Изобретение относится к сельскохозяйственному машиностроению, в частности к грузоподъемной технике.
Известно устройство для поворота и изменения вылета стрелы крана, содержащее основание, раму, шарнирно установленные на ней под углом друг к другу гидроцилиндры, штоки которых шарнирно соединены между собой и со стрелой, установленной на раме поворотной в горизонтальной плоскости оси с возможностью поворота в вертикальной плоскости, в котором с целью расширения зоны действия и снижения динамических нагрузок рама выполнена в виде Т-образной фермы, на концах горизонтальной перекладины которой закреплены корпуса гидроцилиндров, а вертикальная стойка фермы выполнена пустотелой для закрепления внутри нее поворотной оси, при этом ферма установлена на основании с возможностью поворота в горизонтальной плоскости посредством дополнительного привода, взаимодействующего с наружной поверхностью вертикальной стойки; дополнительный привод выполнен в виде гидровинтового механизма, включающего закрепленную на наружной поверхности вертикальной стойки Т-образной фермы обойму и размещенный внутри нее поршень с центральным отверстием, охватывающим вертикальную стойку, установленный с возможностью перемещения вдоль оси последней, зафиксированный от поворота вокруг нее и взаимодействующий с ней посредством винтовой нарезки, выполненной на сопрягаемых поверхностях поршня и стойки (SU, авт. св. N 1813697, МПК5 B 66 C 23/82. Устройство для поворота и изменения вылета стрелы крана // Герасун В.М. Карсаков А.А., Пындак В.И., Рогачев А.Ф., Строков В.Л. Заявление 11.03.1991, опубликовано 07.05.1993).
К причинам, препятствующим достижение требуемого технического результата при использовании известного устройства, относятся ограниченная зона обслуживания в горизонтальной плоскости и сложность конструкции дополнительного привода.
Наиболее близким устройством того же назначения к заявленному объекту по совокупности признаков является манипулятор, содержащий плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основании опорно-поворотную колонку со смонтированным шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью и дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки (см. Навесной манипулятор "Волгоградский" // Инф. листок Волгоградского ЦНТИ N 230-97. Составители: В.М. Герасун, В.И. Пындак, А.Ф. Рогачев. - Волгоград, 1997. - 4 с.).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, принятого за ближайший аналог, относятся ограниченная зона обслуживания в горизонтальной плоскости шарнирно-сочлененной стрелы и рукояти и неудовлетворительные динамические и кинематические характеристики механизма поворота.
Задача, на решение которой направлено заявляемое изобретение, - расширение зоны обслуживания.
Технический результат - повышение диапазона углов поворота стрелы и вылета рукояти, упрощение конструкции и снижение динамических нагрузок на крайних участках поворота колонки.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном манипуляторе, содержащем основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированной на ней шарнирно стрелой, рукоять, имеющую грузозахватный крюк, гидроприводы управления стрелой и рукоятью и механизмом поворота опорно-поворотной колонки, включающей в себя гидроприводы, согласно изобретению, основание выполнено в виде полого цилиндра с радиально ориентированными верхней и нижними балками, последние из которых снабжены выдвижными опорами, ось верхней балки расположена под углом к оси основания, причем удаленный конец этой балки направлен вверх, а проекция этой балки расположена посередине между соответствующими нижними балками, опорно-поворотная колонка выполнена в виде полой штанги, размещенной в полости цилиндра основания, механизм поворота снабжен ярусно установленными одноплечим и двуплечим рычагами, смонтированными с возможностью свободного вращения на опорно-поворотной колонке, и одноплечим рычагом, жестко связанным с поворотной колонкой, при этом основание одного из гидроприводов шарнирно соединено с удаленным концом верхней наклонной балки основания и его шток связан со свободным концом вращающегося одноплечего рычага, концы двуплечего рычага шарнирно соединены с основаниями пары других гидроприводов, шток одного из них смонтирован на свободном конце рычага опорно-поворотной колонки, а шток другого - на свободном конце вращающегося одноплечего рычага; кронштейны навески основания смонтированы на верхней наклонной и нижней паре балок основания; рукоять выполнена телескопической.
За счет того что вертикальная ось симметрии основания совмещена с осью вращения опорно-поворотной колонки, опоры размещены равноудаленно от оси симметрии основания и по отношению друг к другу, количество опор больше двух, а механизм поворота обеспечивает угловое смещение грузозахватного крюка относительно вертикальной оси от исходного положения на угол ±180o, достигается указанный выше технический результат.
Изобретение поясняется чертежом, где схематично в аксонометрическом изображении представлен заявленный манипулятор.
Манипулятор содержит основание 1 с кронштейнами навески 2, 3 и 4 и выдвинутыми опорами 5, 6 и 7, закрепленную с возможностью поворота вокруг вертикальной оси основания 1 опорно-поворотную колонку 8 со смонтированной на ней шарнирно стрелой 9, рукоять 10, имеющую грузозахватный крюк 11. Управление стрелок 9 производится гидроприводом 12, а рукояти 10 - гидроприводом 13. Манипулятор включает механизм поворота опорно-поворотной колонки 8, включающей в себя гидроприводы.
Основание 1 выполнено в виде полого цилиндра с радиально ориентированными верхней балкой 14 и нижними балками 15, 16 и 17. Нижние балки 17 - 17 снабжены выдвижными опорами 5-7. Геометрические оси нижних балок 15 - 17 ориентированы перпендикулярно к вертикальной оси симметрии полого цилиндра основания 1. В горизонтальной плоскости балки 15 - 17 взаимно смещены с угловым шагом 120 ± 0,5o. Геометрическая ось верхней балки 14 расположена под углом к вертикальной оси симметрии основания 1. Угол наклона оси верхней балки 14 к оси основания 1 выполнен по крайней мере равным или больше угла наклона штока 18 гидропривода 12 управления стрелой 9 при ее крайнем нижнем положении (шток 18 полностью утоплен в полости гильзы силового цилиндра гидропривода 12). Удаленный конец 19 верхней балки 14 направлен вверх. Проекция 1-1' верхней балки 14 расположена посередине между нижними соответствующими балками 15 и 16. Опорно-поворотная колонка 8 выполнена в виде полой штанги, размещенной в полости цилиндра основания 1. Опорно-поворотная колонка 8 дополнительно соединена с основанием 1 механизмом поворота. Механизм поворота колонки 8 снабжен в виде кинематически связанных гидроприводов 20, 21 и 22 управления и ярусно установленными одноплечим рычагом 23 и двуплечим рычагом 24. Рычаги 23 и 24 смонтированы с возможностью свободного вращения на опорно-поворотной колонке 8. Одноплечий рычаг 25 жестко связан с поворотной колонкой 8 прямобочными шлицами. Основание гидропривода 20 шарнирно соединено с верхним концом 19 наклонной балки 14 основания 1. Его шток 26 связан со свободным концом одноплечего рычага 23. Удаленные концы двуплечего рычага 24 шарнирно соединены с основаниями пары гидроприводов 21 и 22. Шток 27 гидропривода 22 смонтирован на свободном конце рычага 25 опорно-поворотной колонки 8. Шток 28 гидропривода 21 связан шарниром и осью со свободным концом одноплечего рычага 23. Полости гидроприводов 20 и 21 гидравлически параллельно соединены с гидравлической сетью трактора, а полости гидроприводов 21 и 22 - гидравлически перекрестно.
Кронштейны 3, 4, 2 навески основания 1 смонтированы соответственно на верхней наклонной балке 14 и нижней паре балок 16 и 15. В кронштейнах 2-4 с возможностью демонтажа установлены пальцы. Кронштейны 2-4 образуют присоединительный треугольник навески основания 1 на тяги навесной системы агрегатируемого трактора. Рукоять 10 выполнена телескопической. В полости рукояти 10 установлены внутренняя выдвижная часть 29 и средняя подвижная часть 30. Выдвигаемая часть 29 и средняя часть 30 в полости рукояти 10 зафиксированы пальцами. Грузозахватный крюк 11 смонтирован шарнирно на консольной части выдвижной части 29.
Манипулятор работает следующим образом.
Агрегатируемый трактор штатно готовят к работе. В гидравлическую сеть трактора дополнительно вводят перепускной кран. Нижние тяги навесной системы трактора соединяют с кронштейнами 2 и 3, а центральную верхнюю тягу навески - с кронштейном 4. Рукавами высокого давления гидравлически соединяют левый гидрозолотник с гидроприводом 12, а правый гидрозолотник - с гидроприводом 13. Средний гидрозолотник гидравлически через дополнительный кран соединяют с гидроприводами 20, 21 м 22 управления поворотом колонки 8. Части 29 и 30 максимально выдвинуты из полости рукояти 10. Выдвигаемые опоры 5-7 приводят в рабочее положение. Без нагрузки на грузозахватном крюке 11 проверяют работу гидроприводов 12, 13, 20, 21 и 22. Дли этого тракторист (механизатор) ручки левой, правой, средней секций гидрозолотников последовательно переводит в положение "Подъем", "Нейтральное", "Опускание" и обратно. Управление подъемом и перемещением груза относительно опоры 7 очевидно из представленной пространственной схемы манипулятора. Поворот опорно-поворотной колонки 8 со стрелой 9 и рукоятью 10 осуществляют следующим образом.
При подаче масла из гидросети трактора под рабочим давлением (20 МПа) в бесштоковую полость гидропривода 20 шток 26 последнего поворачивает одноплечий рычаг 23 на угол 120±1o. Вместе с этим перемещается шток 28 гидропривода 21 и двуплечий рычаг 24, на котором шарнирно установлено его основание. Так как бесштоковые полости гидроприводов 20 и 21 гидравлически соединены параллельно, шток 28 выдвигается из полости гильзы гидропривода 21. Двуплечий рычаг 24 относительно одноплечего рычага 23 поворачивается дополнительно на угол 120±1oC. Памятуя о том, что гидроприводы 21 и 22 взаимно соединены гидравлически перекрестно, шток 27 гидропривода 22 втягивается в полость гильзы гидропривода 22, а второе плечо рычага 24 приближается к одноплечему рычагу 25 опорно-поворотной колонки 8. Угол поворота стрелы 9 и рукоятки 10 в горизонтальной плоскости увеличивается еще на 120±1o. Таким образом механизм поворота обеспечивает поворот в горизонтальной плоскости стрелы 9 и рукояти 10 на угол 360±1o. Телескопическая рукоять 10 с подвижной частью 30 и выдвигаемой частью 29 существенно увеличивает зону обслуживания в радиальном направлении и по высоте погрузки.
Каждый из упомянутых гидроприводов 20, 21 и 22 без существенного снижения своих технико-эксплуатационных параметров обеспечивает надежный поворот с заданной скоростью и моментами сил на рычагах 23 - 25 на углы в пределах ±150o. Это в конечном итоге обеспечивает поворот опорно-поворотной колонки на угол 450o от исходного положения.
Описанная конструкция заявленного манипулятора проста в конструктивном отношении и предусматривает использование серийно выпускаемых стандартных гидроприводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2166473C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |
Изобретение относится к грузоподъемной технике, в частности к сельскохозяйственному машиностроению. Манипулятор содержит основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированной на ней шарнирно стрелой, рукоять, имеющую грузозахватный крюк, гидроприводы управления стрелой и рукоятью и механизм поворота опорно-поворотной колонки, включающий в себя гидроприводы. Основание выполнено в виде полого цилиндра с радиально ориентированными верхней и нижними балками, последние из которых снабжены выдвижными опорами, ось верхней балки расположена под углом к оси основания, причем удаленный конец этой балки направлен вверх, а проекция этой балки расположена посередине между соответствующими нижними балкам, опорно-поворотная колонка выполнена в виде полой штанги, размещенной в полости цилиндра основания, механизм поворота снабжен ярусно установленными одноплечим и двуплечим рычагами, смонтированными с возможностью свободного вращения на опорно-поворотной колонке, и одноплечим рычагом, жестко связанным с поворотной колонкой. Основание одного из гидроприводов шарнирно соединено с удаленным концом верхней наклонной балки основания, и его шток связан со свободным концом вращающегося одноплечего рычага, концы двуплечего рычага шарнирно соединены с основаниями пары других гидроприводов, шток одного из них смонтирован на свободном конце рычага опорно-поворотной колонки, а шток другого - на свободном конце вращающегося одноплечего рычага. Изобретение позволяет расширить диапазон углов поворота стрелы и вылета рукояти, упрощение конструкции и снижение динамических нагрузок на крайних участках поворота колонки. 2 з.п.ф-лы, 1 ил.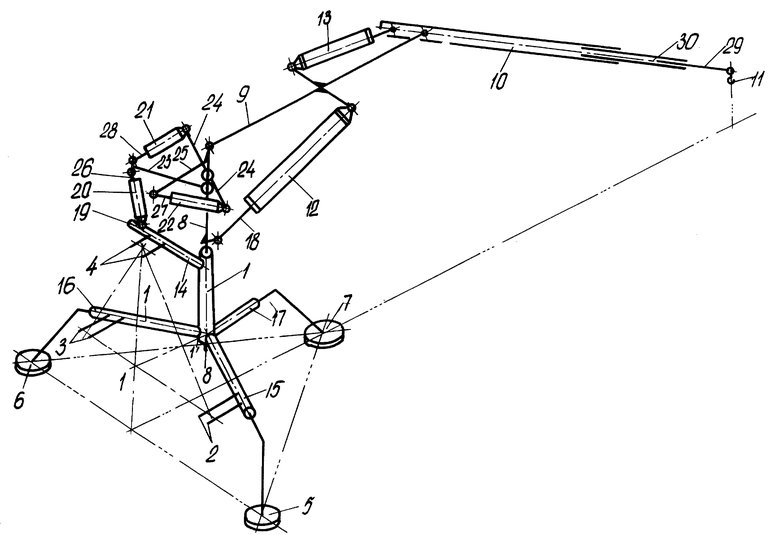
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
| - Волгоград, 1977 | |||
| Способ контроля геометрии многолезвийного режущего инструмента | 1984 |
|
SU1229557A1 |
| US 3533515 A, 13.10.1970 | |||
| Механизм поворота колонны стрелового крана | 1987 |
|
SU1463708A1 |
