закреплен на внутренней поверхности основания. Механизм снабжен блокировочным устройством, установленным на наружной поверхности крышки пружинного двигателя, и состоит из электромагнита с толкателем и подпружиненного блокирующего рычага, размещенного на крышке, взаимодействующего с толкателем и выступающим опорным плечом храповика. Изобретение позволяет упростить подготовку механизма к работе, повысить надежность работы механизма, снизить его массу и обеспечить возможность использования механизма для дистанционного запуска зенитных ракет. 6 ил.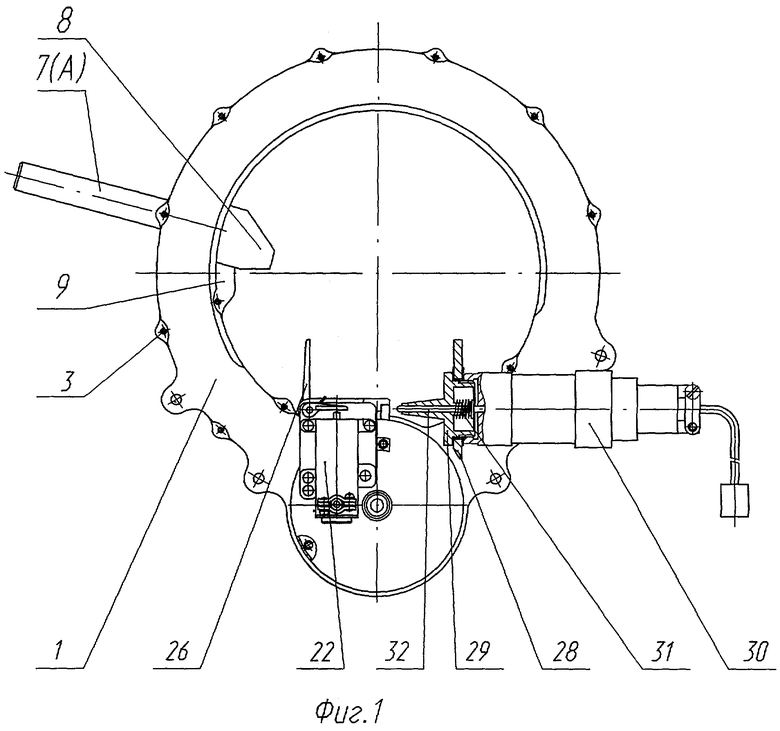
Механизм перевода рукоятки привода управления запуском ракеты индивидуального использования, содержащий корпус с установленными на нем пружинным двигателем и поворотной частью, соединенной с рукояткой взвода и расположенной соосно оси поворота рукоятки привода управления запуском ракеты, отличающийся тем, что поворотная часть выполнена в виде зубчатого кольца, соединенного с рукояткой взвода и установленного с возможностью поворота относительно корпуса с помощью тел качения, размещенных в желобах, выполненных на противолежащих цилиндрических поверхностях корпуса и зубчатого кольца, при этом зубчатое кольцо имеет выступ для зацепления с рукояткой привода управления запуском ракеты, а корпус имеет упор, ограничивающий поворот зубчатого кольца при возврате в исходное положение, пружинный двигатель выполнен в виде закрепленного на корпусе основания с крышкой, внутри которого установлен вал с шестерней на конце, размещенной в корпусе с возможностью взаимодействия с зубчатым кольцом, на валу установлено храповое колесо и закреплен конец ленточной пружины, второй конец которой закреплен на внутренней поверхности основания, в крышке установлен подпружиненный храповик в виде двуплечего рычага, одно плечо которого взаимодействует с храповым колесом, а другое плечо является опорным и выступает за пределы крышки, механизм дополнительно снабжен блокировочным устройством, установленным на наружной поверхности крышки пружинного двигателя и состоит из электромагнита с толкателем и подпружиненного блокирующего рычага, размещенного на крышке и взаимодействующего с толкателем электромагнита и выступающим опорным плечом храповика.
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ ЗЕНИТНЫХ РАКЕТ | 1994 |
|
RU2084804C1 |
| US 5661254 A, 26.08.1997 | |||
| ЛЕГКООБРАБАТЫВАЕМЫЕ, ВЫСОКОПРОЧНЫЕ, СТОЙКИЕ К ОКИСЛЕНИЮ Ni-Cr-Co-Mo-Al-СПЛАВЫ | 2014 |
|
RU2650659C2 |

