Изобретение относится к области систем автоматического управления динамическими объектами широкого класса с неизвестными переменными параметрами и неконтролируемыми возмущениями.
Прототипом предлагаемого изобретения является беспоисковая адаптивная система управления с идентификатором и неявной эталонной моделью, описанная в изобретении [1]. Структурная схема адаптивной системы управления для объектов с неконтролируемыми возмущениями включает в себя сумматор, два регулятора (один в прямой и один в обратной связи), фильтр низких частот, объект управления и контур адаптации. Последний, в свою очередь, состоит из блока текущей идентификации, блока априорной информации о матрице эффективности управления объекта и блока настройки регуляторов.
Рассмотрим построение такой системы управления для следующей задачи. Пусть объект управления (ОУ) описывается следующим матричным дифференциальным уравнением
где x∈Rn - непосредственно измеряемый вектор состояния ОУ; u∈Rm - вектор управления (в дальнейшем - закон управления); f - вектор неконтролируемых внешних возмущений, ограниченный по норме; А, В и D - матрицы неизвестных параметров ОУ с соответствующими размерностями, в общем случае переменные;  - непосредственно измеряется или аналитически вычисляется по х.
- непосредственно измеряется или аналитически вычисляется по х.
Адаптивная система должна формировать такой закон управления, чтобы ОУ вел себя подобно эталонной модели, которая задана неявным образом в виде следующего дифференциального уравнения
где хм - вектор состояния модели; uм - ограниченное по норме входное воздействие модели; размерности соответствуют уравнению (1); Ам и Вм - матрицы параметров модели в общем случае переменные, причем оператор Ам - асимптотически устойчивый.
Точный закон управления можно найти только тогда, когда выполнено условие полного соответствия моделей [2]
rankB=rank{B, Ам-А)=rank(B, Вм)=rank(B, D)
или, что тождественно
ВВ+(Ам-А)=Ам-А; ВВ+Вм=Вм; ВВ+D=D, (3)
где В+ - псевдообратная матрица к В. При выполнении условия (3) управление, которое назовем точным,
u*=B+[(Aм-А)х+Вмuм-Df] (4)
обеспечит асимптотические свойства ошибки адаптации е=х-хм. Действительно, подставляя закон (4) в уравнение (1), учитывая (3) и вычитая из результата уравнение (2), получим уравнение ошибки адаптации
е(0)=е0=x0-xм0.
Однако по условию матрицы А, В и D неизвестны и внешние возмущения не измеряются, поэтому вместо (4) используется закон управления
где  и
и  - оценки матриц А и В, доставляемые блоком текущей идентификации.
- оценки матриц А и В, доставляемые блоком текущей идентификации.
В работах [1-5] сформулированы условия, при которых достигается цель адаптации (e-->0 с течением времени) при использовании закона (5). При этом требования асимптотической точности выдаваемых идентификатором оценок ( -->А,
-->А,  -->В) и отсутствия неконтролируемых внешних возмущений (Df≡0) являются необязательными.
-->В) и отсутствия неконтролируемых внешних возмущений (Df≡0) являются необязательными.
Остановимся на условиях, сформулированных в работах [1, 5], рассматривая вопрос адаптации в непрерывной постановке при наличии неконтролируемых внешних возмущений. В качестве алгоритма текущей идентификации будем использовать алгоритм типа стохастической аппроксимации, который в непрерывной постановке описывается следующим образом [6]
где: C = [A,B];  - невязка, называемая в дальнейшем ошибкой идентификации (не путать с ошибкой оценивания параметров системы); xT p=[xT, uT] - расширенный вектор состояния ОУ; Г - в общем случае переменная положительно определенная квадратная матрица размерностью [n+m) или скаляр; следующие нормы векторов и матриц ограничены
- невязка, называемая в дальнейшем ошибкой идентификации (не путать с ошибкой оценивания параметров системы); xT p=[xT, uT] - расширенный вектор состояния ОУ; Г - в общем случае переменная положительно определенная квадратная матрица размерностью [n+m) или скаляр; следующие нормы векторов и матриц ограничены  что справедливо для подавляющего большинства прикладных задач. В работе [1] показано, что при достаточно большой норме матрицы Г с течением времени ε-->0, причем без каких-либо дополнительных условий, в отличии от оценок параметров, сходимость которых к истинным значениям требует соблюдения целого ряда условий, в том числе отсутствия неконтролируемых внешних возмущений [6].
что справедливо для подавляющего большинства прикладных задач. В работе [1] показано, что при достаточно большой норме матрицы Г с течением времени ε-->0, причем без каких-либо дополнительных условий, в отличии от оценок параметров, сходимость которых к истинным значениям требует соблюдения целого ряда условий, в том числе отсутствия неконтролируемых внешних возмущений [6].
В связи с указанным свойством ошибки идентификации в работах [1,5] предлагается найти зависимость ошибки адаптации е от ошибки идентификации ε. Пропуская промежуточные преобразования, приведем выражения, полученные в [1, 5], справедливые для управления, определяемого по закону (5)

Уравнение (8) показывает, что его выражение в квадратных скобках всегда ортогонально строкам матрицы  , или согласно свойствам псевдообратной матрицы - столбцам матрицы
, или согласно свойствам псевдообратной матрицы - столбцам матрицы  [7]. При выполнении условий [1]
[7]. При выполнении условий [1]
или
из выражения (8) следует
B(u-u*) = Kε, (11)
где матрица К имеет ограниченную норму.
Из выражений (7), (11) следует, что при выполнении хотя бы одного из условий (9) или (10) искомое уравнение связи ошибки адаптации и ошибки идентификации имеет вид
Уравнение (13) - устойчивое дифференциальное уравнение с возмущением Kε и при ε-->0 достигается цель адаптации (е-->0).
В изобретении [1] отмечается, что для выполнения условия ε-->0 требуется ∥Г∥→∞, но последнее согласно свойствам уравнения (6) приводит к увеличению скорости изменения оценок, возрастанию норм  и
и  что препятствует сходимости ошибки идентификации и может привести к возникновению высокочастотных резонансных явлений. Рабочие частоты объекта управления находятся, как правило, в низкочастотной области, рабочие же частоты алгоритма текущей идентификации (они определяются нормой матрицы Г) лежат выше рабочих частот объекта. Поэтому в изобретении [1] предлагается для устранения неблагоприятных резонансных явлений управление (5) пропускать через фильтр низких частот с частотой среза, меньшей, чем частота алгоритма идентификации, но превышающей диапазон рабочих частот ОУ.
что препятствует сходимости ошибки идентификации и может привести к возникновению высокочастотных резонансных явлений. Рабочие частоты объекта управления находятся, как правило, в низкочастотной области, рабочие же частоты алгоритма текущей идентификации (они определяются нормой матрицы Г) лежат выше рабочих частот объекта. Поэтому в изобретении [1] предлагается для устранения неблагоприятных резонансных явлений управление (5) пропускать через фильтр низких частот с частотой среза, меньшей, чем частота алгоритма идентификации, но превышающей диапазон рабочих частот ОУ.
Так как для справедливости в замкнутой системе выражения (12) является необходимым соблюдение условий (9) или (10), то в изобретении [1] предлагается внести в структурную схему адаптивной системы блок априорной информации о матрице эффективности управления объекта, который выдает в блок текущей идентификации информацию о матрице B0 с размерностью nхm. Эта матрица учитывает априорную информацию о матрице эффективности управления в виде соблюдения равенства [1]
rank(BT 0B)=rankB.
В блоке текущей идентификации матрица В0 используется для коррекции оценки матрицы  с целью, чтобы скорректированная оценка
с целью, чтобы скорректированная оценка  удовлетворяла условию (9).
удовлетворяла условию (9).
Таким образом, предложенная в изобретении [1] схема адаптивного управления с идентификатором и эталонной моделью позволяет упростить условия адаптируемости замкнутой системы.
Однако раскрытый в изобретении [1] подход содержит ряд недостатков. Проанализируем их.
Информация о векторе состояния х выдается датчиками информации, которые содержат постоянные и флуктуационные погрешности. Особенно трудно получить в этом случае информацию о производной вектора состояния  , которая необходима для работы идентификатора. Как правило, освоенные промышленностью датчики информации ее не измеряют, поэтому информацию с датчиков перед использованием в алгоритмах управления и идентификации фильтруют (сглаживают), после этого из сглаженных сигналов вычисляют производную
, которая необходима для работы идентификатора. Как правило, освоенные промышленностью датчики информации ее не измеряют, поэтому информацию с датчиков перед использованием в алгоритмах управления и идентификации фильтруют (сглаживают), после этого из сглаженных сигналов вычисляют производную  . В результате прохождения через фильтр появляется временная задержка информации о векторе состояния. К причинам, обуславливающим эту задержку, можно отнести:
. В результате прохождения через фильтр появляется временная задержка информации о векторе состояния. К причинам, обуславливающим эту задержку, можно отнести:
- фазовые сдвиги сигналов при фильтрации;
- конечное быстродействие вычислителей (при цифровой обработке информации).
Естественно, что в этом случае временные задержки будут иметь и выдаваемые идентификатором оценки  и
и  .
.
Рассмотрим, как повлияет наличие временных задержек информации на качество управления в предложенной в изобретении [1] схеме адаптивной системы.
Пусть информация о векторе состояния, измеренная датчиками и имеющая постоянные и флуктуационные ошибки, поступает в блок предварительной обработки информации (фильтр). После фильтрации в систему поступает зашумленная информация о векторе состояния и его производной (т.е. полностью отфильтровать шумы не удается, что имеет место на практике), а также точная информация о векторах управления и задающего воздействия. Производная вектора состояния либо непосредственно измеряется, либо вычисляется на основе сглаженных при предварительной фильтрации измерений вектора х. Таким образом, в алгоритмах идентификации и управления используются векторы хu и 
где Δx,ξx - n-мерные векторы постоянной и флуктуационных погрешностей определения вектора х;  - n-мерные векторы постоянной и флуктуационной погрешностей определения вектора
- n-мерные векторы постоянной и флуктуационной погрешностей определения вектора  . Шумы
. Шумы  и
и  малы. (Под малостью некоторой величины Δτ будет пониматься то, что она удовлетворяет свойству
малы. (Под малостью некоторой величины Δτ будет пониматься то, что она удовлетворяет свойству
|Δτ|≫|Δτ|k, k = 2,3...). (15)
Законы распределения шумов  и
и  и их статистические характеристики неизвестны.
и их статистические характеристики неизвестны.
В блоке текущей идентификации (ТИ) на основе информации о векторах xu,  и u вычисляются неизвестные оценки матриц
и u вычисляются неизвестные оценки матриц  и
и  . Информация об оценках
. Информация об оценках  , а также векторе состояния хu и его производной
, а также векторе состояния хu и его производной  поступает в систему управления с задержкой Δt, которая удовлетворяет условию (15).
поступает в систему управления с задержкой Δt, которая удовлетворяет условию (15).
Примем допущение, что у ОУ (1) следующие нормы векторов и матриц ограничены  что соответствуют большинству прикладных задач.
что соответствуют большинству прикладных задач.
В нашей постановке задачи вместо закона управления (5) используется следующее управление
Таким образом, необходимо определить, при каких условиях в замкнутой законом (16) системе будет обеспечиваться на всем промежутке времени работы системы близкая к нулю с точностью до погрешностей измерений норма  .
.
В начале рассмотрим динамику замкнутой системы при точном ЗУ (4) в случае временной задержки на малую величину Δt вектора состояния х.
ЗУ (4) принимает вид
u = B+[(Aм-A)x(t-Δt)+Bмuм-Df]. (17)
Вектор состояния x(t-Δt) в принятой постановке можно записать
Подставим управление (17) с учетом последнего выражения в уравнение объекта (1)
При выполнении условий (3) из последнего выражения следует
или
где Еn - единичная матрица размерностью (nхn).
Последнее выражение представим в виде
Полученное уравнение описывает динамику замкнутого управлением (17) объекта. Применяя лемму об обращении матриц [8] и отбрасывая слагаемые более высокого порядка малости, получаем
при  . С учетом этого уравнение (17) принимает вид
. С учетом этого уравнение (17) принимает вид
Введем "новую" ЭМ (эталонную модель)
где A
Вычитая из уравнения (18) уравнение модели (19) и группируя слагаемые, переходим к уравнению
где e*=x-x* м.
В общем случае нельзя определить, будет ли оператор А* м устойчивым. В случае асимптотической устойчивости свободного движения "новой" модели (19) управление (17) обеспечивает е*-->0 или х-->х* м. В случае неустойчивости свободного движения модели (19) из последнего уравнения следует,
что любые сколько угодно малые отклонения от начала координат вектора е* приводят в замкнутой системе к бесконечному по норме нарастанию данной ошибки, т.е. устойчивость замкнутой системы теряется.
Аналогичная ситуация будет наблюдаться и при использовании адаптивного ЗУ (16).
Таким образом, при временной задержке вектора состояния х на малую величину Δt в предлагаемой в изобретении [1] схеме адаптивного управления происходит ухудшение качества управления, которое можно представить как эффект "смены" эталонной модели (2) на "новую" модель (19). Замкнутая система отслеживает поведение "новой" модели, показатели качества которой могут существенно отличаться от заданных, т.е. не выполняет предъявляемых к ней требований. Как было указано выше, временные задержки информации появляются, прежде всего, из-за фильтрации измеренного сигнала х. Без фильтрации же данного сигнала обходится нельзя, если он зашумлен высокочастотными (по сравнению с рабочими частотами ОУ) шумами, что обычно имеет место на практике. Следовательно, при практической реализации изобретения [1] будут почти всегда иметь место задержки информации, а значит, ухудшаться качество адаптивного управления.
Задачей данного изобретения является устранение указанного недостатка.
Для достижения данной задачи предлагается в структурную схему системы внести блок предварительной обработки информации, в котором будет осуществляться сглаживание (фильтрация) измеренного вектора х и вычисление его производной, а также внести блок прогноза вектора состояния. Обоснуем необходимость предлагаемых изменений.
Необходимость использования блока предварительной обработки вектора состояния в случае, когда измеряемый вектор х зашумлен флуктуационными погрешностями, очевидна. Без сглаживания сигналов невозможно определить производную  , необходимую для работы текущей идентификации.
, необходимую для работы текущей идентификации.
Снижение эффекта "смены" модели, который особенно опасен возможностью потери устойчивости замкнутой системы, можно обеспечить использованием в ЗУ вместо вектора x(t-Δt) его приближенный прогноз на интервал времени Δt вперед, так как
Для этого в структурную схему адаптивной системы необходимо ввести блок прогноза вектора состояния, который будет формировать сигнал  . Причем прогноз вектора состояния в этом блоке на величину Δt вперед может обеспечиваться и по другим, более точным алгоритмам. Но в данной заявке для упрощения будем формировать прогноз вектора состояния в соответствии с выражением (20).
. Причем прогноз вектора состояния в этом блоке на величину Δt вперед может обеспечиваться и по другим, более точным алгоритмам. Но в данной заявке для упрощения будем формировать прогноз вектора состояния в соответствии с выражением (20).
Перейдем к адаптивному ЗУ (16), в который для снижения эффекта "смены" модели вследствие временной задержки вектора состояния также предлагается внести его приближенный прогноз на время задержки вперед, который обеспечивает блок прогноза вектора состояния
Исследуем, какими свойствами должны обладать выдаваемые идентификатором оценки параметров в этом случае, для обеспечения цели управления: норма  близка к нулю с точностью до погрешностей определения вектора состояния и его производной.
близка к нулю с точностью до погрешностей определения вектора состояния и его производной.
Для определения достаточных условий устойчивости замкнутой системы по ошибке адаптации и субоптимальности управления воспользуемся подходом, предложенным в работах [1], [5], [9], а также некоторыми результами этих работ.
Вычисляемая в АТИ ошибка идентификации с учетом (1), (14) может быть представлена в виде
Заметим, что в силу условий постановки задачи




Запишем ЗУ (21) с учетом выражений (22), (23) и выделим в квадратных скобках ошибку идентификации εu(t-Δt)
Слагаемые, выделенные фигурными скобками, составляют ошибку идентификации  , поэтому управление up с учетом выражений (24) - (26) можно записать в следующем виде
, поэтому управление up с учетом выражений (24) - (26) можно записать в следующем виде
Сумма слагаемых, выделенных фигурными скобками, согласно точному ЗУ (4) равна Вu*, слагаемое  выносится за скобку и в силу очевидного равенства [7]
выносится за скобку и в силу очевидного равенства [7]
Выражение для u приводится к виду
Для упрощения записи выражения (27) найдем приращение ошибки идентификации εu(t-Δt) на интервале Δt при условии, что оценки параметров постоянны: 
После приведения подобных слагаемых, учитывая выражения (24) - (26), получаем
Из выражения (27) с учетом (28) следует
Введем вектор возмущения ошибки адаптации Q
С учетом равенства (30) выражение (29) принимает вид уравнения, решения которого подробно рассмотрены в изобретении [1]
В соответствие с результатами изобретения [1] при выполнении хотя бы одного из следующих ранговых условий (см. выражения (9), (10))

решение уравнения (31) имеет вид
B(u-u*)=KQ, (34)
где матрица К имеет ограниченную норму (см. выше).
Уравнение (34) в соответствие с выражением (7) можно переписать в виде (35)
(35)
Таким образом, в замкнутой ЗУ (21) системе динамика ошибки адаптации при удовлетворении на всем промежутке времени работы системы оценки матрицы  условиям (32), (33) описывается устойчивым дифференциальным уравнением (35), в котором матрица К имеет ограниченную норму. Ограниченность нормы возмущения
условиям (32), (33) описывается устойчивым дифференциальным уравнением (35), в котором матрица К имеет ограниченную норму. Ограниченность нормы возмущения  приводит к ограниченности нормы
приводит к ограниченности нормы  (матрица Ам устойчивая), что позволяет сделать вывод о диссипативной устойчивости системы по ошибке адаптации при выполнении названных условий в рассматриваемой постановке. Причем из ∥Q∥→μ1⇒e→μ2 с течением времени, где μ1,μ2 - малые величины. От идентификатора требуется получение оценок, которые удовлетворяли бы условию
(матрица Ам устойчивая), что позволяет сделать вывод о диссипативной устойчивости системы по ошибке адаптации при выполнении названных условий в рассматриваемой постановке. Причем из ∥Q∥→μ1⇒e→μ2 с течением времени, где μ1,μ2 - малые величины. От идентификатора требуется получение оценок, которые удовлетворяли бы условию
В этом случае движение ОУ приближается к движению ЭМ с точностью до погрешностей измерения вектора состояния и его производной, в том смысле, что при стремлении данных погрешностей к нулю х-->xм. Физически требование (36) вполне очевидно: для хорошего качества управления выдаваемые идентификатором оценки должны хорошо прогнозировать движение на время задержки вперед.
Из изложенного следует ряд выводов:
1. Предлагаемое в изобретении [1] решение рассчитано на функционирование в идеальных условиях. На практике информация о векторе состояния и его производной искажена погрешностями, без уменьшения которых, как правило, невозможно обеспечить хорошее качество управления в замкнутой системе. Поэтому в структурную схему системы необходимо внести блок предварительной обработки информации, в котором будет происходить фильтрация информации о векторе состояния х и вычисление на основе сглаженных сигналов производной  . Фильтрация информации вызывает временные задержки вектора состояния и его производной. В случае временных задержек вектора состояния на малый интервал времени Δt замкнутая система перестает следить за назначенной ЭМ, а переходит на слежение за "новой" ЭМ. Причем показатели качества "новой" ЭМ могут существенно отличаться (на десятки процентов) от показателей качества назначенной ЭМ. Tакой эффект при задержках информации в системе управления (задержки почти всегда имеют место на практике) является серьезным недостатком предлагаемого в изобретении [1] решения.
. Фильтрация информации вызывает временные задержки вектора состояния и его производной. В случае временных задержек вектора состояния на малый интервал времени Δt замкнутая система перестает следить за назначенной ЭМ, а переходит на слежение за "новой" ЭМ. Причем показатели качества "новой" ЭМ могут существенно отличаться (на десятки процентов) от показателей качества назначенной ЭМ. Tакой эффект при задержках информации в системе управления (задержки почти всегда имеют место на практике) является серьезным недостатком предлагаемого в изобретении [1] решения.
2. Для устранения эффекта смены модели предлагается в законе управления использовать приблизительный прогноз вектора состояния на время задержки вперед. Для этого в структурную схему адаптивной системы предлагается внести блок прогноза вектора состояния.
Подробное описание устройства предлагаемой адаптивной системы и принципа ее действия приведено ниже.
Для подтверждения полученных выводов приводятся результаты численных исследований на примере управления продольным короткопериодическим движением гипотетического самолета.
Рассмотрим упрощенную модель продольного короткопериодического движения гипотетического самолета
где α - угол атаки; ωz - угловая скорость тангажа; δст,δпго - отклонение стабилизатора и переднего горизонтального управления соответственно; aj i, bj i - параметры математической модели. При моделировании значения параметров были приняты следующими:
a
amz a = 0.7-0.05t;
a
b
b
b
b
Пусть требуемые характеристики устойчивости и управляемости задает следующая эталонная модель
где uм - задающее воздействие.
Информация о α и ωz измеряется с погрешностями ξα и ξωz соответственно. Где ξα и ξωz высокочастотные центрированные нормально распределенные шумы с средними квадратичными отклонениями 0.2 град и 0.2 град/с соответственно.
Необходимо синтезировать управление δст,δпго, которое бы обеспечивало качественное слежение ОУ (37) за моделью (38) при неизвестных параметрах математической модели (37).
Неизвестные оценки параметров объекта управления вычисляются с помощью алгоритма текущей идентификации, в качестве которого используется рекуррентный метод наименьших квадратов с фактором забывания, равным 0,98 [10]. Для работы алгоритма текущей идентификации необходима информация о производных  и
и  (для вычисления ошибки идентификации). По условиям задачи производные
(для вычисления ошибки идентификации). По условиям задачи производные  и
и  не измеряются, а непосредственное их вычисление из измеряемых сигналов α и ωz не возможно, так как они содержат высокочастотные погрешности. Поэтому в блоке предварительной обработки измеренные сигналы сглаживаются на апериодическом звене с единичным коэффициентам усиления и постоянной времени 0,25 с. В алгоритмах управления и идентификации используются сглаженные сигналы
не измеряются, а непосредственное их вычисление из измеряемых сигналов α и ωz не возможно, так как они содержат высокочастотные погрешности. Поэтому в блоке предварительной обработки измеренные сигналы сглаживаются на апериодическом звене с единичным коэффициентам усиления и постоянной времени 0,25 с. В алгоритмах управления и идентификации используются сглаженные сигналы  и
и  , из них же вычисляются необходимые производные
, из них же вычисляются необходимые производные  и
и  . Однако при прохождении через апериодическое звено сигналы α и ωz получают фазовые сдвиги, которые в диапазоне рабочих частот объекта (до 1 Гц) можно приблизительно считать как временную задержку на Δt≈0,25с.
. Однако при прохождении через апериодическое звено сигналы α и ωz получают фазовые сдвиги, которые в диапазоне рабочих частот объекта (до 1 Гц) можно приблизительно считать как временную задержку на Δt≈0,25с.
Условие (33), выполнение которого необходимо для устойчивости системы по ошибке адаптации, в рассматриваемом примере приобретает вид
Заменим его на более жесткое
где значение границы 0,05 выбрано экспериментально исходя из устойчивости замкнутой системы (при малых значениях модуля этого определителя норма обратной матрицы  велика, что соответствует большому коэффициенту усиления в замкнутой системе и негативно сказывается на устойчивости).
велика, что соответствует большому коэффициенту усиления в замкнутой системе и негативно сказывается на устойчивости).
Таким образом, контроль за требуемыми ранговыми условиями сводится к контролю за выполнением условия (39).
При проведении численных исследований дифференциальные уравнения (37), (38) при нулевых начальных условиях решались методом Рунге-Кутта 4-го порядка с шагом 0,02с, с таким же шагом работали алгоритмы управления и идентификации. Задающее воздействие uм формировалось по алгоритму
Первоначально управление системы производилось по адаптивному закону (5) (т. е. блок прогноза вектора состояния отсутствует), в котором вектор xт = [α ωz] формировался на выходе апериодического звена. В сущности такой закон соответствует закону (16). Условие (39) выполнялось, ошибка идентификации на всем промежутке времени работы системы была близка к нулю. Процессы движения объекта (37) и модели (38) представлены на фиг.1. Как видно, движение объекта на переходных процессах не совпадает с заданным эталоном. Если сравнивать показатели качества, заданные эталонной моделью и полученные в замкнутой системе, то по углу атаки перерегулирования соответственно равны 0,2 и 0,3 (отличаются на 50%), а времена регулирования соответственно равны 2,7с и 7,6с (отличаются более чем на 180%). Основная причина низкого качества управления - не учет временной задержки вектора состояния в системе.
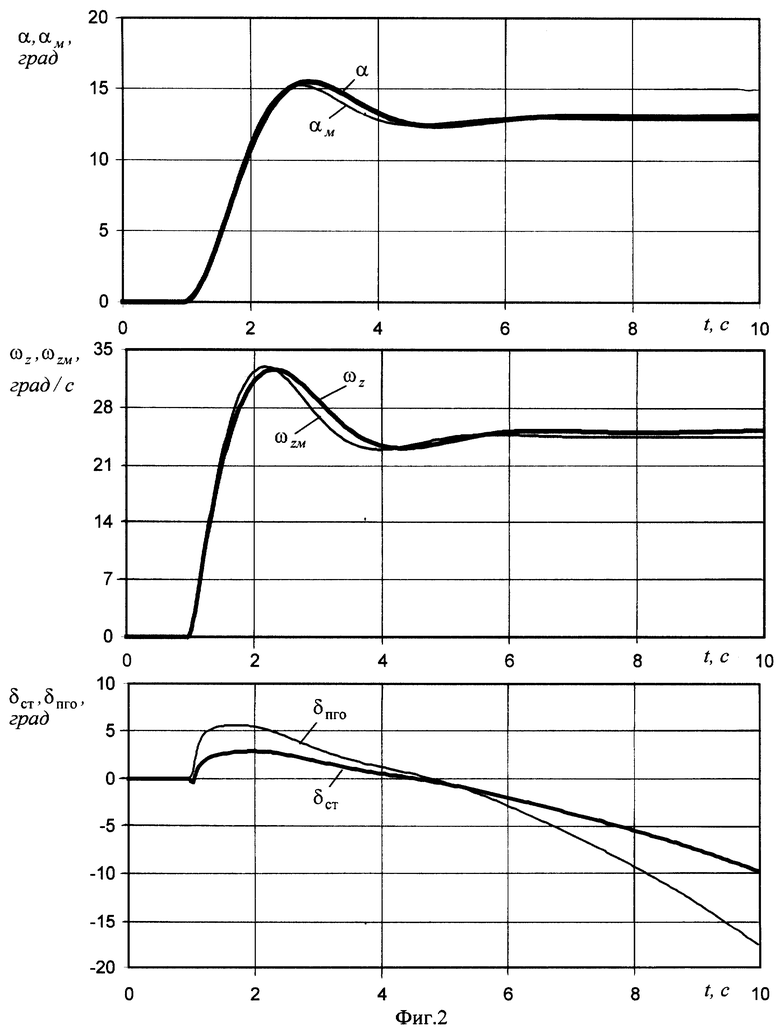
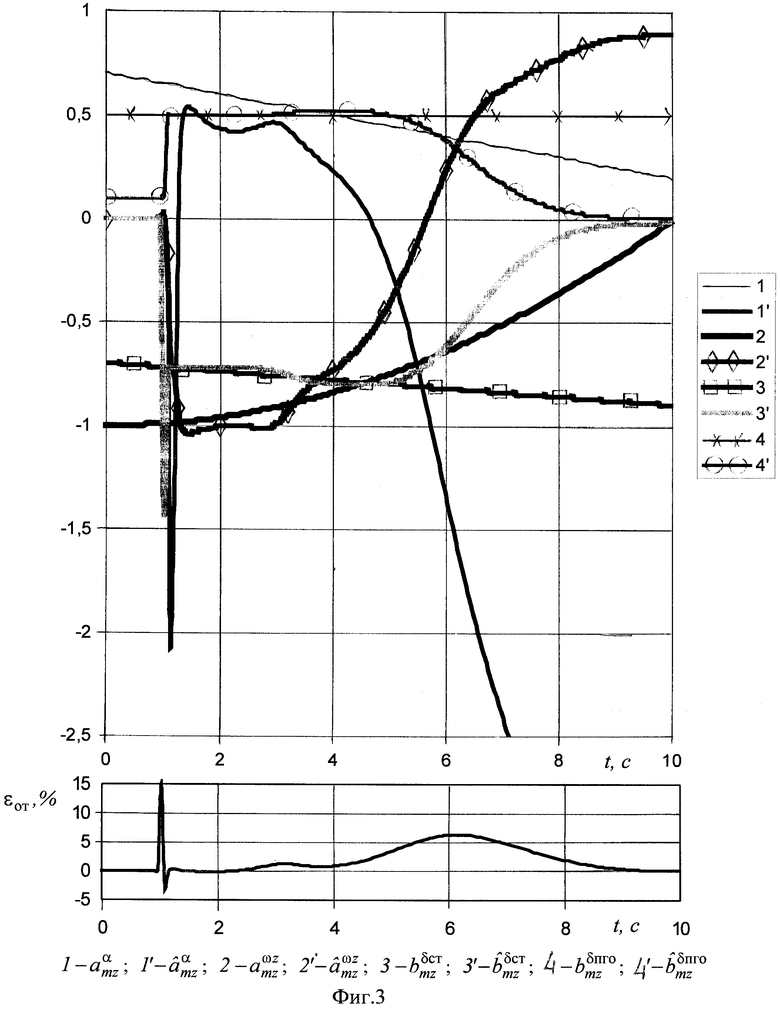
На фиг. 2 приведены результаты тех же исследований, но с использованием закона управления (21), т.е. с использованием блока прогноза вектора состояния. Прогнозирование значения вектора состояния на время задержки вперед осуществляется в соответствии с выражением (20), где Δt=0,25с. Как видно, введение блока прогноза существенно улучшило качество управления, - в этом случае движение объекта достаточно точно совпадает с эталонным. На фиг.3 для примера приведены изменения текущих оценок параметров объекта и точных значений параметров объекта для нижнего уравнения объекта (37). Как видно, оценки далеки от точных значений, однако цель управления в адаптивной системе достигается. Кроме этого на фиг.3 приведена относительная ошибка идентификации для этого же уравнения
где нижний индекс [u] обозначает измеренные сигналы (т.е. зашумленные), прошедшие через блок предварительной обработки (апериодическое звено);  - максимальное значение отклика на рассматриваемом промежутке времени. Как видно, алгоритм текущей идентификации обеспечивает ошибку идентификации, близкую к нулю.
- максимальное значение отклика на рассматриваемом промежутке времени. Как видно, алгоритм текущей идентификации обеспечивает ошибку идентификации, близкую к нулю.
Приведенные численные исследования подтверждают справедливость теоретических выводов.
Таким образом, предложенная схема адаптивного управления с идентификатором и эталонной моделью позволяет обеспечить заданные (в форме эталонной модели) показатели качества управления в условиях действия ошибок измерения и временных задержках информации в системе управления. Это способствует практическому внедрению адаптивных систем, а также позволяет расширить область их использования.
На фиг.1 представлено движение объекта управления при использовании закона управления без учета прогноза вектора состояния.
На фиг.2 представлено движение объекта управления при использовании закона управления с учетом прогноза вектора состояния.
На фиг.3 приведены зависимости изменения оценок параметров объекта управления, их точных значений и относительной ошибки идентификации.
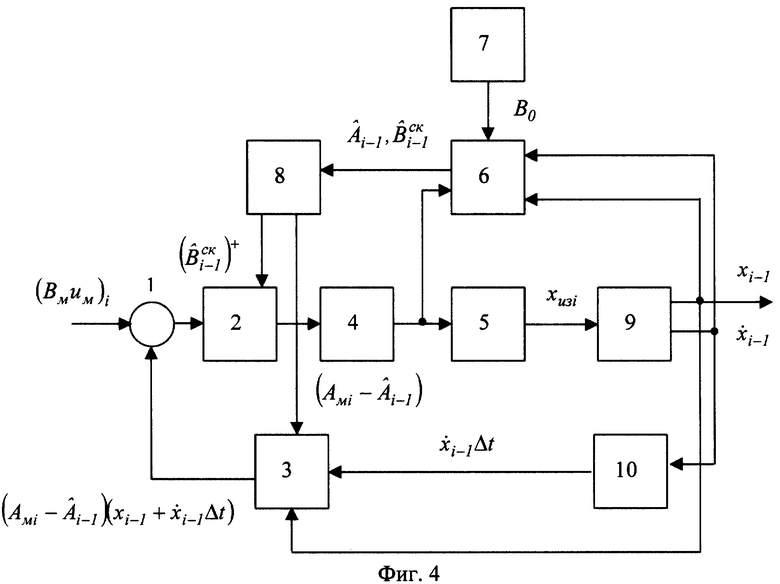
На фиг.4 представлена структурная схема адаптивной системы управления с идентификатором и неявной эталонной моделью при временных задержках информации в системе управления.
Структурная схема содержит сумматор 1, первый 2 и второй 3 регуляторы, фильтр 4 низких частот, объект 5 управления, блок 6 текущей идентификации, блок 7 априорной информации о матрице эффективности управления объекта, блок 8 настройки регуляторов, блок 9 предварительной обработки информации, блок 10 прогноза вектора состояния.
Адаптивная система работает следующим образом. Задающее воздействие в виде [Bмuм] i подается на первый вход сумматора 1. На второй вход сумматора поступает сигнал с выхода второго регулятора 3. Выход сумматора связан с первым входом первого регулятора 2, этот регулятор окончательно формирует управление в соответствии с зависимостью
Момент времени [i-1] отличается от момента [i] на величину задержки Δt. Выход первого регулятора связан с входом фильтра 4 низких частот, пропускающего рабочую частоту ОУ. Выход фильтра связан с входом объекта 5 управления и с первым входом блока 6 текущей идентификации. С выхода объекта управления снимается информация о измеренном значении вектора состояния хuзi, которая содержит постоянные и флуктуационные погрешности, и подается на вход блока 9 предварительной обработки информации, который осуществляет фильтрацию выходного сигнала хuзi, отсекая его высокочастотные составляющие, и формирует сигналы хi-1 и  . В результате обработки информации появляется задержка на величину Δt. Первый выход блока 9 предварительной обработки информации связан с третьим входом блока 6 текущей идентификации и со вторым входом второго регулятора 3, а второй выход - с четвертым входом блока 6 текущей идентификации и с входом блока 10 прогноза вектора состояния. Блок 10 прогноза вектора состояния осуществляет прогноз вектора состояния на время задержки Δt, выход которого связан с первым входом второго регулятора 3, который преобразует входные сигналы хi-1 и
. В результате обработки информации появляется задержка на величину Δt. Первый выход блока 9 предварительной обработки информации связан с третьим входом блока 6 текущей идентификации и со вторым входом второго регулятора 3, а второй выход - с четвертым входом блока 6 текущей идентификации и с входом блока 10 прогноза вектора состояния. Блок 10 прогноза вектора состояния осуществляет прогноз вектора состояния на время задержки Δt, выход которого связан с первым входом второго регулятора 3, который преобразует входные сигналы хi-1 и  в виде
в виде  . Выход блока 7 априорной информации о матрице эффективности управления объекта подключен ко второму входу блока текущей идентификации. Блок текущей идентификации по входным сигналам с блока предварительной обработки информации: xi-1,
. Выход блока 7 априорной информации о матрице эффективности управления объекта подключен ко второму входу блока текущей идентификации. Блок текущей идентификации по входным сигналам с блока предварительной обработки информации: xi-1,  - формирует текущие оценки параметров ОУ:
- формирует текущие оценки параметров ОУ:  . Вектор
. Вектор  может либо непосредственно измеряться, либо аналитически вычисляться в блоке предварительной обработки информации по сглаженной информации о векторе состояния хi-1, например, на основе полиномиальной или тригонометрической аппроксимации на скользящем интервале [11] . Алгоритм текущей идентификации блока 6 относится к классу алгоритмов типа стохастической аппроксимации, в качестве которого можно использовать алгоритм, описанный в работе [10]
может либо непосредственно измеряться, либо аналитически вычисляться в блоке предварительной обработки информации по сглаженной информации о векторе состояния хi-1, например, на основе полиномиальной или тригонометрической аппроксимации на скользящем интервале [11] . Алгоритм текущей идентификации блока 6 относится к классу алгоритмов типа стохастической аппроксимации, в качестве которого можно использовать алгоритм, описанный в работе [10]
Для выполнения требований (32) или (33) на каждом шаге идентификации в блоке 6 производится коррекция оценки  . Выход блока текущей идентификации, через который выдаются оценки
. Выход блока текущей идентификации, через который выдаются оценки  и
и  , связан с блоком 8 настройки регуляторов. Этот блок вычисляет
, связан с блоком 8 настройки регуляторов. Этот блок вычисляет  и
и  . Для реализации псевдообращения матриц можно использовать метод Гривилля [7]. Первый выход блока 8 связан со вторым входом первого регулятора, по нему передается информация о
. Для реализации псевдообращения матриц можно использовать метод Гривилля [7]. Первый выход блока 8 связан со вторым входом первого регулятора, по нему передается информация о  . Второй выход блока 8 связан с первым входом второго регулятора, по нему передается информация о матрице
. Второй выход блока 8 связан с первым входом второго регулятора, по нему передается информация о матрице  .
.
ЛИТЕРАТУРА
1. Буков В. Н., Круглов С.П. Адаптивная система управления с идентификатором и неявной эталонной моделью. - Патент 2108612 от 14.09.94 г. (прототип).
2. Уткин В.Н. Скользящие режимы в задачах оптимизации и управления. - М. : Наука, 1981.
3. Справочник по теории автоматического управления / Под ред. А.А. Красовского. - М.: Наука, Гл. ред. физ. мат. лит., 1987.
4. Изерман Р. Цифровые системы управления: Пер. с англ. - М.: Мир, 1984.
5. Буков В.Н., Круглов С.П., Решетняк Е.П. Адаптируемость линейной динамической системы с идентификатором и эталонной моделью // Автоматика и телемеханика, 1994. - 3, С. 99...107.
6. Цыпкин Я.З. Основы информационной теории идентификации. - М.: Наука, Гл. ред. физ.-мат. лит., 1984.
7. Гантмахер Ф.Р. Теория матриц. - М.: Наука, Гл. ред. физ. мат. лит., 1988.
8. Хорн Р., Джонсон Ч. Матричный анализ: Пер. с англ. - М.: Мир, 1989.
9. Бронников А.М. Исследование устойчивости адаптивной системы управления с идентификатором и эталонной моделью при временных задержках в системе управления. - Деп. в Центральном справочно-информационном фонде МО РФ 8.09.97.
10. Гроп Д. Методы идентификации систем: Пер. с англ. - М.: Мир, 1979.
11. Пашковский И.М., Леонов В.А., Поплавский Б.К. Летные испытания самолетов и обработка результатов испытаний. - М.: Машиностроение, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2004 |
|
RU2258951C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2002 |
|
RU2231819C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| СИСТЕМА НЕПРЯМОГО АДАПТИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2381539C2 |
| Система последовательного финитного управления конечным состоянием линейных стационарных динамических объектов | 1987 |
|
SU1467534A1 |
| Система идентификации колебаний присоединенного к объекту упругого элемента переменной жесткости | 1986 |
|
SU1432457A1 |
| Способ адаптивного управления мостовым краном | 2024 |
|
RU2830910C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| Способ адаптивного управления мостовым краном | 2020 |
|
RU2744647C1 |
Изобретение относится к системам автоматического управления динамическими объектами широкого класса с неизвестными переменными параметрами и неконтролируемыми возмущениями. Техническим результатом изобретения является обеспечение задаваемого (с помощью эталонной модели) качества управления в замкнутой системе при временных задержках вектора состояния и выдаваемых идентификатором оценок параметров математической модели, что расширяет возможности применения адаптивной системы на практике. Временные задержки в системе вызваны конечным быстродействием вычислителя и работой фильтров, компенсирующих погрешности измерений информации. Система содержит сумматор, первый и второй регуляторы, фильтр низких частот, объект управления, блок текущей идентификации, блок априорной информации о матрице эффективности управления объекта, блок настройки регуляторов, блок предварительной обработки информации, блок прогноза вектора состояния. 4 ил.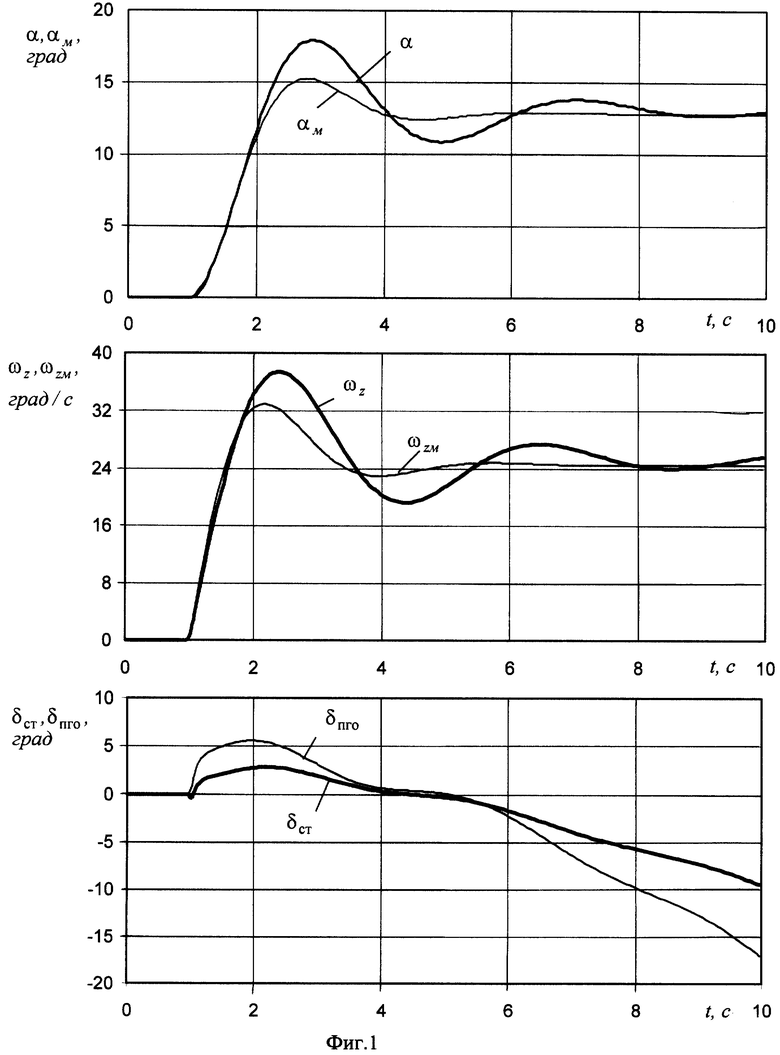
Адаптивная система управления с идентификатором и неявной эталонной моделью при временных задержках информации в системе управления, содержащая сумматор, первый вход которого подключен к задающему воздействию, а выход - к первому входу первого регулятора, выход которого подключен к входу фильтра низких частот, выход которого подключен к входу объекта управления и первому входу блока текущей идентификации, блок априорной информации о матрице эффективности управления, выход которого подключен ко второму входу блока текущей идентификации, выход блока текущей идентификации подключен к входу блока настройки регуляторов, первый выход которого подключен ко второму входу первого регулятора, а второй выход - к первому входу второго регулятора, выход которого подключен ко второму входу сумматора, отличающаяся тем, что она дополнительно содержит блок предварительной обработки информации, вход которого подключен к выходу объекта управления, а первый выход - к третьему входу блока текущей идентификации и второму входу второго регулятора, второй выход блока предварительной обработки информации подключен к четвертому входу блока текущей идентификации, блок прогноза вектора состояния, вход которого подключен ко второму выходу блока предварительной обработки информации, а выход подключен к третьему входу второго регулятора.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| RU 96120056 А, 10.01.1999 | |||
| US 4407013 А, 27.09.1983 | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Справочник по теории автоматического управления./Под ред | |||
| Красовского А.А., М.: Наука, 1987, с | |||
| Катодный усилитель | 1923 |
|
SU492A1 |
