Изобретение относится машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности, и может быть использовано в резонансных приводах перемещения подвижных звеньев оборудования.
Известен резонансный привод, содержащий кинематически связанное с двигателем подвижное звено, фиксаторы положения одного из звеньев привода и упругий элемент, один из концов которого связан с основанием, и кинематически связанный с подвижным звеном кривошип, а второй конец упругого элемента шарнирно закреплен на шипе кривошипа, а фиксаторы положения расположены таким образом, что в положении фиксации точки закрепления упругого элемента лежат на прямой, проходящей через ось кривошипа.
Признаки совпадающие: кинематически связанное с двигателем подвижное звено, фиксаторы положений. (См. авторское свидетельство N 1357219, В 25 J 9/00, бюл. N 45, 1987 г.).
Причины, препятствующие поставленной задаче - недостаточная надежность упругого элемента, нет возможности быстрой и точной переналадки при изменении хода подвижного звена и при изменении усилия воздействия на него.
Известен резонансный привод, содержащий подвижное звено, связанное через промежуточное звено с установленным на основании двигателем, и закрепленный на подвижном звене кривошип, связанный через упругий элемент с основанием, и снабженный дополнительным звеном, жестко связанным с основанием и расположенным соосно с промежуточным звеном, и водилом, на одном конце которого с возможностью поворота установлено подвижное, а другой конец водила жестко связан с промежуточным звеном, при этом подвижное звено образует с дополнительным звеном зацепление, а плечи кривошипа и водила направлены в противоположные стороны вдоль оси упругого элемента в исходном состоянии привода.
Признаки совпадающие: наличие подвижного звена, двигателя, упругого элемента, основания. (См. авторское свидетельство N 1576306, В 25 J 9/00, бюл. N 25, 1990 г.).
Причины, препятствующие поставленной задаче - сложность конструкции из-за большого количества кинематических звеньев, что влечет неудобство переналадки.
Наиболее близкий по технической сущности и принятый за прототип резонансный привод, содержащий кинематически связанные с двигателем подвижное звено и кривошип, а также фиксатор положения звеньев привода и упругий элемент, один конец которого шарнирно закреплен на шипе кривошипа, и снабженного дополнительным кривошипом, который кинематически связан с поворотным звеном, при этом на шипе дополнительного кривошипа шарнирно закреплен второй конец упругого элемента, а поворотное звено и кривошипы снабжены зубчатыми венцами, при этом венцы обоих кривошипов находятся в зацеплении с венцом поворотного звена, а фиксатор выполнен в виде двуплечего рычага, на одном плече которого расположен зуб, имеющий возможность зацепления с одним из зубчатых венцов, зубья венца поворотного звена выполнены на его внутренней стороне.
Признаки совпадающие: кинематически связанное с двигателем поворотное звено, фиксатор положения, упругий элемент, наличие зубчатой передачи, внутреннее зубчатое зацепление. (См. авторское свидетельство N 1544550, В 25 J 19/00, бюл.N 7, 1990 г.).
Причины, препятствующие поставленной задаче - недостаточная надежность упругого элемента, нет возможности быстро и точно произвести переналадку по параметрам хода и накопления энергии, при изменении хода подвижного звена и при изменении усилия воздействия на него.
Задачей предложенного изобретения является повышение надежности, технологических возможностей при упрощении настройки резонансного привода, позволяющего устранить выше изложенные причины.
Технический результат заключается в том, что в резонансном приводе, содержащем основание, на котором установлены подвижное звено, кинематически связанное с двигателем, фиксаторы крайних положений подвижного звена, дополнительные упоры, а упругие элементы выполнены в виде торсионов с возможностью регулировки угла закрутки, и одни концы их закреплены в колесах самотормозящихся червячных передач, жестко установленных на основании, другие - в смонтированных в основании зубчатых колесах, сопряженных с подвижными секторами, с установленными на них регулируемыми упорами, посредством которых осуществляют поочередное взаимодействие с подвижным звеном, что исключает знакопеременную нагрузку торсионов и способствуют удобству их регулировки.
А исполнение всех фиксаторов, упоров и устройств расфиксации с возможностью регулировочных радиальных перемещений друг относительно друга позволяет быстро и точно произвести переналадку как по параметрам хода, так и по накоплению энергии, при изменении хода подвижного звена и при изменении усилия воздействия на него.
Предлагаемый резонансный привод поясняется чертежами, где на фиг.1 изображен общий вид привода, на фиг.2 - вид сверху фиг. 1.
Резонансный привод содержит основание (1), на котором установлены подвижное звено (2), кинематически связанное с двигателем (3), фиксаторы крайних положений (4) подвижного звена, дополнительные упоры (5), а упругие элементы выполнены в виде торсионов (6), с возможностью регулировки угла закрутки, одни концы их закреплены в колесах, самотормозящихся червячных передач (7), жестко установленных на основании, другие - в смонтированных в основании зубчатых колесах (8), сопряженных с подвижными секторами (9), с установленными на них регулируемыми упорами (10), посредством которых осуществляют поочередное взаимодействие с подвижным звеном, а устройство расфиксации выполнены в виде электромагнитных защелок (11).
Работает резонансный привод следующим образом: в нейтральном положении (подвижное звено (2) не находится ни в одном из крайних положений), посредством перемещения фиксаторов крайних положений (4) и устройств расфиксации (11) на основании (1) задают крайние положения хода подвижного звена (2), далее вращением соответствующего червяка, самотормозящихся червячных передач (7), связанных посредством торсионов (6) с зубчатыми колесами (8) и взаимодействующих с подвижными секторами (9), выставляют их, обеспечивая при этом ход на нужный угол, и дополнительными упорами (5) фиксируют их крайние (ненагруженные) положения. Затем устанавливают регулируемые упоры (10) на подвижных секторах (9), обеспечивая требуемый угол закрутки торсионов (6), и заводят подвижное звено (2) в одно из крайних положений (например правое), до фиксатора крайнего положения (4), где его удерживает электромагнитная защелка (11), при этом правый торсион закручивается и находится в нагруженном состоянии. По команде от управляющего устройства (не показано) срабатывает электромагнит защелки (11) и она выходит из гнезда подвижного звена (2), которое за счет взаимодействия с подвижным сектором (10), сопряженного с зубчатым колесом (8), под действием торсиона (6) начинает движение в сторону другого крайнего положения, в это время включается реверсивный электродвигатель (3), воздействуя на подвижное звено (2), сообщает ему дополнительную энергию, компенсирующую потери, что позволяет звену, взаимодействуя с другим подвижным сектором перейти в положение, при котором гнездо попадет в другую электромагнитную защелку, электродвигатель отключается, и теперь левый торсион оказывается в закрученном (нагруженном) состоянии, а правый - в ненагруженном.
Данный резонансный привод позволяет осуществлять перемещение подвижного звена, как симметрично, так и асимметрично относительно его оси в плане и с различным запасом потенциальной энергии. Например, больший запас потенциальной энергии у торсиона перед началом перемещения подвижного звена с грузом и меньший запас потенциальной энергии у торсиона, за счет которого происходит перемещение подвижного звена без груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
| ЭЛЕКТРОРЕЗОНАНСНЫЙ ПРИВОД | 2005 |
|
RU2310264C2 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ СООСНЫХ РЕДУКТОРОВ | 2003 |
|
RU2247960C1 |
| УСТРОЙСТВО ДЛЯ УПРОЧНЯЮЩЕ-ЧИСТОВОГО ОБКАТЫВАНИЯ ДЕТАЛЕЙ | 2001 |
|
RU2184024C1 |
| УСТРОЙСТВО ДЛЯ УПРОЧНЯЮЩЕ-ЧИСТОВОГО ОБКАТЫВАНИЯ ДЕТАЛЕЙ | 2001 |
|
RU2201323C2 |
| УСТРОЙСТВО ДЛЯ БЫСТРОГО ВЫВОДА РЕЗЦА ИЗ ЗОНЫ РЕЗАНИЯ | 1999 |
|
RU2162392C1 |
| УСТРОЙСТВО ДЛЯ БЫСТРОГО ВЫВОДА ФРЕЗЫ ИЗ ЗОНЫ РЕЗАНИЯ | 1999 |
|
RU2171734C2 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА РАСТЯЖЕНИЕ | 1998 |
|
RU2160439C2 |
| РЕГУЛИРУЕМЫЙ ЗУБЧАТО-РЫЧАЖНЫЙ ПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 2010 |
|
RU2440526C1 |
| УСТАНОВКА ДЛЯ ИСПЫТАНИЯ МАТЕРИАЛОВ НА ПРОЧНОСТЬ | 2000 |
|
RU2178161C2 |
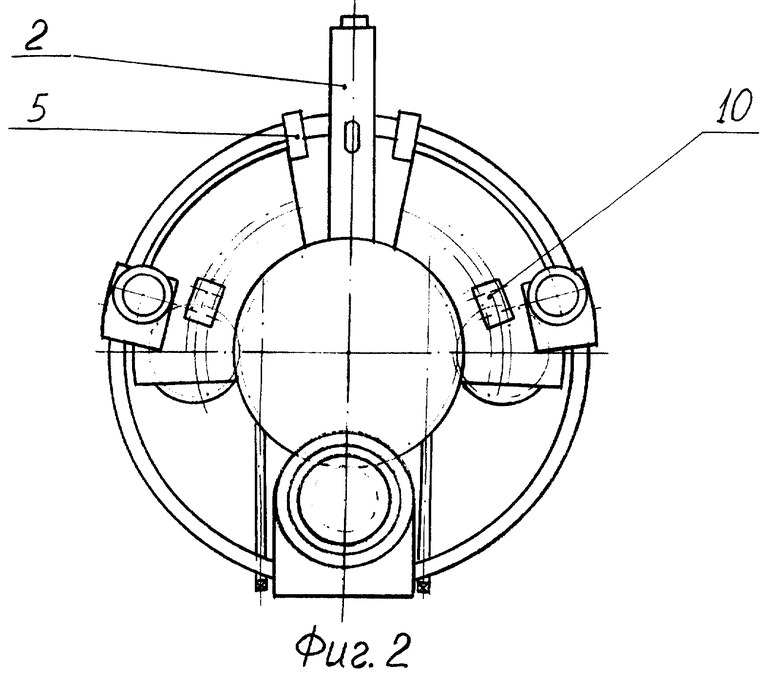
Изобретение относится к машиностроению и может быть использовано в резонансных приводах перемещения подвижных звеньев оборудования. Технический результат - создание резонансного привода, позволяющего надежно, быстро и точно произвести переналадку по параметрам хода и накопления энергии при изменении хода подвижного звена и при изменении усилия воздействия на него. Подвижное звено привода кинематически связано с двигателем (3) и имеет фиксаторы крайних положений (4). Упругие элементы выполнены в виде торсионов (6) с возможностью регулировки угла закрутки. Одни концы их закреплены в колесах самотормозящихся червячных передач (7), жестко установленных на основании (1). Другие концы закреплены в смонтированных в основании (1) зубчатых колесах (8), сопряженных с подвижными секторами (9) и с установленными на них регулируемыми упорами. Посредством упоров осуществляют поочередное взаимодействие с подвижным звеном (2). Устройства расфиксации выполнены в виде электромагнитных защелок (11). Привод позволяет надежно, быстро и точно произвести переналадку по параметрам хода и накопления энергии при изменении хода подвижного звена и при изменении усилия воздействия на него. 1 з.п.ф-лы, 2 ил.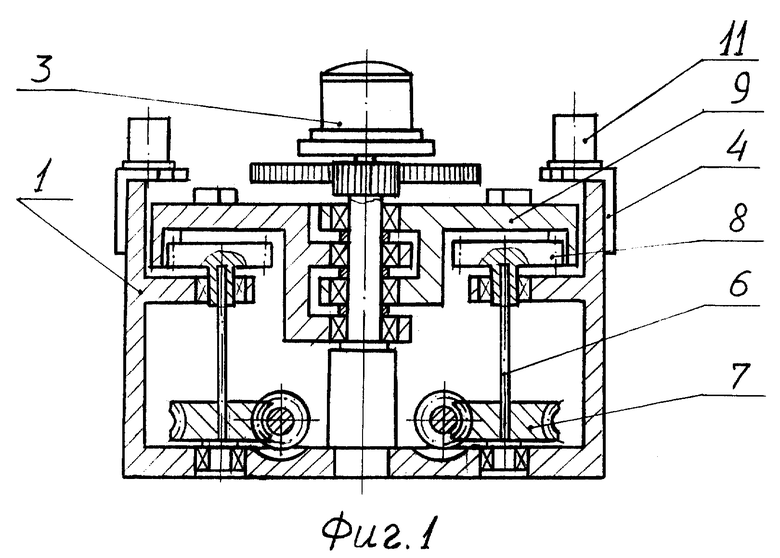
| Резонансный привод | 1988 |
|
SU1544550A1 |
| Резонансная механическая рука | 1982 |
|
SU1171306A1 |
| Способ управления резонансной механической рукой | 1985 |
|
SU1346419A1 |
| Резонансный привод | 1986 |
|
SU1357219A1 |
| Резонансный привод | 1988 |
|
SU1563963A1 |
| Резонансный манипулятор | 1989 |
|
SU1660950A1 |
