Изобретение относится к робототехнике, и может быть использовано для автоматизации основных и вспомогательных операций в различных производственных процессах.
Целью изобретения является снижение энергозатрат за счет уменьшения тепловых потерь в приводе.
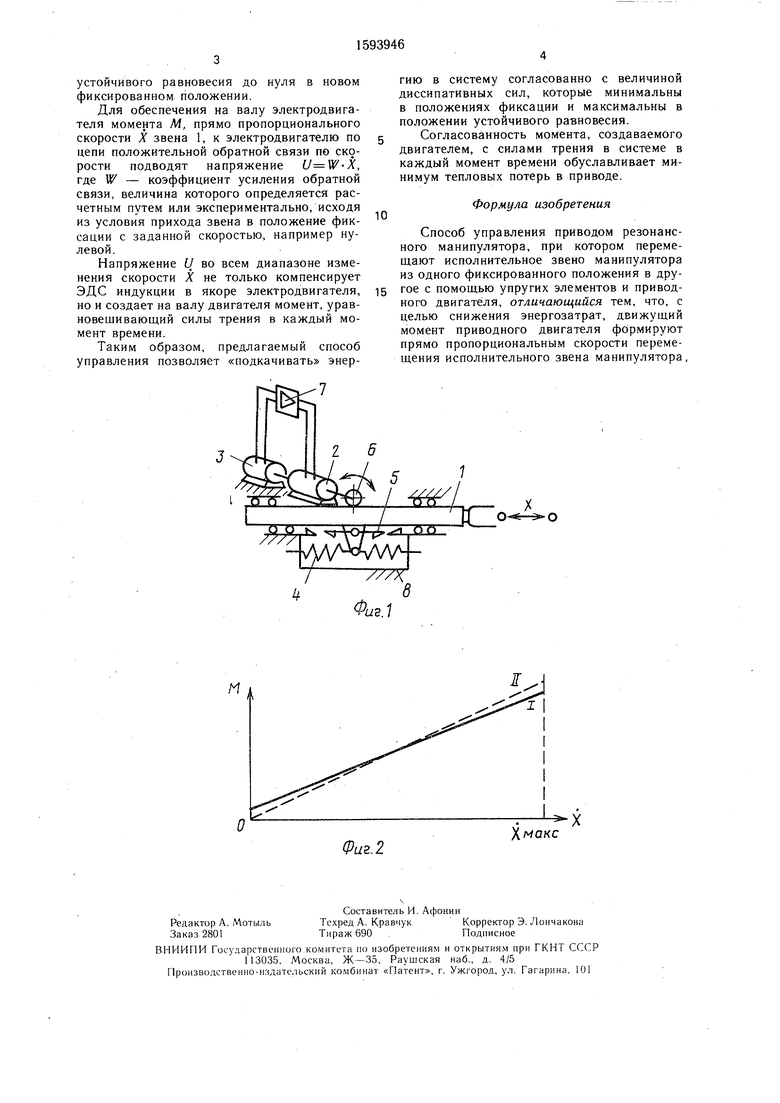
На фиг. 1 представлена схема устройства, реализующего предлагаемый способ; на фиг. 2 - графики изменения диссипативных сил () и движущего момента приводного двигателя (II) в зависимости от скорости перемещения () исполнительного звена манипулятора.
Устройство, реализующее способ, состоит из исполнительного звена 1 манипулятора, приводного двигателя 2 (например, электродвигателя постоянного тока), датчика 3 скорости (например, тахогенератора), упругого элемента 4, управляемого фиксатора 5. Выходной вал электродвигателя 2 через щес- терню 6 связан со звеном 1. Датчик 3 скорости электрически связан через усилитель 7 .с электродвигателем 2. Упругий элемент 4, взаимодействующий с основанием 8, связан со звеном 1.
Способ осуществляется следующим образом.
В начальный момент времени звено 1 удерживается фиксатором 5 в одном из крайних положений. Максимально деформированный упругий элемент 4 обладает запасом потенциальной энергии. Электродвигатель 2 обесточен. Для перевода звена в другое крайнее положение выводят из зацепления фиксатор 5. Под действием упругого элемента 4 начинается интенсивный разгон. На выходе датчика 3 скорости появляется напряжение U, пропорциональное величине скорости звена 1, которое через усилитель 7 подается на якорную обмотку электродвигателя 2. На выходном валу электродвигателя 2 создается момент, пропорциональный скорости движения звена 1, который способствует движению звена. После прохода положения устойчивого равнок .сия движение ведомого звена 1 начинает замедляться упругим элементом 4. Происходит плавный останов в новом крайнем положении. Фиксатор 5 входит в зацепление. .Момент, создаваемый электродвигателем 2, также плавно уменьшается от максимума в юложении
сл со
О5
СО
С5
устойчивого равновесия до нуля в новом фиксированном положении.
Для обеспечения на валу электродвигателя момента М, прямо пропорционального скорости X звена 1, к электродвигателю по цепи положительной обратной связи по скорости подводят напряжение , где W - коэффициент усиления обратной связи, величина которого определяется расчетным путем или экспериментально, исходя из условия прихода звена в положение фиксации с заданной скоростью, например нулевой.
Напряжение U во всем диапазоне изменения скорости X не только компенсирует ЭДС индукции в якоре электродвигателя, но и создает на валу двигателя момент, уравновешивающий силы трения в каждый момент времени.
Таким образом, предлагаемый способ управления позволяет «подкачивать энер
гию в систему согласованно с величиной диссипативных сил, которые минимальны в положениях фиксации и максимальны в положении устойчивого равновесия.
Согласованность момента, создаваемого двигателем, с силами трения в системе в каждый момент времени обуславливает минимум тепловых потерь в приводе.
Формула изобретения
Способ управления приводом резонансного манипулятора, при котором перемещают исполнительное звено манипулятора из одного фиксированного положения в другое с помощью упругих элементов и приводного двигателя, отличающийся тем, что, с целью снижения энергозатрат, движущий момент приводного двигателя формируют прямо пропорциональным скорости перемещения исполнительного звена манипулятора,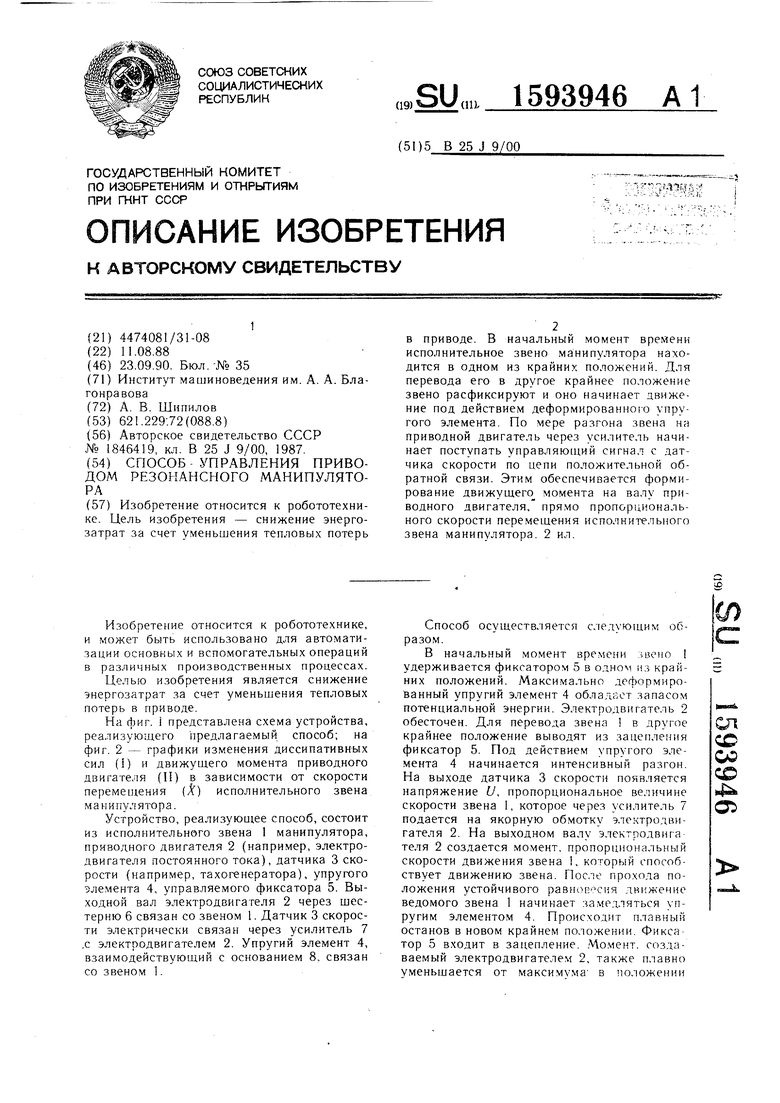
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления резонансной механической рукой | 1985 |
|
SU1346419A1 |
| Способ управления резонансной механической рукой | 1986 |
|
SU1682160A1 |
| Резонансный манипулятор | 2024 |
|
RU2840440C1 |
| Устройство для определения ускорения электрода регулятора дуговой печи | 1981 |
|
SU1086558A1 |
| Сустав задающего органа дистанционного копирующего манипулятора | 1972 |
|
SU444634A1 |
| Устройство управления звеном манипулятора с рекуперацией энергии | 1989 |
|
SU1710334A1 |
| ГИДРАВЛИЧЕСКИЙ ВИБРОВОЗБУДИТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ СЕЙСМИЧЕСКОГО СВИП-СИГНАЛА | 1991 |
|
RU2006882C1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Способ идентификации гидродинамических параметров тела | 2018 |
|
RU2706909C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2020 |
|
RU2741187C1 |
Изобретение относится к робототехнике. Цель изобретения - снижение энергозатрат за счет уменьшения тепловых потерь в приводе. В начальный момент времени исполнительное звено манипулятора находится в одном из крайних положений. Для перевода его в другое крайнее положение звено расфиксируют и оно начинает движение под действием деформированного упругого элемента. По мере разгона звена на приводной двигатель через усилитель начинает поступать управляющий сигнал с датчика скорости по цепи положительной обратной связи. Этим обеспечивается формирование движущего момента на валу приводного двигателя, прямо пропорционального скорости перемещения исполнительного звена манипулятора. 2 ил.
;..аусш:
Фиг. 2
г.аусш:
5/
Т ЗСо-о
/7/Х
Физ.1
XMOKC
| Авторское свидетельство СССР № 1846419, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
