Изобретение относится к радиолокации, в частности к имитаторам отраженного сигнала радиолокационной станции с синтезированием апертуры (РСА), работающей по наземным и морским целям, и может быть использовано для полунатурных испытаний РСА, в том числе для исследования процессов обнаружения и слежения за объектами на фоне протяженной поверхности.
Известен имитатор цели РСА [1], где за время синтеза апертуры с высокой точностью имитируется как доплеровский сдвиг, так и изменение дальности до одиночной подвижной цели, при этом изменение дальности за время синтеза апертуры может быть существенным по сравнению с размером элемента разрешения. Принятый сигнал РЛС через смеситель с помощью первого гетеродинного сигнала переносится на видео частоту, проходит низкочастотный (НЧ) фильтр, оцифровывается и записывается в память. Адрес записи меняется с тактом выборки сигнала. Такт выборки сигнала формируется путем деления частоты первого гетеродина в N раз. Считывание записанного сигнала производится с задержкой, соответствующей имитируемой дальности цели, оцифрованный сигнал преобразуется в аналоговую форму, фильтруется в НЧ фильтре, переносится на несущую и излучается в сторону РСА. Особенностью воспроизведения сигнала цели является то, что частота второго гетеродина отличается от частоты первого гетеродина на имитируемую текущую доплеровскую частоту сигнала цели (радиальную скорость цели). При этом синтезатор второй гетеродинной частоты, управляется контроллером и обеспечивает расчетное изменение частоты во времени. Для обеспечения когерентности имитируемого сигнала синтезатор второй гетеродинной частоты синхронизируется частотой первого гетеродина. Такт считывания записанного сигнала формируется путем деления частоты второго гетеродина в N раз. Адрес считывания формируется счетчиком импульсов такта считывания. Начальное значение адреса соответствует задержке имитируемого сигнала цели.
Достоинством устройства является возможность работы имитатора с произвольным сигналом РЛС, который может изменяться от импульса к импульсу, как по модуляции, так и по периоду повторения.
Недостатком имитатора является то, что он не имитирует сигнал протяженной (по дальности и доплеровскому сдвигу) цели, сигнал фона и флюктуацию разрешаемых сигналов по времени.
Известен имитатор сигнала сцены [2], используемый при проверках радиолокационной станции (РЛС) на промежуточной частоте (ПЧ) или на несущей с заранее известной модуляцией без включения передатчика. Метод имитации сигнала сцены включает: 1) получение спектров сигнала модуляции РЛС и импульсных характеристик сцены при разных доплеровских сдвигах частоты, 2) перемножение спектров (свертку импульсной характеристики сигнала сцены и модуляции сигнала в частотной области), 3) преобразование с помощью обратного преобразования Фурье результатов свертки во временную область, 4) запись полученного сигнала сцены на видео частоте, 5) использование оцифрованных квадратур временного сигнала на видео частоте для получения соответствующего сигнала на ПЧ с соответствующим доплеровским сдвигом, 6) суммирование сигналов на ПЧ с имитируемыми сигналами помех, введение в сигнал эффектов, связанных с погодой и т.п., 7) перенос суммарного сигнала с ПЧ на несущую частоту.
Достоинством имитатора является возможность имитации сигнала сцены в широком диапазоне дальностей и доплеровских частот с учетом положения и диаграммы направленности антенны.
Недостатком имитатора является формирование имитируемого сигнала не по реальному сигналу передатчика, а по его виртуальному спектру и периоду повторения.
Известно устройство тестирования РЛС [3] в наземных условиях, где антенна РЛС с инерциальной навигационной системой (ИНС) установлена неподвижно. Цель имитируется задержкой сигнала, принятого имитатором на подвижной платформе, и движением платформы. При этом изменяется во времени и дальность, и доплеровская частота сигнала цели. Задержанный сигнал излучается в сторону РЛС. Процессором программно управляется движение платформы имитатора относительно РЛС. Для задержки имитируемого сигнала используется оптическая линия задержки. В процессе обработки имитированного сигнала цели в РЛС участвуют текущие данные ИНС и спутниковой навигационной системы GPS.
Достоинством устройства является высокая точность имитации сигнала одиночной цели на интервале синтеза апертуры.
Недостатком устройства тестирования является невозможность имитации протяженной по дальности и доплеровской частоте цели и фона, на котором она наблюдается.
Известно устройство имитации сигнала импульсно доплеровской РЛС при работе по протяженной цели с использованием сложного сигнала [4], принятое в качестве прототипа. При этом перед работой в память имитатора вводят исходную импульсную характеристику сцены в комплексном виде в координатах дальность - доплер - угловое положение антенны РЛС, оцифрованную на видео частоте модуляцию сигнала РЛС (данный сигнал используется при имитации сцены, в которой все разрешаемые по дальности элементы имеют нулевую доплеровскую частоту), значение доплеровской частоты (одно из восьми) для каждого разрешаемого по дальности элемента импульсной характеристики сцены (используется для имитации работы РЛС с простым сигналом), значения промежуточной частоты и гетеродинных частот, с помощью которых имитируемый на видео частоте сигнал сцены переносится на несущую частоту, эталонная частота, синхронизирующая формирование промежуточной и гетеродинных частот (обеспечивает получение когерентных сигналов сцены и формирование внутренних синхронизирующих сигналов имитатора), код текущего положения антенны РЛС (используется совместно с кодом дальности для формирования адреса считывания текущего значения импульсной характеристики сцены, записанной в память), импульсы периода повторения. Каждый из четырех импульсов повторения запускает свой счетчик дальности, код каждого счетчика дальности является адресом считывания ранее записанной исходной импульсной характеристики сцены в виде амплитуд и доплеровских частот сигналов элементов сцены. Амплитуда каждого элемента сцены, считанного по дальности в текущий период повторения, квадратурно модулируется соответствующей доплеровской частотой, полученные развертки комплексных сигналов элементов сцены складываются (обеспечивается имитация огибающей сигнала сцены при длине импульсной характеристики сцены, большей периода повторения) и поступают на два аналогичных фильтра с конечной импульсной характеристикой (КИХ фильтры), выходы которых являются квадратурами имитируемого сигнала сцены на видео частоте. Импульсная характеристика первого КИХ фильтра соответствует реальной части записанной в память модуляции зондирующего сигнала, для второго - мнимой части того же сигнала. Квадратурные составляющие сигнала с выходов КИХ фильтров (оцифрованный комплексный сигнал сцены на видео частоте) поступают на однополосный модулятор (квадратурный балансный смеситель), на выходе которого с помощью сигнала промежуточной частоты получают аналоговый сигнал сцены на промежуточной частоте, далее сигнал сцены с помощью сигнала гетеродина и смесителя переносится на несущую частоту. Дополнительно имитируется сигнал помехи на несущей частоте РЛС. Оба сигнала (сигнал сцены и помехи) после сложения поступают на проверяемую РЛС.
Данное устройство обеспечивает имитацию сигнала сцены импульсной РЛС различного вида применения с учетом заданной исходными данными импульсной характеристики сцены, при не однозначном периоде повторения и воббуляции периода повторения зондирующего сигнала.
Недостатками устройства являются: 1) не полная имитация сигнала сцены, связанная с работой по виртуальному сигналу передатчика, заданного исходными данными, не имитируется рассеяние отраженного сигнала по доплеровской частоте при работе со сложным сигналом, имитация рассеяния сигнала по доплеровской частоте возможна только для точечных целей при работе с простым сигналом, 2) для обеспечения когерентности имитируемых сигналов необходимо через кабель связи синхронизировать имитатор опорной эталонной частотой и периодом повторения от проверяемой РЛС, 3) имитация отраженного сигнала, связанная с существенным изменением дальности и доплеровской частоты элементов сцены за время синтеза апертуры, не предусматривается.
Целью предлагаемого изобретения является повышение достоверности имитации отраженного сигнала РСА.
Поставленная цель реализуется за счет связи РСА и имитатора сигнала через радиоканал, при которой имитатор сигнала в реальном времени принимает зондирующий сигнал РСА, переносит его на промежуточную частоту, оцифровывает, задерживает в начало имитируемого сигнала сцены с соответствующей радиальной скоростью, свертывает со смещенной, ранее рассчитанной для каждого такта обновления импульсной характеристикой сцены, компенсирует влияние введенного смещения импульсной характеристики сцены на имитируемое радиолокационное изображение сцены, переносит полученный сигнал на несущую частоту и переизлучает в сторону РСА.
Для решения поставленной цели имитатор сцены [4], содержащий первое оперативное запоминающее устройство (ОЗУ), первый и второй фильтр с конечной импульсной характеристикой, последовательно соединенные первый цифроаналоговый преобразователь и третий полосовой фильтр, последовательно соединенные второй цифроаналоговый преобразователь и четвертый полосовой фильтр, однополосный модулятор, в дальнейшем тексте называемый квадратурным модулятором, второе ОЗУ, выход которого соединен с вторыми входами первого и второго фильтров с конечной импульсной характеристикой, управляемый гетеродин, синхронизатор, в дальнейшем тексте называемый кварцевым генератором, первый счетчик импульсов дальности, выход которого соединен с третьим входом первого ОЗУ, синтезатор частоты, процессор, второй вход-выход которого соединен с входами-выходами синтезатора частоты, первого счетчика импульсов дальности, управляемого гетеродина и второго ОЗУ, выход управляемого гетеродина соединен с третьим входом квадратурного модулятора, первый вход-выход процессора является интерфейсной связью имитатора с РСА, через который вводятся исходные данные о эффективной площади элементов сцены и их координатах, которые используются процессором для вычисления текущего значения комплексной импульсной характеристики сцены, отличается тем, что вводятся последовательно соединенные антенна, антенный переключатель, направленный ответвитель, квадратурный смеситель, первый полосовой фильтр, первый аналого-цифровой преобразователь (АЦП), выход которого соединен с первым входом первого ОЗУ, второй полосовой фильтр, соединенный через второй АЦП с вторым входом первого ОЗУ, второй счетчик импульсов дальности, соединенный с четвертым входом первого ОЗУ, последовательно соединенные сумматор комплексных чисел и умножитель комплексных чисел, первый и второй выходы которого соединены с входами первого и второго цифроаналогового преобразователя соответственно, генератор прямого цифрового синтеза, выход которого соединен с вторым входом умножителя комплексных чисел, усилитель, выход которого соединен со входом антенного переключателя, последовательно соединенные детектор и пороговое устройство, выход которого соединен со входом процессора, выход кварцевого генератора через синтезатор частоты соединен с входом первого счетчика импульсов дальности, второй выход синтезатора частоты соединен с входами второго счетчика импульсов дальности и генератора прямого цифрового синтеза, второй выход направленного ответвителя соединен с входом детектора, второй выход квадратурного смесителя соединен с входом второго полосового фильтра, выход управляемого гетеродина соединен с вторым входом квадратурного смесителя, выход третьего полосового фильтра соединен с первым входом квадратурного модулятора, выход четвертого полосового фильтра соединен с вторым входом квадратурного модулятора, первый выход первого ОЗУ через первый фильтр с конечной импульсной характеристикой соединен с первым входом сумматора комплексных чисел, второй выход первого ОЗУ через второй фильтр с конечной импульсной характеристикой соединен с вторым входом сумматора комплексных чисел, второй вход-выход процессора соединен с входами-выходами второго счетчика импульсов дальности и генератора прямого цифрового синтеза, выход квадратурного модулятора соединен с входом усилителя.
Сущность изобретения поясняется дальнейшим описанием и чертежами имитатора сигнала РЛС.
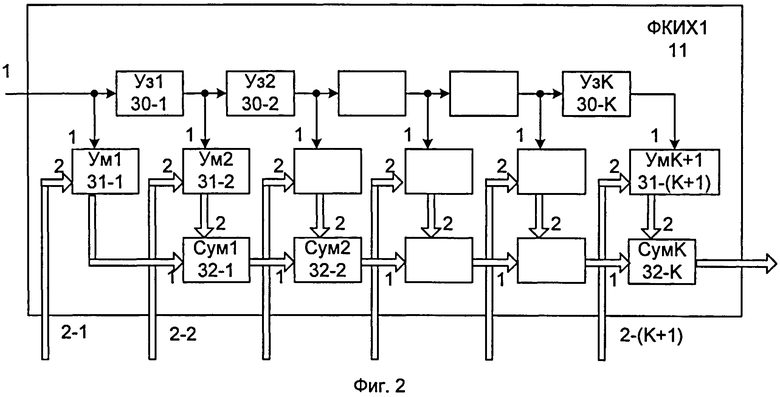
На фиг.1 изображена структура имитатора РЛС.
На фиг.2 изображен фильтр с конечной импульсной характеристикой.
На фиг.1 приняты следующие обозначения:
1 - антенна имитатора (А);
2 - антенный переключатель (АП);
3 - направленный ответвитель (НО);
4 - детектор (Д);
5 - квадратурный смеситель (КС);
6 - полосовой фильтр (ПФ1);
7 - первый аналого-цифровой преобразователь (АЦП1);
8 - второй полосовой фильтр (ПФ2);
9 - второй аналого-цифровой преобразователь (АЦП2);
10 - первое оперативное запоминающее устройство (ОЗУ1);
11 - первый фильтр с конечной импульсной характеристикой (ФКИХ1);
12 - сумматор комплексных чисел (КСум);
13 - второй фильтр с конечной импульсной характеристикой (ФКИХ2);
14 - умножитель комплексных чисел (КУм);
15 - первый цифроаналоговый преобразователь (ЦАП1);
16 - второй цифроаналоговый преобразователь (ЦАП2);
17 - пороговое устройство (ПУ);
18 - управляемый гетеродин (УГ);
19 - кварцевый генератор (КB);
20 - первый счетчик импульсов дальности (СИД1);
21 - второй счетчик импульсов дальности (СИД2);
22 - второе оперативное запоминающее устройство (ОЗУ2);
23 - третий полосовой фильтр (ПФ3);
24 - четвертый полосовой фильтр (ПФ4);
25 - процессор (ПРЦ);
26 - синтезатор частоты (СЧ);
27 - генератор прямого цифрового синтеза (ГПЦС);
28 - квадратурный модулятор (КМ);
29 - усилитель (УС).
На фиг.2 приняты следующие обозначения:
30-k - устройство задержки, равной половине разрешения сигнала РЛС по времени (Узk);
31-k - умножитель (Умk);
32-k - сумматор (Cумk).
На фиг.1 последовательно соединены антенна 1, антенный переключатель 2, направленный ответвитель 3, квадратурный смеситель 5, первый полосовой фильтр 6, первый аналого-цифровой преобразователь (АЦП) 7, первое оперативное запоминающее устройство (ОЗУ) 10, первый фильтр с конечной импульсной характеристикой 11, сумматор комплексных чисел 12, умножитель комплексных чисел 14, первый цифроаналоговый преобразователь 15, третий полосовой фильтр 23, квадратурный модулятор 28, усилитель 29, второй выход квадратурного смесителя 5 через последовательно подключенные второй полосовой фильтр 8 и второй АЦП 9 соединен со вторым входом первого ОЗУ 10, второй выход направленного ответвителя 3 через последовательно подключенные детектор 4 и пороговое устройство 17 соединен с входом процессора 25, второе ОЗУ 22 соединено с вторыми входами первого и второго фильтров с конечной импульсной характеристикой 11 и 13 соответственно, второй выход первого ОЗУ 10 через второй фильтр с конечной импульсной характеристикой 13 соединен с вторым входом сумматора комплексных чисел 12, второй выход умножителя комплексных чисел 14 через последовательно соединенные второй цифроаналоговый преобразователь 16 и четвертый полосовой фильтр 24 соединен с вторым входом квадратурного модулятора 28, первый вход-выход процессора 25 является интерфейсной связью имитатора с внешним оператором, второй вход-выход процессора 25 соединен с входом-выходами управляемого гетеродина 18, синтезатора частоты 26, первого 20 и второго 21 счетчиков импульсов дальности, второго ОЗУ 22 и генератора прямого цифрового синтеза 27, выход усилителя 29 соединен с входом антенного переключателя 2, выход кварцевого генератора 19 через последовательно соединенные синтезатор частоты 26 и первый счетчик импульсов дальности 20 соединен с третьим входом первого ОЗУ 10, второй выход синтезатора частоты 26 через второй счетчик импульсов дальности 21 соединен с четвертым входом первого ОЗУ 10, вход генератора прямого цифрового синтеза 27 соединен с вторым выходом синтезатора частоты 26, выход управляемого гетеродина 18 соединен с вторым входом квадратурного смесителя 5 и с третьим входом квадратурного модулятора 24, выход генератора прямого цифрового синтеза 27 соединен с вторым входом умножителя комплексных чисел 14.
На фиг.2 первый вход фильтра с конечной импульсной характеристикой 11 соединен с входом последовательно соединенных K устройств задержки с 30-1 по 30-K, входы всех устройств задержки 30-k соединены с соответствующими первыми входами умножителей 31-k, выход устройства задержки 30-K соединен с первым входом умножителя 31-(K+1), вторые входы умножителей 31-k для 

Управляемый гетеродин 18 может быть построен на базе синтезатора частоты с петлей фазовой автоподстройки частоты [5, рис.3.3а, с.66].
В качестве квадратурного смесителя 5 и квадратурного модулятора 28 могут быть использованы соответственно микросхемы НМС522 и HMC924LC5 фирмы Hittite Microwave Corp.
В качестве синтезатора частоты 26 и генератора прямого цифрового синтеза 27 может быть использован генератор прямого цифрового синтеза на базе микросхемы DD9959 фирмы Analog Device.
Первый 11 и второй 13 фильтры с конечной импульсной характеристикой, совместно с сумматором 12 и умножителем комплексных чисел 14 могут быть реализованы на программируемой логической интегральной схеме Virtex6 XC6VLX130T.
Остальные элементы широко используются в радиолокации и не требуют пояснений по реализации.
Алгоритм работы имитатора включает подготовку к работе и боевую работу. Подготовка к работе начинается с приходом на первый вход-выход процессора 25 исходных данных от оператора о РСА, его носителе и сцене:
- полоса сигнала РСА ΔfC;
- несущая частота РСА fН;
- ширина диаграммы направленности (ДНА) по азимуту Δθ и углу места Δβ;
- угловые координаты оси визирования РСА (θ, β) относительно осей носителя РСА;
- азимутальное разрешение РСА δАЗ;
- вектор траекторией скорости носителя РСА (VTX, VTY, VTZ) на участке коррекции (предполагается равномерный прямолинейный полет);
- начальные координаты траектории носителя РСА (XTO, YTO, ZTO);
- начальные координаты i-тых точечных целей (


- вектор скорости i-тых точечных целей (

- координаты i-тых точек фона (Xi, Yi, Zi);
- эффективные площади рассеяния (ЭПР) i-тых целей 

- размер РЛИ имитируемого кадра сцены по горизонтальной дальности 2ΔГРЛИ;
- число последовательных независимых кадров сцены (интервалов синтеза) МС.
На основании исходных данных процессор 25 проводит расчеты, включающие определение:
- ширины доплеровского спектра сигнала ΔFД;
- периода обновления импульсной характеристики сцены T<1/2ΔFД;
- шага выборки сигнала РСА по времени 
- координат точки привязки (X0, Y0, Z0) кадра радиолокационного изображения (РЛИ) сцены (точка пересечения поверхности с осью ДНА (θ, β) в начале интервала коррекции);
- длительности интервала синтеза Тсинт(θ, β, δАЗ);
- времени прохождения участка коррекции ТКОР=МСТСИНТ(θ, β, δАЗ);
- координаты носителя РСА (ХТ(р), YT(p), ZT(p)) в моменты времени рТ≤ТКОР;
- траекторной дальности до точки привязки R0(р) в моменты времени рТ;
- разбиение реализации R0(p) на M последовательных смежных участков R0(р)=R0(n, m), обеспечивающее кусочную аппроксимацию каждого m-того участка R0(n, m) полиномом второй степени, при этом:
Nm - число интервалов длительностью Т на m-том участке траектории;




δ<0,0625 - коэффициент, определяющий допустимую погрешность имитации фазы сигнала, отраженного точкой привязки;
λ - длина волны зондирующего сигнала РСА;
- координаты целей (


- траекторной дальности от РСА до элементов сцены 

- частоты гетеродина fГ=fН-fПР, с помощью которого принимаемый сигнал РСА смещается в имитаторе на промежуточную частоту fПР=ΔfC/2;
- амплитуды сигнала, отраженного элементом сцены на m-том участке траектории:

где Qiw и Фiw - законы флюктуации амплитуды и фазы в i-том элементе сцены на w-том интервале синтеза;
- коэффициентов аппроксимации изменения доплеровской частоты сигнала fД0(t, m), отраженного точкой привязки на каждом m-том участке траектории

где с - скорость света;


- закон изменения частоты выборки задержанного имитатором сигнала на каждом m-том участке траектории:

- опережение начала имитируемого сигнала сцены от точки привязки
- аппроксимацию импульсной характеристики сцены по времени t(n, m):
B(n, m, q)=B(n, m, k+<q0)=expjφ0(n, m)B(n, m, k+q0)exp[-jφ0(n, m)]=expjφ0(n, m)G(n, m, k+q0),
где G(n, m, k) - импульсная характеристика сцены, смещенная по дальности на 
q - индекс дальности;
][ - целая часть числа;
k=q-q0 - разница в индексах дальности от РСА до элемента сцены и ближней точки кадра сцены;

где 

φi(n, m)=2πfнki(n, m)ΔT1 - фаза сигнала, отраженного от i-того элемента сцены, полученного от зондирующего сигнала РСА в момент t(n, m).
Весовое суммирование амплитуд сигналов сцены Ai(n, m) в выражении G(n, m, k) обеспечивает при боевой работе плавное изменение положения имитируемых сигналов сцены по дальности между узлами сетки дальности [6, с.11-13], соответственно при приеме имитированного сигнала в РСА обеспечивается снижение боковых лепестков сигналов сцены, связанных с дискретностью имитации задержки сигналов сцены по времени.
По результатам расчетов процессор 25 через второй вход-выход вводит значения смещенной импульсной характеристики сцены G(n, m, k) во второе ОЗУ 22, параметры частоты (



С началом излучения РСА антенной 1 имитатора через радиолинию связи принимаются зондирующие сигналы, которые через антенный переключатель 2 и детектор 4 поступают на пороговое устройство 17. При первом превышении сигналом детектора 4 порога процессор 25 снимает исходное состояние с синтезатора частоты 26, счетчиков 21, 22 и переводит имитатор в режим боевой работы. При этом синтезатор частоты 26 начинает генерацию частот FСЧ1 и FСЧ2 на первом и втором выходах соответственно, аналогично генератор прямого цифрового синтеза 27 формирует цифровые выборки квадратурных сигналов НС(l, m)=соsφД0(l, m) и HS(l, m)=sinφД0(l, m), где φД0(l=0, m)=φ0(n=0, m), на доплеровской частоте 
Индекс выборки сигнала l предполагает, что

LΔT2=T, fД0(l, m)<<FСЧ2=1/ΔТ2, что обеспечивает учет изменения фазы отраженного сигнала от элементов сцены на длительности зондирующего сигнала РСА.
Процессор 25 с тактом Т через второй вход-выход подает на ОЗУ 22 текущий адрес (n, m) считывания импульсной характеристики сцены G(n, m, k), записанной во втором ОЗУ 22, при этом начальный код адреса равен нулю. В начале каждого m-того участка траектории процессор 25 переключает настройки синтезатора частоты 26 и генератора прямого цифрового синтеза 27, в соответствии с рассчитанными ранее значениями (

Принятый сигнал РСА U(t) с первого выхода направленного ответвителя 3 поступает на квадратурный смеситель 5, на второй вход которого приходит сигнал управляемого гетеродина 18 на частоте fГ. Первый квадратурный выходной сигнал UC квадратурного смесителя 5 через последовательно соединенные первый полосовой фильтр 6 и первый аналого-цифровой преобразователь (АЦП) 7 поступает на первый вход первого ОЗУ 10. Второй квадратурный сигнал US с выхода квадратурного смесителя 5 через аналогичные второй полосовой фильтр 8 и второй АЦП 9 поступает на второй вход первого ОЗУ 10. Адрес записи квадратурного сигнала на первом и втором входах первого ОЗУ 10 формируется первым счетчиком импульсов дальности 20, на вход которого приходит частота FСЧ1, сформированная на первом выходе синтезатора частоты 26. Считывание записанного сигнала из первого ОЗУ 10 производится по адресу, формируемому вторым счетчиком дальности 21 и начнется с опережением сигнала от точки привязки сцены на τН, определяемой исходным кодом q0, введенным во второй счетчик импульсов дальности 21 процессором 25. Текущая радиальная скорость РСА относительно условной точки привязки V0(t) определяет частоту считывания сигнала из ОЗУ 10 на m-том участке траектории 
Задержанный квадратурный сигнал с первого и второго выходов первого ОЗУ 10 поступает на цифровую схему формирования отраженного сигнала в соответствии со смещенной импульсной характеристикой сцены G(n, m, k), приходящей с второго ОЗУ 22 и обновляющейся через каждый период Т. Схема формирования отраженного сигнала состоит из идентичных фильтров 11 и 13 с конечной импульсной характеристикой и сумматора комплексных чисел 12. Квадратурные составляющие SC(n, q) и SS(n, q) имитируемого отраженного сигнала S(n, q), индекс m опущен, с выходов сумматора комплексных чисел 12 поступают на первый вход умножителя комплексных чисел 14, на второй вход которого поступает квадратурный сигнал генератора прямого цифрового синтеза 27 с частотой доплера точки привязки fД0(l, m). В результате на выходе умножителя комплексных чисел 14 получают сдвинутый на частоту fД0(l, m) сформированный отраженный сигнал сцены, т.е. свертку импульсной характеристики B(n, m, q) с принятым сигналом РСА U(n, m, q):

где 
Pl - оператор преобразования функции {} дискретного времени n на дискретное время l;
⊕ - оператор свертки;
φ0(-1, m) - начальное значение фазы доплеровского сигнала, имитируемого генератором прямого цифрового синтеза 27, равное фазе доплеровского сигнала в момент, предшествующей смене m-1 на m.
Квадратурный сигнал с выхода умножителя комплексных чисел 14 преобразуются в аналоговую форму с помощью цифроаналоговых преобразователей 15 и 16 и далее сглаживается аналогичными полосовыми фильтрами 23 и 24. Выход полосовых фильтров 23 и 24 на промежуточной частоте поступает на первый и второй входы квадратурного модулятора 28, где с помощью гетеродинного сигнала, поступающего на его третий вход, переносится на несущую частоту. Выходной сигнал квадратурного модулятора 28 через усилитель 29 и антенный переключатель 2 поступает в антенну 1 и излучается в сторону РСА. Выходной сигнал с антенны 1 является имитируемым на несущей частоте сигналом сцены.
Фильтр с конечной импульсной характеристикой 11 и аналогичный ему фильтр 13 приведен на фиг.2. Последовательно стоящие устройства задержки 30-k создают задержку, кратную ΔT1 (половине разрешения сигнала РСА по времени). Число элементов задержки K соответствует длине импульсной характеристики сцены. Комплексное умножение и сложение в узлах 31-k и 32-k фильтров с конечной импульсной характеристикой 11 и 13 производится с тактом выборки ТСЧ2=1-/FСЧ2. При этом сигнал на выходе сумматора комплексных чисел 12 на каждом m-том участке траектории равен:

где UC(n, k) и US(n, k) - квадратурные составляющие принятого имитатором сигнала РСА на выходах первого ОЗУ 10;
SC(n, q) и SS(n, q) - квадратурные сигналы имитируемого сигнала на первом и втором выходах сумматора комплексных чисел 12;
S1(n, q) и S2(n, q) - комплексные сигналы на выходах первого 11 и второго 15 фильтра с конечной импульсной характеристикой;
SiC(n, q) и SiS(n, q) - квадратурные составляющие i-того фильтра с конечной импульсной характеристикой.
Техническим преимуществом предлагаемого имитатора сигнала сцены перед прототипом является возможность достоверной имитации сигнала РСА от трехмерной сцены без ограничения на вид модуляции зондирующего сигнала, что позволяет проводить проверку работы РСА как по наземным подвижным, так и не подвижным целям, дальность до которых за время синтеза может существенно изменяться по сравнению с размером элемента разрешения по дальности. Имитатор обеспечивает плавное во времени изменение дальности и фазы имитируемых сигналов от всех элементов сцены, при этом не требуется связь РСА с имитатором радиочастотным кабелем.
Пользуясь сведениями, представленными в материалах заявки, имитатор сигнала РЛС может быть изготовлен по существующей, известной в радиопромышленности технологии на базе известных комплектующих изделий и использован при проверках РЛС на стендовых испытаниях.
Литература
1. Патент США 4450447 от 22.05.84 "Synthetic aperture radar target simulator".
2. Патент США 6075480 от 13.07.00 "Down range return simulator".
3. Патент США 7365677 от 29.04.08 "Compact radar test range".
4. Патент США 6150976 от 21.11.00 "Synthesis of overlapping chirp waveforms".
5. Рыжков А.В., Попов В.Н. "Синтезаторы частот в технике радиосвязи". - М.: Радио и связь, 1991.
6. Островитянов Р.В., Басалов Ф.А. "Статистическая теория радиолокации протяженных целей". - М.: Радио и связь, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОГО СИГНАЛА СЦЕНЫ | 2014 |
|
RU2549884C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2008 |
|
RU2412449C2 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОГО СИГНАЛА МОНОИМПУЛЬСНОЙ РЛС | 2008 |
|
RU2391682C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОГЕРЕНТНОГО ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ДЛЯ РЛС С ПЕРИОДИЧЕСКОЙ ЧМ МОДУЛЯЦИЕЙ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ СПОСОБ | 2006 |
|
RU2347235C2 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСТОЯННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ПО ДАЛЬНОСТИ В ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С КВАЗИСЛУЧАЙНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2491572C1 |
Изобретение относится к радиолокации, в частности к имитаторам сигнала радиолокационной станции с синтезированием апертуры (РСА), работающей по наземным и морским целям, и может быть использовано для исследования процессов обнаружения и сопровождения целей РСА на фоне протяженной поверхности. Достигаемый технический результат - повышение достоверности имитации отраженного сигнала РСА. Указанный результат достигается за счет связи РСА и имитатора сигнала через радиоканал, при которой имитатор сигнала в реальном времени принимает зондирующий сигнал РСА, переносит его на промежуточную частоту, оцифровывает, задерживает в начало имитируемого сигнала сцены с соответствующей радиальной скоростью, свертывает со смещенной, ранее рассчитанной для каждого такта обновления импульсной характеристикой сцены, компенсирует влияние введенного смещения импульсной характеристики сцены на имитируемое радиолокационное изображение сцены, переносит полученный сигнал на несущую частоту и переизлучает в сторону РСА. 2 ил.
Устройство имитатора сигнала радиолокационной станции с синтезированием апертуры (РСА) содержит первое оперативное запоминающее устройство (ОЗУ), первый и второй фильтр с конечной импульсной характеристикой, последовательно соединенные первый цифроаналоговый преобразователь и третий полосовой фильтр, последовательно соединенные второй цифроаналоговый преобразователь и четвертый полосовой фильтр, квадратурный модулятор, второе ОЗУ, выход которого соединен с вторыми входами первого и второго фильтров с конечной импульсной характеристикой, управляемый гетеродин, кварцевый генератор, первый счетчик импульсов дальности, выход которого соединен с третьим входом первого ОЗУ, синтезатор частоты, процессор, второй вход-выход которого соединен с входами-выходами синтезатора частоты, первого счетчика импульсов дальности, управляемого гетеродина и второго ОЗУ, выход управляемого гетеродина соединен с третьим входом квадратурного модулятора, первый вход-выход процессора является интерфейсной связью имитатора с РСА, через который вводятся исходные данные о эффективной площади элементов сцены и их координатах, которые используются процессором для вычисления текущего значения комплексной импульсной характеристики сцены, отличается тем, что вводятся последовательно соединенные антенна, антенный переключатель, направленный ответвитель, квадратурный смеситель, первый полосовой фильтр, первый аналого-цифровой преобразователь (АЦП), выход которого соединен с первым входом первого ОЗУ, второй полосовой фильтр, соединенный через второй АЦП с вторым входом первого ОЗУ, второй счетчик импульсов дальности, соединенный с четвертым входом первого ОЗУ, последовательно соединенные сумматор комплексных чисел и умножитель комплексных чисел, первый и второй выходы которого соединены с входами первого и второго цифроаналогового преобразователя соответственно, генератор прямого цифрового синтеза, выход которого соединен с вторым входом умножителя комплексных чисел, усилитель, выход которого соединен со входом антенного переключателя, последовательно соединенные детектор и пороговое устройство, выход которого соединен со входом процессора, выход кварцевого генератора через синтезатор частоты соединен с входом первого счетчика импульсов дальности, второй выход синтезатора частоты соединен с входами второго счетчика импульсов дальности и генератора прямого цифрового синтеза, второй выход направленного ответвителя соединен с входом детектора, второй выход квадратурного смесителя соединен с входом второго полосового фильтра, выход управляемого гетеродина соединен с вторым входом квадратурного смесителя, выход третьего полосового фильтра соединен с первым входом квадратурного модулятора, выход четвертого полосового фильтра соединен с вторым входом квадратурного модулятора, первый выход первого ОЗУ через первый фильтр с конечной импульсной характеристикой соединен с первым входом сумматора комплексных чисел, второй выход первого ОЗУ через второй фильтр с конечной импульсной характеристикой соединен с вторым входом сумматора комплексных чисел, второй вход-выход процессора соединен с входами-выходами второго счетчика импульсов дальности и генератора прямого цифрового синтеза, выход квадратурного модулятора соединен с входом усилителя, на первый вход-выход процессора вводятся дополнительные данные о проверяемой РСА, включая данные о полосе сигнала, несущей частоте, ширине диаграммы направленности (ДНА), угловых координатах оси ДНА, азимутальном разрешении, данные о носителе РСА, включая начальные координаты траектории и координаты вектора скорости на участке синтеза, данные о целях, включая их начальные координаты и координаты вектора скорости на интервале синтеза, координаты точек фона, число независимых последовательно формируемых кадров сигнала сцены, процессор на основании полученной от оператора информации рассчитывает длительность интервала синтеза и интервал имитации сигнала сцены, период обновления смещенной импульсной характеристики сцены, частоту выборки сигнала РСА по времени, частоту гетеродина, траекторную дальность РСА до элементов сцены, амплитуду сигнала, отраженного элементами сцены на каждом интервале синтеза, координаты точки привязки кадра имитируемого сигнала, закон изменения частоты выборки задержанного сигнала, закон изменения доплеровской частоты сигнала, отраженного точкой привязки, опережение начала имитируемого сигнала сцены от точки привязки, смещенную импульсную характеристику сцены, по результатам расчетов вводит значения смещенной импульсной характеристики во второе ОЗУ, параметры доплеровской частоты сигнала от точки привязки в генератор прямого цифрового синтеза, параметры формируемых частот в синтезатор частоты, коды исходного состояния первого и второго счетчиков дальности, определяет начало и конец интервала имитации сигнала, включает боевой режим на интервале имитации сигнала, формирует такт обновления импульсной характеристики сцены и адрес ее считывания из второго ОЗУ.
| US 6150976 A1, 21.11.2000 | |||
| СПОСОБ ИМИТАЦИИ РАДИОСИГНАЛА, ОТРАЖЕННОГО ОТ ПРОСТРАНСТВЕННО РАСПРЕДЕЛЕННОЙ ДИНАМИЧЕСКОЙ РАДИОФИЗИЧЕСКОЙ СЦЕНЫ, В РЕАЛЬНОМ ВРЕМЕНИ | 2008 |
|
RU2386143C2 |
| Прямоточный электрокотел | 1946 |
|
SU72768A1 |
| Автомат для расфасовки густых и вязких продуктов в консервную или иную тару | 1957 |
|
SU111702A1 |
| Способ подсечки панелей и блоков | 1951 |
|
SU99209A1 |
| US 7602332 B1, 13.10.2009 | |||
| US 5431568 A, 11.07.1995 | |||
| WO 2007069253 A1, 21.06.2007 | |||
| US 7145504 B1, 05.12.2006 | |||

