Изобретение относится к робототехнике и может быть использовано для создания новых моделей как автономных, так и дистанционно управляемых мобильных роботов.
Известно самоходное средство (патент РФ №2315686, МПК B25J 9/00; B25J 11/00, опубл. 2008), характеризующееся тем, что содержит полую сферу, установленные внутри сферы двигатели, зафиксированные таким образом, что их геометрические оси перпендикулярны друг другу и пересекаются в геометрическом центре сферы; один из двигателей установлен на внутренней поверхности сферы и соединен посредством каркаса, выполненного в форме четверти окружности, со вторым двигателем, установленным на свободном конце упомянутого каркаса и снабженным аналогичным каркасом, связанным с его валом.
К недостаткам указанного робота относят низкую эффективность движения и низкую маневренность, связанные с тем, что для реализации роботом поворота в любом направлении необходимо, чтобы один из двигателей, установленный на внутренней поверхности сферы, был в верхней части шара.
Наиболее близким по технической сущности к предлагаемому техническому решению (прототип) является робот-шар (патент РФ №106215, МПК B62D 57/00, опубл. 2011), который содержит корпус, выполненный в виде полого шара, внутренний каркас, соединенный с корпусом шарниром, закрепленный на внутреннем каркасе первый электропривод, вал которого соединен с корпусом; так же на каркасе закреплен второй электропривод, на обоих концах сквозного вала которого закреплены дебалансы.
Недостатком указанного устройства является низкая маневренность, связанная с тем, что для устойчивого прямолинейного движения требуется установить дебалансы перпендикулярно внутреннему каркасу, что проблематично контролировать на пересеченной местности.
Задачей предлагаемого изобретения является создание робота-шара, обеспечивающего повышение эффективности движения, маневренности и эксплуатационной надежности.
Задача решается следующим образом. В робот-шар, содержащий полый корпус, выполненный в виде двух соединенных полусфер, и рабочий орган, введен параллельный манипулятор, состоящий из радиально расположенных звеньев, концы которых соединены с шарнирами, закрепленными на внутренней поверхности корпуса и рабочем органе, который снабжен блоком управления, системой приводов и блоком питания, причем звенья выполнены с возможностью изменения их длины и согласованного с ним управляемого смещения рабочего органа.
Сущность устройства поясняется чертежами.
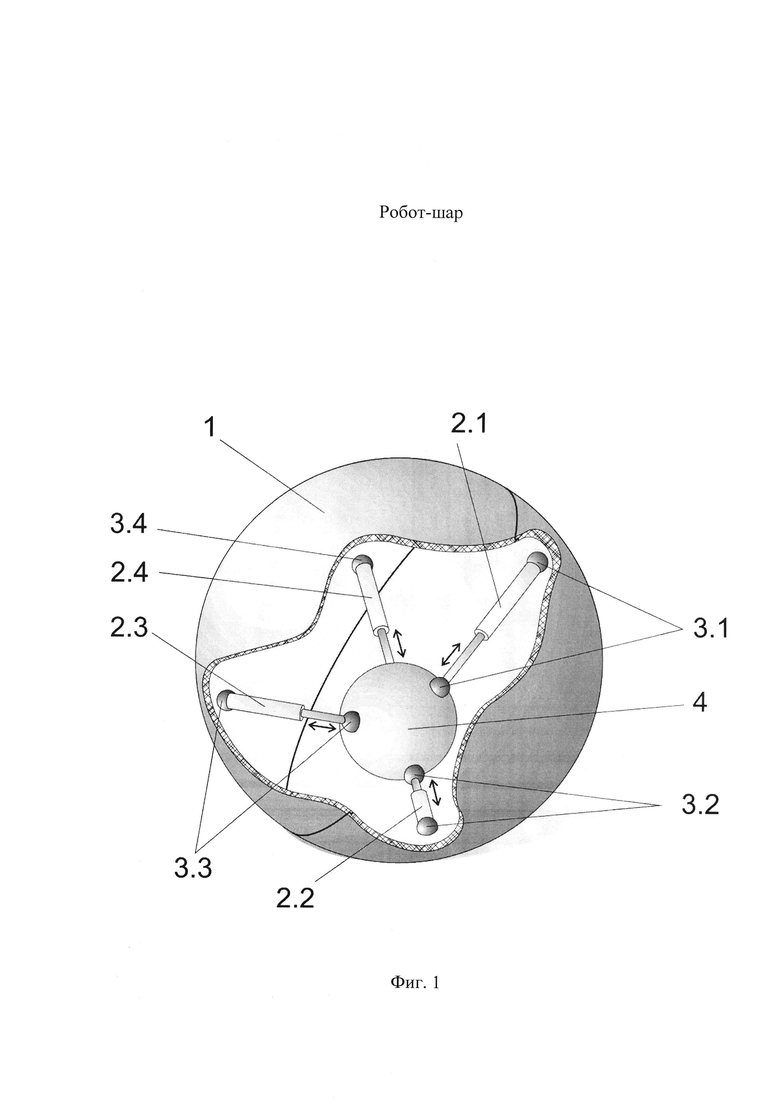
На фиг. 1 изображена конструкция заявляемого робота-шара.
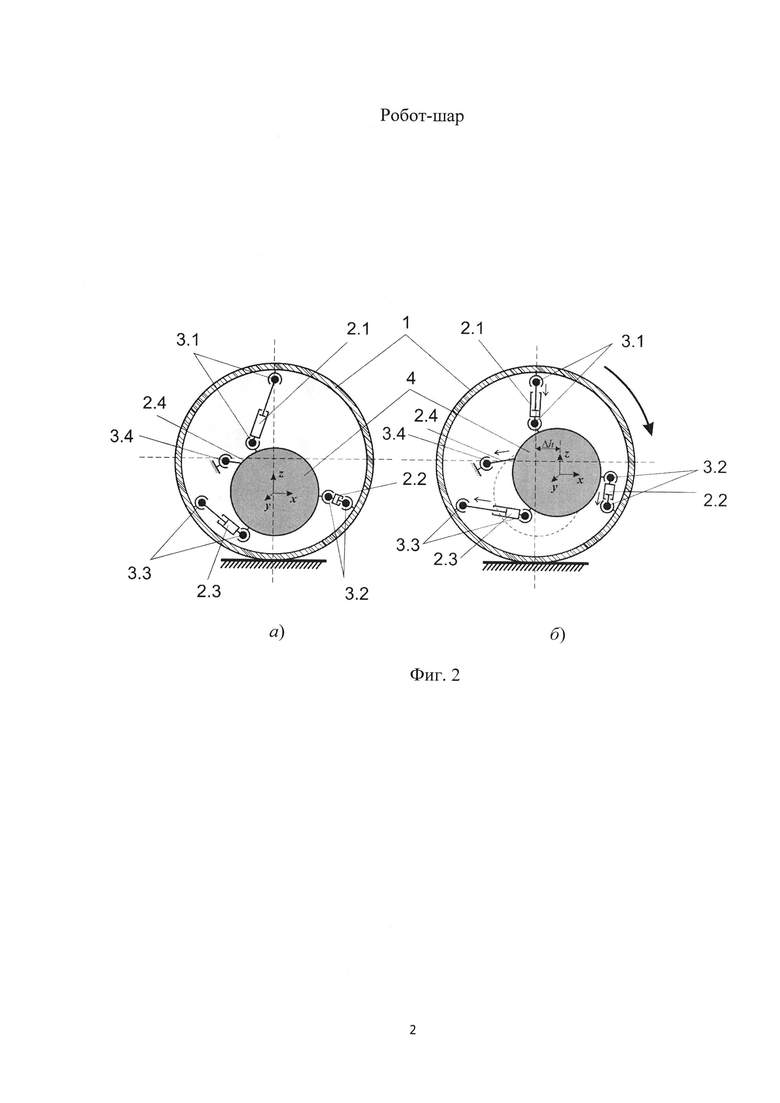
На фиг. 2 изображен процесс движения робота-шара.
Робот-шар содержит корпус 1, который состоит из двух соединенных между собой полусфер, радиально установленные звенья 2.1-2.4, концы которых соединены шарнирами 3.1-3.4 с внутренней поверхностью корпуса 1 и рабочим органом 4. Рабочий орган 4 содержит блок управления, блок питания, систему приводов, сенсорную систему, коммуникационную систему и грузовой отсек (на чертеже не показаны). Параллельный манипулятор состоит из звеньев 2.1-2.4 и шарниров 3.1-3.4.
Робот-шар работает следующим образом.
До начала движения рабочий орган 4 расположен в нижней части корпуса 1 таким образом, чтобы центр тяжести робота-шара находился ниже геометрического центра сферического корпуса, что позволяет роботу находиться в устойчивом стационарном положении (фиг. 2, а). Для осуществления движения в выбранном направлении непосредственно или дистанционно на систему приводов подаются управляющие сигналы, которые приводят в движение звенья 2.1-2.4, т.е. длина звеньев 2.1-2.4 начинает согласованно изменяться и приводит к управляемому смещению рабочего органа 4, а вместе с ним и центр тяжести всего робота из стационарного положения в требуемую сторону движения (фиг. 2, б). В результате появляется вращающий момент относительно геометрического центра сферического корпуса в ту сторону, куда отклонился рабочий орган 4, и корпус 1 робота-шара начинает вращаться. После того как центр тяжести робота-шара опять достигнет стационарного положения, производится очередное смещение рабочего органа 4 в требуемое направление движения. Так, управляемое перемещение рабочего органа 4 параллельного манипулятора приводит робот-шар в непрерывное движение по любой заданной траектории.
Кинематические цепи звеньев манипулятора могут состоять из поступательных и вращательных пар. Число звеньев у параллельного манипулятора может быть различным. Каждое звено управляется одним приводом, который объединен с рабочим органом либо установлен на внутренней поверхности корпуса, что существенно повышает динамику и точность позиционирования рабочего органа внутри корпуса робота-шара. Замкнутая кинематическая цепь параллельного манипулятора обеспечивает высокую жесткость всей конструкции. Так как нагрузка рабочего органа разделяется между приводами, параллельный манипулятор способен обеспечить высокую грузоподъемность, что позволит в рабочем органе разместить большое количество бортового оборудования.
Благодаря тому что параллельный манипулятор способен перемещать центр масс робота в пределах внутренней полости корпуса робота, то ускоренное линейное перемещение рабочего органа может создавать импульс, который позволит роботу-шару поступательно двигаться в заданном направлении. Данные свойства будут полезны для преодоления препятствий на пути робота с помощью прыжков.
Преимуществом данного робота является то, что благодаря всенаправленному перемещению рабочего органа внутри полого сферического корпуса, обеспечивается исключительная подвижность и маневренность, и он способен быстро изменить направление движения с нулевым радиусом разворота.
Источники информации
1. Патент РФ №2315686, МПК: B25J 9/00; B25J 11/00, опубл. 2008.
2. Патент РФ №106215, МПК: B62D 57/00, опубл. 2011 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ В МЕЖТРУБНОМ ПРОСТРАНСТВЕ | 2022 |
|
RU2786065C1 |
| Шарообразный робот (варианты) | 2016 |
|
RU2658683C1 |
| РОБОТ-ШАР | 2005 |
|
RU2315686C2 |
| СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2021 |
|
RU2761923C1 |
| СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2021 |
|
RU2761924C1 |
| Робот манипуляционный промышленный | 2019 |
|
RU2718025C1 |
| Робот-погрузчик сеток с овощами | 2019 |
|
RU2722747C1 |
| Робот-пропольщик с функцией фертигации | 2019 |
|
RU2694588C1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Робот-манипулятор | 2024 |
|
RU2833264C1 |
Изобретение относится к робототехнике и может быть использовано для создания новых моделей как автономных, так и дистанционно управляемых мобильных роботов. Робот-шар содержит полый корпус, выполненный в виде двух соединенных полусфер, рабочий орган и параллельный манипулятор. Параллельный манипулятор состоит из радиально расположенных звеньев, концы которых соединены с шарнирами, закрепленными на внутренней поверхности корпуса и рабочем органе, который снабжен блоком управления, системой приводов и блоком питания. При этом звенья выполнены с возможностью изменения их длины и согласованного с ним управляемого смещения рабочего органа. Технический результат заключается в повышении эффективности движения, маневренности и эксплуатационной надежности. 2 ил.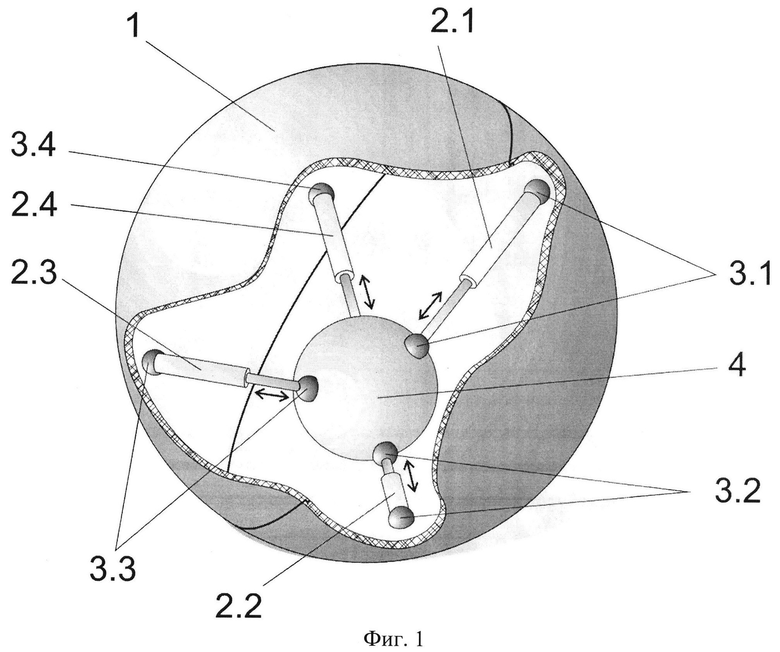
Робот-шар, содержащий полый корпус, выполненный в виде двух соединенных полусфер, и рабочий орган, отличающийся тем, что он содержит параллельный манипулятор, состоящий из радиально расположенных звеньев, концы которых соединены с шарнирами, закрепленными на внутренней поверхности корпуса и рабочем органе, который снабжен блоком управления, системой приводов и блоком питания, причем звенья выполнены с возможностью изменения их длины и согласованного с ним управляемого смещения рабочего органа.
| Щелочной аккумулятор | 1956 |
|
SU106215A1 |
| РОБОТ-ШАР | 2005 |
|
RU2315686C2 |
| US 8316970 B1, 27.11.2012 | |||
| US 6414457 B1, 02.07.2002 | |||
| RU 2004300 C1, 15.12.1993 | |||
| СОЕДИНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ (ВАРИАНТЫ) | 2004 |
|
RU2351457C2 |
| CN 104002887 A, 27.08.2014. | |||

