Изобретение относится к относится к области маскировки наземных мобильных объектов от космических систем радиолокационного наблюдения (РЛН).
Известен способ защиты мобильных объектов от радиолокационных средств разведки и наведения оружия по патенту RUS №2577843 [1], согласно которому выполняют следующую последовательность действий:
предварительно устанавливают малогабаритные модули помех вдоль трассы движения мобильного объекта на расстоянии друг от друга, обеспечивающем непрерывное пребывание радиолокационного средства в зоне действия по меньшей мере одного малогабаритного модуля помех, и имеющие возможность управления с мобильного объекта,
мобильный объект оснащают пультом управления малогабаритными модулями помех,
формируют поля помех с помощью дистанционно управляемых малогабаритных модулей помех, за счет включения малогабаритного модуля помех при подходе мобильного объекта к нему на заданное расстояние, а выключают малогабаритный модуль помех при удалении от него мобильного объекта на заданное расстояние.
При таком способе обеспечивается защита мобильных объектов от средств разведки и наведения оружия за счет создания помех при движении мобильного объекта в районе его нахождения.
Недостатком аналога является относительно длительное время организации скрытия мобильного объекта, обусловленное необходимостью установки малогабаритных модулей помех вдоль трассы движения мобильного объекта.
Известен способ скрытия мобильного объекта от РЛН из космоса по патенту RUS №2312297 [2], согласно которому выполняют следующую последовательность действий:
рассчитывают моменты времени пролета радиолокатором точек минимальной дальности до него от объекта и соответствующие им углы места (УМ) и азимута;
определяют углы места и азимута направления РЛН из множества углов места и азимута направлений на точки минимальной дальности до радиолокатора;
рассчитывают ориентацию и размеры зон скрытия - зон радиолокационных наложений и радиолокационных теней искусственных и естественных объектов участков местности, расположенных по маршруту движения, пролета космического радиолокатора;
осуществляют выбор зон скрытия, обеспечивающих снижение уровня обнаружения и распознавания, с учетом габаритных размеров мобильного объекта;
осуществляют перемещение мобильного объекта по маршруту движения с учетом его скорости и расстояния между зонами скрытия в интервалах между моментами пролета космического радиолокатора, и остановку мобильного объекта в моменты его пролетов в зонах скрытия.
В указанном способе обеспечивается заданный уровень снижения вероятности обнаружения и распознавания - преимущественно в зонах радиолокационных теней.
Недостатками аналога являются относительно длительное время перемещения мобильного объекта, обусловленное необходимостью остановки в зонах радиолокационных теней и ограничением на перемещение в случаях, когда искусственных и естественных объектов участков местности, дающих радиолокационную тень недостаточно.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по своей технической сущности является способ скрытия наземного мобильного объекта от РЛН из космоса по патенту RUS №2730374 [3] заключающимся в том, что:
измерение периодов повторения импульсов и длительностей импульсов в течении непродолжительного времени, составляющего 2-5 секунд в несколько моментов времени;
построение ближней и дальней границы ЗРВ КРЛ;
построение семейства рабочих и нерабочих зон КРЛ;
выработка решения о принятии мер скрытия НМО от РЛН из космоса в случае если НМО;
принятие мер скрытия НМО от РЛН из космоса за счет создания облака аэрозоля путем разрыва пиротехнического снаряда.
В способе прототипе [3] показана возможность создания облака аэрозоля для маскировочной дымовой завесы, не позволяющей противнику вести РЛН. Основу указанного способа составляет выявление факта радиолокационного наблюдения из касмоса и создание облака аэрозоля на пути распространения зондирующего сигнала путем разрыва пиротехнического снаряда.
Облако аэрозоля содержит покрытые слоем металла толщиной не более 1 мкм полые алюмосиликатные микросферы с нанопорами в стенках, с плотностью 0,18-0,9 г/см3, с размером до 150 мкм и заполненные водородом в качестве горючего компонента, причем размер нанопор соответствует размеру молекул водорода.
На практике область применения способа прототипа для скрытия НМО, перемещающегося на большие расстояния, от РЛН из космоса ограничена, по причинам:
невозможности создание запаса пиропатронов, обеспечивающих создание облака аэрозоля на всем протяжении выбранного маршрута;
невозможность создания облака аэрозоля на пути распространения зондирующего сигнала путем разрыва пиротехнического снаряда на автомобильных дорогах общего пользования, в частности, из-за создания предпосылок к дорожно-транспортным происшествиям для участников дорожного движения.
Известно, что НМО может находиться в зоне радиовидимости КРЛ при одном пролете в течении определенного времени. Продолжительность этого времени зависит от ряда факторов (высоты КРЛ, взаимного расположения маршрута НМО и траектории КРЛ, предельных рабочих углах места КРЛ и др.) и может достигать 30 минут. За время перемещения НМО по длительному маршруту возможны десятки-сотни пролетов КРЛ, которые потенциально могут осуществлять радиолокационное наблюдение из космоса за НМО.
Указанные обстоятельства накладывают ограничения на пространственно-временное планирование маршрута и приводят к увеличению времени, затрачиваемого НМО на преодоление выбранного маршрута, обусловленное необходимостью переодического пополнения запаса пиротехнических снарядов, а также выбора маршрута с обязательным условием нахождения НМО в моменты нахождения в зонах радиовидимости каждого из пролетов КРЛ в районах, удаленных от автомобильных дорог общего пользования.
Таким образом, способ прототип обладает существенным недостатком: большое время преодоления НМО выбранного маршрута в условиях защиты от РЛН из космоса.
Техническим результатом при использовании заявленного способа является снижение времени преодоления НМО выбранного маршрута в условиях защиты от РЛН из космоса за счет своевременного выявления факта нахождения НМО в одной из рабочих зон КРЛ и принятия мер скрытия от РЛН наблюдения из космоса путем создания имитирующей радиопомехи с рассчитанными параметрами.
Указанный технический результат достигается тем, что в известном способе скрытия НМО от РЛН из космоса, заключающимся в том, что рассчитывают период времени нахождения НМО в зоне радиовидимости (ЗРВ) космического радиолокатора (КРЛ) на основе априорно известных географического расположения маршрута движения НМО и параметров орбиты КРЛ, в период времени нахождения НМО в ЗРВ КРЛ принимают радиосигналы от КРЛ в N≥2 моментов времени tn, где n=1…N, определяют координаты КРЛ  для каждого момента времени tn на основе априорно известных параметров его орбиты, измеряют длительность радиолокационного импульса (РЛИ) τи, измеряют периоды повторения последовательности радиолокационных импульсов (ПРЛИ) Тn для каждого момента времени tn, отображают на карте внутренние и внешние границы радиовидимости КРЛ для каждого момента времени tn, используя предварительно заданные минимальный и максимальный углы места КРЛ, отображают на карте семейство рабочих и нерабочих зон КРЛ для каждого момента времени tn, в случае, если НМО находится в одной из рабочих зон КРЛ во все моменты времени tn, применяют меры скрытия НМО от РЛН из космоса, дополнительно устанавливают станцию радиопомех (СРП) J на земной поверхности с известными координатами.
для каждого момента времени tn на основе априорно известных параметров его орбиты, измеряют длительность радиолокационного импульса (РЛИ) τи, измеряют периоды повторения последовательности радиолокационных импульсов (ПРЛИ) Тn для каждого момента времени tn, отображают на карте внутренние и внешние границы радиовидимости КРЛ для каждого момента времени tn, используя предварительно заданные минимальный и максимальный углы места КРЛ, отображают на карте семейство рабочих и нерабочих зон КРЛ для каждого момента времени tn, в случае, если НМО находится в одной из рабочих зон КРЛ во все моменты времени tn, применяют меры скрытия НМО от РЛН из космоса, дополнительно устанавливают станцию радиопомех (СРП) J на земной поверхности с известными координатами.
В ходе преодоления маршрута наземным мобильным объектом измеряют текущие координаты  и ортогональные составляющие вектора скорости НМО
и ортогональные составляющие вектора скорости НМО  для каждого момента времени tn.
для каждого момента времени tn.
Передают в СРП по средствам связи текущие координаты  и ортогональные составляющие вектора скорости НМО
и ортогональные составляющие вектора скорости НМО  для каждого момента времени tn.
для каждого момента времени tn.
Рассчитывают расстояния между КРЛ и НМО  а также между КРЛ и СРП
а также между КРЛ и СРП  для каждого момента времени tn.
для каждого момента времени tn.
Измеряют мощности ПРЛИ  и несущие частоты ПРЛИ
и несущие частоты ПРЛИ  для каждого момента времени tn.
для каждого момента времени tn.
Рассчитывают радиальные скорости КРЛ относительно НМО  и СРП
и СРП  а также НМО относительно КРЛ
а также НМО относительно КРЛ  для каждого момента времени tn.
для каждого момента времени tn.
Определяют ортогональные составляющие векторов скорости КРЛ  для каждого момента времени tn на основе априорно известных параметров его орбиты.
для каждого момента времени tn на основе априорно известных параметров его орбиты.
Если НМО находится в одной из рабочих зон КРЛ во все моменты времени tn, принимают меры скрытия НМО от РЛН из космоса с использованием СРП за счет излучения имитирующей радиопомехи с предварительно рассчитанными параметрами.
Периоды повторения ПРЛИ Тn для каждого момента времени tn измеряют используя усреднение по пачке ПРЛИ, содержащей не менее десяти одиночных РЛИ.
На карте внутренние и внешние границы радиовидимости КРЛ для каждого момента времени tn отображают, учитывая модель Земли в виде сферы эквивалентного радиуса, соответствующего широте подспутниковой точки (ПТ) КРЛ.
Границы рабочих и нерабочих зон КРЛ для каждого момента времени tn отображают, учитывая модель Земли в виде сферы эквивалентного радиуса, соответствующего широте ПТ КРЛ на основе предварительно рассчитанных наклонных дальностей, соответствующих внешним и внутренним границам этих зон.
Измерения длительности РЛИ τи, периодов повторения ПРЛИ Тn, несущих частот ПРЛИ  мощностей ПРЛИ
мощностей ПРЛИ  производят с помощью аппаратуры СРП J.
производят с помощью аппаратуры СРП J.
Расчеты расстояний между КРЛ и НМО  расстояний между КРЛ и СРП
расстояний между КРЛ и СРП  радиальных скоростей КРЛ относительно НМО
радиальных скоростей КРЛ относительно НМО  и СРП
и СРП  НМО относительно КРЛ
НМО относительно КРЛ  а также параметров имитирующей радиопомехи производят с помощью аппаратуры СРП J.
а также параметров имитирующей радиопомехи производят с помощью аппаратуры СРП J.
В качестве имитирующей радиопомехи используют М≥1 ПРЛИ, при этом:
длительности РЛИ каждой ПРЛИ выбирают равными измеренной длительности РЛИ τи;
периоды каждой ПРЛИ выбирают равными измеренным периодам повторения ПРИ Тn для каждого момента времени tn;
несущие частоты ПРЛИ  для каждого момента времени tn вычисляют на основе измеренных несущих частот ПРЛИ
для каждого момента времени tn вычисляют на основе измеренных несущих частот ПРЛИ  и рассчитанных радиальных скоростей КРЛ относительно НМО
и рассчитанных радиальных скоростей КРЛ относительно НМО  КРЛ относительно СРП
КРЛ относительно СРП  и НМО относительно КРЛ
и НМО относительно КРЛ 
моменты стартов излучений каждой m-й ПРЛИ  вычисляют на основе рассчитанных расстояний между КРЛ и НМО
вычисляют на основе рассчитанных расстояний между КРЛ и НМО  а также расстояний между КРЛ и СРП
а также расстояний между КРЛ и СРП  для каждого момента времени tn;
для каждого момента времени tn;
мощности каждой ПРЛИ  рассчитывают с учетом измеренных мощностей ПРЛИ
рассчитывают с учетом измеренных мощностей ПРЛИ  и рассчитанных расстояний между КРЛ и НМО
и рассчитанных расстояний между КРЛ и НМО  а также расстояний между КРЛ и СРП
а также расстояний между КРЛ и СРП  для каждого момента времени tn.
для каждого момента времени tn.
Благодаря указанной новой совокупности существенных признаков, в том числе за счет своевременного выявления факта нахождения НМО в одной из рабочих зон КРЛ и принятия мер скрытия от РЛН из космоса путем создания имитирующей радиопомехи с рассчитанными параметрами, достигается цель изобретения: снижении времени преодоления НМО выбранного маршрута в условиях защиты от РЛН из космоса.
Заявленное изобретение поясняется чертежами, на которых показаны:
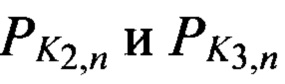
на фиг. 1 геометрическая основа взаимосвязи наклонной дальности D с расстоянием от ПТ до точки отражения (ТО);
на фиг. 2 геометрическая основа взаимосвязи максимальной Dmax и минимальной Dmin наклонных дальностей с углами места и βmax и βmin;
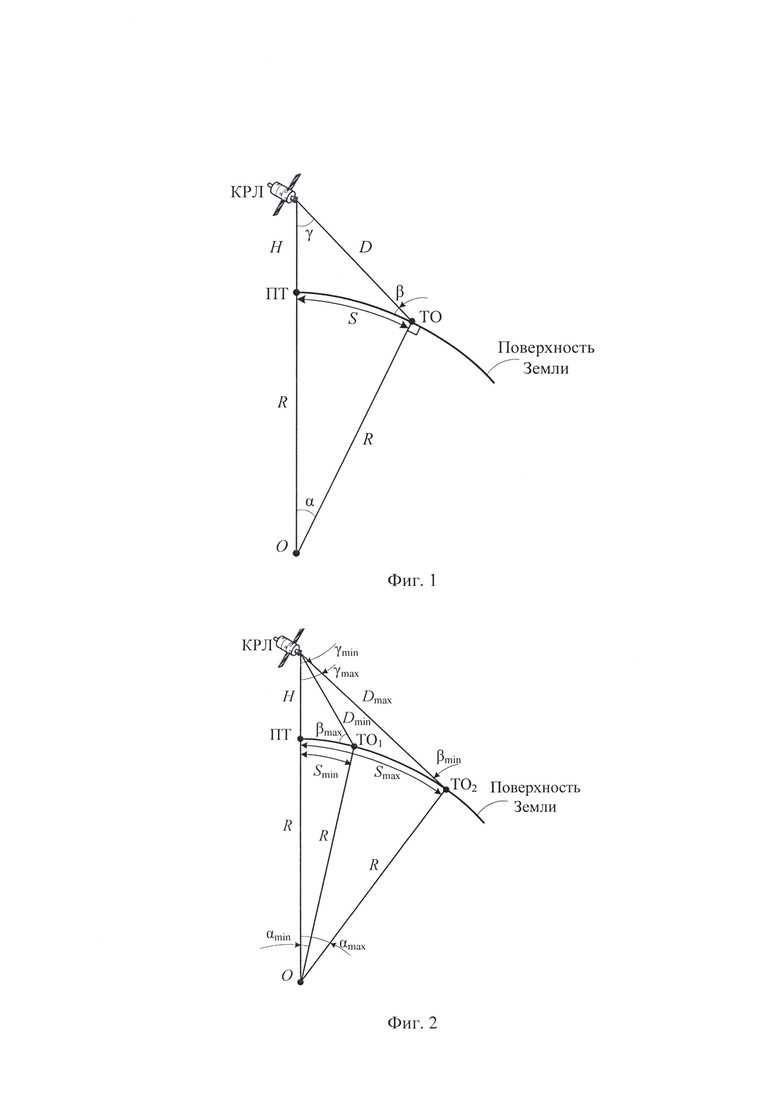
на фиг. 3 Внешняя и внутренняя границы зоны радиовидимости (ЗРВ) КРЛ в момент времени t1;
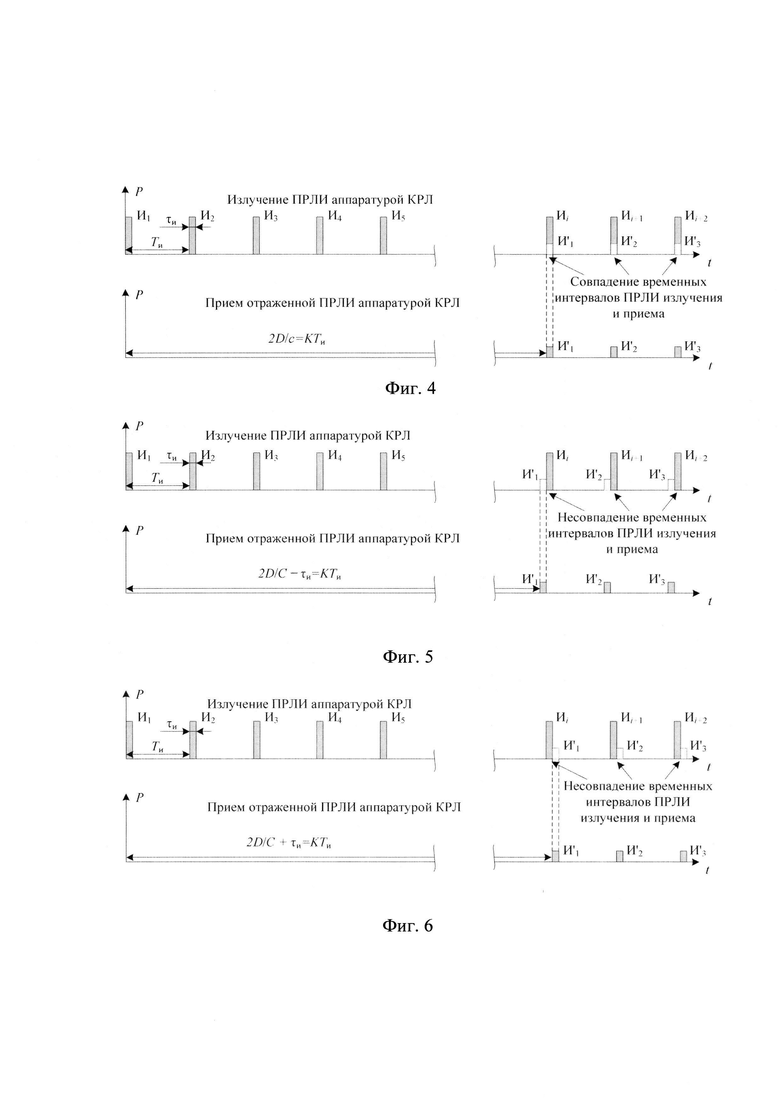
на фиг. 4 иллюстрация условия (2D/c=FT) невозможности приема отраженной ПРЛИ на борт КРЛ;
на фиг. 5 иллюстрация граничного условия (2D/c-τи=FT) возможности приема отраженной ПРЛИ на борт КРЛ;
на фиг. 6 иллюстрация граничного условия {2D/c+τи=FT) возможности приема отраженной ПРЛИ на борт КРЛ;
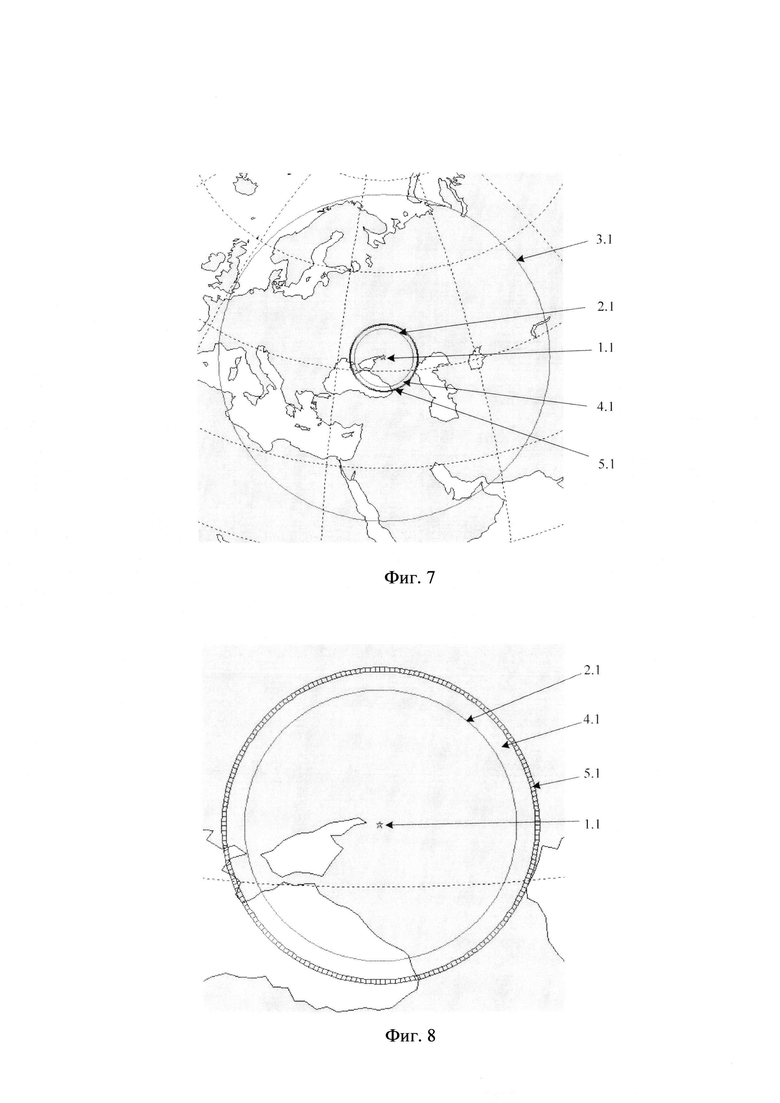
на фиг. 7 построение 1-й рабочей и 1-й нерабочей зон КРЛ в момент времени t1;
на фиг. 8 построение 1-й рабочей и 1-й нерабочей зон в момент времени t1 при увеличенном масштабе;
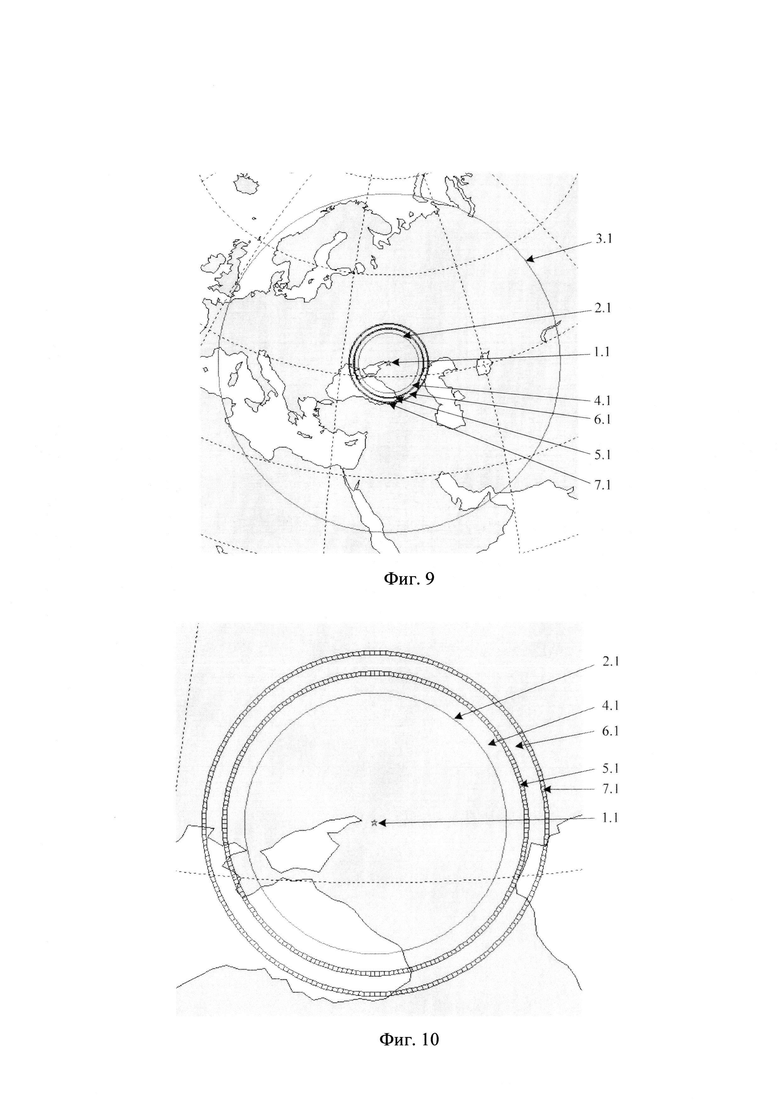
на фиг. 9 построение 1-й и 2-й рабочих, 1-й и 2-й нерабочих зон КРЛ в момент времени t1;
на фиг. 10 построение 1-й и 2-й рабочих, 1-й и 2-й нерабочих зон КРЛ в момент времени t1 при увеличенном масштабе;
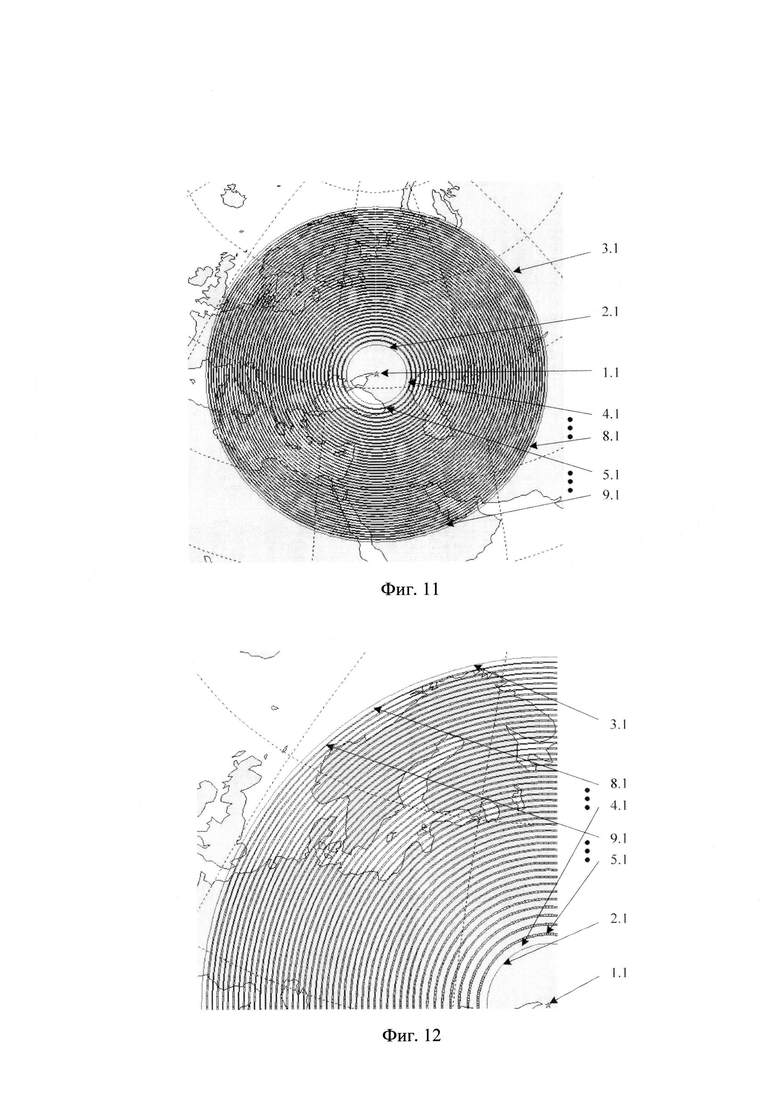
на фиг. 11 построение 1…46-й рабочих, 1…45-й нерабочих зон КРЛ в момент времени t1;
на фиг. 12 построение 1…46-й рабочих, 1…45-й нерабочих зон КРЛ в момент времени t1 при увеличенном масштабе;
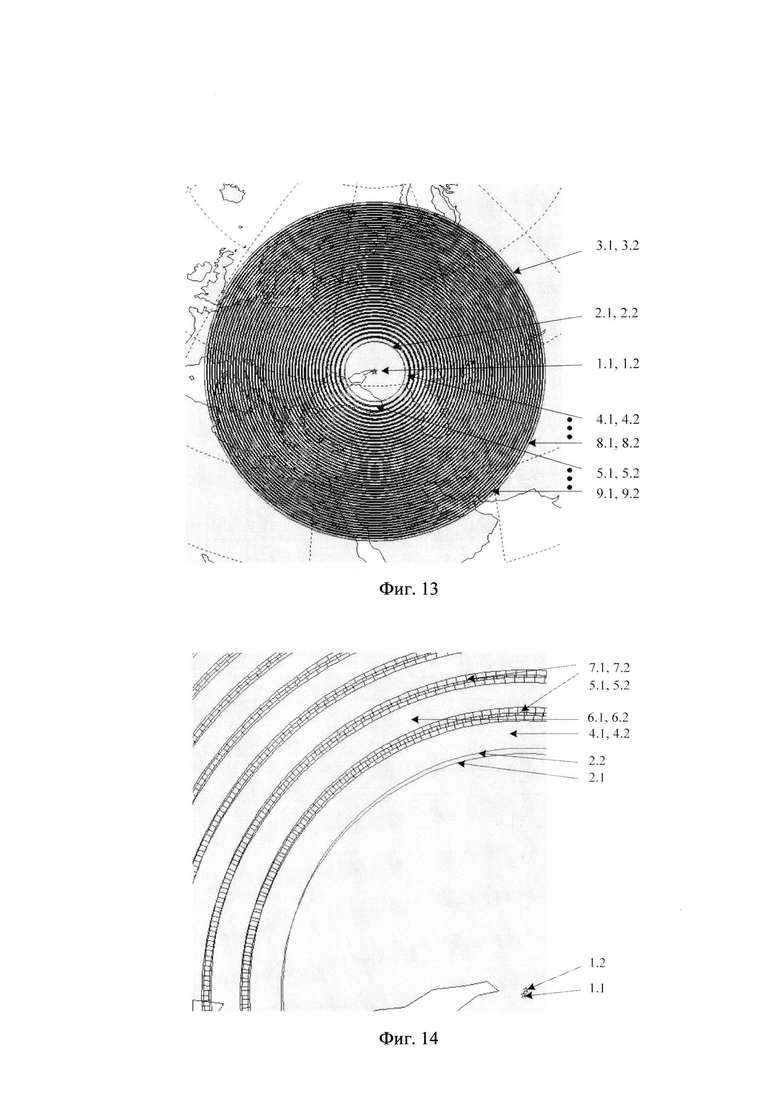
на фиг. 13 построение 1…46-й рабочих и 1…45-й нерабочих зон КРЛ в моменты времени t1 и t2;
на фиг. 14 построение рабочих и нерабочих зон КРЛ в моменты времени t1 и t2 при увеличенном масштабе;
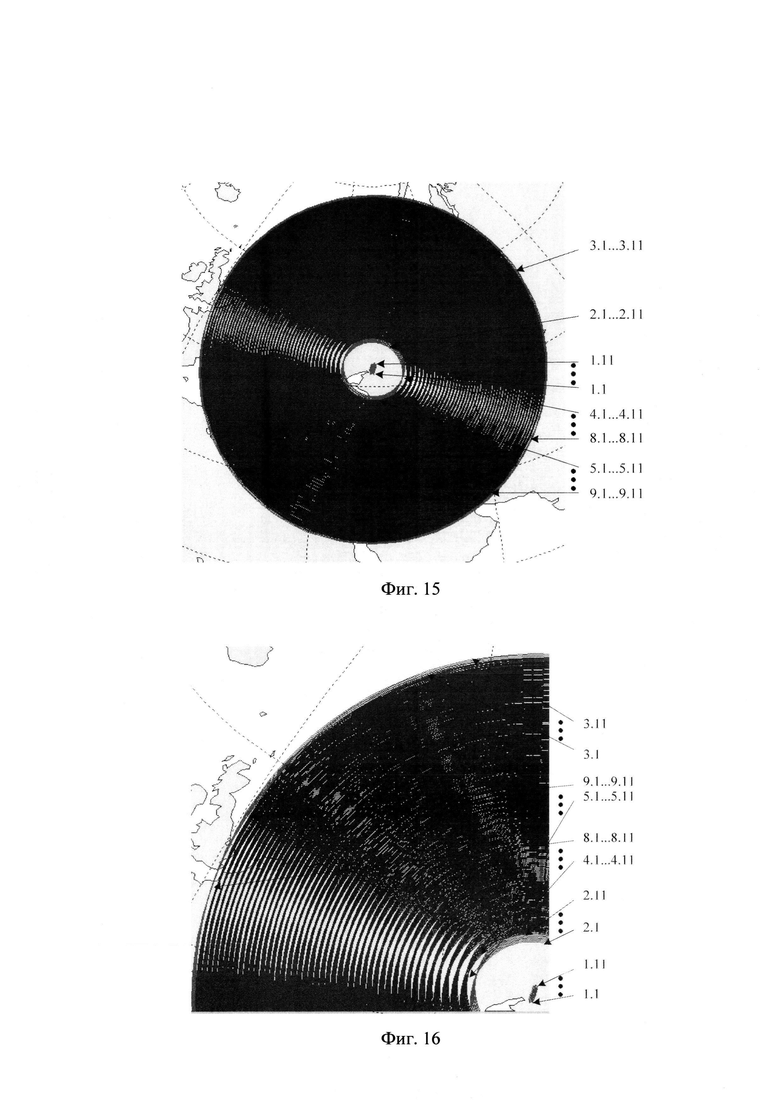
на фиг. 15 построение 1…46-х рабочих и 1…45-х нерабочих зон КРЛ в моменты времени t1…t11;
на фиг. 16 построение 1…46-х рабочих и 1…45-й нерабочих зон КРЛ в моменты времени t1…t11 при увеличенном масштабе;
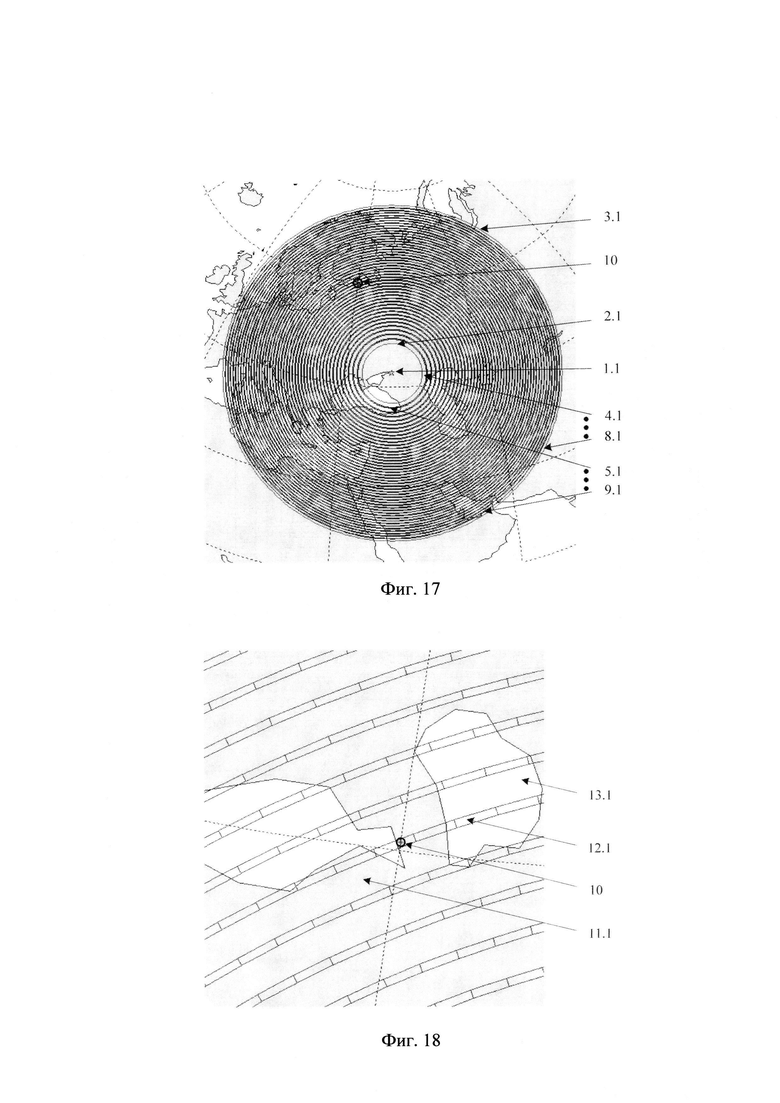
на фиг. 17 нахождение НМО в 19-й нерабочей зоне КРЛ в момент времени t1;
на фиг. 18 нахождение НМО в 19-й нерабочей зоне КРЛ момент времени t1 при увеличенном масштабе;
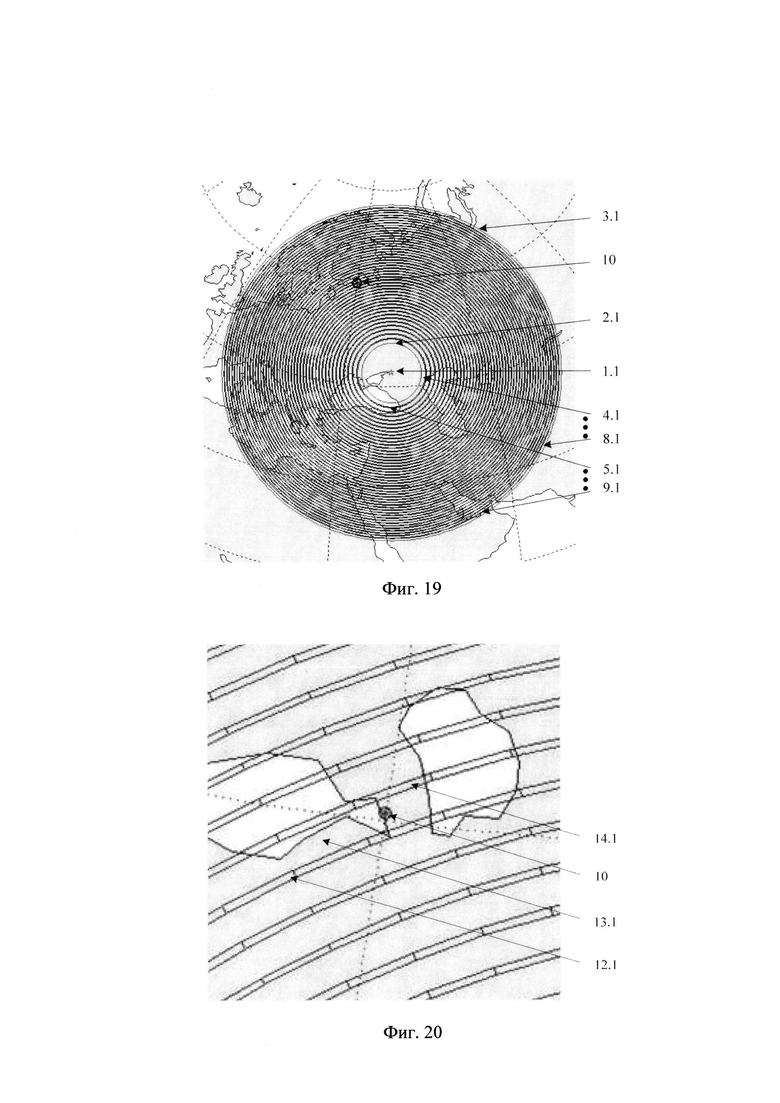
на фиг. 19 нахождение НМО в 20-й рабочей зоне КРЛ в момент времени t1;
на фиг. 20 нахождение НМО в 20-й нерабочей зоне КРЛ в момент времени t1 при увеличенном масштабе;
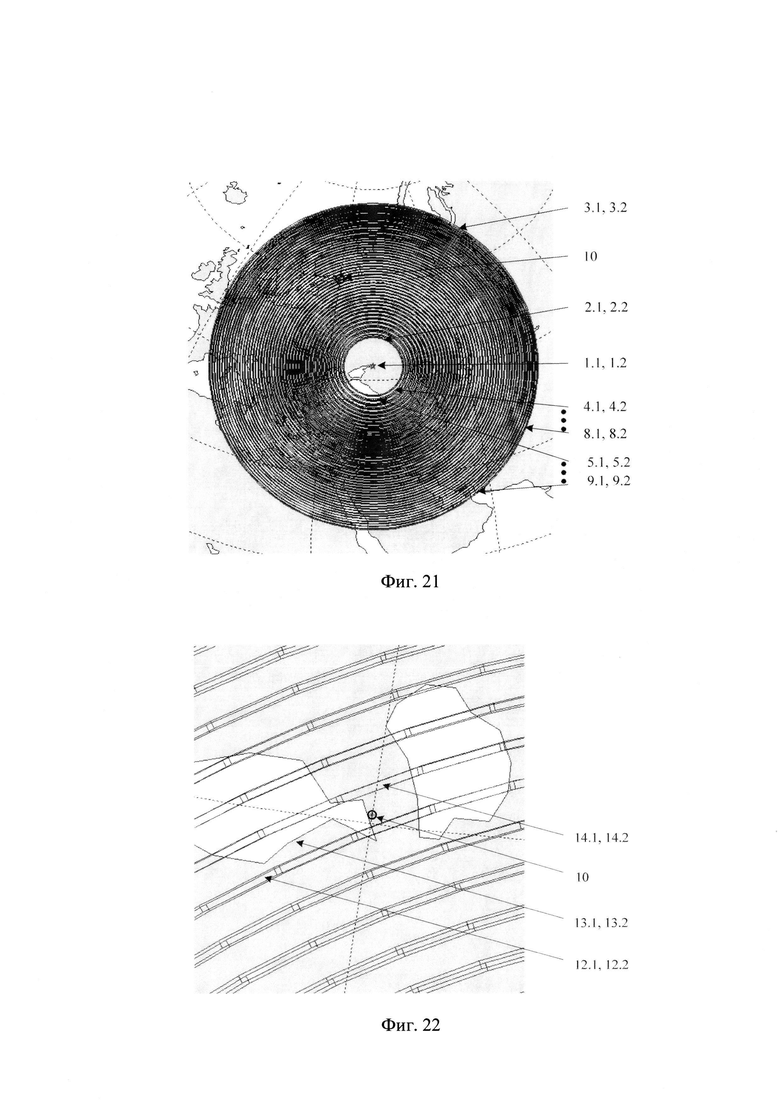
на фиг. 21 нахождение НМО в 20-й рабочей зон КРЛ в моменты времени t1 и t2;
на фиг. 22 нахождение НМО в 20-й рабочей зоне КРЛ в моменты времени t1 и t2 при увеличенном масштабе;
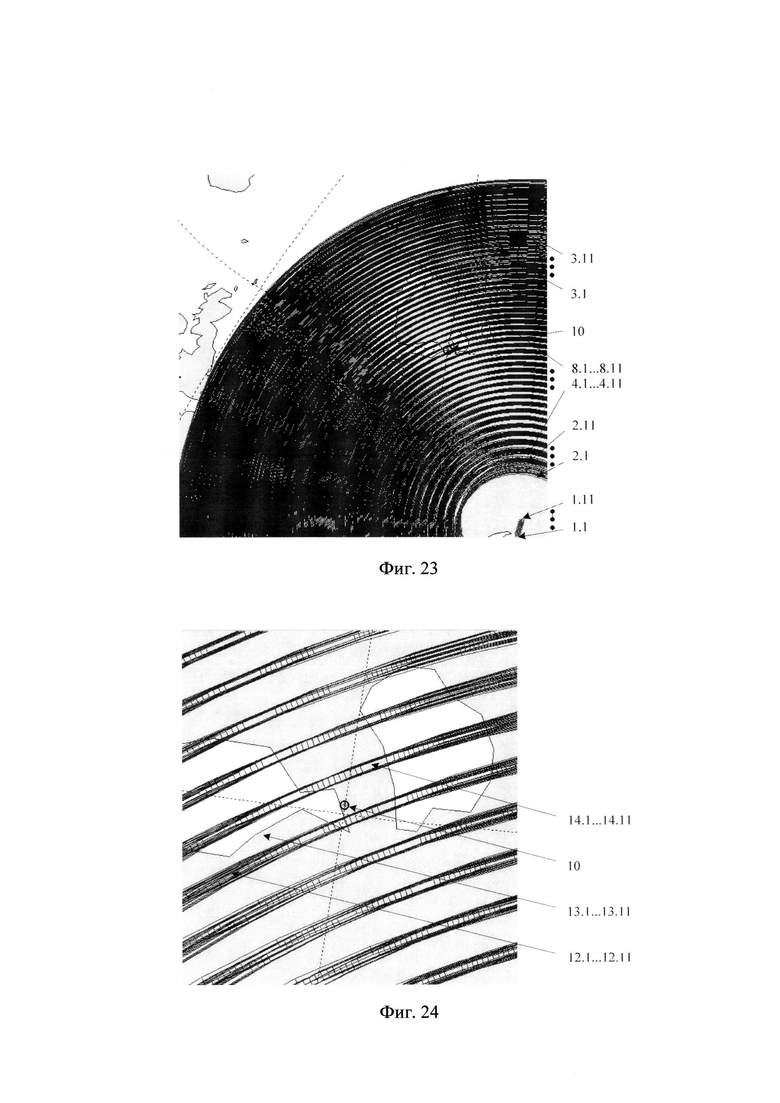
на фиг. 23 нахождение НМО в 20-й рабочей зоне КРЛ в моменты времени t1…t11;
на фиг. 24 нахождение НМО в 20-й рабочей зоне КРЛ в моменты времени t1…t11 при увеличенном масштабе;
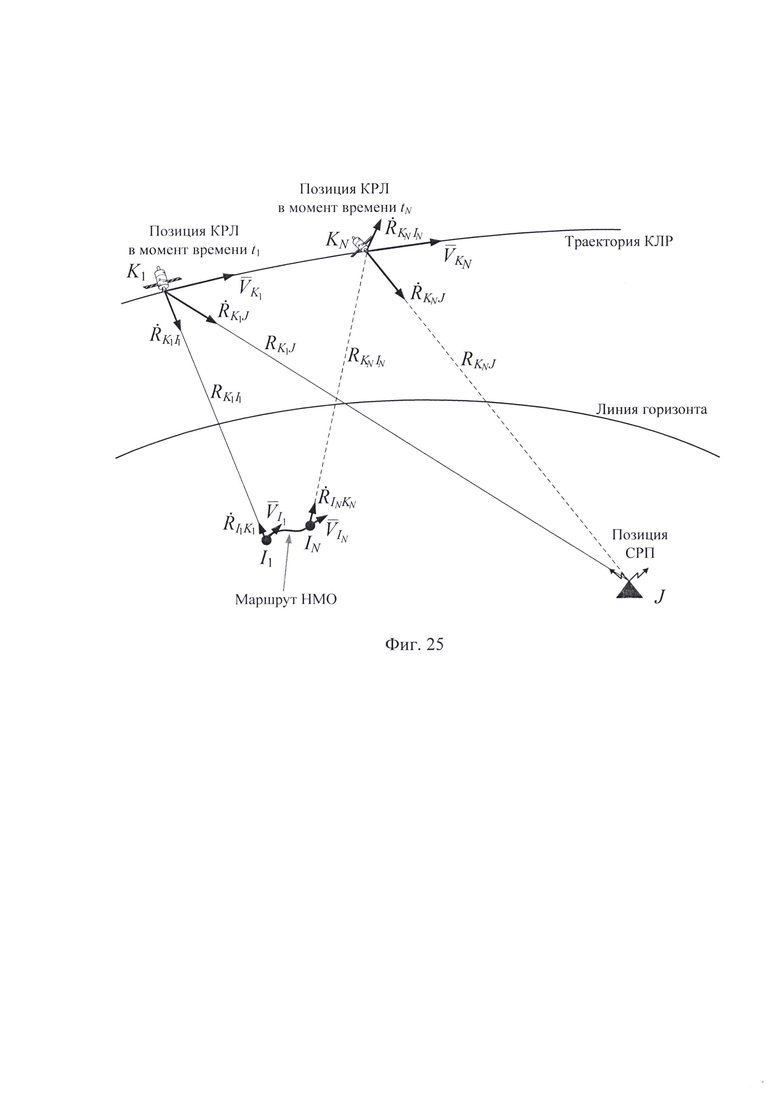
на фиг. 25 топология способа скрытия НМО от РЛН из космоса;
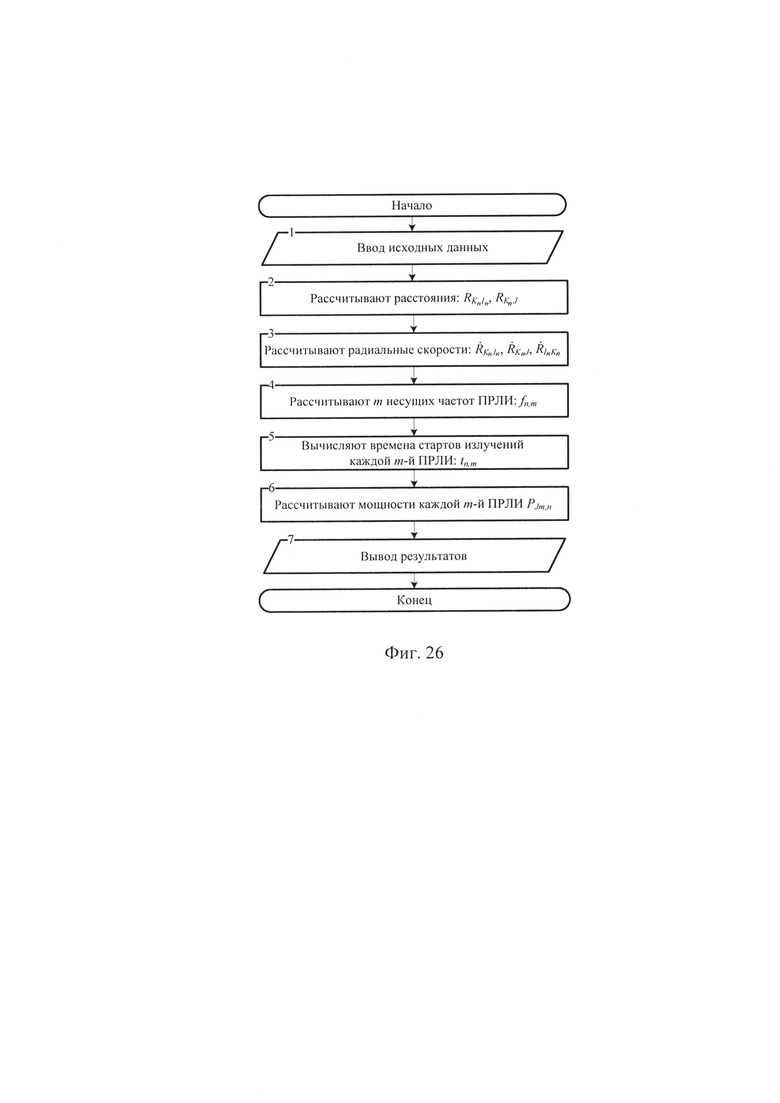
на фиг. 26 схема алгоритма расчета параметров имитирующей радиопомехи;
на фиг. 27 пример формирования имитирующей радиопомехи при М=3: а) излучение ПРЛИ аппаратурой КРЛ; б) прием ПРЛИ аппаратурой СРП; в) излучение имитирующей радиопомехи (ПРЛИ при М=3) аппаратурой СРП; г) излучение имитирующей радиопомехи (ПРЛИ при М=3) аппаратурой СРП.
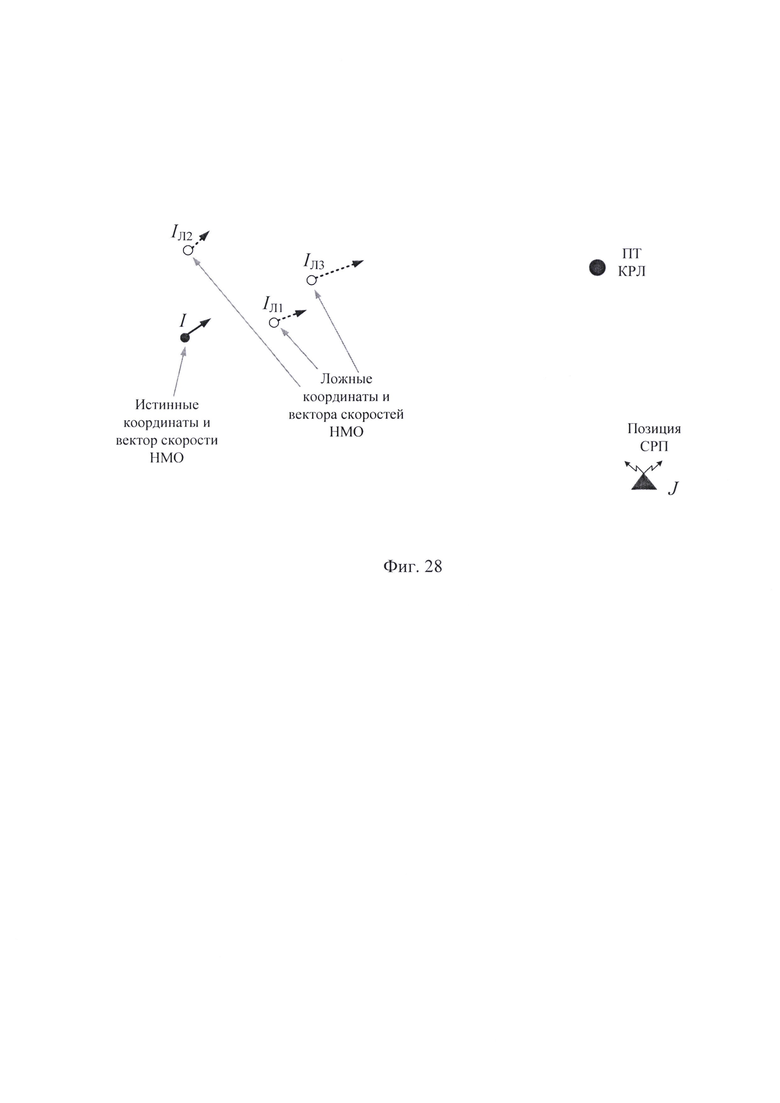
Фиг. 28 пример результата определения координат НМО и координат ложных НМО аппаратурой КРЛ в условиях применения имитирующей помехи при М=3 с отображением ПСТ КРЛ и позиции СРП.
Сущность изобретения заключается в следующем:
осуществляют построение семейства рабочих и нерабочих зон КРЛ, на основе которых вырабатывают решение о принятии мер скрытия НМО от РЛН из космоса;
принимают меры скрытия НМО от РЛН из космоса путем создания имитирующей радиопомехи с предварительно рассчитанными параметрами.
Этапы алгоритма построения семейства рабочих и нерабочих зон КРЛ, а также аналитические соотношения представлены в приложении А.
На фиг. 1 представлена геометрическая основа взаимосвязи наклонной дальности D с расстоянием от ПТ до ТО S. На фиг. 1 введены следующие обозначения:
КРЛ - космический радиолокатор;
О - центр Земли;
ПТ - подспутниковая точка;
ТО - точка отражения;
R - эквивалентный радиус Земли;
Н- высота КРЛ;
D - наклонная дальность;
S - расстояние от ПТ до ТО по дуге большого круга;
β - угол места;
γ - угол засечки под которым видно S из КРЛ;
α - угол под которым видно S из центра Земли.
При использовании системы геодезических параметров Параметры Земли 1990 года (П3-90) радиус Земли на экваторе равен - 6378 км, а на полюсах - 6356 км. Для решаемой задачи возможно в качестве поверхности Земли использовать сферу с эквивалентным радиусом Земли R, зависящем от широты ПТ [4].
Анализ фиг. 1 показывает, что существует однозначная зависимость между наклонной дальностью D и расстоянием от ПТ до ТО S, которую возможно выразить через теоремы сферической тригонометрии [5].
На фиг. 2 Геометрическая основа взаимосвязи максимальной Dmax и минимальной Dmin наклонных дальностей с углами места и βmax и βmin.
При ведении РЛН из космоса, ограничиваются максимальным βmax и минимальный βmin УМ.
Максимальный угол места βmax обусловлен тем, что при увеличении угла места снижается контрастность радиолокационных изображений. На практике максимальный угол места, обычно принимают равным 60°.
Минимальный угол места βmin ограничен большим затуханием радиосигнала на радиотрассе при малом угле места. На практике минимальный угол места, обычно принимают равным 5°.
На фиг. 2 введены следующие обозначения:
КРЛ - космический радиолокатор;
О - центр Земли;
ПТ - подспутниковая точка;
ΤΟ1 и ТО2 - точки отражения, соответствующие максимальному βmax и минимальному βmin УМ;
R - эквивалентный радиус Земли;
Η - высота КРЛ;
Dmin и Dmax - наклонные дальности, соответствующие максимальным βmax и минимальный βmin УМ;
Smin и Smax - расстояния от ПТ до ΤΟ1 и ТО2 по дуге большого круга;
βmax и βmin - максимальный и минимальный УМ;
γmax и γmin - углы засечки под которыми видны Smin и Smax из КРЛ;
αmax и αmin - углы под которыми видны Smin и Smax из центра Земли.
Аналитические соотношения взаимосвязи максимальной Dmax и минимальной Dmin наклонных дальностей с углами и βmax и βmin представлены в приложении А.
На фиг. 3 показаны ПТ 1.1, внутренняя 2.1 и внешняя границы 3.1 зон радиовидимости (ЗРВ) КРЛ в момент времени t1, с помощью математического моделирования. Здесь и далее, для иллюстрации предложенного способа, представлены результаты имитационного моделирования для частного случая, характеризующегося следующими исходными данными:
максимальный и минимальный УМ - βmax=60°, βmin=5°;
высота КРЛ в моменты времени t1…t11 - Η=1000 км;
интервал времени между измерениями - Δt=2 с;
время, затрачиваемое КРЛ на РЛН одного НМО - TРЛН=20 с;
начальное значение периода повторения импульсов - Tи=300 мкс;
начальное значение длительности импульса - τи=30 мкс;
широта и долгота ПТ КРЛ в момент времени t1 - ϕПТ1 - 47°с.ш., λПТ1=40°з.д.;
широта и долгота ПТ КРЛ в момент времени t2 - ϕПТ2=47,1°с.ш., λПТ2=40,05°з.д.;
широта и долгота ПТ КРЛ в момент времени t3 - ϕПТ3=47,2°с.ш., λПТ3=40,1°.з.д.;
широта и долгота ПТ КРЛ в момент времени t4 - ϕПТ4=47,3°с.ш., ϕПТ4=40,15°з.д.;
широта и долгота ПТ КРЛ в момент времени t5 - ϕПТ5=47,4°с.ш., λПТ5=40,20°з.д.;
широта и долгота ПТ КРЛ в момент времени t6 - ϕПТ6=47,5°с.ш., λПТ6=40,25°з.д.;
широта и долгота ПТ КРЛ в момент времени t7 - ϕПТ7=47,6°с.ш., λПТ7=40,3°з.д.;
широта и долгота ПТ КРЛ в момент времени t8 - ϕПТ8=47,7°с.ш., λПТ8=40,35°з.д.;
широта и долгота ПТ КРЛ в момент времени t9 - ϕПТ9=47,8°с.ш., λПТ9=40,4°з.д.;
широта и долгота ПТ КРЛ в момент времени t10 - ϕПТ10=47,9°с.ш., λПТ10=40,45°з.д.;
широта и долгота ПТ КРЛ в момент времени t11 - ϕПТ11=480°с.ш., λПТ11=40,5°з.д.;
широта и долгота НМО в моменты времени t1…t11 - ϕНМО=60°с.ш., λНМО=30°з.д.;
радиус Земли для ПТ КРЛ в моменты времени t1…t11 R=6366743 м.
Широты и долготы ПТ КРЛ в моменты времени t1…t11 были смоделированы исходя из высоты КРЛ.
Широта и долгота НМО в моменты времени t1…t11 выбрана одна и та же, поскольку скорость НМО на несколько порядков меньше КРЛ и его перемещением в течении TРЛН можно пренебречь.
Изменения высоты КРЛ Η и радиус Земли для ПТ КРЛ R являются медленно изменяющимися величинами, поэтому в моменты времени t1…t11 их изменения не учитывались.
Аналитические выражения для расчета расстояний Smin и.Smax, соответствующих внутренней и внешней границам ЗРВ КРЛ в момент времени t1, представлены в этапе 6 приложения А.
Наносят внутреннюю и внешнюю границы ЗРВ КРЛ в виде совокупности точек, отстоящих по дуге большого круга от ПТ КРЛ на расстояния Smin и Smax соответственно (этап 7 приложения А).
На фиг.7…24 продублированы ПТ 1.1, внутренняя 2.1 и внешняя 3.1 границы ЗРВ КРЛ в момент времени t1.
Алгоритм построения внутренних и внешних границ ЗРВ КРЛ в другие моменты отличается от рассмотренного лишь исходными данными.
На фиг. 4 представлена иллюстрация условия (2D/c=FTи) невозможности приема отраженной ПРЛИ на борт КРЛ.
В верхней части фиг. 4 показана ПРЛИ излучаемая КРЛ с длительностью τи и периодом повторения Tи: И1, И2, И3, И4, И5, …, Иi+1, Иi+2, Иi+3.
В нижней части фиг. 4 показана ПРЛИ принятая КРЛ после отражения: И'1, И'2, И'3.
Показано, что при выполнении условия 2D/c=FTи (где D - наклонная дальность, с - скорость света, F - целое положительное число) временные интервалы излучаемых Иi+1, Иi+2, Иi+3 и принимаемых И'1, И'2, И'3 импульсов совпадают, что приводит к невозможности приема отраженной ПРЛИ на борт КРЛ.
На фиг. 5 представлена иллюстрация граничного условия (2D/c-τи=FTи) возможности приема отраженной ПРЛИ на борт КРЛ.
В верхней части фиг. 5 показана ПРЛИ излучаемая КРЛ с длительностью τи и периодом повторения Tи: И1 И2, И3, И4, И5, …, Иi+1, Иi+2, Иi+3.
В нижней части фиг. 5 показана ПРЛИ принятая КРЛ после отражения: И'1, И'2, И'3.
Показано, что при выполнении граничного условия 2D/c-τи=FTи (где D - наклонная дальность, с - скорость света, F - целое положительное число) временные интервалы излучаемых Иi+1, Иi+2, Иi+3 и принимаемых И'1, И'2, И'3 импульсов не совпадают, что приводит к возможности приема отраженной ПРЛИ на борт КРЛ.
На фиг. 6 представлена иллюстрация граничного условия (2D/c+τи=FT) возможности приема отраженной ПРЛИ на борт КРЛ.
В верхней части фиг.6 показана ПРЛИ излучаемая КРЛ с длительностью τи и периодом повторения Tи: И1, И2, И3, И4, И5, …, Иi+1, Иi+2, Иi+3.
В нижней части фиг.6 показана ПРЛИ принятая КРЛ после отражения: И'1, И'2, И'3.
Показано, что при выполнении граничного условия 2D/c-τи=FTи (где D - наклонная дальность, с - скорость света, F - целое положительное число) временные интервалы излучаемых Иi+1, Иi+2, Иi+3 и принимаемых И'1, И'2, И'3 импульсов не совпадают, что приводит к возможности приема отраженной ПРЛИ на борт КРЛ.
Анализ фиг. 4…6 позволяет сделать вывод о наличии рабочих и нерабочих зон КРЛ на поверхности Земли, определяемых следующими параметрами КРЛ:
широта и долгота ПТ ϕПТ, λПТ;
радиус Земли ПТ КРЛ R;
высота КРЛ Н;
период повторения импульсов Tи;
длительность импульсов τи.
Необходимым и достаточным условием ведения РЛН с помощь КРЛ является выполнение двойного неравенства:

Аналитические выражения для расчета дальностей наклонных дальностей Lq и Кq, соответствующих внутренним и внешним границам нерабочих зон представлены в этапах 10 и 11 приложения А.
На фиг. 7 показано построение 1-й рабочей 4.1 и 1-й нерабочей 5.1 зон КРЛ в момент времени t1.
Аналитические выражения для расчета дальностей наклонных дальностей Lq и Кq, для q=1 соответствующих внутренним и внешним границам первой нерабочей зоне представлены в этапах 10 и 11 приложения А. 1-я нерабочая зона 5.1 отображена в виде заштрихованного кольца. 1-я рабочая зона 4.1 расположена между внутренней границей ЗРВ КРЛ 2.1 и 1-й нерабочей зоной 5.1 в момент времени t1.
На фиг. 8, для наглядности, показано построение 1-й рабочей 4.1 и 1-й нерабочей 5.1 зон в момент времени t1 при увеличенном масштабе.
На фиг. 9 показано построение 1-й и 2-й рабочих 4.1 и 6.1, а также 1-й и 2-й нерабочих 5.1 и 7.1 зон КРЛ в момент времени t1.
Аналитические выражения для расчета дальностей наклонных дальностей Lq и Кq, для q=1 и q=2 соответствующих внутренним и внешним границам 1-й и 2-й нерабочим зонам представлены в этапах 10 и 11 приложения А. 1-я и 2-я нерабочие зоны 5.1 и 7.1 отображена в виде заштрихованных колец. 1-я рабочая зона 4.1 расположена между внутренней границей ЗРВ КРЛ 2.1 и 1-й нерабочей зоной 5.1. 2-я рабочая зона 6.1 расположена между 1-й 5.1 и 2-й 7.1 нерабочими зонами в момент времени t1.
На фиг. 10, для наглядности, показано построение 1-й и 2-й рабочих 4.1 и 6.1, а также 1-й и 2-й нерабочих зон 5.1 и 7.1 в момент времени t1 при увеличенном масштабе.
На фиг. 11 показано построение 1…46-й рабочих, 1…45-й нерабочих зон КРЛ в момент времени t1. На фиг. 11 введены обозначения: 46-й рабочей зоны 8.1, 45-й нерабочих зоны 9.1 в момент времени t1.
Аналитические выражения для расчета дальностей наклонных дальностей Lq и Kq, для q=1…45 соответствующих внутренним и внешним границам 1…45-й нерабочим зонам представлены в этапах 10 и 11 приложения А. 1…45-я нерабочие зоны отображена в виде заштрихованных колец. 1-я рабочая зона расположена между внутренней границей ЗРВ КРЛ 2.1 и 1-й нерабочей зоной 5.1. 2…45-я рабочие зоны расположены между нерабочими зонами. 46-я рабочая зона 8.1 расположена между 45-й нерабочей зоной 9.1 и внешней границей ЗРВ КРЛ 3.1 в момент времени t1.
В общем случае количество рабочих (нерабочих) зон КРЛ Q может быть различным и зависит от следующих параметров:
высота КРЛ Н;
максимальный и минимальный УМ βmax и βminт;
периода повторения импульсов Tи;
длительность импульса τи.
Аналитические выражения для расчета количество рабочих (нерабочих) зон КРЛ Q представлено в этапе 8 приложения А.
На фиг. 12, для наглядности, показано построение 1…46-й рабочих, 1…45-й нерабочих зон в момент времени t1 при увеличенном масштабе.
На фиг. 13 показано построение 1…46-х рабочих, 1…45-х нерабочих зон КРЛ в моменты времени t1 и t2. На фиг. 13 введены обозначения: ПТ 1.2, внутренняя 2.2 и внешняя граница 3.2 ЗРВ КРЛ, 1-я рабочая зона 4.2, 1-я нерабочая зона 5.2, 46-я рабочая зона 8.2, 45-я нерабочая зона 9.2 в момент времени t2.
КРЛ в моменты времени t1 и t2 находится в различных точках пространства, поскольку за интервал времени между измерениями Δt=2 с КРЛ перемещается. Следовательно перемещаются рабочие и нерабочие зоны КРЛ.
Аналитические выражения для расчета дальностей наклонных дальностей Lq и Кq, для q=1…45 соответствующих внутренним и внешним границам 1…45-x нерабочих зон представлены в этапах 10 и 11 приложения А. 1…45-е нерабочие зоны отображена в виде заштрихованных колец. Каждая 1-я рабочая зона расположена между внутренней границей ЗРВ КРЛ и 1-й нерабочей зоной. Каждые 2…45-е рабочие зоны расположены между нерабочими зонами. Каждая 46-я рабочая зона расположена между 45-й нерабочей зоной и внешней границей ЗРВ КРЛ в моменты времени t1 и t2.
На фиг. 14, для наглядности, показано построение рабочих, и нерабочих зон в моменты времени t1 и t2 при увеличенном масштабе. На фиг. 14 видно, что нерабочие зоны сдвинулись вдоль траектории движения КРЛ, а геометрические размеры рабочих зон уменьшились. На фиг. 14 введены обозначения: 2-я рабочая зона 6.2, 2-я нерабочая зона 7.2 в момент времени t2.
На фиг. 15 показано построение 1…46-х рабочих, 1…45-х нерабочих зон КРЛ в моменты времени t1…t11. На фиг. 13 введены обозначения: ПТ 1.11 в момент времени t11, внутренние 2.1…2.11 и внешние границы 3.1…3.11 ЗРВ КРЛ, 1-е рабочие зоны 4.1…4.11, 1-е нерабочие зоны 5.1…5.11, 46-е рабочие зоны 8.1…8.11, 45-е нерабочие зоны 9.1…9.11 в моменты времени t1…t11.
КРЛ в моменты времени t1…t11 находится в различных точках пространства, поскольку за каждый интервал времени между измерениями Δt=2 с КРЛ перемещается. Следовательно перемещаются рабочие и нерабочие зоны КРЛ.
Аналитические выражения для расчета дальностей наклонных дальностей Lq и Кq, для q=1…45 соответствующих внутренним и внешним границам 1…45-х нерабочих зон представлены в этапах 10 и 11 приложения А. Каждая 1…45-я нерабочие зоны отображена в виде заштрихованных колец. Каждая 1-я рабочая зона расположена между внутренней границей ЗРВ КРЛ и 1-й нерабочей зоной. Каждые 2…45-е рабочие зоны расположены между нерабочими зонами. Каждая 46-я рабочая зона расположена между 45-й нерабочей зоной и внешней границей ЗРВ КРЛ.
На фиг. 16, для наглядности, показано построение 1…46-х рабочих и 1…45-й нерабочих зон КРЛ в моменты времени t1…t11 при увеличенном масштабе. На фиг. 16 видно, что нерабочие зоны сдвинулись вдоль траектории движения КРЛ, а геометрические размеры рабочих зон уменьшились.
На фиг. 17 показано нахождение НМО 10 в 19-й нерабочей зоне КРЛ в момент времени t1. На фиг. 17 помимо построенных 1…46-й рабочих, 1…45-й нерабочих зон КРЛ в момент времени t1 отображен выбранный НМО 10.
На фиг. 18 показано нахождение НМО 10 в 19-й нерабочей зоне 12.1 КРЛ момент времени t1 при увеличенном масштабе. На фиг. 18 введены обозначения: 19-я рабочая зона 11.1, 19-я нерабочая зона 12.1, 20-я рабочая зона 13.1, в момент времени t1.
Анализ фиг. 17 и фиг. 18 позволяет сделать вывод, что КРЛ не сможет вести РЛН в отношении НМО, поскольку излучение и прием импульсов с избранными периодом повторения и длительностью происходит в одно и то же время, что невозможно реализовать.
Для того, чтобы КРЛ мог вести РЛН необходимо и достаточно выполнение двойного неравенства (2). Следовательно выбранные в качестве начальных условий τи и/или Tи необходимо изменить и подобрать их таким образом, чтобы двойное неравенство (1) выполнялось.
На фиг. 19 показано нахождение НМО 10 в 20-й рабочей зоне КРЛ в момент времени t1; Это произошло в результате подбора τи и Tи таким образом, чтобы двойное неравенство (1) было верным.
На фиг. 20 показано нахождение НМО 10 в 20-й нерабочей зоне КРЛ в момент времени t1 при увеличенном масштабе. На фиг. 20 введено обозначение: 20-я нерабочая зона 14.1 в момент времени t1.
Важно, чтобы двойное неравенство (1) выполнялось в течении всего времени, затрачиваемого КРЛ на РЛН один НМО ТРЛН.
На фиг. 21 показано нахождение НМО 10 в 20-х рабочих зонах КРЛ в моменты времени t1 и t2. Это произошло в результате подбора τи и Tи для моментов времени t1 и t2 таким образом, чтобы двойное неравенство (1) было верным.
На фиг. 22 показано нахождение НМО 10 в 20-х нерабочих зонах КРЛ в моменты времени t1 и t2 при увеличенном масштабе. На фиг. 22 введены обозначения: 19-я нерабочая зона 12.2, 20-я рабочая зона 13.2, 20-я нерабочая зона 14.2 в момент времени t2.
На фиг. 23 показано нахождение НМО 10 в 20-х рабочих зонах КРЛ в моменты времени t1…t11. Это произошло в результате подбора τи и Tи для моментов времени t1…t11 таким образом, чтобы двойное неравенство (1) было верным.
На фиг. 24 показано нахождение НМО 10 в 20-х рабочих зонах 13.1…13.11 КРЛ в моменты времени t1…t11 при увеличенном масштабе. На фиг. 24 введены обозначения: 19-е нерабочие зоны 12.1…12.11, 20-е рабочие зоны 13.1…13.11, 20-е нерабочие зоны 14.1…14.11 в моменты времени t1…t11.
Рассмотренный частный случай приведен для иллюстрации построения семейства рабочих и нерабочих зон КРЛ.
Если НМО находится в одной из рабочих зон КРЛ во все моменты времени tn, принимают меры скрытия НМО от РЛН из космоса с использованием СРП за счет излучения имитирующей радиопомехи с предварительно рассчитанными параметрами.
На фиг. 25 схематически представлена топология способа скрытия НМО от РЛН из космоса.
На фиг. 25 введены следующие обозначения: К1 - позиция КРЛ в момент времени t1; KN - позиция КРЛ в момент времени tN, I1 - позиция НМО в момент времени t1, IN - позиция НМО в момент времени tN; J - позиция СРП;  - расстояние между КРЛ К1 и НМО I1 в момент времени t1;
- расстояние между КРЛ К1 и НМО I1 в момент времени t1;  - расстояние между КРЛ К1 и СРП J в момент времени t1;
- расстояние между КРЛ К1 и СРП J в момент времени t1;  - расстояние между КРЛ KN и НМО IN в момент времени tN;
- расстояние между КРЛ KN и НМО IN в момент времени tN;  - расстояние между КРЛ KN и СРП J в момент времени tN;
- расстояние между КРЛ KN и СРП J в момент времени tN;  - вектор скорости КРЛ в момент времени t1;
- вектор скорости КРЛ в момент времени t1;  - вектор скорости КРЛ в момент времени
- вектор скорости КРЛ в момент времени  - радиальная скорость КРЛ К1 в направлении НМО I1 в момент времени t1;
- радиальная скорость КРЛ К1 в направлении НМО I1 в момент времени t1;  - радиальная скорость КРЛ К1 в направлении СРП J в момент времени t1;
- радиальная скорость КРЛ К1 в направлении СРП J в момент времени t1;  - радиальная скорость КРЛ KN в направлении НМО IN в момент времени tN;
- радиальная скорость КРЛ KN в направлении НМО IN в момент времени tN;  - радиальная скорость КРЛ KN в направлении СРП J в момент времени tN;
- радиальная скорость КРЛ KN в направлении СРП J в момент времени tN;  - вектор скорости НМО в момент времени t1;
- вектор скорости НМО в момент времени t1;  - вектор скорости НМО в момент времени tN;
- вектор скорости НМО в момент времени tN;  - радиальная скорость НМО I1 в направлении КРЛ в момент времени t1;
- радиальная скорость НМО I1 в направлении КРЛ в момент времени t1;  - радиальная скорость НМО In в направлении КРЛ KN в момент времени tN;
- радиальная скорость НМО In в направлении КРЛ KN в момент времени tN;
На на фиг. 26 представлена схема алгоритма расчета параметров имитирующей радиопомехи этапы которого раскрыты в приложении Б.
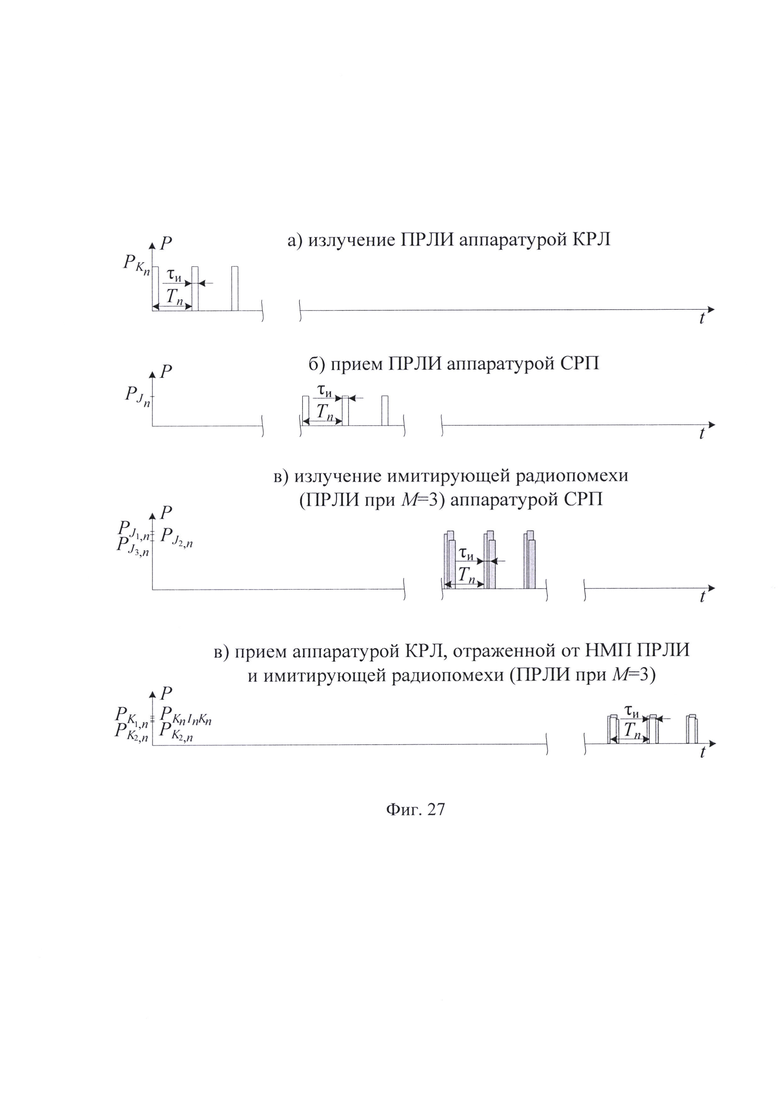
На фиг. 27 представлен пример формирования имитирующей радиопомехи при М=3: а) излучение ПРЛИ аппаратурой КРЛ; б) прием ПРЛИ аппаратурой СРП; в) излучение имитирующей радиопомехи (ПРЛИ при М=3) аппаратурой СРП; г) излучение имитирующей радиопомехи (ПРЛИ при М=3) аппаратурой СРП.
На фиг. 27а представлен фрагмент ПРЛИ излучаемый аппаратурой КРЛ с периодом Tи, длительностью импульса τи и мощностью 
На фиг. 27б представлен фрагмент ПРЛИ принимаемый аппаратурой СРП с периодом Ти, длительностью импульса τи и мощностью 
На фиг. 27в представлены фрагменты трех (М=3) ПРЛИ (имитирующей радиопомехи) излучаемых аппаратурой СРП с периодом Tи, длительностью импульса τи и мощностями  соответственно.
соответственно.
На фиг. 27г представлены фрагменты ПРЛИ отраженной от НМО и трех (М=3) ПРЛИ (имитирующей радиопомехи) принимаемых аппаратурой КРП с периодом Tи, длительностью импульса τи и мощностями 
 соответственно.
соответственно.
Фиг. 28 представлен пример результата определения координат НМО I и координат ложных НМО IЛ1, IЛ2 и IЛ3 аппаратурой КРЛ в условиях применения имитирующей помехи при М=3 с отображением ПТ КРЛ и позиции СРП J. Ложных НМО характеризуются как неправильными координатами, так и неправильными векторами скоростей.
Совместное имитационное моделирование заявленного способа скрытия НМО от РЛН из космоса и способа прототипа показало возможность сокращения времени преодоления НМО выбранного маршрута в условиях защиты от РЛН из космоса на 30…50% за счет своевременного выявления факта нахождения НМО в одной из рабочих зон КРЛ и принятия мер скрытия путем создания имитирующей радиопомехи с рассчитанными параметрами.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Белоусов А.В., Болкунов А.А., Ивойлов В.Ф., Пашук М.Ф., Саркисьян А.П., Хакимов Т.М. Способ защиты мобильных объектов от радиолокационных средств разведки и наведения оружия. Патент на изобретение RUS №2577843 от 20.03.2016.
2. Полетаев A.M. Способ скрытия мобильного объекта от радиолокационного наблюдения из космоса. Патент на изобретение RUS №2312297 от 10.12.2007.
3. Агиевич С.Н., Дружков А.А., Рыжков Е.В., Севидов В.В., Малыгин И.Ю., Пономарев А.А., Шкуратов Р.А.. Способ скрытия мобильного объекта от радиолокационного наблюдения из космоса. Патент на изобретение RUS №2730374 от 21.08.2020.
4. Волков Р.В., Севидов В.В., Богдановский С.В., Теслевич С.Ф. Модель поверхности Земли при определении местоположения земной станции по сигналам спутников-ретрансляторов. Наукоемкие технологии. 2016. Т. 17. №12. С. 44-50.
5. Волков Р.В., Ремнев Р.С., Севидов В.В. Применение теорем сферической тригонометрии в координатометрии. В сборнике: Инновационная деятельность в Вооруженных Силах Российской Федерации. Труды всеармейской научно-практической конференции. 2015. С. 81-84.
6. Балабанов В.В., Беспалов В.Л., Кельян А.Х., Пономарев А.А., Севидов В.В., Чемаров А.О. Способ определения параметров орбиты искусственного спутника Земли. Патент РФ №2652603 МПК G01S 5/00 (2006.01) Бюл. №12 от 27.04.18 по заявке №2017121725 от 20.06.2017.
7. Агиевич С.Н., Беспалов В.Л., Ледовская Э.Г., Матюхин А.С., Подъячев П.А., Севидов В.В. Способ определения параметров орбиты искусственного спутника Земли с использованием приемных опорных реперных станций. Патент РФ №2702098 по заявке №2018127491 от 25.07.18.
8. Радиолокационные системы: учебник / В.П. Бердышев, Е.Н. Гарин, А.Н. Фомин [и др.]; под общ. ред. В.П. Бердышева. - Красноярск: Сиб. федер. ун-т. - 2011. - 400 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2023 |
|
RU2825020C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2019 |
|
RU2730374C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ НЕ МЕНЕЕ ДВУХ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2684740C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ СПУТНИКА-РЕТРАНСЛЯТОРА НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2679890C1 |
| КОСМИЧЕСКИЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЮЩИЙ ИЗОБРАЖЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ | 1999 |
|
RU2158008C1 |
| Способ позиционирования подвижного объекта | 2017 |
|
RU2656361C1 |
| СПОСОБ СКРЫТИЯ МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2006 |
|
RU2312297C1 |
| УСТАНОВКА-ИМИТАТОР ОТРАЖЕННЫХ СИГНАЛОВ МАЛЫХ ДАЛЬНОСТЕЙ | 2004 |
|
RU2275653C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ В ОБЗОРНЫХ РАДИОЛОКАТОРАХ ЗА СЧЕТ ИСПОЛЬЗОВАНИЯ КОГЕРЕНТНЫХ СВОЙСТВ ОТРАЖЕННЫХ СИГНАЛОВ | 2009 |
|
RU2416105C1 |
Изобретение относится к области маскировки наземных мобильных объектов (НМО) от космических систем радиолокационного наблюдения. Техническим результатом изобретения является сокращение времени преодоления НМО выбранного маршрута в условиях защиты от радиолокационного наблюдения из космоса за счет своевременного выявления факта нахождения НМО в одной из рабочих зон космического радиолокатора (КРЛ) и принятия мер скрытия НМО от радиолокационного наблюдения из космоса путем излучения имитирующей радиопомехи с предварительно рассчитанными параметрами с помощью аппаратуры станции радиопомех. Заявленный способ скрытия НМО от радиолокационного наблюдения из космоса включает прием радиосигналов от КРЛ в N≥2 моментов времени tn, где n=1…N, определение координат КРЛ для каждого момента времени tn, измерение длительности импульса τи, измерение периодов повторения импульсов Тn, построении семейства рабочих и нерабочих зон относительно каждого положения КРЛ. В случае, если НМО находится в одной из рабочих зон КРЛ во все моменты времени tn, применяют меры его скрытия от радиолокационного наблюдения из космоса, а именно, рассчитывают параметры имитирующей радиопомехи и излучают имитирующую радиопомеху с помощью аппаратуры станции радиопомех. 5 з.п. ф-лы, 28 ил.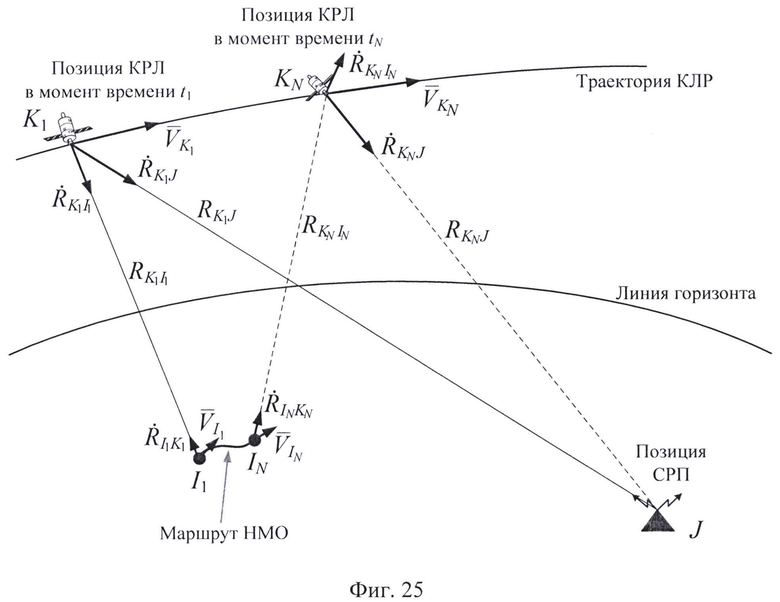
1. Способ скрытия наземного мобильного объекта (НМО) от радиолокационного наблюдения (РЛН) из космоса, заключающийся в том, что рассчитывают период времени нахождения НМО в зоне радиовидимости (ЗРВ) космического радиолокатора (КРЛ) на основе априорно известных географического расположения маршрута движения НМО и параметров орбиты КРЛ, в период времени нахождения НМО в ЗРВ КРЛ принимают радиосигналы от КРЛ в N≥2 моментов времени tn, где п - 1…N, определяют координаты КРЛ  для каждого момента времени tn на основе априорно известных параметров его орбиты, измеряют длительность радиолокационного импульса (РЛИ) τи, измеряют периоды повторения последовательности радиолокационных импульсов (ПРЛИ) Tn для каждого момента времени tn, отображают на карте внутренние и внешние границы радиовидимости КРЛ для каждого момента времени tn, используя предварительно заданные минимальный и максимальный углы места КРЛ, отображают на карте семейство рабочих и нерабочих зон КРЛ для каждого момента времени tn, в случае, если НМО находится в одной из рабочих зон КРЛ во все моменты времени tn, применяют меры скрытия НМО от РЛН из космоса, отличающийся тем, что дополнительно устанавливают станцию радиопомех (СРП) J на земной поверхности с известными координатами, в ходе преодоления маршрута наземным мобильным объектом измеряют текущие координаты
для каждого момента времени tn на основе априорно известных параметров его орбиты, измеряют длительность радиолокационного импульса (РЛИ) τи, измеряют периоды повторения последовательности радиолокационных импульсов (ПРЛИ) Tn для каждого момента времени tn, отображают на карте внутренние и внешние границы радиовидимости КРЛ для каждого момента времени tn, используя предварительно заданные минимальный и максимальный углы места КРЛ, отображают на карте семейство рабочих и нерабочих зон КРЛ для каждого момента времени tn, в случае, если НМО находится в одной из рабочих зон КРЛ во все моменты времени tn, применяют меры скрытия НМО от РЛН из космоса, отличающийся тем, что дополнительно устанавливают станцию радиопомех (СРП) J на земной поверхности с известными координатами, в ходе преодоления маршрута наземным мобильным объектом измеряют текущие координаты  и ортогональные составляющие вектора скорости НМО
и ортогональные составляющие вектора скорости НМО  для каждого момента времени tn, передают в СРП по средствам связи текущие координаты
для каждого момента времени tn, передают в СРП по средствам связи текущие координаты  и ортогональные составляющие вектора скорости НМО
и ортогональные составляющие вектора скорости НМО  для каждого момента времени tn, рассчитывают расстояния между КРЛ и НМО
для каждого момента времени tn, рассчитывают расстояния между КРЛ и НМО  а также между КРЛ и СРП
а также между КРЛ и СРП  для каждого момента времени tn, измеряют мощности ПРЛИ
для каждого момента времени tn, измеряют мощности ПРЛИ  для каждого момента времени tn, измеряют несущие частоты ПРЛИ
для каждого момента времени tn, измеряют несущие частоты ПРЛИ  для каждого момента времени tn, рассчитывают радиальные скорости КРЛ относительно НМО
для каждого момента времени tn, рассчитывают радиальные скорости КРЛ относительно НМО  и СРП
и СРП  а также НМО относительно КРЛ
а также НМО относительно КРЛ  для каждого момента времени tn, определяют ортогональные составляющие векторов скорости КРЛ
для каждого момента времени tn, определяют ортогональные составляющие векторов скорости КРЛ  для каждого момента времени tn на основе априорно известных параметров его орбиты, если НМО находится в одной из рабочих зон КРЛ во все моменты времени tn, принимают меры скрытия НМО от РЛН из космоса с использованием СРП за счет излучения имитирующей радиопомехи, которая представляет собой М≥1 ПРЛИ, при этом длительности РЛИ каждой ПРЛИ выбирают равными измеренной длительности РЛИ τи, периоды каждой ПРЛИ выбирают равными измеренным периодам повторения ПРЛИ Tn для каждого момента времени tn, несущие частоты ПРЛИ
для каждого момента времени tn на основе априорно известных параметров его орбиты, если НМО находится в одной из рабочих зон КРЛ во все моменты времени tn, принимают меры скрытия НМО от РЛН из космоса с использованием СРП за счет излучения имитирующей радиопомехи, которая представляет собой М≥1 ПРЛИ, при этом длительности РЛИ каждой ПРЛИ выбирают равными измеренной длительности РЛИ τи, периоды каждой ПРЛИ выбирают равными измеренным периодам повторения ПРЛИ Tn для каждого момента времени tn, несущие частоты ПРЛИ  для каждого момента времени tn вычисляют на основе измеренных несущих частот ПРЛИ
для каждого момента времени tn вычисляют на основе измеренных несущих частот ПРЛИ  и рассчитанных радиальных скоростей КРЛ относительно НМО
и рассчитанных радиальных скоростей КРЛ относительно НМО  КРЛ относительно СРП
КРЛ относительно СРП  и НМО относительно КРЛ
и НМО относительно КРЛ  моменты стартов излучений каждой m-й ПРЛИ
моменты стартов излучений каждой m-й ПРЛИ  вычисляют на основе рассчитанных расстояний между КРЛ и НМО
вычисляют на основе рассчитанных расстояний между КРЛ и НМО  а также расстояний между КРЛ и СРП
а также расстояний между КРЛ и СРП  для каждого момента времени tn, мощности каждой ПРЛИ
для каждого момента времени tn, мощности каждой ПРЛИ  рассчитывают с учетом измеренных мощностей ПРЛИ
рассчитывают с учетом измеренных мощностей ПРЛИ  и рассчитанных расстояний между КРЛ и НМО
и рассчитанных расстояний между КРЛ и НМО  а также расстояний между КРЛ и СРП
а также расстояний между КРЛ и СРП  для каждого момента времени tn.
для каждого момента времени tn.
2. Способ по п.1, отличающийся тем, что периоды повторения ПРЛИ Tn для каждого момента времени tn измеряют, используя усреднение по пачке ПРЛИ, содержащей не менее десяти одиночных РЛИ.
3. Способ по п.1, отличающийся тем, что на карте внутренние и внешние границы радиовидимости КРЛ для каждого момента времени tn отображают, учитывая модель Земли в виде сферы эквивалентного радиуса, соответствующего широте подспутниковой точки КРЛ.
4. Способ по п.1, отличающийся тем, что границы рабочих и нерабочих зон КРЛ для каждого момента времени tn отображают, учитывая модель Земли в виде сферы эквивалентного радиуса, соответствующего широте подспутниковой точки КРЛ на основе предварительно рассчитанных наклонных дальностей, соответствующих внешним и внутренним границам этих зон.
5. Способ по п.1, отличающийся тем, что измерения длительности РЛИ τи, периодов повторения ПРЛИ Tn, несущих частот ПРЛИ  мощностей ПРЛИ
мощностей ПРЛИ  производят с помощью аппаратуры СРП J.
производят с помощью аппаратуры СРП J.
6. Способ по п.1, отличающийся тем, что расчеты расстояний между КРЛ и НМО  расстояний между КРЛ и СРП
расстояний между КРЛ и СРП  радиальных скоростей КРЛ относительно НМО
радиальных скоростей КРЛ относительно НМО  и СРП
и СРП  НМО относительно КРЛ
НМО относительно КРЛ  а также параметров имитирующей радиопомехи производят с помощью аппаратуры СРП J.
а также параметров имитирующей радиопомехи производят с помощью аппаратуры СРП J.
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2019 |
|
RU2730374C1 |
| СПОСОБ СКРЫТИЯ НАЗЕМНОГО МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2012 |
|
RU2493530C1 |
| СПОСОБ СКРЫТИЯ МОБИЛЬНОГО ОБЪЕКТА ОТ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2006 |
|
RU2312297C1 |
| СПОСОБ ЗАЩИТЫ МОБИЛЬНЫХ ОБЪЕКТОВ ОТ РАДИОЛОКАЦИОННЫХ СРЕДСТВ РАЗВЕДКИ И НАВЕДЕНИЯ ОРУЖИЯ | 2015 |
|
RU2577843C1 |
| Способ создания преднамеренных активных сигналоподобных имитационных помех радиоэлектронным средствам | 2018 |
|
RU2694366C1 |
| СПОСОБ СНИЖЕНИЯ ЗАМЕТНОСТИ ПОДВИЖНОГО ОБЪЕКТА ДЛЯ ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМ НАБЛЮДЕНИЯ ИЗ КОСМОСА | 2008 |
|
RU2373481C1 |
| CN 106646398 A, 10.05.2017 | |||
| WO 2017133998 A1, 10.08.2017 | |||
| CN 103760532 A, 30.04.2014 | |||
| US 7821623 B2, 26.10.2010. | |||

