Изобретение относится к робототехнике и может быть использовано для создания новых моделей роботов.
Наиболее близким по технической сущности к предлагаемому изобретению является автономный катящийся робот (United States Patent №6,414,457, Jul. 2, 2002), содержащий полую сферу, имеющую гладкую наружную и внутреннюю поверхность, два набора роторов, установленных внутри сферы в диаметральном и перпендикулярном направлении друг относительно друга так, что геометрические оси каждой из пары роторов перпендикулярны друг другу и пересекаются в геометрическом центре сферы, два передаточных механизма, соединяющих каждый из вышеупомянутых наборов роторов. Движение робота управляется пультом дистанционного управления.
К недостаткам известного робота относят низкую эффективность движения и низкую маневренность.
Создание данного изобретения направленно на расширение возможностей для создания новых конструкций ШР, повышение эффективности движения, подвижности, маневренности и эксплуатационной надежности.
На чертеже изображена конструкция заявляемого робота-шара.
Робот с шаровыми движителями содержит сферу 1, которая является его оболочкой. На внутренней поверхности сферы 1 робота-шара устанавливается двигатель 2, так что геометрическая ось 3 двигателя 2 проходит через геометрический центр вышеупомянутой сферы 1. Двигатель 2 соединяется с двигателем 4, каркасом в форме четверти окружности 5 с возможностью вращения вокруг оси 3. Причем так, что двигатель 4 крепится своим основанием к каркасу 5. Каркас в форме четверти окружности 6 соединяет между собой выходной вал двигателя 4 и коробку 7 для размещения в ней источника питания робота, так что геометрическая ось коробки 7 проходит через геометрический центр сферы 1 и перпендикулярна оси 3.
Шаровой робот работает следующим образом.
Управляющий сигнал (дистанционно или непосредственно) передается на двигатели 2 и 4, которые начинают вращать через свои выходные валы каркасы 5 и 6 вокруг осей 3 и 8. При вращении каркасов 5 и 6 происходит перемещение двигателя 4 и коробки 7 внутри пространства сферы 1. Так, управляемое перемещение подвижных масс конструкции приводит шар в движение.
Сфера робота-шара составляется из двух полусфер, соединенных между собой. Вышеупомянутая сфера, полая и гладкая внутри, может быть гладкой, рифленой, с шипами, с лопостями или с выдавленными каналами с внешней стороны. Это обеспечит возможность движения робота-шара не только по твердой поверхности, но и в жидкой, вязкой, расплавленной, рыхлой средах.
Для поддержки связи с шаровым роботом можно использовать проводной и беспроводной каналы связи.
Внутри сферы робота-шара можно разместить приемники управляющих сигналов, поддерживающих радиосвязь, инфракрасное, ультразвуковое и речевое управление роботом.
Корпус робота с шаровыми движителями при использовании радиоканала связи необходимо изготавливать из радиопрозрачных материалов.
Шаровой робот может быть как автономный, с источником питания, размещенным внутри сферы, так и неавтономный, с источником питания, размещенным вне сферы.
Основным достоинством такого робота является возможность создания абсолютно герметичного корпуса, не имеющего зазоров для вывода осей и т.п. Поэтому его можно использовать, прежде всего, как робот-разведчик или робот-исследователь в экстремальных условиях. Еще одной важной особенностью ШР является его способность движения как по твердой поверхности, так и в жидкой фазе, без перехода на другой движитель (например, с колес на винт, как в амфибиях). Это делает ШР весьма перспективным для военных целей.
Преимуществом данного изобретения является то, что сферическая геометрия корпуса позволяет совершать свободное всенаправленное перемещение, обеспечивая исключительную подвижность и маневренность. Шаровой робот способен быстро изменить направление движения с нулевым радиусом разворота.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ШАР | 2015 |
|
RU2600043C2 |
| Шарообразный робот (варианты) | 2016 |
|
RU2658683C1 |
| СФЕРОМОБИЛЬ | 2013 |
|
RU2554905C2 |
| ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНАЯ УСТАНОВКА ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2783719C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2098337C1 |
| СИЛОВАЯ ИНЕРЦИОННАЯ УСТАНОВКА ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2044158C1 |
| МОБИЛЬНЫЙ РОБОТ | 1991 |
|
RU2026227C1 |
| УНИВЕРСАЛЬНЫЙ ВРАЩАТЕЛЬНО-ТОЛКАТЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2008 |
|
RU2418959C2 |
| ВРАЩАТЕЛЬНО-ТОЛКАТЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2470168C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВОДНОГО ПЛАНЕРА | 2018 |
|
RU2680678C1 |
Изобретение относится к области робототехники. Робот-шар содержит полую сферу, установленные внутри сферы двигатели, зафиксированные таким образом, что их геометрические оси перпендикулярны друг другу и пересекаются в геометрическом центре сферы. Для повышения эффективности движения, подвижности, маневренности и эксплуатационной надежности один из двигателей установлен на внутренней поверхности сферы и соединен посредством каркаса, выполненного в форме четверти окружности, со вторым двигателем, установленным на свободном конце упомянутого каркаса и снабженным аналогичным каркасом, связанным с его валом. 1 ил.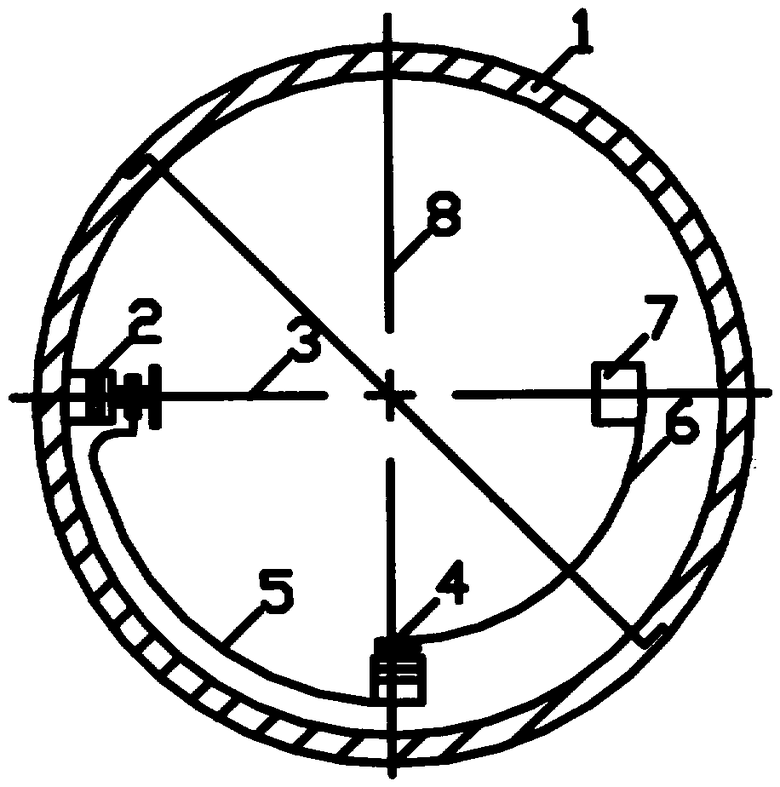
Робот-шар, содержащий полую сферу, установленные внутри сферы двигатели, зафиксированные таким образом, что их геометрические оси перпендикулярны друг другу и пересекаются в геометрическом центре сферы, отличающийся тем, что один из двигателей установлен на внутренней поверхности сферы и соединен посредством каркаса, выполненного в форме четверти окружности, со вторым двигателем, установленным на свободном конце упомянутого каркаса и снабженным аналогичным каркасом, связанным с его валом.
| US 6414457 B1, 02.07.2002 | |||
| Самоходная игрушка | 1985 |
|
SU1457938A1 |
| RU 2004300 C1, 02.09.1991 | |||
| GB 1179626 А, 28.01.1970 | |||
| US 4541814 A, 17.09.1985 | |||
| JP 7285475 A, 31.10.1995 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

