Изобретение относится к области радиотехники, а более конкретно к способам определения местоположения пользователя устройства мобильной связи (абонента).
На сегодняшний день можно назвать множество приложений, которые требуют разработки надежных и высокоточных методов определения местоположения абонентов мобильной связи, в частности, внутри помещений. Это задачи по обнаружению и определению координат источников экстренных вызовов медицинской или технической помощи в больших промышленных зонах, мониторинг расположения медицинского персонала в лечебных учреждениях или работников в офисах, управление потоками транспорта на больших погрузочно-разгрузочных терминалах. Кроме того, решение этой задачи открывает возможность использовать системы локации для создания электронных гидов в больших помещениях музеев, выставочных комплексах и супермаркетах.
Среди известных решений наиболее развитыми можно считать спутниковые навигационные системы, основанные на технологии GPS. Однако они являются малоэффективными в задачах определения местоположения абонентов внутри помещений, поскольку в таких условиях, как правило, нет возможности принимать достаточное для решения навигационной задачи число спутниковых сигналов. Поэтому наиболее перспективными являются системы малого радиуса действия, в которых как источники, так и приемники навигационных сигналов находятся в пределах области обслуживания навигационной системы.
К таким системам относится решение, изложенное, например, в патенте США No 5977913 [1]. Описанная в [1] методика оценки координат абонента основана на измерении несколькими приемниками, расположенными в известных точках, уровней сигнала тревоги, который передается оборудованием абонента.
В патенте США No 6323787 [2] решение о местонахождении абонента выносится на основе результатов измерений сразу нескольких физических величин, таких как мощность светового потока, изменение температуры, вектор напряженности магнитного поля, ускорение. Эти измерения производятся пассивными сенсорами, расположенными на оборудовании абонента.
В патентах США No 6084547 [3] и No 4799062 [4] рассмотрены системы, в которых оборудование абонента является источником радиосигнала, а решение навигационной задачи осуществляется на основе измерений задержек этого сигнала методами TDOA (Time Difference of Arrival) или RTOA (Reference Time of Arrival).
Одной из основных проблем, которая ограничивает возможности таких навигационных систем является эффект непрямого и многолучевого распространения электромагнитных волн. При этом на приемной стороне наблюдается сложный сигнал, который представляет собой сумму копий передаваемого сигнала с различными и неизвестными задержками амплитудами и фазами. Это зачастую не позволяет достоверно определять необходимые для локации параметры (например, время прихода раннего луча и его уровень). Известные радиофизические методы, направленные на повышение точности оценки параметров за счет повышения отношения сигнал/шум в таких условиях, не решают данной проблемы.
Таким образом, для создания высокоточных и надежных систем локации недостаточно использовать только результаты измерений параметров навигационного сигнала, а необходимо привлекать дополнительную информацию.
Так, в [1] используются полученные заранее измерения уровней принимаемого сигнала при нахождении абонента в точках с известными координатами. В качестве оценки местоположения выбирается та точка, с которой наблюдается наибольшее согласование в измерениях мощностей. Здесь же указано, что в качестве дополнительной или априорной информации можно использовать модель распространения сигнала. Однако в предложенном решении не указано, как именно сформировать адекватную модель распространения для конкретного помещения, что является непростой задачей.
В системе, предложенной в [3], используется RTOA подход, а для повышения точности локации предлагается использовать калибровочную таблицу, содержащую значения корректировок оценки координат или измерений задержек сигналов для большого числа точек. Предложенный способ не объясняет, каким образом может быть использована априорная информация о вероятности нахождения абонента в какой-либо точке или о границах области возможного его расположения.
Большинство известных алгоритмов оценки координат базируются на методе наименьших квадратов. Таким является, например, наиболее близкое к предлагаемому техническое решение, описанное в [4]. В нем сформулирован алгоритм, который дает оптимальное решение (при наличии только гауссовских ошибок) при условии, что любое местоположение абонента является возможным, однако этот алгоритм не позволяет получить оптимальное решение в среднем для заданной области возможного местоположения абонента.
Таким образом, анализируя недостатки известных решений, можно сделать вывод о том, что до сих пор не предложены методы оптимального (по заранее выбранному критерию) использования априорных данных о границах областей возможного расположения абонентов, а также информации о вероятности расположения абонентов в различных точках этой области. Также в известных источниках нет примера использования дополнительной информации для создания алгоритма, обеспечивающего оптимальное, по какому-либо критерию, решение для заданной области возможного расположения абонента. Устранение этих недостатков позволило бы обеспечить повышение точности определения местоположения абонентов внутри помещений, например, за счет применения метода наиболее полного использования априорной информации о возможном расположении абонента и вероятности его нахождения в различных областях в пределах области обслуживания навигационной системы.
Для достижения такого технического результата предлагается формирование на основе априорной информации такого алгоритма оценки, который обеспечивал бы оптимальное решение в среднем для всей области обслуживания навигационной системы.
Максимальная простота и дешевизна оборудования абонента зачастую является определяющим фактором при разработке рассматриваемых навигационных систем. Поэтому наиболее предпочтительными в этом плане являются системы, в которых источником навигационного сигнала является оборудование абонента. В этом случае нет необходимости организовывать каналы передачи данных между оборудованием абонента и центром, осуществляющим мониторинг за его расположением.
С учетом этих соображений предлагаемое техническое решение было направлено на создание такой системы, в которой определение местоположения абонента осуществляется на основе измерений задержек и уровней сигнала пользователя несколькими базовыми станциями.
Основной отличительный признак предложенного решения заключен в способе использования Байесовского подхода для решения поставленных задач по повышению точности определения местоположения. Как известно, такой подход позволяет наиболее полно учитывать априорные данные относительно возможных значений оцениваемых параметров и позволяет синтезировать алгоритмы оценки, дающие эффективные решения.
Так, при оценке местоположения абонента внутри помещения в качестве априорной информации предлагается выбирать следующее:
- границы помещения, в пределах которого может находиться абонент,
- вероятность нахождения абонента в конкретной точке помещения,
- функцию распределения значений навигационных параметров в различных точках внутри помещения.
Предположим, что доступны измерения относительных задержек pri и уровней сигнала рi, излучаемого оборудованием пользователя, полученные на NBS различных базовых станциях.
Как известно, в соответствии с Байесовским правилом оценка координат пользователя  и неизвестного временного рассогласования
и неизвестного временного рассогласования  (в рамках RTOA подхода) определяется как положение абсолютного минимума апостериорного риска:
(в рамках RTOA подхода) определяется как положение абсолютного минимума апостериорного риска:
 , где
, где

Здесь  - функция потерь Wpr(x,y,z,τ) - априорное распределение неизвестных параметров,
- функция потерь Wpr(x,y,z,τ) - априорное распределение неизвестных параметров,  - функция правдоподобия наблюдаемых данных.
- функция правдоподобия наблюдаемых данных.
Существо изобретения поясняется чертежами.
На Фиг.1 представлена схема рассматриваемой системы, где:
1 - границы помещения;
2 - базовые станции, которые измеряют относительные задержки и уровни сигнала, излучаемого оборудованием мобильного абонента;
3 - оборудование мобильного абонента;
4 - сервер, осуществляющий решение навигационной задачи.
Оборудование абонента излучает сигнал с прямым расширением спектра. Сигнал каждого абонента промодулирован индивидуальной m-последовательностью, что позволяет проводить идентификацию абонентов.
Системные часы базовых станций синхронизированы с высокой точностью, что позволяет использовать измерения относительных задержек принимаемого от абонента сигнала для решения навигационной задачи методами RTOA или TDOA.
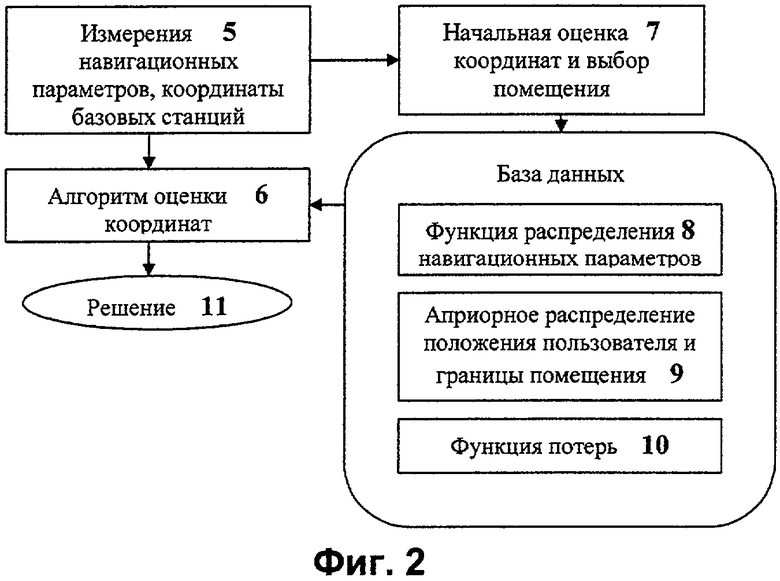
На Фиг.2 представлена обобщенная блок-схема алгоритма локации.
Процедура оценки координат состоит из следующих этапов.
Осуществляют прием сигнала абонента базовыми станциями и оценку навигационных параметров. Такими параметрами являются, в частности, относительные задержки сигнала абонента или оценка его уровня.
На основе измерений навигационных параметров осуществляют первоначальную оценку местоположения абонента. Эта процедура необходима для выбора помещения или области, в пределах которой находится абонент. Эту задачу решают, например, при помощи метода наименьших квадратов, применительно к задержкам сигналов.
Из заранее сформированной базы данных выбирают функцию распределения навигационных параметров, априорное распределение положения абонента, а также границы помещения, в котором находится абонент, кроме того, выбирают функцию потерь. Формирование указанной базы данных требует обучения системы. Для описания функции распределения навигационных параметров, а также функции априорного распределения положения абонента используют модель или результаты множества заранее проведенных тестов. Проведение большого числа тестов может оказаться неприемлемым. В этом случае в качестве априорных данных выбирают следующие: распределение пользователя считать равномерным внутри помещения; распределение ошибок измерения задержек считать гауссовским. Функцию потерь выбирают квадратичной
 .
.
Полученные измерения навигационных параметров и априорная информация из базы данных вносят в алгоритм определения координат. Рассмотрим для примера вариант алгоритма в наиболее простом случае, когда имеются измерения только относительных задержек сигнала, а априорная информация содержит только данные о границах помещения, где может находиться пользователь. Пусть выбрана квадратичная функция потерь. Минимизация апостериорного риска приводит к следующему правилу оценки координат в режиме трехмерной локации:
Здесь D - область в пределах границы помещения, Т - априорный интервал возможных значений τ. Если нет информации об распределении навигационных параметров, то можно ограничиться гауссовской моделью ошибок измерения задержки. Кроме того, в большинстве практических приложений область Т достаточно велика, так, что пределы интегрирования по τ можно заменить на бесконечные и проинтегрировать аналитически. В этом случае оценки координат будут иметь вид:
где
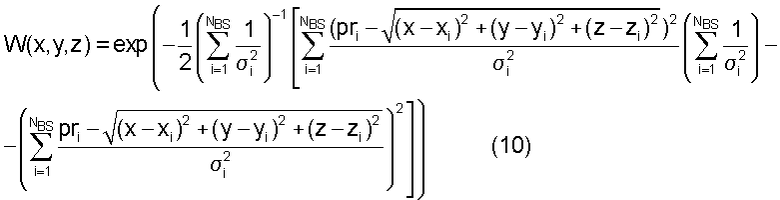
Здесь хi, yi, zi - координаты i-й базовой станции, σi 2 - дисперсия i-го измерения.
В практических приложениях используют различные методы численного интегрирования, такие как метод Гаусса, Ньютона-Котеса и др.
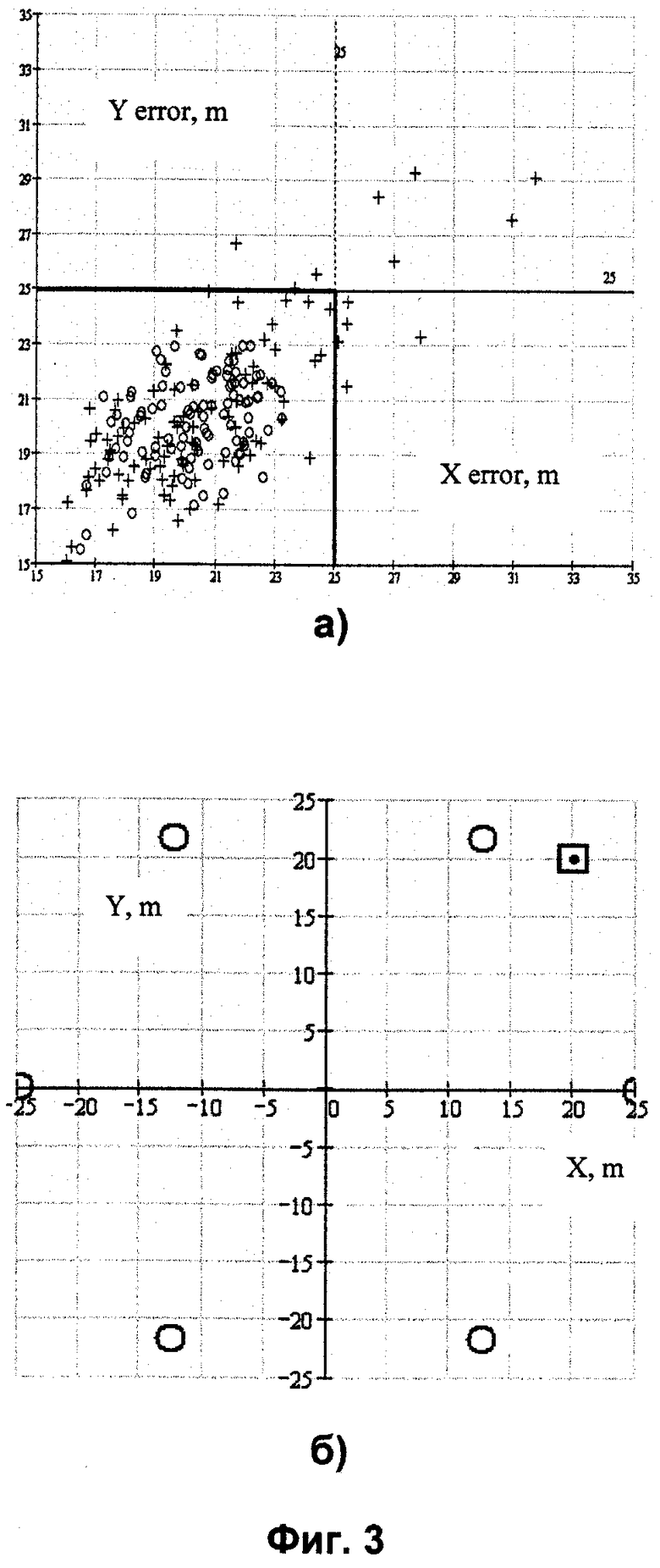
Для иллюстрации эффективности предложенного решения на Фиг.3 приведены результаты моделирования описанного алгоритма. На Фиг.3а кружками обозначено расположение базовых станций, квадратом обозначено расположение абонента. Помещение имеет квадратную форму размера 25×25 метров. Ошибки измерения задержки моделировались по методу Гаусса с нулевым математическим ожиданием и среднеквадратическим отклонением, равным 2 метрам. На Фиг.3б жирными линиями обозначены границы помещения. Здесь же кружками обозначены результаты работы предложенного алгоритма, а крестами результаты работы стандартного алгоритма, основанного на методе наименьших квадратов. Для метода наименьших квадратов значение ошибки определения местоположения в 67% случаев меньше 3.5 м, а в 95% случаев меньше 10.6 м. Предложенный алгоритм показал более высокую точность: в 67% случаев ошибка не превысила 2.5 м, а в 95% случаев - 3.6 м.
Таким образом, приведенные результаты моделирования показывают, что предложенный способ использования априорной информации существенно повышает точность и надежность оценки определения местоположения абонента внутри помещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система определения местоположения объекта внутри помещения | 2017 |
|
RU2679727C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОЙ МОБИЛЬНОЙ СТАНЦИИ, УСТАНОВЛЕННОЙ НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2004 |
|
RU2272356C1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2278394C2 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОГО АБОНЕНТА | 2000 |
|
RU2183021C1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ МНОГОЛУЧЕВЫХ ОШИБОК ИЗМЕРЕНИЙ ПСЕВДОРАССТОЯНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНОЙ СТАНЦИИ | 2004 |
|
RU2267796C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ВЫСОКОТОЧНОГО ОДНОЭТАПНОГО ПЕЛЕНГАТОРА И АДРЕСНО-ОТВЕТНОЙ ПАКЕТНОЙ ЦИФРОВОЙ РАДИОЛИНИИ В ДКМВ ДИАПАЗОНЕ | 2016 |
|
RU2613369C1 |
| Способ навигации и позиционирования объектов внутри помещений на основе системы определения местоположения в реальном времени | 2023 |
|
RU2811366C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| СПОСОБ СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ О ТРАНСПОРТНЫХ ПОТОКАХ НА АВТОДОРОГАХ С ИСПОЛЬЗОВАНИЕМ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ДАННЫХ | 2010 |
|
RU2442963C1 |
Изобретение относится к радиотехнике и предназначено для определения местоположения пользователя устройства мобильной связи. Технический результат состоит в повышении точности определения местоположения абонентов внутри помещений за счет дополнительного использования априорной информации о возможном расположении абонента и вероятности его нахождения в различных областях в пределах области обслуживания навигационной системы. Для этого предлагается формирование на основе априорной информации такого алгоритма оценки, который обеспечивал бы оптимальное решение в среднем для всей области обслуживания навигационной системы, при этом источником навигационного сигнала является оборудование абонента. Местоположение абонента осуществляется на основе измерений задержек и уровней сигнала пользователя несколькими базовыми станциями. 7 з.п. ф-лы, 3 ил.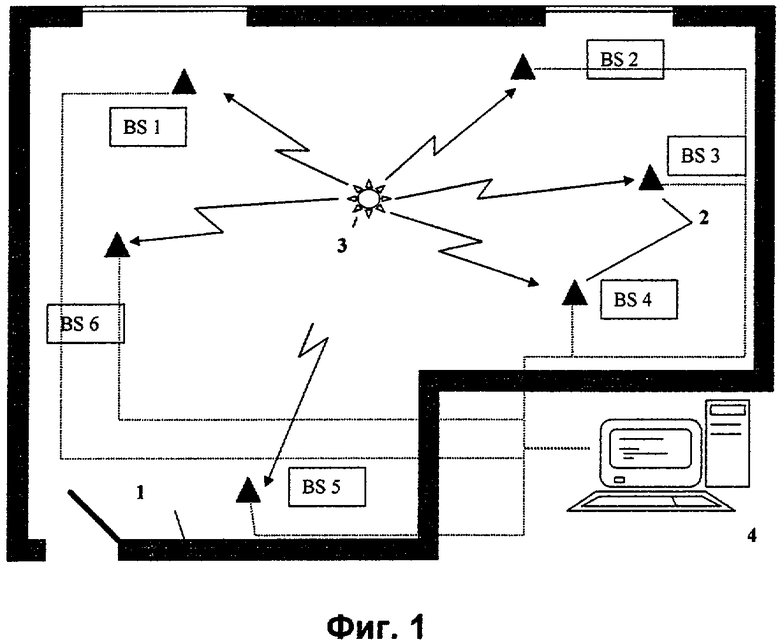
| US 5977913 А, 02.11.1999 | |||
| ЧЕТЫРЕХТОЧЕЧНЫЙ СПОСОБ ЭЛЕКТРОРАЗВЕДКИ | 1993 |
|
RU2105327C1 |
| US 6323787 B, 27.11.2001 | |||
| US 6084547 В, 04.07.1998. | |||

